Контрольная работа
по курсу АПЭА
Тема: "Асинхронные двигатели"
Устройство трёхфазной асинхронной машины
Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами с1, с2, с3, концы – с4, с5, с6.
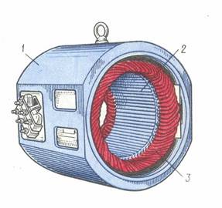
Рис. 2.1
Начала и концы фаз выведены на клеммник (рис. 2.2 а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 2.2 б) или треугольник (рис. 2.2 в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл = 660В по схеме звезда или в сеть с Uл =380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.
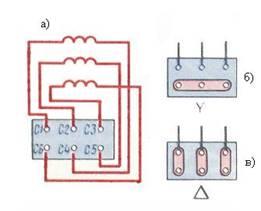
Рис. 2.2
Сердечник ротора (рис. 2.3 б) набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов: короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).
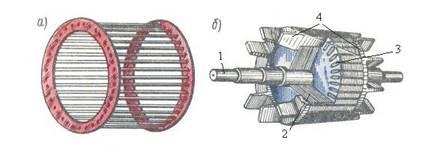
Рис. 2.3
Короткозамкнутая обмотка (рис. 2.3) ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает «беличье колесо» и называют её типа «беличьей клетки» (рис. 2.3 а). Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
На рис. 2.4 приведен вид асинхронной машины с фазным ротором в разрезе: 1 – станина, 2 – обмотка статора, 3 – ротор, 4 – контактные кольца, 5 – щетки.
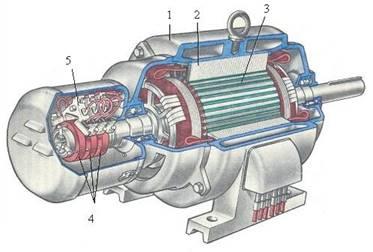
Рис. 2.4
У фазного ротора обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины. На рис. 2.5 приведено условное обозначение асинхронного двигателя с короткозамкнутым (а) и фазным (б) ротором.
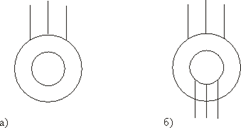
Рис. 2.5
На рис. 2.6 приведен вид асинхронной машины с короткозамкнутым ротором в разрезе: 1 – станина, 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора с короткозамкнутой обмоткой, 5 – вал.
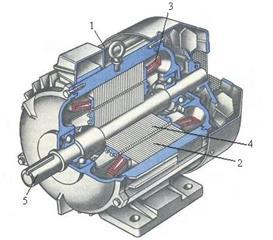
Рис. 2.6
На щитке машины, закреплённом на станине, приводятся данные: Рн, Uн, Iн, nн, а также тип машины.
Рн – это номинальная полезная мощность (на валу)
Uн и Iн – номинальные значения линейного напряжения и тока для указанной схемы соединения. Например, 380/220, Y/∆, IнY/Iн∆.
nн – номинальная частота вращения в об/мин.
Тип машины, например, задан в виде 4AH315S8. Это асинхронный двигатель (А) четвёртой серии защищённого исполнения. Если буква Н отсутствует, то двигатель закрытого исполнения.
315 – высота оси вращения в мм;
S – установочные размеры (они задаются в справочнике);
8 – число полюсов машины.
Получение вращающегося магнитного поля
Условия получения:
наличие не менее двух обмоток;
токи в обмотках должны отличаться по фазе
оси обмоток должны быть смещены в пространстве.
В трёхфазной машине при одной паре полюсов (р=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (р=2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д.
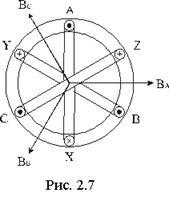
Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов (р=1) (рис. 2.7). Оси обмоток фаз смещены в пространстве на угол 120° и создаваемые ими магнитные индукции отдельных фаз (BA, BB, BC) смещены в пространстве тоже на угол 120°.
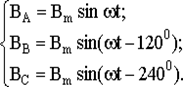
Магнитные индукции полей, создаваемые каждой фазой, как и напряжения, подведённые к этим фазам, являются синусоидальными и отличаются по фазе на угол 120°.
Приняв начальную фазу индукции в фазе А (φA) равной нулю, можно записать:
Магнитная индукция результирующего магнитного поля определяется векторной суммой этих трёх магнитных индукций.

