НЕОБХІДНІ УМОВИ ОПТИМАЛЬНОСТІ. ПРИНЦИП МАКСИМУМУ ПОНТРЯГІНА
1 Загальна задача керованості
Розглянемо керований об'єкт, що описується системою рівнянь
 ,(1) ,(1)
де  – вектор фазового стану об'єкта; – вектор фазового стану об'єкта;  – вектор керування. – вектор керування.
Припустимо, задані початкова й кінцева множини  та та  . Задача керованості полягає у встановленні наступного факту: чи існує на деякому відрізку часу . Задача керованості полягає у встановленні наступного факту: чи існує на деякому відрізку часу  хоча б одне таке припустиме керування хоча б одне таке припустиме керування  , що відповідний йому розв’язок , що відповідний йому розв’язок  рівняння (1) задовольняє граничним умовам рівняння (1) задовольняє граничним умовам
 , ,  .(2) .(2)
Визначення. Об'єкт є керованим на відрізку часу  із множини на множину , якщо існує хоча б одне припустиме керування із множини на множину , якщо існує хоча б одне припустиме керування  таке, що відповідний йому розв’язок задовольняє граничним умовам (2), тобто здійснює перехід з початкової множини на кінцеву множину на відрізку часу . таке, що відповідний йому розв’язок задовольняє граничним умовам (2), тобто здійснює перехід з початкової множини на кінцеву множину на відрізку часу .
Якщо питання про існування оптимального керування вирішено, далі необхідно його знайти (для цього використовуються необхідні умови оптимальності), а потім вибирати оптимальне керування на множині всіх керувань, що задовольняють цим необхідним умовам. Необхідні умови оптимальності, які дозволяють виділити із множини припустимих процесів деяку підмножину процесів, підозрілих на оптимальність, дає принцип максимуму Понтрягіна.
2 Властивості оптимальних керувань
Розглянемо керовану систему із законом (1) за заданих крайових умов
 , ,  ,(3) ,(3)
у якій фазовий вектор  набуває будь-яких значень із простору набуває будь-яких значень із простору  , тобто фазові обмеження відсутні. Вважатимемо також, що на вектор керування , тобто фазові обмеження відсутні. Вважатимемо також, що на вектор керування  накладаються обмеження: накладаються обмеження:
 , ,  , ,  ,(4) ,(4)
де  – вектор-функція, неперервна по всіх змінних і неперервно-диференційована по змінних – вектор-функція, неперервна по всіх змінних і неперервно-диференційована по змінних  ; ;
 – лінійний простір кусково-неперервних на – лінійний простір кусково-неперервних на  функцій. функцій.
Необхідно знайти таке припустиме керування  , що переводить систему з фазового стану , що переводить систему з фазового стану  у фазовий стан у фазовий стан  , причому відповідний припустимий процес , причому відповідний припустимий процес  надає мінімального значення функціоналу надає мінімального значення функціоналу
 ,(5) ,(5)
де функція  неперервна за сукупністю усіх змінних і неперервно-диференційована по змінних . неперервна за сукупністю усіх змінних і неперервно-диференційована по змінних .
Вважатимемо, що час керування  – довільний, тобто кожному припустимому процесу, на якому система переходить зі стану – довільний, тобто кожному припустимому процесу, на якому система переходить зі стану  у стан у стан  , відповідають свої моменти часу , відповідають свої моменти часу  й й  . .
Мають місце наступні властивості оптимальних керувань і траєкторій задачі (1), (3)–(5).
1. Властивості керувань не змінюються при зміщенні уздовж осі  . Отже, якщо керування , , переводить систему зі стану . Отже, якщо керування , , переводить систему зі стану  у стан у стан  , а цільовий функціонал на відповідному припустимому процесі приймає значення , а цільовий функціонал на відповідному припустимому процесі приймає значення  , то для кожного , то для кожного  керування керування  , ,  також переводить систему зі стану в стан і цільовий функціонал при цьому набуває значення (рис. 1). також переводить систему зі стану в стан і цільовий функціонал при цьому набуває значення (рис. 1).
