МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА И ПРОДОВОЛЬСТВИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
БЕЛАРУССКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра автоматизированных систем управления производством
КУРСОВАЯ РАБОТА
по “Основам автоматики”
АНАЛИЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ВОЗДУХА В ЖИВОТНОВОДЧЕСКОМ ПОМЕЩЕНИИ
МИНСК 2007
Содержание
Цель и задание работы
1. Характеристики объекта управления, описание устройства и работы САР, составление её функциональной схемы. Принцип автоматического управления и вид схемы
2. Составление структурной схемы системы
3. Определение закона регулирования системы
4. Определение передаточных функций системы по управляющему
5. Анализ устойчивости системы. Определение запасов устойчивости
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
8. Оценка качества управления по переходным функциям
Общие выводы по работе
Литература
Цель и задание работы
Цель работы: закрепление базовых знаний по курсу «Основы автоматики» на примере проведения анализа системы автоматического регулирования температуры в животноводческом помещении.
Задание
1. Дать краткую характеристику объекта управления, описать устройство и работу системы, составить её функциональную схему. Сделать вывод о принципе автоматического управления, и виде системы.
2. Составить структурную схему системы.
3. Определить закон регулирования системы.
4. Определить пересадочные функции системы по управляющему (задающему), возмущающему воздействиям и для ошибок по этим воздействиям.
5. Выполнить анализ устойчивости системы по критериям Гурвица и Найквиста. Определить запасы устойчивости.
6. Проанализировать зависимость статической ошибки системы от изменения управляющего (задающего) воздействия на систему. Сделать вывод о характере этой зависимости.
7. Провести совместный анализ изменения управляемой (регулируемой) величины объекта управления и системы от возмущающего воздействия в статике. Дать их сравнительную оценку. Определить статическую ошибку системы по возмущающему воздействию.
8. Оценить качество управления по переходным функциям.
9. Сделать общие выводы по работе.
Таблица 1 – исходные данные.
| Вар. |
Сх. |
К1
|
К2
|
Т1,
с |
кд
|
Тд,
с |
ку
|
Т2, с |
КМ
|
| 32 |
9 |
1 |
1 |
500 |
0,2 |
12 |
400 |
33 |
0,1 |
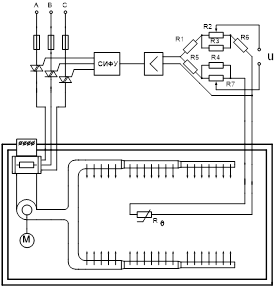
Рисунок 1.
1. Характеристика объекта управления, описание устройства и работы САР, составление её функциональной схемы, принцип автоматического управления
и вид схемы
На рисунке 1 приводим схему заданной системы.
Объектом управления(ОУ) является животноводческое помещение с электрокалорифером. Регулируемой величиной является температура θ внутри сельскохозяйственного помещения. Целью управления является поддержание постоянной температуры θ на постоянном заданном уровне. Управляющим воздействием на ОУ является электрическая мощность РН, подаваемая на электрокалорифер 2. Основное возмущающее воздействие-изменение температуры θН наружного воздуха. Датчиком (Д) является термометр сопротивления (Rθ) 3. Входным сигналом для термометра сопротивления является температура θ внутри помещения, выходной сигнал-сопротивление RД датчика.
Задатчиком являются переменные сопротивления R2 и R7, задающий сигнал-величина сопротивления, которая в определенном масштабе соответствует заданной температуре θЗ.
Сравнивающее устройство (СУ)-это измерительная мостовая схема (М), образованная сопротивлениями Rθ, R1, R2...R7, для которой входным сигналом являются величины сопротивлений Rθ, R2 и R7, выходным сигналом является напряжение разбаланса моста UН, которое в определенном масштабе соответствует ошибке регулирования.
Тиристорный регулятор мощности (вместе с предусилителем) выполняет функции управляемого усилителя (УУ) 4.
На основании этого описания составляем функциональную схему системы (рис.2).
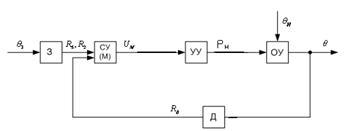
Рис.2. Функциональная схема САР температуры в животноводческом помещении.
Система работает следующим образом:
В установившемся режиме при равенстве температуры  в помещении с заданным значением температуры в помещении с заданным значением температуры  ,мост сбалансирован и его выходное напряжение ,мост сбалансирован и его выходное напряжение  равно 0. При отклонении температуры приточного воздуха от задонного ,например, вселедствии изменения наружной температуры равно 0. При отклонении температуры приточного воздуха от задонного ,например, вселедствии изменения наружной температуры  , сопротивление датчика , сопротивление датчика  изменяется ,мост разбалансируется. Напряжение разбаланса моста ,являющееся сигналам возникновения ошибки системы ,усиливается усилителем и подается на электрокалорифер .Электрокалорифер в приточном воздуховоде начинает работать ,тем самым изменяя степень смешивания холодного наружного воздуха и рециркуляционного воздуха на входе в канал .При понижение температуры электрокалорифер понижает мощность , при повышении – повышает . изменяется ,мост разбалансируется. Напряжение разбаланса моста ,являющееся сигналам возникновения ошибки системы ,усиливается усилителем и подается на электрокалорифер .Электрокалорифер в приточном воздуховоде начинает работать ,тем самым изменяя степень смешивания холодного наружного воздуха и рециркуляционного воздуха на входе в канал .При понижение температуры электрокалорифер понижает мощность , при повышении – повышает .
В результате рассмотрение устройство и работы системы можно сделать следующие выводы.
В системе реализован принцип управление по отклонению (по ошибке). Система является стабилизирующей.
2. Составление структурной схемы системы автоматического регулирования температуры в животноводческом помещении
Структурной схемой называется наглядное графическое изображение математической модели (математического описания) системы.
При математическом описании систему разбивают на отдельные звенья направленного действия, передающие воздействия только в одном направлении – с входа на выход.
На структурной схеме каждое звено изображается прямоугольником, внутри которого записывается математическое описание звена. Связи между звеньями структурной схемы изображаются линиями со стрелками, соответствующими направлению прохождения сигналов. Над линиями ставятся обозначения сигналов.
Составим структурную схему САР температуры в животноводческом помещении. Для этого получим передаточные функции всех элементов системы.
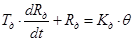
1. Уравнение животноводческого помещения с электрокалорифером, как объекта управления:
 , ,
где  - температура воздуха в помещении - температура воздуха в помещении
 - температура наружного воздуха - температура наружного воздуха
PH, кВт – электрическая мощность, подаваемая на электрокало рифер.
Изображение Лапласа этого уравнения.

