Федеральное агентство по образованию и науке РФ
Брянский государственный технический университет
Кафедра
"Автоматизированный электропривод"
Пояснительная записка
к курсовой работе по ТАУ
Студент гр.05ПЭ:
Фролов С.В.
Преподаватель:
Зотин Д.В.
Брянск 2008
Содержание
1. Введение
2. Расчет коэффициента усиления САУ
3. Расчет и построение внешних статических характеристик САУ
4. Определение передаточной функции исходной САУ, расчет корней характеристического уравнения
5. Расчет и построение частотных характеристик эквивалентной разомкнутой САУ: АФЧХ, ЛАЧХ и ЛФЧХ
6. Моделирование переходных характеристик исходной САУ
7. Проверка на устойчивость исходной САУ по критерию Гурвица
8. Синтез корректирующего устройства
9. Моделирование переходных процессов в скорректированной САУ. Определение типовых показателей качества в динамике
10. Заключение
11. Литература
Введение
Курсовая работа является одним из этапов изучения дисциплины "Теория автоматического управления" и имеет своей целью приобретение навыков расчета параметров элементов систем автоматического управления (САУ) и анализа их характеристик.
Данная работа предусматривает возможность практического применения знаний, полученных на лекциях и в процессе самостоятельной подготовки. При выполнении курсовой работы необходимо решить ряд задач, тематика которых отражает основные разделы изучаемой дисциплины.
1. Расчет коэффициента усиления САУ
Рассчитаем коэффициент усиления К САУ, при котором суммарная статическая ошибка  не будет превышать допустимой величины. не будет превышать допустимой величины.
Кроме коэффициента усиления на величину ошибки влияют значения управляющего и возмущающего воздействий.Наибольшая величина достигается при действии на систему минимального управляющего воздействия g и максимального возмущения z. Такимобразом, при единичном коэффициенте передачи цепи обратной связи исходной системы суммарная статическая ошибка может быть найдена как:
  , ,
где y- выходная переменная.

Значение y определяется реакцией САУ на сумму управляющего и возмущающего воздействий:

где K1,
K2
– статические коэффициенты передачи соответственно звена W1
(p) и W2
(p).


Выражаем из (2) у:



Подставим полученное значение в (1):

Подставим числовые значения и найдем значение К.

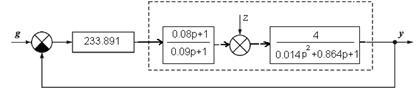
K=233,891 - коэффициент усиления регулятора.
2. Расчет и построение внешних статических характеристик САУ
Построимсемейства внешних статических характеристикдля замкнутой САУ в заданном диапазоне g и z. Аналитически характеристики заданы уравнением:
 . .  
Подставим численные значения:

выполняем расчет для gmin
=0.5:
выполняем расчет для g=3,25:
выполняем расчет для gmax
=6:
Теперь найдем статические ошибки для каждого задающего воздействия g:
 % %
gmin
=0,5 
g=3,25 
gmax
=6 
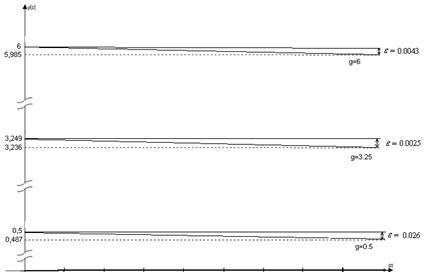
Рис.1 График семейства статических характеристик
Статическая ошибка максимальна (=2.6% ) при задающем воздействии g=0.5.
3. Определение передаточной функции исходной САУ, расчет корней характеристического уравнения
Для данной САУ запишем и преобразуем передаточную функцию W(p):
 , ,



Запишем характеристическое уравнение и найдем его корни.
Характеристическое уравнение имеет вид:
 =0 =0
Корни характеристического уравнения найдем при помощи приложения программы MathCAD:
р1
= -37,87; р2,3
=-17,48±241.93j
Таким образом по корням характеристического уравнения мы можем предположить, что система устойчива.
4. Расчет и построение частотных характеристик эквивалентной разомкнутой САУ: АФЧХ, ЛАЧХ и ЛФЧХ
Передаточная функция W(p) для эквивалентной разомкнутой САУ выглядит следующим образом :

Зная, что KOC
=1и значение остальных сомножителей запишем W(p):

Теперь запишем частотную функцию W(jω):

Введем подстановку:
a=1-0.09176ω2
;
b=0.954ω-0.00126ω3
;
c=2806.692;
d=74.84512ω
Преобразуем полученное выражение:

 ; ;
 ; ;
 ; ;

Подставим числовые значения:
ac=2806.692-257.542ω2
da=74.845ω-6.868ω3
cb=2677.584ω-3.536ω3
bd=71.402ω3
-0.0943ω4
a2
=1-0.18352ω2
+0.00842ω4
b2
=0.91ω2
-0.0024ω4
+0.00000159ω6
Теперь раскроем скобки и преобразуем полученные выражения:ωcp

-АФЧХ.