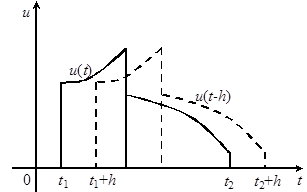
Рисунок 1
Позначимо , …,  – скінченний набір точок фазового простору, для яких існує набір таких керувань – скінченний набір точок фазового простору, для яких існує набір таких керувань  , …, , …,  , що керування , що керування  переводить систему зі стану переводить систему зі стану  у стан у стан  і при цьому цільовий функціонал дорівнює і при цьому цільовий функціонал дорівнює  , ,  (рис. 2). (рис. 2).
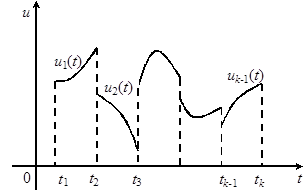
Рисунок 2
Тоді існує кусково-неперервне керування , яке переводить систему зі стану у стан і значення цільового функціоналу при цьому дорівнює
 . .
Зауважимо, що подібна операція неможлива в класі неперервних керувань, тому що в точках стику  побудоване узагальнене керування може мати точки розриву першого роду. побудоване узагальнене керування може мати точки розриву першого роду.
3. Якщо функція  , – оптимальне керування, то фрагмент цієї функції на будь-якому інтервалі , – оптимальне керування, то фрагмент цієї функції на будь-якому інтервалі  , ,  , також є оптимальним керуванням. , також є оптимальним керуванням.
4. Припустимо,  – оптимальна траєкторія, що відповідає керуванню , – оптимальна траєкторія, що відповідає керуванню ,  , ,  . Розглянемо довільний відрізок . Розглянемо довільний відрізок  , і позначимо , і позначимо  , ,  . За таких умов інтеграл . За таких умов інтеграл  на керуванні набуває найменшого значення серед всіх припустимих керувань , що переводять систему зі стану на керуванні набуває найменшого значення серед всіх припустимих керувань , що переводять систему зі стану  в стан в стан  . .
3 Принцип максимуму Понтрягіна
Розглянемо задачу оптимального керування (1), (3)–(5):
 , ,  , ,  , ,
,
, ,  , , , ,
де  , ,  – функції, неперервні за сукупністю всіх змінних і неперервно-диференційовані по змінних . – функції, неперервні за сукупністю всіх змінних і неперервно-диференційовані по змінних .
Перейдемо до  -вимірного простору, елементами якого є вектори -вимірного простору, елементами якого є вектори
 , ,
де  – фазовий вектор задачі, а – фазовий вектор задачі, а  – деяка функція, що задовольняє співвідношенню – деяка функція, що задовольняє співвідношенню
 .(6) .(6)
З останньої формули випливає, що функція  є розв’язком рівняння є розв’язком рівняння
 . .
Приєднавши останнє рівняння до системи (1), дістанемо нову систему
 ,(7) ,(7)
де  ; ;
 . .
Підкреслимо, що праві частини рівнянь системи (7) не залежать від  . З формули (6) випливає, що . З формули (6) випливає, що
 , ,  . .
Таким чином, початкову задачу зведено до задачі вибору припустимого керування , яке здійснює перехід точки  в -вимірному просторі зі стану в -вимірному просторі зі стану  у найближчу точку у найближчу точку  на прямій, що паралельна осі на прямій, що паралельна осі  , і проходить через точку , і проходить через точку  (рис. 3). Пошук оптимального керування тепер полягає в мінімізації величини (рис. 3). Пошук оптимального керування тепер полягає в мінімізації величини  . Дійсно, . Дійсно,
 . .

Рисунок 3
Складемо допоміжну систему
 , ,  ,(8) ,(8)
відносно невідомих функцій  . Ця система називається спряженою системою до системи (7), а змінні – спряженими змінними. . Ця система називається спряженою системою до системи (7), а змінні – спряженими змінними.
Якщо  – припустимий процес, то відповідна цьому процесу система (8) є лінійною однорідною системою диференціальних рівнянь із відомими кусково-неперервними коефіцієнтами. Відомо, що за будь-яких початкових умов ця система має єдиний розв’язок. – припустимий процес, то відповідна цьому процесу система (8) є лінійною однорідною системою диференціальних рівнянь із відомими кусково-неперервними коефіцієнтами. Відомо, що за будь-яких початкових умов ця система має єдиний розв’язок.
Оскільки  , ,  , не залежать від , то , не залежать від , то
 , ,
і перше рівняння системи (8) можна спростити:  , звідки випливає, що , звідки випливає, що  . .