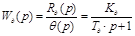
В нашем случае передаточная функция системы по управляющему воздействию  : :

Передаточная функция по возмущающему воздействию (температура наружного воздуха):

Аналогичным образом получим передаточные функции остальных элементов.
2. Датчик температуры Д:
 , ,

3. Задатчик З:
 ; ; ; ; 
4. Сравнивающее устройство мост (М)
 , ,
 ; ; 
5. Управляемый усилитель (УУ) :
 , ,
Усилитель усиливает мощность 
 ; ; 
Составим структурную схему САР.
Задатчик (З) системы является безинерционным. Его коэффициент передачи Кз должен быть равен коэффициент передачи Кд датчика. Поскольку заданная Θз и действительная Θ температуры должны быть в одном масштабе.
Поэтому для наглядности исследования эти коэффициенты Кд=Кз можно принять за СУ и считая, что из заданной температуры Θз непосредственно вычитается измеренная датчиком температура Θд и формируется сигнал ошибки е.
Преобразованная таким образом структурная схема представлена на рисунке.4.
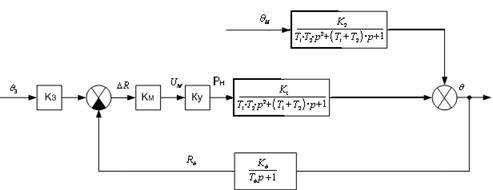
Рисунок.3 Структурная схема САР температуры воздуха в животноводческом помещении.