Найдём результирующую магнитную индукцию (рис. 2.8) с помощью векторных диаграмм, построив их для нескольких моментов времени.
а)
При 
t=0 

б)
При 



в)
При 


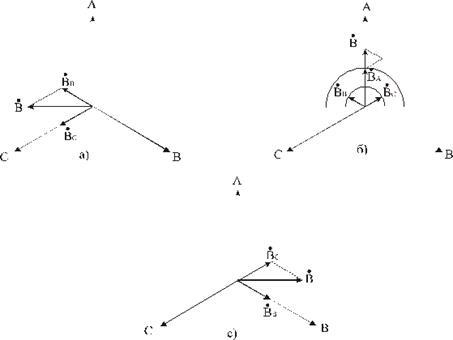
Рис. 2.8
Как следует из рис. 2.8, магнитная индукция B результирующего магнитного поля машины вращается, оставаясь неизменной по величине. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Величина результирующей магнитной индукции

Частота вращения магнитного поля n0 зависит от частоты сети f и числа пар полюсов магнитного поля р.
n0 = (60 f) / p, [об/мин].
Обратите внимание, что частота вращения магнитного поля не зависит от режима работы асинхронной машины и её нагрузки.
При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля ω0, которая определяется соотношением:
ω0 = (2 π f) / p = π n0 / 30, [рад/сек].
Режимы работы трёхфазной асинхронной машины
Асинхронная машина может работать в режимах двигателя, генератора и электромагнитного тормоза.
Режим двигателя
Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую.
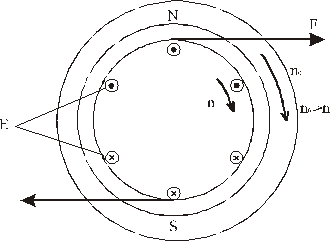
Рис. 2.9
Пусть обмотка статора создаёт магнитное поле, вращающееся с частотой n0 в указанном направлении (рис. 2.9). Это поле будет наводить согласно закону электромагнитной индукции в обмотке ротора ЭДС. Направление ЭДС определяется по правилу правой руки и показано на рисунке (силовые линии должны входить в ладонь, а большой палец нужно направить по направлению движения проводника, т.е. ротора, относительно магнитного поля). В обмотке ротора появится ток, направление которого примем совпадающим с направлением ЭДС. В результате взаимодействия обмотки ротора с током и вращающегося магнитного поля возникает электромагнитная сила F. Направление силы определяется по правилу левой руки (силовые линии должны входить в ладонь, четыре пальца – по направлению тока в обмотке ротора). В данном режиме (рис. 2.9) электромагнитная сила создаст вращающий момент, под действием которого ротор начнёт вращаться с частотой n. Направление вращения ротора совпадает с направлением вращения магнитного поля. Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения магнитного поля. Для реверса двигателя нужно изменить порядок чередования фаз подведённого напряжения, т.е. переключить две фазы.
Пусть под действием электромагнитного момента ротор начал вращаться с частотой вращения магнитного поля (n = n0). При этом в обмотке ротора ЭДС E2 будет равна нулю. Ток в обмотке ротора I2 = 0, электромагнитный момент M тоже станет равным нулю. За счёт этого ротор станет вращаться медленнее, в обмотке ротора появится ЭДС, ток. Возникнет электромагнитный момент. Таким образом, в режиме двигателя ротор будет вращаться несинхронно с магнитным полем. Частота вращения ротора будет изменяться при изменении нагрузки на валу. Отсюда появилось название двигателя – асинхронный (несинхронный). При увеличении нагрузки на валу двигатель должен развивать больший вращающий момент, а это происходит при снижении частоты вращения ротора. В отличие от частоты вращения ротора частота вращения магнитного поля не зависит от нагрузки. Для сравнения частоты вращения магнитного поля n0 и ротора n ввели коэффициент, который назвали скольжением и обозначили буквой S. Скольжение может измеряться в относительных единицах и в процентах.
