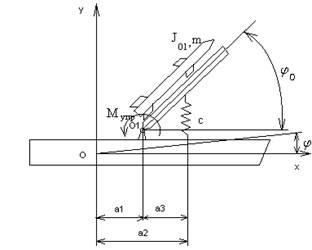
Схема установки: Рис.1
Задание на проект:
Пусковая установка находится на корабле, совершающем колебания (угол  - стационарная функция известного вида.) - стационарная функция известного вида.)
В момент времени t = tк производится пуск ракеты.
Требуется:
1. Получить уравнение малых колебаний ракеты с направляющей с учетом воздействия со стороны корабля.
2. Определить закон изменения момента управляющего двигателя Мупр(t), обеспечивающего минимум среднего значения угловой скорости пусковой установки к заданному моменту времени t = tк. Мощность двигателя ограничена ( | Мупр.| ) )
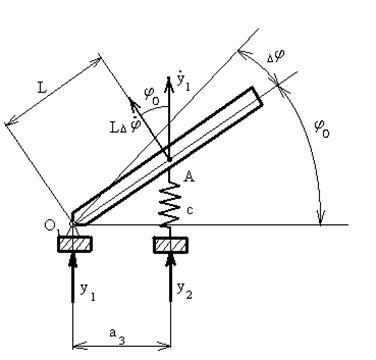
Расчетная схема:
Рис.2
Где точка А считается центром масс платформы с ракетой.
 и и  - кинематическое возбуждение точек основания - кинематическое возбуждение точек основания
 - угол подъема платформы в стационарном состоянии - угол подъема платформы в стационарном состоянии
 - приращение угла (считается малым) - приращение угла (считается малым)
Для определения функций кинематического возбуждения воспользуемся схемой:
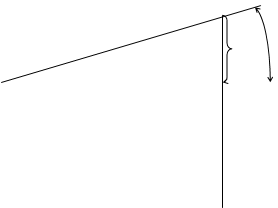
   
  
   
 
Рис.3
Где  , ,  или с учетом малости воздействия или с учетом малости воздействия
 , , 
Тогда возмущающие функции будут иметь вид:
 (1) (1)
 (2) (2)
Кинетическая энергия системы
:
 (3) (3)
 - абсолютная скорость центра масс платформы, - абсолютная скорость центра масс платформы,
 - момент инерции платформы с ракетой, относительно центра масс. - момент инерции платформы с ракетой, относительно центра масс.
По теореме косинусов:  (4), где (4), где 
Таким образом, кинетическая энергия системы запишется в виде:
 (5) (5)
Потенциальная энергия системы
:
Поскольку перемещения системы считаются малыми, а пружина обладает достаточной жесткостью, потенциальной энергией силы тяжести пренебрегаем.
То есть потенциальная энергия системы будет потенциальной энергией, накопленной в пружине.
 (6) (6)
С учетом (1) и (2) получаем:
 (7) (7)
Для записи уравнения движения воспользуемся уравнением Лагранжа:
 (8) (8)
 (9) (9)
 (10) (10)
Учитывая, что  получим: получим:
  (11) (11)
 (12) (12)
Подставляя (11) и (12) в уравнение Лагранжа, получим следующее:
 (13) (13)
Уравнение движения будет иметь вид:
 (14) (14)
Или, с учетом управляющего момента:
 (15) (15)
Считаем, что на систему действуют функция: 
где А –амплитуда, а  -частота вынуждающих функций. -частота вынуждающих функций.
Уравнение движения
можно переписать в виде:
 (16) (16)
где 
Решение этого дифференциального уравнения состоит из двух частей:
1. Решение однородного дифференциального равнения
2. Частное решение неоднородного уравнения
Решение однородного уравнения имеет вид:
 (17) (17)
Частное решение неоднородного уравнения при произвольном воздействии будет выглядеть так:
 (18) (18)
Тогда общее решение дифференциального уравнения
:
 (19) (19)
Выражение для скорости:
 (20) (20)
Компенсирующий двигатель включается в момент времени  . .
Он работает до момента времени  . Мощность двигателя – ограничена. . Мощность двигателя – ограничена.
Интегрирование начинаем в момент времени , но т.к.  функция известного вида, а начальный момент времени - произвольный, то не важно, с какого момента начинать интегрирование, поэтому, начальный момент времени принимаем функция известного вида, а начальный момент времени - произвольный, то не важно, с какого момента начинать интегрирование, поэтому, начальный момент времени принимаем
нулевым. Исходя из подобных соображений, начальные условия так же считаем нулевыми, т.е. 
Таким образом, приходим к выражению для скорости:
 (21) (21)
В момент пуска ракеты угловая скорость вращения платформы должна быть минимальной, в идеале – нулевой, поэтому:
 (22) (22)
Если добиться нулевого значения угловой скорости не представляется возможным, то потребуем нахождения угловой скорости в заданных пределах 
Идеология решения такой задачи такова: Разобьем подинтегральное выражение на два интеграла. Тогда выражение для скорости запишется в следующем виде:

(23)
Необходимо добиться того, чтобы подинтегральные функции имели разные знаки, при этом значения интегралов должны быть равны по модулю.
Функция управляющего момента будет иметь такой вид:
 (23) (23)
где 
Область, ограничивающая управляющий момент:

  
Рис 4.
Если удастся одновременно выполнить оба этих условия, значит задачу можно считать решенной. Если же нет, то можно будет оценить, насколько мы можем компенсировать начальное возмущение, располагая определенной мощностью.
Задаемся следующими параметрами установки:

Тогда остальные параметры будут вычисляться по формулам:
Амплитудное значение возмущающей функции: 
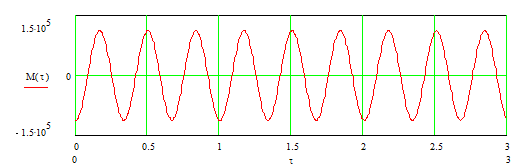
Рассмотрим наиболее «неприятный» случай – когда частота возмущающей функции совпадает с собственной частотой системы, т.е. 
График возмущающей функции  : :
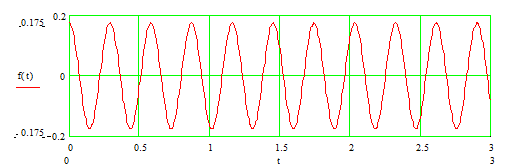
Рис. 5
Момент времени пуска ракеты 
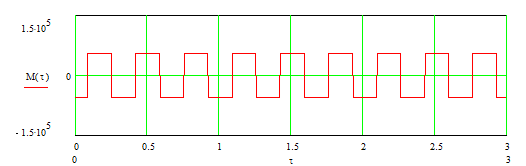
График управляющего момента:
Рис.6
Обозначим функцию 
График этой функции:
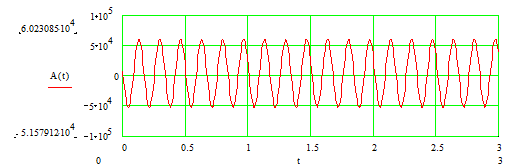
Рис. 7
График функции 
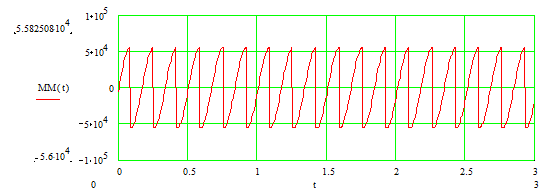
Рис.8
Представим функции  на одном графике: на одном графике:
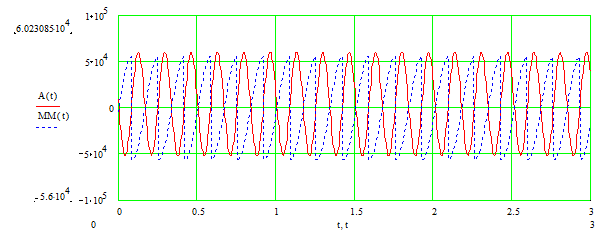
Рис 8.
Тогда для амплитудного значения управляющего момента  , времени пуска ракеты равным 15 с, для заданных параметров установки, значение угловой скорости равно: , времени пуска ракеты равным 15 с, для заданных параметров установки, значение угловой скорости равно:
Амплитудное значение управляющего момента было получено путем подбора, при этом выбиралось минимальное значение угловой скорости.
Для сравнения, выберем управляющий момент двигателя в виде произведения амплитудного значения момента на косинус с обратным знаком, т.е. :

Вид функции управляющего момента представлен на рисунке:
Рис.9
С учетом наложения  : :
Рис.10
Тогда для получения аналогичного значения угловой скорости, а именно для  потребуется амплитудное значение управляющего момента, большее в два раза, чем при предыдущем случае, а именно потребуется амплитудное значение управляющего момента, большее в два раза, чем при предыдущем случае, а именно  . .
Таким образом, обеспечив вид функции управляющего момента двигателя, как 
можно добиться минимального значения угловой скорости к моменту времени пуска ракеты, используя двигатель мощностью меньшей, чем в случае чисто косинусоидального вида управляющего момента.
По найденному амплитудному значению управляющего момента можно подобрать двигатель требуемой мощности, закон движения которого будет изменяться согласно предъявляемым выше требованиям.
|