Введение
Любая современная система управления состоит из двух компонентов: компьютера и системы связи. Любой из них может преобладать в зависимости от конкретных функций, но оба существуют в той или иной степени. Существуют системы для зданий, заводов, больниц, железных дорог, кораблей, автодорог, квартир и т.д. По пути следования электроэнергии от электростанции к подстанциям, распределительным трансформаторам, питающим дома и предприятия, существует управляющая система, использующая компьютеры. В больнице за пациентом наблюдают с помощью мониторов, диагностического и лечебного оборудования, подключенного к компьютерной сети. Спутники тоже имеют свою управляющую систему, где компьютеры хранят и обрабатывают информацию. Количество датчиков и электроприводов в управляющих системах обычно составляет от десятков до сотен тысяч единиц. Обычно, каждое управляемое устройство имеет 2-3 порта ввода/вывода. В таких системах количество узлов (датчиков и электроприводов) значительно больше, чем управляющих компьютеров, и все они должны быть обеспечены связью.
В настоящее время технологии сетей управления отстают от передовых компьютерных решений примерно на десять лет. Основным направлением развития является улучшение связей внутри распределенных систем. На первый взгляд, требования к системам контроля, работающим в различных областях должны быть также различны. Но, оказывается, подобно компьютерам, установленным на различных предприятиях, в офисах или дома, системы контроля выполняют схожие функции. Также похожи и требования к адресации, надежности, размеру пакетов и др. Конечно существуют и различия в типах разъемов и кабелей, установке и управлении.
1.
Обзор сетевых технологий контроля
1.1
Определение требований к системам управления
Существуют общие функции систем для работы в любой среде и существуют уникальные, то есть присущие каждому конкретному использованию.
Требования к системе можно разделить на семь направлений:
1. Размер системы и взаимоувязанность составляющих ее частей
2. Надежность системы
3. Гибкость системы
4. Производительность системы
5. Системная интеграция
6. Установка, обслуживание и диагностика
7. Расходы в течение жизненного цикла
Все эти пункты и направления должны определяться в контексте конкретной системы с целью получения правильных результатов.
1.2
Размер системы и взаимоувязанность составляющих ее частей
Размер системы и ее разделение на подсистемы обуславливает адресное пространство, (количество отдельно адресуемых узлов системы) его деление между подсистемами, что сказывается на удобстве использования и производительности системы. Обычно один агрегат или машина содержит 10 – 100 адресуемых элементов. Подсистема может содержать 10 – 32000 узлов и в системе может существовать более 100 подсистем. Можно организовать систему по иерархическому принципу, и обходится на каждом уровне небольшим адресным пространством, но такие системы уже устарели, т.к. одноуровневая архитектура обладает лучшими характеристиками. В случае использования одноуровневой архитектуры сегментация осуществляется логически. С этой целью применяются маршрутизаторы сетевого уровня. Внутри одноуровневой архитектуры гибкая система адресации позволяет использовать короткие адреса в небольших системах и длинные в системах контроля крупных предприятий, офисных зданий и транспортных объединений.
1.3
Надежность системы
| Задача, решаемая системой |
Применяемое решение. |
| Надежная передача сообщений, контроль целостности |
· N-кратная передача сообщения без подтверждения.
· Передача сообщений одноадресных, мультиадресных, циркулярных с получением подтверждения от каждого (а не любого) адресуемого узла.
· Проверочная циклическая контрольная сумма.
· Механизм запрос-ответ для подтверждения успеха приема.
· Система аутентификации отправителя сообщений.
|
| Защита от сбоев |
· Избыточность за счет дублирования узлов, линий, сетей.
· Кольцевые топология для сохранения связи при локализованном обрыве.
|
| Изоляция сбойных участков и восстановление. |
· Применение маршрутизаторов и кольцевой топологии
· Автоматическая идентификация сбойного узла.
· Дистанционное управление посредством удаленных команд процессом изоляции и отключения узлов.
|
Таблица 1.1.
На первый взгляд кажется, что наличие механизма передачи сообщений без подтверждения приема отрицательно влияет на надежность системы, но на самом деле это не так. В случае если необходимо передать сообщение большому количеству устройств одновременно, их подтверждения получения вызовут приостановку передачи других сообщений, к тому же, многие узлы не имеют устройств обратной связи. Ожидание подтверждения может создавать состояния ожидания в системе. Конечно, никто не спорит, что тотальное применение этого механизма снижет общую надежность системы.
В случаях повышенных требований к надежности системы применяется механизм обязательного подтверждения. Функция подтверждения приема повышает надежность системы. Множественные подтверждения позволяют получить подтверждения от большого количества узлов. Однако, следует учитывать, что этот механизм предъявляет повышенные требования к протоколу и его реализации.
Аутентификация отправителя сообщений необходима для защиты от несанкционированного доступа. Эта функция существует почти во всех системах управления: от домашней до промышленной.
Защита от сбоев может осуществляться с помощью дополнительных трансиверов, узлов, линий или даже сетей. Кольцевые участки топологии представляют прекрасную защиту против всевозможных обрывов кабеля. Таким образом подстраховываются от широкого круга инцидентов от потери кабеля в распределительных щитах до случайной обрезки кабеля во время профилактических работ электриков. Однако это требует дополнительных возможностей, как от трансиверов, так и от архитектуры всей системы. Для первых необходима поддержка быстрого гашения сигнала при достижении им конца пути, для второго требуется система идентификации и уничтожения дубликатных пакетов.
1.4
Гибкость системы
Необходимость расширения системы во время ее работы зависит от конкретной области применения. Управляющая система автомобиля вряд ли нуждается в расширении (если конечно Вам лично этого не захочется). С другой стороны, поточная линия обязательно перенастраивается и снабжается дополнительными, порой загадочными, датчиками при каждом переходе на новую модель продукции. Системы контроля зданий или предприятий нуждаются в расширении несколько раз в течение жизненного цикла. В случаях если предприятие осваивает новую продукцию или расширяет производство, существующие датчики либо заменяются, либо дополняются более точными. Вот тут то и возникает необходимость гибкости наращиваемости длины линий (проводов или беспроводных каналов) а так же свободной топологии. Возможность тянуть провод от ближайшей доступной точки без оглядки на ограничения топологии и возможность добавления дополнительных репитеров по мере необходимости сильно продлевает срок службы Вашей управляющей сети. Однако для этого требуется наличие энергонезависимой памяти в каждом узле сети и наличие как локальной (на самом узле) так и удаленной процедур добавления нового устройства в протоколе управления устройствами. Эти процедуры должны быть определены недвусмысленно, ясно и четко и быть безошибочно реализованы так чтобы всевозможные узлы и приборы могли взаимодействовать между собой.
| Задача, решаемая системой |
Применяемое решение |
Расширение системы,
Изменения
|
- Достаточное количество свободных адресов.
- Возможность легкого расширения.
- Свободная топология подключения, беспроводная связь.
- Легкое подключение/отключение устройств (физически и логически).
|
Таблица 1.2.
1.5
Производительность системы
Производительность системы в целом зависит от многих факторов. Вот некоторые из них.
- Максимально возможная скорость передачи.
Этот параметр непосредственно влияет на время прохождения пакета в линии. Например, для 100-битного пакета время прохождения составляет 0,1 микросекунды при скорости 1Mbps и 1 миллисекунду при скорости 100Kbps. Очень полезна возможность варьировать скорость передачи в широких пределах, от нескольких килобит в секунду до мегабайта в секунду. Обдуманный выбор скорости передачи - наиболее желательный способ оптимизации соотношения цена/производительность для трансиверов, среды передачи и сетей связи.
- Схема доступа к среде передачи.