Розглянемо функцію
 ,(9) ,(9)
що називається функцією Понтрягіна, де  – вектор спряжених змінних. Точну верхню грань значень цієї функції по змінній – вектор спряжених змінних. Точну верхню грань значень цієї функції по змінній  при фіксованих при фіксованих  і позначимо через і позначимо через
 . .
Має місце наступна теорема.
Теорема 1 (принцип максимуму). Якщо керування , і відповідна йому фазова траєкторія оптимальні, то існує така ненульова вектор-функція  , що відповідає функціям і (тобто задовольняє спряженій системі (8) з функціями й ), що: , що відповідає функціям і (тобто задовольняє спряженій системі (8) з функціями й ), що:
1. Функція  від змінної від змінної  набуває максимуму в точці набуває максимуму в точці  для будь-якого для будь-якого  : :
 : :  . .
У кінцевий момент часу має місце співвідношення  , ,  . .
Умови теореми 1 дозволяють серед усіх траєкторій, що проходять через дві задані точки й , виділити окремі траєкторії, серед яких перебуває і оптимальна траєкторія, якщо вона існує. Ці умови є необхідними, але не достатніми. Потрібна подальша перевірка знайдених траєкторій на оптимальність. Тільки в найпростішому випадку, коли знайдено лише одну траєкторію, а з деяких міркувань відомо, що оптимальний розв’язок існує, можна стверджувати, що знайдена траєкторія і є оптимальною.
Якщо принципу максимуму задовольняють кілька траєкторій, то для виявлення серед них оптимальної треба застосовувати додаткові умови. Іноді вдається відокремити сторонні траєкторії, порівнюючи значення цільового функціонала. Але оптимальна траєкторія може бути не єдиною, а відкинуті траєкторії, не будучи оптимальними, можуть виявитися локально оптимальними.
Продиференціюємо функцію Понтрягіна (9) за змінними  і і  : :
 , ,  , ,
 , . , .
Тепер співвідношення (7) і (8) можна переписати у вигляді гамільтонової системи:
 .(10) .(10)
Якщо  , , задовольняють системі (10) і умові 1 теореми 1, то функції , , задовольняють системі (10) і умові 1 теореми 1, то функції  і і  змінного є сталими. Умова 2 теореми 1, таким чином, має місце в будь-який момент часу . змінного є сталими. Умова 2 теореми 1, таким чином, має місце в будь-який момент часу .
4 Принцип максимуму для задачі оптимальної швидкодії
Окремим випадком критерію (5) є критерій
 ,(11) ,(11)
який називається критерієм оптимальної швидкодії, а відповідна йому задача – задачею оптимальної швидкодії. Оскільки у формулі (11)  , то функція Понтрягіна , то функція Понтрягіна  для задачі оптимальної швидкодії матиме вигляд: для задачі оптимальної швидкодії матиме вигляд:
 , ,
де  . .
Оскільки перший доданок не залежить від  , то максимум функції по реалізується одночасно з максимумом функції , то максимум функції по реалізується одночасно з максимумом функції
 , ,
де  . Тому далі розглядатимемо нову гамільтонову систему, відкинувши перші рівняння системи (10), що відповідають . Тому далі розглядатимемо нову гамільтонову систему, відкинувши перші рівняння системи (10), що відповідають  : :
 .(12) .(12)
Позначимо
 . .
Можна довести, що
 . .
З теореми 1 відповідно до умов  і і  , випливає, що: , випливає, що:
1)  ; ;
2) вектор-функції  і і  не обертаються в нуль у жодній точці відрізка . не обертаються в нуль у жодній точці відрізка .
На основі теореми 1 можна сформулювати необхідні умови оптимальності в задачі швидкодії.
Теорема 2. Якщо  , – оптимальний процес, то існує ненульовий частинний розв’язок , – оптимальний процес, то існує ненульовий частинний розв’язок  спряженої системи спряженої системи
 , ,  , ,
такий, що:
1. при кожному значенні  функція функція  змінної набуває при змінної набуває при  максимального значення: максимального значення:
 ; ;
у кінцевий момент часу має місце співвідношення  . .
Як і у випадку теореми 1, перевірку умови 2 теореми 2 можна проводити в будь-який момент часу .
|