Рисунок. 4 Структурная схема САР температуры воздуха в животноводческом помещении.
3. Определение закона регулирования системы
Законом регулирования называют математическую зависимость, в соответствии с которой управляющее воздействие на объект формировалось бы безинерционным регулятором в функции от ошибки системы.
Закон регулирования во многом определяет свойства системы. Определим закон регулирования рассматриваемой САР. Для этого найдем передаточную функцию, определяющую взаимосвязь управляющего воздействия на объект и ошибки:
Передаточная функция безынерционного регулятора примет вид:

Окончательно для безинерционного регулятора получаем:
 
Закон управления является пропорциональным (П-закон). Когда управляющее воздействие на объект формируется пропорционально ошибки.
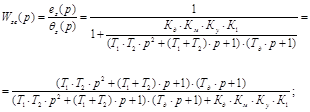
4. Определение передаточных функций системы по управляющему и возмущающему воздействию и для ошибок по этим воздействиям
Передаточная функция САР по управляющему воздействию определяет взаимосвязь между применением регулируемой величины Y(Θ) и изменением задающего воздействия Yз(Θз):
Подставляя численные значения параметров и после некоторых преобразований получим:

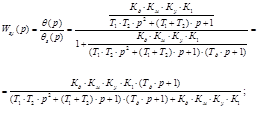
Передаточная функция САР по возмущающему воздействию определяет взаимосвязь между изменением регулируемой величиной Y(Θ) и изменением возмущающего воздействия F(Θн):
 , ,
где  -- передаточная функция цепи звеньев от места приложения возмущающего воздействия до регулируемой величины. Эта функция имеет вид: -- передаточная функция цепи звеньев от места приложения возмущающего воздействия до регулируемой величины. Эта функция имеет вид:
Преобразуем полученное выражение:

Подставим в полученное выражение численные значения и после преобразований получаем:

Передаточная функция для ошибки по управляющему воздействию определяет взаимосвязь между изменением сигнала ошибки е3
и изменением задающего воздействия YЗ
(ΘЗ
):
Для рассматриваемого объекта передаточная функция САР температуры воздуха в птичнике в летний период для ошибки по управляющему воздействию:
Подставляем численные значения и после преобразований получим:

Передаточная функция по возмущающему воздействию определяет взаимосвязь между изменением ошибки еF
и изменением возмущающего воздействия F:


5. Определение запасов устойчивости системы. Анализ устойчивости системы
Устойчивость – это свойство системы возвращаться в исходный или близкий к нему установившийся режим после снятия воздействия, вызвавшего выход из установившегося режима.
Неустойчивая система является не работоспособной, поэтому проверка устойчивости является обязательным этапом анализа системы.
Анализ устойчивости по критерию Гурвица.
Определим устойчивость САР температуры воздуха в птичнике в летний период. Для этого воспользуемся любой из полученных в предыдущем пункте передаточных функций, из которых следует, что характеристическое уравнение системы:

Для анализа устойчивости воспользуемся условиями устойчивости для уравнения четвертой степени:
   
   
Все коэффициенты характеристического уравнения положительны.
Проверяем второе условие:


Полученный результат показывает, что система устойчива.
Анализ устойчивости по критерию Найквиста.
Этот критерий основан на использовании амплитудно-фазовой частотной характеристики (АФЧХ) разомкнутой системы. Формально частотную передаточную функцию можно найти заменой переменной p на переменную jw.Разомкнем систему (место размыкания показано волнистой чертой на рисунок.4.). Передаточная функция разомкнутой системы имеет вид:

Все звенья разомкнутой системы устойчива, поскольку три звена имеют 3-й порядок, их характеристические коэффициенты положительны.
Строим АФЧХ разомкнутой системы, рассчитываем значения  и и  . Для упрощения расчетов пользуемся следующими правилами: . Для упрощения расчетов пользуемся следующими правилами:
- модуль двойной части передаточной функции равен отношению модуля числителя к модулю знаменателя;
- модуль произведения равен произведению модулей;
- аргумент произведения равен сумме аргументов;
Построим АФЧХ разомкнутой системы, рассчитав значения и .где -модуль частотной передаточной функции, -аргумент частотной передаточной функции

где  вещественная часть частной передаточной функции вещественная часть частной передаточной функции
 мнимая часть мнимая часть


Для построения АФЧХ разомкнутой системы представим частотную передаточную функцию в виде:


По этим выражениям, придавая  значения от 0 до ∞, строим на комплексной плоскости АФЧХ разомкнутой системы (рис.5). значения от 0 до ∞, строим на комплексной плоскости АФЧХ разомкнутой системы (рис.5).
Пример расчета при =0,05. Воспользуемся формулами вышеизложенными.