Демократический доступ к среде передачи для всех при минимальном количестве узлов идентификации – крайне необходим для предотвращения возникновения патологической ситуации для узлов с низким приоритетом. При недемократической схеме доступа, когда приоритет является единственным критерием доступа к сети, узлы с низким приоритетом могут быть полностью задавлены более разговорчивыми. Это может снизить их производительность до неприемлемого уровня. В мире PLC контроллеров (Programmable Logical Controller), который наиболее “подвинут” в сторону “детерминизма” и где доступ к среде возможен лишь в фиксированные промежутки времени, схема с мультиплексированной шиной управляемой приоритетами наименее приемлема.
- Максимальный размер пакета.
Это непосредственно определяет число пакетов и, следовательно, время, требуемое для завершения транзакции. В приведенной ниже таблице представлена информация о длине пакета в различных областях применения.
Дискретные датчики
Фотоэлектрические датчики
Датчики приближения
Дискретные активаторы
Контакторы
Стартеры электродвигателей
Кнопки
Соленоиды
|

Аналоговые /сложные датчики
LVDT
Датчик деформаций
Измеритель потока (например газовый счетчик)
Термопара/термистор
Датчик давления
Аналоговые активаторы
Позиционер
Электроклапан
Электродвигатель с регулируемым числом оборотов
|

Инструменты
Счетчик частиц
Измеритель кислотности
Хроматограф
Интерферометр
Интеллектуальные активаторы
Одиночный петлевой контроллер
Интеллектуальный контроллер электродвигателя
Прочие аналоговые цепи ввода/вывода мощностью 4-20ma
|

Устройства, обрабатывающие интенсивный поток данных
Экран вывода сообщений
Регистраторы данных
Сложные устройства ввода/вывода
Устройства поблочного ввода/вывода
Сканеры полоскового кода
Сканеры линии
Машинное зрение
RF ID Tags
|

Супервизорные контроллеры
Промышленные
Компьютеры типа PC, VME, SDT-32
Станции SCADA
Консоль оператора
Порт RS-232
|
| 1-4 байта на пакет |
2-10 байт на пакет |
5-25 байт на пакет |
10-250 байт на пакет |
1-1000 и более байт на пакет |
Таблица 1.3.
Практически все системы, даже такие дорогостоящие как системы освещения или разрозненные производственные системы с большим количеством цифровых датчиков, содержат аналоговые или сложные (analog/complex) датчики и активаторы (приводы). И эти датчики требуют поддержки пакетов размером 4-25 бит для обычных данных и несколько более длинных пакетов для передачи калибровочных данных. Более того, чем устройство интеллектуальней, тем длина пакета больше. Уже на сегодняшний день характерный размер передаваемых данных составляет 30 байт, а в ближайшие несколько лет обещает вырасти до 50 и более байт.
В общем, можно выделить два основных требования:
- как можно больший максимальный размер пакета;
- возможность варьировать длину пакета от нуля до максимального.
На следующих двух рисунках проиллюстрировано отличие между единой сетью, поддерживающей передачу пакетов разной длины (рисунок 1.1.), и объединением нескольких сетей, каждая из которых поддерживает передачу пакетов только фиксированной длины (рисунок 1.2.). Метод передачи больших пакетов путем разбивки в несколько маленьких (фрагментация) лучше использовать как вспомогательный, хотя он позволяет повысить производительность. Совершенно очевидно, что единая сеть, поддерживающая пакеты разной длины без использования фрагментации, наиболее предпочтительна.

Рисунок 1.1. Единая сеть, поддерживающая передачу пакетов разной длины.
Рисунок 1.2. Объединение нескольких сетей, каждая из которых поддерживает передачу пакетов только фиксированной длины.
- По-событийное обновление показаний датчиков.
Режим сканирования или опроса изменений наиболее соответствует естественному поведению датчиков, производящих измерения только при свершении некоторого события, а не в строго определенные моменты времени. Более того, процесс измерения (например, в аналого-цифровом преобразователе) должен быть завершен как можно быстрее, и система, при которой моменты завершения измерений происходят в строго определенные периодические моменты времени, не самая оптимальная. По-событийная система требует наличия по-событийного планировщика на оконечных устройствах, одноуровневого доступа к сети и существования принимающего узла, который имеет коммуникационные и вычислительные ресурсы для обработки поступающих значений, если таковое требуется. Это влечет за собой соответствующие изменения архитектуры каждого элемента управляющей цепи.
- Одноуровневая архитектура.
Такая архитектура позволяет связываться устройствам прямо через сеть управления. Это делает ненужным центральный контроллер, являющийся узким местом всей системы. Как было замечено ранее, центральный контроллер – просто исторический артефакт тех времен, когда вычислительные мощности были сосредоточены в больших центральных машинах. С приходом недорогих СБИС с достаточными вычислительными ресурсами, такая архитектура стала полностью вымирающей и ненужной. Независимо от демократического одноуровневого доступа к среде передачи и по-событийного обновления показаний датчиков, одноуровневая система также требует достаточной интеллектуальности для датчиков и активаторов (особенно для активаторов) для обеспечения прямого выполнения управляющего алгоритма (и производства необходимых действий) вместо ожидания управляющей команды от центрального котроллера, вырабатываемой на основе обработки данных от датчиков.
- Выделенный прикладной процессор.
Многократно повторяющиеся прерывания прикладного процессора на обработку приходящих пакетов или других коммуникационных задач отрицательно влияют на производительность в обоих случаях. Они также влияют на надежность узла и системы в целом. Пусть занятый канал послал десять пакетов с интервалом 100 микросекунд при размере пакета 100 бит и скорости 1 мегабит в секунду и ждет подтверждения приема каждого пакета. На обработку прерывания, возникающего при приеме пакета, процессор тратит не менее 25 микросекунд и в итоге приложению может не хватить времени на сортировку приходящих пакетов, осуществление процесса ввода/вывода, выполнения локальных вычислений и генерацию пакетов с ответом. Таким образом, на приемном конце пакеты могут быть потеряны. Потерянные пакеты приведут к срыву завершения транзакции и могут вызвать остановку работы сети в целом.
- Задержки при прохождении роутеров (маршрутизаторов) и шлюзов.
Роутеры, соединяющие подсети, должны работать на уровне приложений модели OSI/ISO, если реализация сетевого уровня протокола не предполагает маршрутизации на своем уровне. Для иллюстрации отличия между маршрутизацией прикладного и системного уровня, приведем аналогию с почтовой службой. Письмо. Посылаемое из города А в город Б, может быть отсортировано прямо по адресу города и доставлено (маршрутизация сетевого уровня). Во втором случае, клерк на почте не читает адрес города, а только фамилии адресата и отправителя и должен помнить, что мистер Джонс из города А всегда пишет мистеру Грину в город Б (маршрутизация прикладного уровня). Такая система требует больше ресурсов и работает медленнее. Читатель может сам сделать выводы о производительности, масштабируемости, восстанавливаемости и гибкости на основании приведенного примера.
- Прогнозируемость.
Прогнозируемость (Determinism) иногда упоминается как фактор, влияющий на производительность без уточнения почему. Однако тот детерминизм, который упоминается везде и всюду, есть прогнозируемость системного уровня и означает, что цикл измерения завершится в течении строго определенного временного интервала, начиная с возникновения события или условия, заставившего датчик сработать. Такая прогнозируемость невозможна в реальном мире за исключением традиционных однопоточных систем полностью контролируемых центральным устройством, подобным PLC (Programmable Logical Controller), выполняющим постоянное сканирование в строго определенные моменты времени, использующим централизованно управляемую шину типа точка-точка или шину с множественным доступом и временным разделением. Схема с прослушиванием несущей и контролем коллизий не гарантирует прогнозируемости уровня соединений (link level determinism). Такие технологии как предупреждение коллизий, разрешение коллизий, определение коллизий, система приоритетов и их комбинации, будучи применяемы в рамках CSMA схемы доступа (carrier-sense multiple access), могут увеличить прогнозируемость системы. Должна существовать возможность включать и выключать эти дополнительные подпротоколы избирательно для канала, узла или параметров узла без остановки всей системы.