S = (n0 – n) / n0 или S = [(n0 – n) / n0] 100%
При пуске в ход асинхронного двигателя n=0, S=1. В режиме идеального холостого хода n = n0, S=0. Таким образом, в режиме двигателя скольжение изменяется в пределах:
0 < S ≤ 1.
При работе асинхронных двигателей в номинальном режиме:
Sn = (2 ÷ 5)%.
В режиме реального холостого хода асинхронных двигателей:
Sхх = (0,2 ÷ 0,7)%.
Режим генератора
Этот режим служит для преобразования механической энергии в электрическую, т.е. асинхронная машина должна развивать на валу тормозной момент и отдавать в сеть электрическую энергию. Асинхронная машина переходит в режим генератора, если ротор начинает вращаться быстрее магнитного поля (n > n0). Этот режим может наступить, например, при регулировании частоты вращения ротора.
Пусть n > n0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента (рис. 2.10). Машина начинает развивать на валу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т.е. направление передачи электрической энергии).
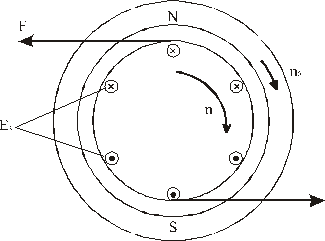
Рис. 2.10
При n > n0, S = 0.
При n → +∞, S → -∞.
Таким образом, в режиме генератора скольжение изменяется в пределах:
0 > S > -∞.
Режим электромагнитного тормоза
Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т.е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении.
Согласно рис. 2.11 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдёт реверс.
В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины.
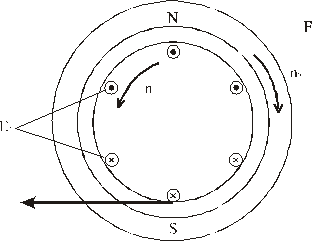
Рис. 2.11
При n = n0, S = 1.
При n → -∞, S → +∞.
Таким образом, в режиме электромагнитного тормоза скольжение изменяется в пределах:
0 < S < ∞.
Процессы в асинхронной машине
Цепь статора
а) ЭДС статора.
Магнитное поле, создаваемое обмоткой статора, вращается относительно неподвижного статора с частотой n0 = (60 f) / p и будет наводить в обмотке статора ЭДС. Действующее значение ЭДС, наводимой этим полем в одной фазе обмотки статора определяется выражением:
E1 = 4,44 w1 k1 f Ф,
где: k1=0.92÷0.98 – обмоточный коэффициент;
f1=f – частота сети;
w1 – число витков одной фазы обмотки статора;
Ф – результирующее магнитное поле в машине.
б) Уравнение электрического равновесия фазы обмотки статора.
Это уравнение составлено по аналогии с катушкой с сердечником, работающей на переменном токе.
Здесь Ú и Ú1 – напряжение сети и напряжение, подведённое к обмотке статора.
R1 – активное сопротивление обмотки статора, связанное с потерями на нагрев обмотки.
x1 – индуктивное сопротивление обмотки статора, связанное с потоком рассеяния.
z1 – полное сопротивление обмотки статора.
İ1 – ток в обмотке статора.
При анализе работы асинхронных машин часто принимают I1 z1 = 0. Тогда можно записать:
U1 ≈ E1 = 4,44 w1 k1 f Ф.
Из этого выражения следует, что магнитный поток Ф в асинхронной машине не зависит от её режима работы, а при заданной частоте сети ƒ зависит только от действующего значения приложенного напряжения U1. Аналогичное соотношение имеет место и в другой машине переменного тока – в трансформаторе.
Цепь ротора
а) Частота ЭДС и тока ротора.
При неподвижном роторе частота ЭДС f2 равна частоте сети f.
f2 = f = (n0 p) / 60.
При вращающемся роторе частота ЭДС ротора зависит от частоты вращения магнитного поля относительно вращающегося ротора, которая определяется соотношением:
n' = n0 – n.
Тогда частота ЭДС вращающегося ротора:

Частота ЭДС ротора изменяется пропорционально скольжению и в режиме двигателя имеет наибольшее значение в момент пуска в ход.
Пусть при f = 50 Гц, номинальное скольжение Sн = 2%. Тогда при номинальной частоте вращения ротора f2 = f × Sн = 1 Гц.
Таким образом, в обмотке ротора асинхронной машины частота наводимой ЭДС зависит от частоты вращения ротора.
б) ЭДС ротора.
При неподвижном роторе f2 = f и действующее значение ЭДС определяется по аналогии с E1.
E2 = 4,44 w2 k2 f Ф,
где: w2 и k2 – соответственно число витков и обмоточный коэффициент обмотки ротора.
Если ротор вращается, то f2 = f × Sн и ЭДС вращающегося ротора определяется соотношением:
E2S = 4,44 w2 k2 f2 Ф = E2 S.
ЭДС, наводимая в обмотке ротора, изменяется пропорционально скольжению и в режиме двигателя имеет наибольшее значение в момент пуска в ход.
Отношение ЭДС статора к ЭДС неподвижного ротора называется коэффициентом трансформации асинхронной машины.

в) ток ротора.
Запишем уравнение равновесия для одной фазы короткозамкнутого ротора.
При неподвижном роторе.

где: x2 = 2 π f L2 – индуктивное сопротивление обмотки неподвижного ротора, связанное с потоком рассеяния;
R2 – активное сопротивление обмотки ротора, связанное с потерями на нагрев обмотки.
При вращающемся роторе.

где: – индуктивное сопротивление обмотки вращающегося ротора.
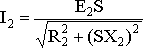
Для тока ротора в общем случае можно получить такое соотношение:
Отсюда следует, что ток ротора зависит от скольжения и возрастает при его увеличении, но медленнее, чем ЭДС.
г) поле ротора
Обмотка ротора, как и обмотка статора, является многофазной и при появлении в ней тока создаёт своё вращающееся магнитное поле. Обозначим через n2 частоту вращения магнитного поля ротора относительно ротора.
n2 = (60 f2) / p= (60 f S) / p.
Здесь p – число пар полюсов обмотки ротора, оно всегда равно числу пар полюсов обмотки статора.
Относительно статора магнитное поле ротора вращается с частотой