-ЛАЧХ.

-ЛФЧХ.
Для построения частотных характеристик составим следующую модель:

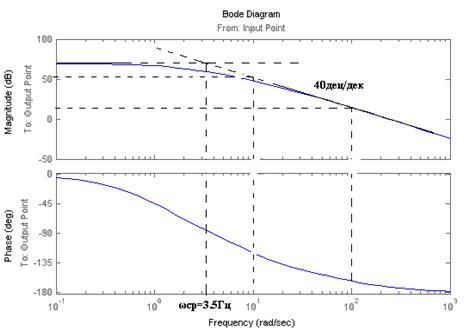
Рис.2 ЛАЧХ и ЛФЧХ исходной САУ
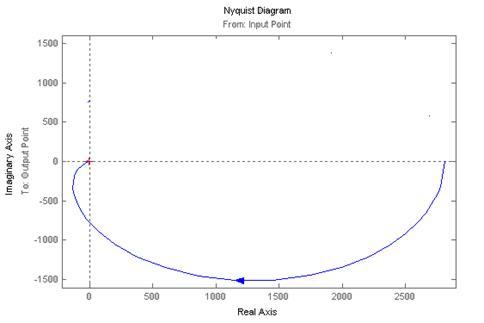
Рис.3 АФЧХ исходной САУ
Для определения устойчивости разомкнутой САУ по критерию Найквиста, нужно на АФЧХ посмотреть, охватывает ли АФЧХ точку с координатой (-1,0) или нет.

Рис.4 АФЧХ в точке (-1;0)
Так как АФЧХ исходной САУ (рис.4) не охватывает охватывает точку с координатой  , то САУ является устойчивой. , то САУ является устойчивой.
5. Моделирование переходных характеристик исходной САУ
Строим следующую модель в MATLAB

а) При отсутствие возмущений для граничных значений g, переходная характеристика имеет следующий вид:
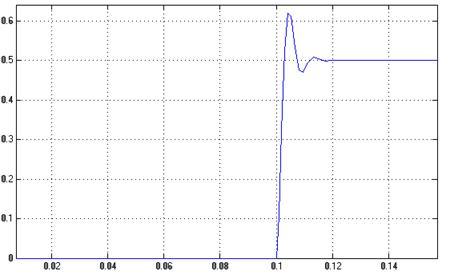
Рис.5 Переходная характеристика САУ при отсутствие возмущений(gmin
=0.5)
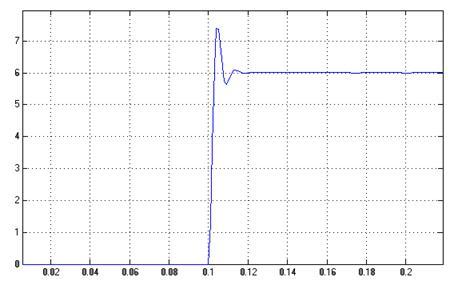
Рис.6 Переходная характеристика САУ при отсутствие возмущений(gmax
=6)
б) При максимальных возмущениях для граничных значений g, переходная характеристика имеет следующий вид:

Рис.7 Переходная характеристика САУ при максимальных возмущениях(gmin
=0.5)
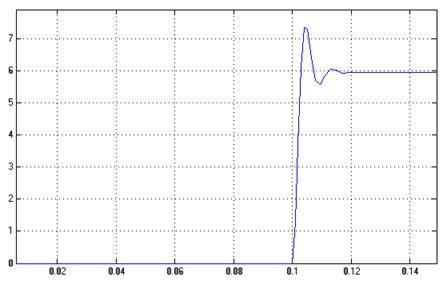
Рис.8 Переходная характеристика САУ при максимальных возмущениях(gmax
=6)
6. Проверка на устойчивость исходной САУ по критерию Гурвица
Передаточная функция исходной САУ имеет вид:

Характеристический полином (знаменатель  ) имеет вид: ) имеет вид:
 ,где ,где
   
Составим по нему характеристическое уравнение:

Составим и подсчитаем определитель Гурвица:

Найдем значение определителя:
Δ=2807.692*(0.09176*75.799-0.00126*2807.692)=9595.64
Определитель больше нуля, что согласно критерию Гурвица свидетельствует об устойчивости системы.
7. Синтез корректирующего устройства
Синтез корректирующего устройства проводится для обеспечения оптимальных показателей качества регулирования САУ путем настройки ее на симметричный оптимум.
Желаемая передаточная функция разомкнутой системы, настроенной на симметричный оптимум, имеет вид:

Обозначив передаточную функцию корректирующего устройства (регулятора)  и определив передаточную функцию разомкнутой системы и определив передаточную функцию разомкнутой системы , ,  можно записать следующим образом: можно записать следующим образом:

Находим значение коэффициента демпфирования:

Т.к. коэффициент демпфирования  =3,089 >0,7, то полином второго порядка можно разложить на множители: =3,089 >0,7, то полином второго порядка можно разложить на множители:

Преобразованная передаточная функция имеет вид:

Получаем:

 выбираем как наименьшую постоянная времени нескорректированной системы. =0.02с выбираем как наименьшую постоянная времени нескорректированной системы. =0.02с
Находим  : :



Представим передаточную функцию регулятора в виде типовыхзвеньевТАУ:

Модель скорректированной САУ в MATLAB:

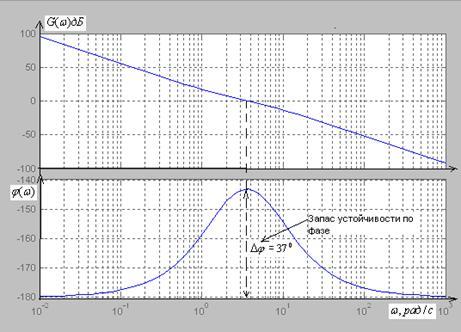
Рис.7 ЛАЧХ и ЛФЧХ скорректированной САУ
Из графиков видно, что запас устойчивости по амплитуде бесконечен, т.к. ЛФЧХ не пересекает угол -180:

Запас устойчивости по фазе имеет конечное значение ; ;
8. Моделирование переходных процессов в скорректированной САУ.Определение типовых показателей качества в динамике
а) Моделирование переходных процессов скорректированной САУ при ступенчатом изменении задающего и минимального возмущающего воздействия. Определение типовых показателей качества в динамике.

Рис.8 Переходный процесс скорректированной САУ для 
Перерегулирование составляет  .Время регулирования tр
=2,2с. .Время регулирования tр
=2,2с.

Рис.9 Переходный процесс скорректированной САУ для 
Перерегулирование составляет  .Время регулирования tр
=2,20с. .Время регулирования tр
=2,20с.
б) Моделирование переходных процессов скорректированной САУ при ступенчатом изменении задающего и максимального возмущающего воздействия. Определение типовых показателей качества в динамике.

Рис.10 Переходный процесс скорректированной САУ для 
Перерегулирование составляет  .Время регулирования tр
=9,8-4,3=5,5с. .Время регулирования tр
=9,8-4,3=5,5с.

Рис.11 Переходный процесс скорректированной САУ для 
Перерегулирование составляет  .Время регулирования tр
=6,8-4,15=2,65с .Время регулирования tр
=6,8-4,15=2,65с
Заключение
В ходе курсовой работы была исследована линейная система автоматического управления (САУ).Был выполнен анализ данной САУ, а в частности, построены её временные и частотные характеристики, произведена проверка на устойчивость, также была обеспечена настройка исходной САУ на симметричный оптимум по средствам введения корректирующего устройства, рассчитаны параметрыкачества регулирования скорректированной САУ.
По результатам выполненной работы можно сделать следующие выводы:
- Параметры статического режима определяются по построенным внешним статическим характеристикам. Видно, что исходная система обладает статической ошибкой, которая характеризуется наклоном графиков. Наибольший наклон соответствует максимальной статической ошибке (статизму).
- Параметры динамического режима определяются по построенным временным (переходным) и частотным характеристикам исходной САУ. По полученным характеристикам и проведённым аналитическим расчётам был выполнен анализ исходной САУ на устойчивость и сделан вывод о её неустойчивости (по корням характеристического полинома, критерию Найквиста и Гурвица, по ЛАЧХ и ЛФЧХ).
- Для придания исходной САУ устойчивости, а также оптимальных параметров качества регулирования (по задающему воздействию), был выполнен её синтез и настройка на симметричныйоптимум.
Данная работа позволила закрепить теоретический курс по данной дисциплине и получить навыки расчёта и анализа систем автоматического управления.
Литература
1. Теория автоматического управления: учебникдля вузов. Ч.1. Теория линейных систем автоматического управления / Под редакцией А. А. Воронова.- 2-е издание, перераб. И доп. – М.: Высш. Шк., 1986.
2. Теория автоматического управления: учебникдля вузов. – Под редакцией А. В. Нетушила. – 2-е изд., перераб. И доп.- М.: Высш. Шк.,1976.
3. Теория автоматического управления. /Под ред. Воронова А.А.-М.; Высш.шк., 1986г.
4. Макаров И.М., Менский Б.М. Линейные автоматические системы. М.: Машиностроение, 1982г.
5. Ящугин В.А. Теория линейных непрерывных систем автоматического управления в вопросах и ответах.-М.: Высш. шк., 1986г.
6. Певзнер Л.Д. Теория систем управления.- М.: Издательство Московского государственного горного университета, 2002г.
|