Решающим фактором, обеспечивающим максимум прогнозируемости системного уровня, является существование выделенного приложения и коммуникационных ресурсов на каждом узле. Большинство процессоров узлов в управляющих системах фактически работают по стохастическому расписанию, поскольку они работают не в режиме фиксированных интервалов измерений полностью независимом от прерываний. События в виде сигналов от локальных датчиков или в виде пакетов, приходящих по сети от удаленных датчиков, стохастичны по своей природе. Они происходят не в фиксированные моменты времени, а как бог на душу положит. Узел, управляемый прерываниями недетерминирован от рождения. К примеру, сканирование проходящего трафика в занятом канале и сортировка приходящих пакетов иногда может приостановить на длительное время выполнение прикладных задач, таких как опрос датчиков и генерация выходных событий.
Суммируя все вышесказанное можно заключить, что прогнозируемость уровня соединений может быть максимизирована для всех узлов путем выбора таких дополнительных механизмов, как предотвращение коллизий, разрешение коллизий, выявление коллизий, система приоритетов доступа. Прогнозируемость уровня приложений может быть улучшена путем введения выделенных приложений и коммуникационных ресурсов, которые не прерывают друг друга. Все факторы, влияющие на прогнозируемость конкретной управляющей цепи, должны быть оптимизированы для эффективной работы.
Однако, прогнозируемость, как объективная реальность, более похожа на требования к “реально быстрым” системам, нежели на требования к системам “реального времени”. Цель первых иллюзорна и препятствует выработке любого реального решения. Второе требует системного подхода и предполагает оптимизационные решения для системных требований реального времени.
- Системная интеграция.
Системная интеграция - это ключевая область, в которой требуется глубокое понимание реализации системной архитектуры, сервисных протоколов, средств разработки и инструментария. Легкость системной интеграции имеет прямое влияние на стоимость установки и текущей эксплуатации. В бытовых условиях это означает, что даже десятилетние дети и пожилые родители могут изменять конфигурацию системы безопасности без вызова специалиста. В случае офисного здания разница стоимости установки системы может достигать 20%, что может составлять от сотен тысяч до нескольких миллионов долларов и достаточна, чтобы возбудить дискуссию с покупателем. На производственном предприятии экономия может составлять до 40%.
Наиболее важным из вышеперечисленных факторов является качество реализации стека протоколов передачи данных. Обзор наиболее качественных решений выделяет различия в целесообразности их применимости. Компьютерный мир предоставляет нам очень поучительный урок. Мир ОС UNIX, содержащий максимально совместимые решения, вынужден сейчас развиваться в сторону DOS, несмотря на неоспоримое техническое превосходство. Даже во время второго раунда, когда UNIX все еще мог предложить большие возможности, нежели Windows NT, последний был более популярен. Мир PC страдает от многочисленных ошибок несовместимости, добиваясь жизнеспособности. 98% компаний, ориентированных на PC выходят из бизнеса, поскольку их продукты вызывают слишком много побочных эффектов для других приложений.
Пользователи, купившие свои PC, мучаются каждый день от необъяснимых аномалий операционной системы. Разработчики программного и аппаратного обеспечения PC хорошо помнят кошмары тестирования системного уровня своего продукта на совместимость с огромным числом других программ. В мире множественных реализаций любого сложного стандарта (операционная система, сетевой протокол) немного решений проходят проверку временем с точки зрения Plug&Play совместимости. Понятие правильной реализации теста обречено быть ограниченным в своей практической годности, поскольку реальные тесты всегда не полны, и не дают полной верификации. Более того, все реализации, точные или нет, являются предметом для личных интерпретаций.
| Функция системы |
Реализация архитектуры/протокола |
| Качественный стек протоколов |
Единая реализация для всех применений или строгий набор тестов, исключающий несоответствие спецификации. |
| Постоянное поведение уровня приложения |
Стандартные интерфейсы уровня, сформулированные в терминах объектов приложений и параметров конфигурации. |
| Инструменты для проведения верификации системного уровня функций, выполняемых проектируемой системой. |
Инструменты, решающие все проблемы системного дизайна в интегрировано – разработка узлов, спецификация и верификация соединений, анализ сетевого трафика. |
| Инструменты, позволяющие “прозрачное” превращение системы разработки в готовую рабочую систему. |
Качественная системная архитектура. “Лабораторный” и “полевой” инструментарий, который качественен по своей архитектуре. |
Таблица 1.4.
- Установка системы, эксплуатация и диагностика.
Возможно, одним из наиболее неоспоримых и легко понимаемых из вышеперечисленных факторов, является соотношение цены к длине проложенной линии. Прокладывать кабель по существующим коммуникациям может стоить несколько долларов за метр, в то время как раскапывать прилегающий к историческому зданию двор, оживленный перекресток или завод без остановки выпуска продукции – гораздо дороже. Стоимость установки системы может достигать 80% от стоимости контракта. Поэтому вопрос возможности выбора правильной среды передачи очень важен. Основываясь на особенностях индустрии, таблица 1.6. классифицирует требования к среде передачи. Возможность разнородной среды передачи в одной и той же сети предпочтительна для всех видов промышленности, поскольку позволяет провести глобальную оптимизацию путем оптимального локального выбора. Легкость установки является основным фактором выбора среды передачи для любого применения. Однако, многие другие факторы также имеют серьезное влияние, среди них не восприимчивость к EMI, электрическая изоляция, компактность и другие.
| Функция системы |
Реализация архитектуры/протокола |
| Установка |
Поддержка нескольких возможных сред передачи для каждого приложения.
Гибкое разделение.
|
| Эксплуатация |
Легкость подключения/отключения устройств |
| Диагностика |
Удаленный доступ
Количество и тип информации, определяемые пользователем.
Сетевая диагностика, ошибки связи, причины ошибок, статистика устройств.
|
Таблица 1.5.
| Приложение |
Связь и конфигурация |
Промышленная
Автоматизация
|
Использование витой пары >20mA.
Свободная топология для подключения и изменений.
Длина провода до 2000 м без репитера.
Высокая EMI надежность.
|
Автоматизация
Зданий
|
Оптоволокно для крупных линий.
Использование ИБП.
Малая стоимость установки простого кабеля, свободная топология, Малая стоимость и размеры репитеров.
Изоляция от случайного заземления.
|
Тип
Связи
|
Оптоволокно в для неблагоприятных условий.
RF для мобильных систем, связанных со стационарными.
Стандартный кабель витая пара.
|
Домашняя
Автоматизация
|
Использование RF и витой пары.
Свободная топология.
|
Таблица 1.6.
- Стоимость эксплуатации и окупаемость.
В среднем по промышленным предприятиям необходимый срок окупаемости нового оборудования снижается. Период переоснастки производственных линий фабрик снизился с 6-10 лет до 3-4 лет. В полупроводниковом производстве линии обновляются каждые 2-3 года. Ресурс вагонеток составляет 5-10 лет. Системы автоматизации зданий могут служить больше, но нуждаются в периодических доработках и модификациях.
| Задачи, решаемые системой |
Применяемое решение |
| Приобретение |
· Большое количество специализированных СБИС, других компонентов и встраиваемых блоков.
· Доступность консультационных служб и сервисов.
· Недорогое конструктивное исполнение.
|
| Дизайн, разработка и интеграция |
· Интегрированный инструментарий системного дизайна, позволяющий упростить разработку, обеспечивающий безошибочное функциональное взаимодействие и короткий срок внедрения.
· Архитектура в стиле “Дизайн для совместимости”, средства разработки и верификации готовых блоков на совместимость.
· Легко подключаемые встраиваемые блоки, такие как API и другие продукты широкого профиля.
· Легкость интеграции в существующую инфраструктуру, само перестраивающиеся продукты.
|
| Эксплуатация |
· Совместимость
· Инструментарий для сопровождения, использующий системную базу данных, совместимую с лабораторной средой разработки.