Из полученного соотношения следует, что магнитное поле ротора относительно статора вращается с той же частотой, что и магнитное поле статора. Таким образом, магнитные поля ротора и статора относительно друг друга неподвижны. Поэтому при анализе работы асинхронной машины можно применить те же соотношения, что и трансформаторе.
Ток статора
Так как результирующее магнитное поле асинхронной машины не зависит от её режима работы, можно составить для одной фазы уравнение магнитодвижущих сил, приравняв магнитодвижущую силу в режиме холостого хода к сумме магнитодвижущих сил в режиме нагрузки.
 – составляющая тока статора, которая компенсирует действие магнитодвижущей силы обмотки ротора. Полученное выражение для тока статора отражает свойство саморегулирования асинхронной машины. Чем больше ток ротора, тем больше ток статора. В режиме холостого хода ток статора минимальный. В режиме нагрузки ток статора возрастает. Ток реального холостого хода асинхронной машины и значительно больше по сравнению с номинальным током, чем у трансформатора. Это объясняется тем, что величина тока I0 зависит от магнитного сопротивления среды, в которой создаётся магнитное поле. У асинхронной машины, в отличие от трансформатора, есть воздушный зазор, который создаст большое сопротивление магнитному полю. – составляющая тока статора, которая компенсирует действие магнитодвижущей силы обмотки ротора. Полученное выражение для тока статора отражает свойство саморегулирования асинхронной машины. Чем больше ток ротора, тем больше ток статора. В режиме холостого хода ток статора минимальный. В режиме нагрузки ток статора возрастает. Ток реального холостого хода асинхронной машины и значительно больше по сравнению с номинальным током, чем у трансформатора. Это объясняется тем, что величина тока I0 зависит от магнитного сопротивления среды, в которой создаётся магнитное поле. У асинхронной машины, в отличие от трансформатора, есть воздушный зазор, который создаст большое сопротивление магнитному полю.
Электромагнитный момент асинхронной машины
Электромагнитный момент возникает при наличии магнитного поля, создаваемого обмоткой статора, и тока в обмотке ротора. Можно показать, что электромагнитный момент определяется соотношением:
М=СФI2cosψ2.
Здесь:  – конструктивный коэффициент; – конструктивный коэффициент;
ω0 = 2 π f / p – скорость вращения магнитного поля;
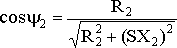
ψ2 – сдвиг по фазе между ЭДС и током ротора;
I2 cos ψ2 – активная составляющая тока ротора.
Таким образом, величина электромагнитного момента зависит от результирующего магнитного поля Ф и активной составляющей тока ротора.
На рис. 2.12 приведено пояснение влияния cosψ2 на величину электромагнитного момента: а) ψ2 = 0°, (cos ψ2 = 1); б) ψ2 = 90°, (cos ψ2 = 0).
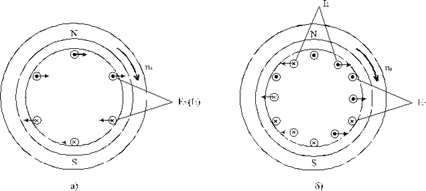
Рис. 2.12.
Как следует из рис. 2.12а, если ψ2 = 0°, в создании электромагнитного момента участвуют все проводники обмотки ротора, т.е. момент имеет наибольшее значение. Если ψ2 = 90° (рис. 2.12 б), результирующая электромагнитная сила и момент равны нулю.
В режиме двигателя при изменении нагрузки на валу изменяется частота вращения ротора, что приводит к изменению скольжения, частоты тока ротора, индуктивного сопротивления ротора и cosψ2. В результате изменяется вращающий момент. На рис. 2.13 приведено пояснение влияния индуктивного сопротивления ротора на угол ψ2: а) при S=1 (пуск в ход); при S≤1 (после разгона). Наибольшие значения ЭДС и частота тока ротора имеют в момент пуска в ход, когда скольжение S=1. При этом f2 = f1, X2 >> R2, угол ψ2 близок к 90° (рис. 2.13 а).
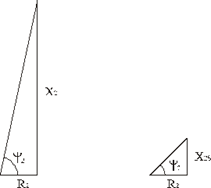
Рис. 2.13
За счет малого cosψ2 в момент пуска в ход асинхронные двигатели имеют ограниченный пусковой момент. Кратность пускового момента (по сравнению с номинальным) у них составляет
Мпуск / Mн = 0,8 ÷ 1,8.
Причем большие цифры относятся к двигателям специальной конструкции с улучшенными пусковыми свойствами.
По мере разгона ротора двигателя частота тока ротора падает, уменьшается индуктивное сопротивление ротора Х2S и угол ψ2 уменьшается (рис. 2.13 б). Это приводит к увеличению вращающего момента и дальнейшему разгону двигателя.
Подставим в выражение для электромагнитного момента соотношения для I2, cosψ2 и Ф, полученные ранее:
 , , 
Тогда