Таблица 2. – Результаты расчёта.
|
0 |
0,001 |
0,005 |
0,008 |
0,01 |
0,03 |
0,05 |
∞ |
 |
8 |
7,06 |
2,78 |
1,77 |
1,4 |
0,34 |
0,14 |
0 |
 |
0 |
-2,22 |
-4,53 |
-16,31 |
-32,4 |
-102,8 |
-117,9 |
-270 |
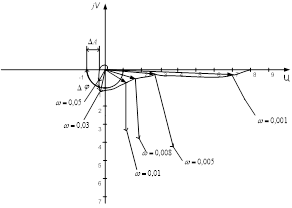
Рисунок.5. АФЧХ разомкнутой системы.
Определение запасов устойчивости
Основное распространение в качестве меры запаса устойчивости получили вытекающие из критерия Найквиста 2 величины – запас устойчивости по фазе, чтобы система оказалась на границе устойчивости по амплитуде ΔА.
Запас устойчивости по амплитуде определяется величиной ΔА допустимого увеличения АЧХ, при котором система окажется на границе устойчивости.
Величины Δφ и ΔА показаны на рисунке 5. Для определения Δφ проводится дуга радиусом 1 до пересечения с АФЧХ. При проектировании САУ рекомендуется выбирать Δφ ≥ 300
и ΔА ≥ 0,7. Для нашего случая САР температуры воздуха в птичнике Δφ ≈ 780
и ΔА ≈ 0,72, что удовлетворяет рекомендуемым величинам запаса устойчивости по фазе и амплитуде.
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
При выполнении такого анализа используют передаточную функцию системы для ошибки по управляющему воздействию.
В статике (при р=0) обращается в ноль, поэтому статическая ошибка по управляющему воздействию отсутствует.

где к – коэффициент передачи разомкнутой системы.

После подстановки численного значения к получаем: 
Рассматриваемая система имеет статическую ошибку, пропорциональную изменению управляющего воздействия на систему. Из выражения для статической ошибки следует, что величина статической ошибки тем меньше, чем больше коэффициент передачи разомкнутой системы.
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
Для проведения такого анализа пользуются передаточными функциями объекта управления и системы по возмущающему воздействию, а также передаточной функцией системы для ошибки по возмущающему воздействию.
Так как в статике (при р=0) обращается в ноль.
Получим:
Для системы
После подстановки численных значений получаем зависимость изменения температуры на объекте при изменении наружной температуры:
 – для объекта без регулятора; – для объекта без регулятора;
 – для объекта с регулятором (САР). – для объекта с регулятором (САР).
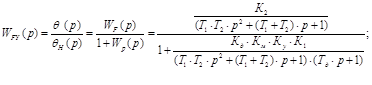
Передаточная функция системы для ошибки по возмущающему воздействию:
Поэтому ест
=
Таким образом температура воздуха в животноводческом помещении не оборудованного регулятором изменяется также, как изменяется наружная температура. В животноводческом помещении с регулятором изменение температуры уменьшилось по сравнению с изменением температуры в К+1 раз. В нашем случае температура внутри составляет около 11% от изменения наружной температуры. Это свидетельствует о том, что эксплуатационные качества животноводческого помещения с точки зрения постоянства поддержания требуемой температуры существенно улучшилось.
8. Оценка качества управления по переходным функциям
Качество переходных процессов в линейных системах обычно оценивают по переходным функциям.
Переходной функцией h(t) называется график изменения во времени управляемой (регулируемой) величины системы при подаче на систему единичного управляющего или возмущающего воздействий.
Показатели качества управления, определяемые непосредственно по переходным функциям, называют прямыми показателями качества управления.
Рассмотрим оценку прямых показателей качества управления для нашей системы.
Отклонение регулируемой величины
от своего установившегося значения характеризуется следующими показателями.
Для переходной функции по управляющему воздействию определяется перерегулирование:
 , ,
где  - максимальное значение регулируемой величины в переходном процессе; - максимальное значение регулируемой величины в переходном процессе;
 - установившееся значение регулируемой величины. - установившееся значение регулируемой величины.
В нашем случае