· Поддержка архитектурой гибкой удаленной отладки, легкое удаление/перепрограммирование и замена.
· Гибкое быстрое обновление и переконфигурация.
· Выделенный диапазон в адресном пространстве, выбор среды передачи и так далее, таким образом, что система не устаревала длительное время.
|
Таблица 1.7.
1.6
Системная архитектура
В дополнение к анализу системных аспектов влияющих на особенности управляющих сетей, приведенному выше, давайте также рассмотрим другой важный пункт, который имеет сильное влияние на эти особенности – историю и тенденции развития архитектуры управляющих сетей.
Модели многих компьютерных систем прошлого были иерархическими и состояли из нескольких уровней. IBM-овский SNA и DEC-овский DNA, во времена их расцвета, показали здоровый спектр мэйнфреймов а также больших и малых миниЭВМ, использующих многоуровневую архитектуру с большим количеством вспомогательных персональных компьютеров на низших уровнях. Конечно, разница между таким взглядом и сегодняшней реальностью достаточно очевидна. Современные системы состоят из сети распределенных систем клиент\сервер, связанных посредством маршрутизаторов, мостов и шлюзов. Многие клиентские компьютеры и сервера обладают одинаковой производительностью, лишь небольшое количество их более мощные нежели остальные, включая многочисленные рабочие станции, редкие миниЭВМ и почти вымершие мэйнфреймы.
Устаревшая архитектурная модель состоит из пяти уровней (рис 6). Не смотря на то, что мир контрольных сетей не является настолько продвинутым, как компьютерный, его развитие в этом направлении неизбежно, благодаря преимуществам этой технологии для конечных пользователей. Децентрализация компьютерных систем приносит колоссальные вычислительные мощности туда, где при централизованной системе это было просто невозможно. Распределенное управление, аналогично, позволяет расширить круг управления. Распределенные системы контроля одноуровневой архитектуры установлены в офисных зданиях, жилых домах, гостиницах, на транспорте и др. Индустриальные системы контроля, загроможденные своим установленным оборудованием, задержались на старте, но теперь набирают скорость и развиваются в том же направлении. Системы управления одноуровневой архитектуры работают в газовых хранилищах, очистных сооружениях, заводах, металлургических комбинатах, автоматических производственных линиях, нефтепроводах и др. Микро PLC (Programmable Logical Controller) и сетевые микро PLC наиболее перспективное направление на рынке дискретного управления.
Рисунки 1.3., 1.4. и 1.5. показывают возможные стадии развития системной архитектуры от иерархической к одноуровневой.
Система, показанная на рисунке 1.3. похожа на большинство промышленных систем. На заводе каждая ячейка может состоять из множества подсистем, выполняющих управление различными функциями передвижения, монтажа, штамповки и другими действиями. Продукт передвигается от ячейки к ячейке по конвейерной линии в течение монтажного процесса. Каждая ячейка может быть оснащена PLC, встроенным PC, индустриальными компьютерами и т.д., управляющими неинтеллектуальными сенсорами и вводом/выводом. Традиционные системы автоматизации зданий и других систем могут быть сегментированы подобным образом.
Рисунок 1.4. показывает систему промежуточной архитектуры, состоящую из нескольких неинтеллектуальных сенсоров (S) и приводов (A), управляемых центральным контроллером, связанным с распределенными подсистемами, использующими интеллектуальные сенсоры (IS) и приводы (IA). Эти интеллектуальные сенсоры передают контрольные сигналы через одноуровневые соединения.
Рисунок 1.5. состоит только из интеллектуальных сенсоров и приводов. Распределенная система логически сегментирована по функциям для обеспечения модульной реализации. Сегментация с использованием маршрутизаторов локализует передачу информации для избежания ненужных взаимодействий устройств, позволяя ячейкам общаться между собой.
Такая распределенная система работает корректно при условии:
- достаточного адресного пространства;
- наличия логической сегментации системы, реализуемой посредством адресации и фильтрации трафика;
- производительность компьютеров, скорость обмена данными и размер пакета масштабируемы для каждого узла в зависимости от решаемой задачи управления.

Рисунок 1.3. Традиционная иерархическая система.
Рисунок 1.4. Переходная система с иерархическими и равноправными элементами.

Рисунок 1.5. Распределенная система одноуровневой архитектуры.
| Уровень OSI/ISO |
Цель |
Важные Особенности |
Выгода |
| 1 |
2 |
3 |
4 |
5 |
| 7 |
Прикладной уровень |
Совместимость приложения, сенсора/привода |
1. Высокоуровневые определения объектов интерфейса.
2. Стандартные конфигурируемые параметры.
|
1. Представление любого сенсора/привода или интерфейса контроллера как совокупности объектов высокого уровня.
2. Совместимость со стандартными интерфейсами сенсоров.
|
| 6 |
Уровень представления данных |
Интерпретация данных |
Стандартные типы данных. |
Возможность обмениваться и интерпретировать стандартные данные вне зависимости от приложения. |
| 5 |
Сеансовый уровень |
Удаленные действия |
1. Запрос/Ответ.
2. Аутентификация.
|
1. Надежность для обеспечения подтверждения действия и подлинности отправителя.
|
| 4 |
Транспортный уровень |
Надежность передачи |
1. Передача сообщений без подтверждения с/без повторов.
2. Передача с подтверждениями.
3. Множественные сообщения с/без подтверждения от каждого узла по выбору.
4. Обнаружение повторов.
|
1. Оптимальная связь с большим числом устройств и с устройствами, не подтверждающими прием. Улучшение надежности работы сети.
2. Надежная доставка сообщений.
3. Производительность и надежность.
4. Устранение лишних повторных сообщений, пришедших окольным путем, что возможно вследствие свободной топологии.
|
| 3 |
Сетевой уровень |
1. Маршрутизация, адресация |
1. Поддержка маршрутизаторов. |
1. Размер и взаимосвязь-поддержка больших сетей.
2. Надежность-фильтрация сообщений, сегментация сети на логические ячейки с возможностью их связи.
3. Легкость установки и надежность, благодаря поддержке различных типов связи.
4. Надежность связи – создание дополнительных связей между узлами, пользуясь правилом свободной топологии.
|
| 2 |
Уровень линии передачи данных |
Доступ к среде передачи и кадрирование. |
Демократическая схема доступа к среде передачи + система приоритетов. |
1. Короткий период ожидания для важных узлов и демократический доступ для всех остальных.
2. Поддержка передачи дискретной и аналоговой, так же как конфигурационной и диагностической информации без потери производительности.
|
| 1 |
Физический уровень |
Электрическое соединение. |
Поддержка различных сред передачи. |
1. Установка.
2. Производительность.
3. Надежность.
|
Таблица 1.8.
1.7
Обзор протоколов передачи
Таблица 1.8. содержит информацию о важных сервисных протоколах для шины сенсоров/приводов, полученных в ходе дискуссии на тему системных требований. Для классификации используется семиуровневая модель OSI/ISO.
Семиуровневая модель OSI./ISO
1. Физический уровень - фактическая передача битов по передающей среде, связан с аппаратурой - разъемами, сетевыми платами.
2. Уровень линии передачи данных - обеспечивает связь с фактическим потоком битов на физическом уровне, осуществляет сборку и разборку потока битов на кадры.
3. Сетевой уровень - определяет фактический путь данных между узлами сети, обеспечивает адресацию и маршрутизацию пакетов.
4. Транспортный уровень - организует связь сетевого и сеансового уровня, выполняет сборку и разборку сегментов передачи.
5. Сеансовый уровень-управление сеансом главного компьютера.
6. Уровень представления данных - кодировка и декодировка фактических данных.
7. Прикладной уровень-организация взаимодействия с пользователем.
1.8
Обзор возможных решений
Соглашение о терминологии. Один из факторов, скрывающих тот факт, что обычные платформы могут работать в различных областях производства является вавилонской башней имен этих сетей. Термины “fieldbus”, сеть сенсоров/приводов, сенсорная сеть, управляющая сеть, существовали и раньше, а термин “приборная сеть” появился недавно.