Используя соотношение
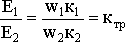
где: ктр – коэффициент трансформации асинхронной машины.
Выразим Е2 =E1 / ктр, а Е1 приравняем к напряжению U1, подведенному к обмотке статора (Е1≈U1). В результате получим другое выражение для электромагнитного момента, которое удобно использовать при анализе работы машины, при построении ее характеристик
Из полученного выражения для электромагнитного момента следует, что он сильно зависит от подведенного напряжения (М). При снижении, например, напряжения на 10%, электромагнитный момент снизится на 19% (М. Это является одним из недостатков асинхронных двигателей, так как приводит на производстве к снижению производительности труда и увеличению брака.
Зависимость электромагнитного момента от скольжения
Выражение для электромагнитного момента (*) справедливо для любого режима работы и может быть использовано для построения зависимости момента от скольжения при изменении последнего от +∞ до -∞ (рис. 2.14).
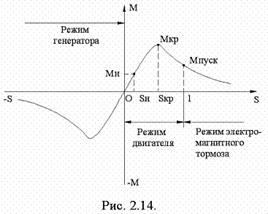
Рассмотрим часть этой характеристики, соответствующая режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Мпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Мкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя
Мкр / Mн = λ = 2 ÷ 3.
Из анализа формулы (*) на максимум можно получить соотношения для Мкр и Sкр
Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1 снижается перегрузочная способность асинхронного двигателя.
Из выражения (*), разделив М на Мкр, можно получить формулу, известную под названием «формула Клосса», удобную для построения M = f(S).
Если в эту формулу подставить вместо М и S номинальные значения момента и скольжения (Мн и Sн), то можно получить соотношение для расчета критического скольжения.
Участок характеристики (рис. 2.14), на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (Мн, Sн). В пределах изменения скольжения от 0 до Sкр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
Литература
1 Электротехника: Учебник для неэлектротехнических специальностей вузов/ Зейдель Х.Э., Коген-Далин В.В., Крымов В.В. и др.; Под ред. В.Г. Герасимова. – М.: Высш. шк., 1985. – 480 с., ил.
2 Данилов А.И., Иванов П.М. Общая электротехника с основами электроники: Учебное пособие для студентов неэлектротехнических специальностей средних специальных учебных заведений. – 4-е изд., стер. – М.: Высш. шк., 2000. – 752 с., ил.
3 Липатов Д.Н. Вопросы и задачи по электротехнике для программированного обучения: Учеб. пособие для студентов вузов. – 3-е изд., испр. и доп. – М.: Энергоатомизадт, 1984. – 360 с., ил.
4 Задачник по электротехнике: Учеб. пособие/ П.Н. Новиков, В.Я. Кауфман, О.В. Толчеев и др. – 2-е изд., стер. – М.: ИРПО; Изд. центр «Академия», 1999. – 336 с., ил.
5 Электротехника с основами электроники: Руководство к лабораторным работам на стендах ЭВ-4/ Составители: Н.П. Блинова, Г.И. Волович, Ю.А. Губочкин, Г.П. Дубовицкий, И.М. Коголь, В.П. Кормухов, Г. А Машихина, Л.В. Мурзина, Л.В. Розенфельд, А.Я. Эргард, В.Я. Яковлев; Под ред. В.П. Кормухова. – Челябинск: ЧГТУ, 1992. – 67 с., ил.
6 Электротехника, электроника, электрооборудование: Методические указания к выполнению лабораторных работ / Составители: Волков Ю.К., Дубовицкий Г.П., Клиначёв Н.В., Коголь И.М., Кормухов В.П. и д.р.; Под редакцией Губочкина Ю.А. – Челябинск: ЮУрГУ, 1999.
7 Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство/ Пер. с нем. – М.: Мир, 1982.
8 Хоровиц П., Хилл У. Искусство схемотехники: В 3 т./ Пер. с англ. – М.: Мир, 1993
|