Перерегулирование характеризует запас устойчивости системы. В нашем случае система полностью устойчива. Для переходных функций по возмущающему воздействию определяется максимальное отклонение регулируемой величины от установившегося значения, приходящейся на единицу возмущающего воздействия F(t):
 . .
В нашем случае


Рис.6 Переходная функция по управляющему воздействию САР температуры в животноводческом помещении.
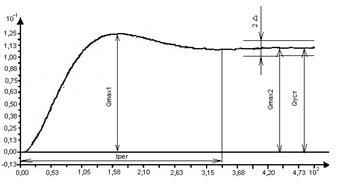
Рис.7 Переходная функция по возмущающему воздействию САР температуры в животноводческом помещении.
Быстродействие системы
оценивается временем регулирования. Время регулирования  определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ∆: определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ∆:
 . .
Примем 
В нашем случае для переходной функции по возмущающему воздействию:
 ; ;  с (рисунок. 6). с (рисунок. 6).
Для переходной функции по управляющему воздействию:
 ; ;  с (рисунок. 7). с (рисунок. 7).
Колебательность переходного процесса
определяется числом N перерегулирований для переходной функции по управляющему воздействию или числом колебаний N для переходной функции по возмущающему воздействию за время переходного процесса. В нашем случае N=1.
Перерегулирование и максимальное отклонение регулируемой величины от установившегося значения также служат оценкой колебательности.
Для переходного процесса по управляющему воздействию (рисунок. 6):

Для переходного процесса по возмущающему воздействию (рисунок. 7):

Статическая ошибка системы:

что приблизительно совпадает с результатом, полученным в разделе 6 при  . .
Статическая ошибка по возмущающему воздействию:

По результатам выполнения этого раздела для САР температуры воздуха в птичнике в летний период, следует сделать следующие выводы:
Для рассмотренной системы перерегулирование составляет 13,6%, число перерегулирований и колебаний системы за время переходного процесса N=1. Качество системы по этим показателям следует считать удовлетворительным.
Время регулирования составляет около  с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет  , колебательность системы около 0,05, изменение статической ошибки системы при изменении задающего воздействия и возмущающего воздействия составляет 11% от изменения этих воздействий. , колебательность системы около 0,05, изменение статической ошибки системы при изменении задающего воздействия и возмущающего воздействия составляет 11% от изменения этих воздействий.
Общие выводы по работе
Объектом управления САР температуры воздуха в животноводческом помещении, является помещение с электрокалорифером.
Управляющим воздействием на объект является степень смешивания холодного и регулирующего воздуха. Основное возмущающее воздействие –изменения температуры наружного воздуха. Закон регулирования системы пропорциональный. Система устойчива. Система является астатической.
Прямые оценки показателей качества управления следующие: перерегулирование  , число пререгулирований N=1, что удовлетворяет требованиям и свидетельствует о достаточном запасе устойчивости. , число пререгулирований N=1, что удовлетворяет требованиям и свидетельствует о достаточном запасе устойчивости.
Время регулирования с, максимальное отклонение регулируемой величины от её установившегося режима приходящееся на единицу ступенчатого возмущения равно , колебательность системы равна 0,083. Качество системы следует считать удовлетворительным.
Литература
1. Юревич Е. Н. Теория автоматического управления. – Л.: Энергия, 1975.—416с
2. Бородин И. Ф., Кирилин Н. И. Основы автоматики и автоматизации производственных процессов. – М.: Колос, 1977. – 328с.
3. Теория автоматического управления. Ч.1./ Н. А. Бабанов, А. А. Воронов и др. – М.: Высш шк., 1986. – 367с.
4. Солодовников В. В., Плотников В. Н., Яковлев А. В. Основы теории и элементы систем автоматического регулирования. – М.: Машиностроение, 1985. – 536с.
5. Средства автоматики и телемеханики./Н.И. Бохан, И. Ф. Бородин, Ю. В. Дробышев, С. Н. Фурсенко, А. А. Герасенков. – М.: Агропромиздат, 1992. –351с.
6. Бородин И. Ф. Технические средства автоматики. – М.: Колос, 1982. – 303с.
7. Бохан Н. И., Фурунжиев Р. И. Основы автоматики и микропроцессорной техники. – Мн.: Ураджай, 1987. - 376с.
|