В чем отличие “fieldbus” от управляющей сети (control network)? “Field” инструментарий является более совершенным средством, чем аналоговые сенсоры или составные сенсоры, так же как рабочие станции более совершенны, чем персональные компьютеры. Следует заметить, что на каждый “field instrument” (полевой инструмент) приходится порядка 10 датчиков. Таким образом, для подключения этих устройств к общей сети в стиле “control network”, необходимо использовать “fieldbus”. Если мы используем разнородные устройства, то необходимо использовать разнородные способы подключения. Общая шина, обеспечивающая потребности “field instruments” (полевых инструментов) в вычислительных ресурсах и данных, а также потребности недорогих датчиков, решает обе проблемы.
Приборная сеть определяется как сеть, которая в первую очередь включает в себя дискретные сенсоры. Таким образом, промышленные клиенты сталкиваются с тремя названиями: “fieldbus”, управляющая сеть и приборная сеть.
В независимости от названий, производственные группы работают над выработкой стандарта для шины, соединяющей сенсоры и приводы в промышленной автоматизации, автоматизации зданий, на транспорте и в медицинских системах. В некоторых случаях еще остались группы, занимающиеся удовлетворением требований подсистем в этих областях. Например, в области автоматизации зданий специалисты ASHRAE недавно занялись проблемами управления освещением, пожарной сигнализации, контроля доступа, начав с нужд систем кондиционирования и вентиляции. Прилагаются усилия для выработки решений в области транспортных систем, в том числе метро, железных дорог, локомотивов, сигнальных систем, самолетов, кораблей, подводных лодок, машин, автобусов и грузовиков.
Подобная независимая инициатива была проявлена в Интеллектуальных Авто Дорожных Системах (IVHS) для автоматизации сбора оплаты, создания интеллектуальных перекрестков и других, более футуристических интеллектуальных систем управления движением, таких как караваны машин с автоматическим управлением. Все эти проекты связаны с одними конечными устройствами - сенсорами и приводами. С точки зрения связи приложений, конфигурирования и диагностики, существует несколько сходных и различных требований. Уникальные требования могут быть удовлетворены различными дополнениями к основной технологии.
Понятно, что сначала промышленность выиграет от определения основной марки: сеть сенсоров или управляющая сеть. Термин управляющая сеть предпочтительнее, чем сеть сенсоров, т.к. сенсоры и приводы есть в обеих сетях, и контрольные функции могут осуществляться централизованной управляющей системой или распределенной управляющей системой.
Если на практике требования окажутся однородными, то отпадет необходимость в использовании различной терминологии. В случае существования четких различий, наилучшим решением станет использование управляющей сети для автоматизации производства, зданий и заводов.
Некоторые варианты. Вопрос о необходимости определения единого протокола для управляющих сетей “Один Мир - Один Протокол” остается без ответа до настоящего времени. Основными доступными сейчас и в будущем вариантами являются:
- Решения, основанные на CAN, такие как CAN автоматизация, DeviceNet, J1850 и SDS;
- Шины простых сенсоров Seriplex и Bitbus;
- Технология LonWorks;
- CEBus;
- BACnet;
- Инструментальные шины IEEE488;
- Производственные решения MAP и ARCnet;
- Решения для производственных процессов Profi-Bus и Fieldbus Foundation;
- Другие промышленные шины Opto-22, Interbus-S и др.
Естественно существуют и другие схемы, предназначенные для решения специфических задач. Компании, разработчики протоколов, не предполагали продавать их третьим организациям, а планировали использовать их в своей работе.
1.9
Стандартизация контрольных сетей
Взгляд вперед. Важно определить направление развития контрольных сетей, т.е. какими должны стать сенсоры, инструменты для установки, диагностики и ремонта. Существует несколько подходов:
- Общая контрольная сеть с общими объектными моделями.
- Различные контрольные сети с общими объектными моделями.
- Общие контрольные сети с различными объектными моделями.
- Различные контрольные сети с различными объектными моделями.
Необходимо выработать единый протокол передачи (Один мир - один протокол). Общая контрольная сеть обеспечивает совместимость на уровне сети. Общие объектные модели определяют поведение на уровне приложений и совместимость. Такой подход будет выгоден производителям, т.к. можно будет писать программы и строить оборудование, соотносясь только с одной моделью.
Второй подход предполагает производство различного оборудования для большого количества различных платформ контрольных сетей. Установщикам оборудования придется обеспечивать связь устройств посредством различных драйверов.
Таким образом, наилучшим вариантом будет получение общих определений объектов для работы с разными платформами.
- Каждый сенсор, разработанный для выполнения определенных функций, должен будет их выполнять вне зависимости от сетевой платформы, под которой он работает, и типа связи. Аналогично одинаковой работе Word и Excel под Windows или Macintosh System 7, вне зависимости от типа передачи данных через Ethernet/TP, Ethernet/Coax, NetWare, TCP/IP или при использовании другой схемы.
- Определение стандартного интерфейса должно упростить разработку программного обеспечения. Так же, как написание платформенно независимых приложений делает их разработку легче.
- Производители инструментария смогут использовать общий набор определений объектов в своей работе. API нижнего уровня, работающие с сетевыми сервисами, будут платформенно зависимыми для правильного взаимодействия с узлами, но приложения более высокого уровня будут независимыми, а их работа с объектами будет единообразной.
| Характеристики |
BACnet |
CAN-based
(SDS, DeviceNet
|
CEBus |
Fieldbus
(SP-50, Foundation Initiative.
|
LONWORKS |
| 1 |
2 |
3 |
4 |
5 |
6 |
| Область применения |
1.Автоматизация зданий |
2. Стандарт автоматизации (J1850,J1939)
3. Дискретная автоматизация (SDS, DeviceNet)
|
4.Автоматизация жилища |
5.Промышленные станки и приборы |
1.Автоматизация зданий.
2.Управление производством
3.Автоматизация предприятий
1.Транспорт
2.Автоматизация жилища
|
| Уровни OSI/ISO |
1,2,3,7 |
1,2,7 |
1,2,3,7 |
1,2,7 |
1,2,3,4,5,6,7 |
| Поддерживаемые среды передачи |
1. Витая пара.
2. Коаксиальный кабель.
3. Оптоволокно.
|
6. Витая пара (SDS, DeviceNet).
7.Альтернативные решения на основе оптоволокна для сетей CAN.
|
8. Силовые электрические линии (FCC)
9.Коаксиальный кабель
10.RF.
|
11.Витая пара H1, H2(1).
12.Коаксиальный кабель H2 (2.5).
13.Характерная безопасность передачи данных на скорости 31.25 Kbps и 1 Mbps.
|
14.Витая пара со свободной топологией с возможностью подачи питания.
15.Характерная безопасность витой пары.
16.Линии электропитания совместимые со стандартом FCC и CENELEC.
17.Оптоволокно.
18.Коаксиальный кабель.
19.RF (несколько диапазонов)
|
| Схема доступа к среде передачи |
20. CSMA/CD.
21. Master/slave, token passing.
22. Удаленный доступ через модем.
|
23. CSMA/CR |
24.CSMA/CD |
25.Предопределенный централизованный планировщик с возможностью делегирования токена. |
26.P-персистентный CSMA/CD.
27.Дополнительный CSMA/CR.
28.Возможность включения системы приоритетов.
|
| Скорость передачи данных |
29. 10 Mbps |
1. 1 Mbps(CAN)
2. 1 Mbps (SDS)
3. 500 Kbps (DeviceNet)
|
30. 6,666 kbps
(или 10 kbps)
|
1. 31,25 kbps для H1
2. 1 Mbps для H2 (1)
1. 2,5 Mbps для H2 (2.5)
|
31. До 1,25 Mbps. |
| Максимальное адресное пространство |
32. 248
|
33. 27
=128 (SDS)
34. 26
=64 (DeviceNet)
211
(CAN 1)
229
(CAN 2)
|
35. 216
|
36. 127
37.логических узлов в сегменте, 64 сегмента.
|
38. 248
доменов, 32000 узлов в домене. |
| Поддержка маршрутизаторов сетевого уровня |
39. Есть |
40. Нет |
41. B-маршрутизаторы. |
42. Есть. Поддержка различных скоростей маршрутизации. |
43.Самообучающиеся или конфигурируемые маршрутизаторы.
44. Хорошая реализация как физических, так и логических репитеров.
45. Полная поддержка средствами инсталляции.
|
Безопасность
(аутентификация).
|
46. Есть |
47. Нет |
48.На уровне приложения
(ограничения сопряжимости)
|
49. Нет |
50. Есть |
| Поддержка совместимости сетей. |
51. Определены объекты высокого уровня.
52. Службы управления сетью не определены.
|
53. Определены объекты высокого уровня (SDS, DeviceNet).
54. Служба управления сетью определена (SDS, DeviceNet).
55.Несуществует реализации теста на совместимость с DeviceNet.
56.Cертификационный план определен для SDS и определяется для DeviceNet.
|
57.Определены высокоуровневые функции.
58.Служба управления сетью не определена.
59.Не существует теста на совместимость.
60.Сертификационный план до сих пор не определен.
|
61. 10 функциональных блоков определено, еще 20 определяется62.Поддерживается соответствие с применяемым стеком протоколов.
63.Сертификационный план до сих пор не определен.
|
64.Определены объекты высокого уровня и стандартные конфигурируемые параметры.
65.Определена и реализована служба управления сетью.
66.Тест на совместимость определен.
1.Сертификационная программа определена.
|
| Степень готовности. |
67.Спецификационный материал находится на конечной стадии разработки чернового варианта. |
68.Спецификация DeviceNet часть 1 опубликована, часть 2 готовиться.
1.Спецификация SDS опубликована.
|
69.Документы по CAN доступны.
70.Спецификация по 'Interim’ утверждена.
71.Трансиверы для сетей электропитания, системы разработки и некоторые другие продукты доступны.
|
72.Документы + стек протоколов Q3’95.
73.Документы по доступу к среде передачи и физическому интерфейсу:
74.H1-сейчас,
75.H2-Q3’95.
76.В соответствии с реализацией тестов на совместимость Q3’95.
|
77.Доступны спецификации для всех протоколов, служб и системных интерфейсов.
78.Документы доступны со времени выхода Q3’91.
79.Доступно более 200 готовых блоков.
1.Доступны средства разработки.
|
Таблица 1.9 Разнообразие контрольных сетей, разработанных для широкого и специализированного применения.
1.10
1.11
Роль стандартизационных организаций
Комиссии по стандартизации работают эффективней, когда сосредотачивают свои усилия на определении минимальных потребностей для стимуляции индустриального роста. Не всегда комиссии по стандартизации могут определить все аспекты работы контрольных сетей, т.е. протоколы, системную архитектуру, кабели и коннекторы, процессоры и сегменты кодов. Более восьми лет комиссии, занимавшиеся работой с BACnet, SP-50 и CEBus провели в изучении этих стандартов. И, тем не менее, ни один не был признан лучшим во всех отношениях.
Необходимо учесть, что определение единого стандарта и соответствия влечет за собой серьезную ответственность. Любое решение, которое должно обеспечить правильное взаимодействие сетей, будет обречено на провал, если не сможет гарантировать правильную работу любых вариантов и реализаций. Кроме технических трудностей в деловой среде существуют дополнительные аспекты, необходимые для правильного взаимодействия нескольких организаций. Даже эта проблема может лишить решение права на успех.
Также нельзя думать, что выбор стандарта-лидера в настоящее время будет правильным, потому, что нельзя точно определить лидера в самом начале гонки, особенно если многие участники соревнований еще не стартовали. Неправильный выбор может отбросить целые индустрии назад на несколько лет.
Таким образом, усилия таких стандартизационных организаций как IEEE/NIST, должны быть направлены на достижение двух целей:
1. Определение совместимости на уровне приложений через определение общих объектов, что позволит облегчить разработку программного обеспечения для сенсоров и MMI.
2. Определить 3-4 наилучших альтернативы и позволить рынку выбирать среди них в зависимости от важности конкретных критериев.
Рисунок 1.6.
Рисунок 1.7.
Принцип нескольких альтернативных протоколов подобен существующему и успешно применяемому набору стандартов IEC802.xx, включающий в себя такие протоколы как IEC802.1 (стандарт на коаксиальный Ethernet), IEC802.11 и др. На рис. 1.6. и 1.7. различные Options соответствуют различным особенностям сред передачи и LAN протоколов.
Требования к шине сенсоров и приводов должны рассматриваться с точки зрения системы и жизненного цикла. Важными системными требованиями являются: размер системы, взаимосвязанность, надежность, гибкость, производительность, интеграция, эксплуатация, диагностика и цена. Важные требования к шине сенсоров и приводов, следующие из системных требований, включают поддержку различных устройств и типов связи, гибкую поддержку пакетов различного размера, большое адресное пространство, одноуровневые связь и контроль.
Разработчики современных систем склоняются к распределенным системам одноуровневой архитектуры. Сетевые микро PLC считаются наиболее перспективными для внедрения в промышленные системы контроля и являются следующим шагом развития.
Важной задачей является определение общих принципов построения управляющих сетей для различных приложений и сегментов рынка. Организации по стандартизации должны определить стандартные объекты уровня приложений для повышения совместимости. Подобные организации могут быть полезны для определения 3-4 наилучших альтернатив, позволяя производителям и разработчикам аппаратного и программного обеспечения, системным интеграторам и конечным пользователям выбирать самим.
2.
Описание стандарта RS-485
2.1
Универсальный асинхронный приемопередатчик (UART)
Возможно, связь через асинхронный последовательный порт уходит в прошлое, однако сложно найти контроллер, не имеющего в составе своей периферии UART. Поэтому хоронить его, думаю, рановато. Раз так, то будет нелишним сказать пару слов о том, как оно работает. Описание конкретной реализации последовательного порта есть в datasheet на каждый контроллер, поэтому опишу общее для всех.
UART можно разделить на приемник (Receiver) и передатчик (Transmitter). В состав UART входят: тактовый генератор связи (бодрейт-генератор), управляющие регистры, статусные регистры, буферы и сдвиговые регистры приемника и передатчика. Бодрейт-генератор задает тактовую частоту приемопередатчика для данной скорости связи.
Управляющие регистры задают режим работы последовательного порта и его прерываний. В статусном регистре устанавливаются флаги по различным событиям. В буфер приемника попадает принятый символ, в буфер передатчика помещают передаваемый. Сдвиговый регистр передатчика - это обойма, из которой в последовательный порт выстреливаются биты передаваемого символа (кадра). Сдвиговый регистр приемника по биту накапливает принимаемые из порта биты. По различным событиям устанавливаются флаги и генерируются прерывания (завершение приема/отправки кадра, освобождение буфера, различные ошибки).
UART - полнодуплексный интерфейс, то есть приемник и передатчик могут работать одновременно, независимо друг от друга. За каждым из них закреплен порт - одна ножка контроллера. Порт приемника обозначают RX, передатчика - TX. Последовательной установкой уровней на этих портах относительно общего провода ("земли") и передается информация. По умолчанию передатчик устанавливает на линии единичный уровень.
Передача начинается посылкой бита с нулевым уровнем (старт-бита), затем идут биты данных младшим битом вперед (низкий уровень - "0", высокий уровень - "1"), завершается посылка передачей одного или двух битов с единичным уровнем (стоп-битов).
Электрический сигнал кадра посылки показан на рисунке 2.1.:

Рисунок 2.1. Электрический сигнал кадра посылки.
Перед началом связи между двумя устройствами необходимо настроить их приемопередатчики на одинаковую скорость связи и формат кадра.
Скорость связи или бодрейт (baudrate) измеряется в бодах - число передаваемых бит в секунду (включая старт и стоп-биты). Задается эта скорость в бодрейт-генераторе делением системной частоты на задаваемый коэффициент. Типичный диапазон скоростей: 2400 … 115200 бод.
Формат кадра определяет число стоп-битов (1 или 2), число бит данных (8 или 9), а также назначение девятого бита данных. Все это зависит от типа контроллера.
Приемник и передатчик тактируются, как правило, с 16-кратной частотой относительно бодрейта. Это нужно для сэмплирования сигнала. Приемник, поймав падающий фронт старт-бита, отсчитывает несколько тактов и следующие три такта считывает (семплирует) порт RX, рисунок 2.2. Это как раз середина старт-бита. Если большинство значений семплов - "0", старт-бит считается состоявшимся, иначе приемник принимает его за шум и ждет следующего падающего фронта. После удачного определения старт-бита, приемник точно также семплирует серединки битов данных и по большинству семплов считает бит "0" или "1", записывая их в сдвиговый регистр. Стоп-биты тоже семплируются, и если уровень стоп-бита не "1" - UART определяет ошибку кадра и устанавливает соответствующий флаг в управляющем регистре.

Рис.2.2. Семплирование.
Поскольку бодрейт устанавливается делением системной частоты, при переносе программы на устройство с другим кварцевым резонатором, необходимо изменить соответствующие настройки UART.
2.2
Интерфейс RS-485
Интерфейс RS-485 (другое название - EIA/TIA-485) - один из наиболее распространенных стандартов физического уровня связи. Физический уровень - это канал связи и способ передачи сигнала (1 уровень модели взаимосвязи открытых систем OSI).
Сеть, построенная на интерфейсе RS-485, представляет собой приемопередатчики, соединенные при помощи витой пары - двух скрученных проводов. В основе интерфейса RS-485 лежит принцип дифференциальной (балансной) передачи данных. Суть его заключается в передаче одного сигнала по двум проводам. Причем по одному проводу (условно A) идет оригинальный сигнал, а по другому (условно B) - его инверсная копия. Другими словами, если на одном проводе "1", то на другом "0" и наоборот. Таким образом, между двумя проводами витой пары всегда есть разность потенциалов: при "1" она положительна, при "0" - отрицательна.

Рис.2.3. дифференциальная передача данных
Именно этой разностью потенциалов и передается сигнал. Такой способ передачи обеспечивает высокую устойчивость к синфазной помехе. Синфазной называют помеху, действующую на оба провода линии одинаково. К примеру, электромагнитная волна, проходя через участок линии связи, наводит в обоих проводах потенциал. Если сигнал передается потенциалом в одном проводе относительно общего, как в RS-232, то наводка на этот провод может исказить сигнал относительно хорошо поглощающего наводки общего ("земли"). Кроме того, на сопротивлении длинного общего провода будет падать разность потенциалов земель - дополнительный источник искажений. А при дифференциальной передаче искажения не происходит. В самом деле, если два провода пролегают близко друг к другу, да еще перевиты, то наводка на оба провода одинакова.
Потенциал в обоих одинаково нагруженных проводах изменяется одинаково, при этом информативная разность потенциалов остается без изменений.
Аппаратная реализация интерфейса - микросхемы приемопередатчиков с дифференциальными входами/выходами (к линии) и цифровыми портами (к портам UART контроллера), рисунок 2.4. Существуют два варианта такого интерфейса: RS-422 и RS-485.
- RS-422 - полнодуплексный интерфейс. Прием и передача идут по двум отдельным парам проводов. На каждой паре проводов может быть только по одному передатчику.
- RS-485 - полудуплексный интерфейс. Прием и передача идут по одной паре проводов с разделением по времени. В сети может быть много передатчиков, так как они могут отключаются в режиме приема.

Рис.2.4. Аппаратная реализация интерфейса.
D (driver) - передатчик;
R (receiver) - приемник;
DI (driver input) - цифровой вход передатчика;
RO (receiver output) - цифровой выход приемника;
DE (driver enable) - разрешение работы передатчика;
RE (receiver enable) - разрешение работы приемника;
A - прямой дифференциальный вход/выход;
B - инверсный дифференциальный вход/выход;
Y - прямой дифференциальный выход (RS-422);
Z - инверсный дифференциальный выход (RS-422).
Остановлюсь поподробнее на приемопередатчике RS-485, рисунок 2.5. Цифровой выход приемника (RO) подключается к порту приемника UART (RX). Цифровой вход передатчика (DI) к порту передатчика UART (TX). Поскольку на дифференциальной стороне приемник и передатчик соединены, то во время приема нужно отключать передатчик, а во время передачи - приемник. Для этого служат управляющие входы - разрешение приемника (RE) и разрешения передатчика (DE). Так как вход RE инверсный, то его можно соединить с DE и переключать приемник и передатчик одним сигналом с любого порта контроллера. При уровне "0" - работа на прием, при "1" - на передачу.

Рис. 2.5. Приемопередатчик RS-485.
Приемник, получая на дифференциальных входах (AB) разность потенциалов (UAB) переводит их в цифровой сигнал на выходе RO. Чувствительность приемника может быть разной, но гарантированный пороговый диапазон распознавания сигнала производители микросхем приемопередатчиков пишут в документации. Обычно эти пороги составляют ± 200 мВ. То есть, когда UAB > +200 мВ - приемник определяет "1", когда UAB < -200 мВ - приемник определяет "0". Если разность потенциалов в линии настолько мала, что не выходит за пороговые значения - правильное распознавание сигнала не гарантируется. Кроме того, в линии могут быть и не синфазные помехи, которые исказят столь слабый сигнал.
Все устройства подключаются к одной витой паре одинаково: прямые выходы (A) к одному проводу, инверсные (B) - к другому.
Входное сопротивление приемника со стороны линии (RAB) обычно составляет 12 КОм. Так как мощность передатчика не беспредельна, это создает ограничение на количество приемников, подключенных к линии.
Согласно спецификации RS-485 c учетом согласующих резисторов передатчик может вести до 32 приемников. Однако есть ряд микросхем с повышенным входным сопротивлением, что позволяет подключить к линии значительно больше 32 устройств.
Максимальная скорость связи по спецификации RS-485 может достигать 10 Мбод/сек. Максимальное расстояние - 1200 м. Если необходимо организовать связь на расстоянии большем 1200 м или подключить больше устройств, чем допускает нагрузочная способность передатчика - применяют специальные повторители (репитеры).
| Стандартные параметры интерфейсов |
RS-422 |
RS-485 |
| Допустимое число передатчиков / приемников |
1 / 10 |
32 / 32 |
| Максимальная длина кабеля |
1200 м |
1200 м |
| Максимальная скорость связи |
10 Мбит/с |
10 Мбит/с |
| Диапазон напряжений "1" передатчика |
+2...+10 В |
+1.5...+6 В |
| Диапазон напряжений "0" передатчика |
-2...-10 В |
-1.5...-6 В |
| Диапазон синфазного напряжения передатчика |
-3...+3 В |
-1...+3 В |
| Допустимый диапазон напряжений приемника |
-7...+7 В |
-7...+12 В |
| Пороговый диапазон чувствительности приемника |
±200 мВ |
±200 мВ |
| Максимальный ток короткого замыкания драйвера |
150 мА |
250 мА |
| Допустимое сопротивление нагрузки передатчика |
100 Ом |
54 Ом |
| Входное сопротивление приемника |
4 кОм |
12 кОм |
| Максимальное время нарастания сигнала передатчика |
10% бита |
30% бита |
Таблица 2.1. Сравнение RS-422 и RS-485
2.3
Согласование и конфигурация линии связи
При больших расстояниях между устройствами, связанными по витой паре и высоких скоростях передачи начинают проявляться так называемые эффекты длинных линий. Причина этому - конечность скорости распространения электромагнитных волн в проводниках. Скорость эта существенно меньше скорости света в вакууме и составляет немногим больше 200 мм/нс. Электрический сигнал имеет также свойство отражаться от открытых концов линии передачи и ее ответвлений. Грубая аналогия - желоб, наполненный водой. Волна, созданная в одном конце, идет по желобу и, отразившись от стенки в конце, идет обратно, отражается опять и так далее, пока не затухнет. Для коротких линий и малых скоростей передачи этот процесс происходит так быстро, что остается незамеченным. Однако, время реакции приемников - десятки/сотни нс. В таком масштабе времени несколько десятков метров электрический сигнал проходит отнюдь не мгновенно. И если расстояние достаточно большое, фронт сигнала, отразившийся в конце линии и вернувшийся обратно, может исказить текущий или следующий сигнал. В таких случаях нужно каким-то образом подавлять эффект отражения.
У любой линии связи есть такой параметр, как волновое сопротивление Zв. Оно зависит от характеристик используемого кабеля, но не от длины. Для обычно применяемых в линиях связи витых пар Zв=120 Ом. Оказывается, что если на удаленном конце линии, между проводниками витой пары включить резистор с номиналом равным волновому сопротивлению линии, то электромагнитная волна дошедшая до "тупика" поглощается на таком резисторе. Отсюда его названия - согласующий резистор или "терминатор".
Большой минус согласования на резисторах - повышенное потребление тока от передатчика, ведь в линию включается низкоомная нагрузка. Поэтому рекомендуется включать передатчик только на время отправки посылки. Есть способы уменьшить потребление тока, включая последовательно с согласующим резистором конденсатор для развязки по постоянному току. Однако, такой способ имеет свои недостатки. Для коротких линий (несколько десятков метров) и низких скоростей (меньше 38400 бод) согласование можно вообще не делать.
Эффект отражения и необходимость правильного согласования накладывают ограничения на конфигурацию линии связи.
Линия связи должна представлять собой один кабель витой пары. К этому кабелю присоединяются все приемники и передатчики. Расстояние от линии до микросхем интерфейса RS-485 должно быть как можно короче, так как длинные ответвления вносят рассогласование и вызывают отражения.
В оба наиболее удаленных конца кабеля (Zв=120 Ом) включают согласующие резисторы Rt по 120 Ом (0.25 Вт), рисунок 2.6. Если в системе только один передатчик и он находится в конце линии, то достаточно одного согласующего резистора на противоположном конце линии.
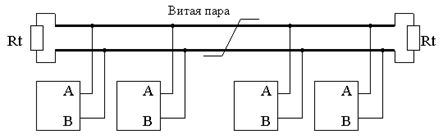
Рис. 2.6. Схема подключения согласующих резисторов.
2.4
Защитное смещение
Как уже упоминалось, приемники большинства микросхем RS-485 имеют пороговый диапазон распознавания сигнала на входах A-B - ±200мВ. Если |Uab| меньше порогового (около 0), то на выходе приемника RO могут быть произвольные логические уровни из-за несинфазной помехи. Такое может случиться либо при отсоединении приемника от линии, либо при отсутствии в линии активных передатчиков, когда никто не задает уровень.
Чтобы в этих ситуациях избежать выдачи ошибочных сигналов на приемник UART, необходимо на входах A-B гарантировать разность потенциалов Uab > +200мВ. Это смещение при отсутствии входных сигналов обеспечивает на выходе приемника логическую "1", поддерживая, таким образом, уровень стопового бита.
Добиться этого просто - прямой вход (А) следует подтянуть к питанию, а инверсный (B) - к "земле". Получается делитель, рисунок 2.7.:
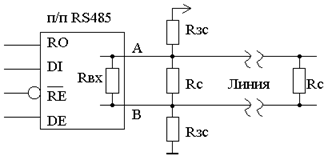
Рис. 2.7. Защита схемы от выдачи ошибочных сигналов.
Rвх - входное сопротивление приемника (обычно 12 кОм);
Rc - согласующие резисторы (120 Ом);
Rзс - резисторы защитного смещения.
Величины сопротивлений для резисторов защитного смещения (Rзс) нетрудно рассчитать по делителю. Необходимо обеспечить Uab > 200мВ. Напряжение питания - 5В. Сопротивление среднего плеча - 120Ом//120Ом//12КОм на каждый приемник - примерно 57 Ом (для 10 приемников). Таким образом, выходит примерно по 650 Ом на каждый из двух Rзс. Для смещения с запасом - сопротивление Rзс должно быть меньше 650 Ом. Традиционно ставят 560 Ом.
В расчете номинала Rзс учитывается нагрузка. Если на линии висит много приемников, то номинал Rзс дожен быть меньше. В длинных линиях передачи необходимо так же учитывать сопротивление витой пары, которое может "съедать" часть смещающей разности потенциалов для удаленных от места подтяжки устройств. Для длинной линии лучше ставить два комплекта подтягивающих резисторов в оба удаленных конца рядом с терминаторами.
Многие производители приемопередатчиков заявляют о функции безотказности (failsafe) своих изделий, заключающейся во встроенном смещении. Следует различать два вида такой защиты:
- Безотказность в открытых цепях. (Open circuit failsafe.)
В таких приемопередатчиках применяются встроенные подтягивающие резисторы. Эти резисторы, как правило, высокоомные, чтобы уменьшить потребление тока. Из-за этого необходимое смещение обеспечивается только для открытых (ненагруженных) дифференциальных входов. В самом деле, если приемник отключен от линии или она не нагружена, тогда в среднем плече делителя остается только большое входное сопротивление, на котором и падает необходимая разность потенциалов. Однако, если приемопередатчик нагрузить на линию с двумя согласующими резисторами по 120 Ом, то в среднем плече делителя оказывается меньше 60 Ом, на которых, по сравнению с высокоомными подтяжками, ничего существенного не падает. Поэтому, если в нагруженной линии нет активных передатчиков, то встроенные резисторы не обеспечивают достаточное смещение. В этом случае, остается необходимость устанавливать внешние резисторы защитного смещения, как это было описано выше.
- Истинная безотказность. (True failsafe.)
В этих устройствах смещены сами пороги распознавания сигнала. Например: -50 / -200 мВ вместо стандартных порогов ±200 мВ. То есть при Uab>-50мВ на выходе приемника RO будет логическая "1", а при Uab<-200 - на RO будет "0". Таким образом, и в разомкнутой и в пассивной линии при разности потенциалов Uab близкой к нулю, приемник выдаст "1". Для таких приемопередатчиков внешнее защитное смещение не требуется. Тем не менее, для лучшей помехозащищенности все-таки стоит дополнительно немного подтягивать линию.
Сразу виден минус внешнего защитного смещения - через делитель постоянно будет протекать ток, что может быть недопустимо в системах малого потребления. В таком случае можно сделать следующее:
а). Уменьшить потребление тока, увеличив сопротивления Rзс. Хотя производители приемопередатчиков и пишут о пороге распознавания в 200мВ, на практике вполне хватает 100мВ и даже меньше. Таким образом, можно сразу увеличить сопротивления Rзс раза в два-три. Помехозащищенность при этом несколько снижается, но во многих случаях это не критично.
б). Использовать true failsafe приемопередатчики со смещенными порогами распознавания. Например, у микросхем MAX3080 и MAX3471 пороги: -50мВ / -200мВ, что гарантирует единичный уровень на выходе приемника при отсутствии смещения (Uab=0). Тогда внешние резисторы защитного смещения можно убрать или значительно увеличить их сопротивление.
в). Не применять без необходимости согласование на резисторах. Если линия не будет нагружена на 2 по 120 Ом, то для обеспечения защитного смещения хватит подтяжек в несколько килоом в зависимости от числа приемников на линии.
Для опторазвязанной линии подтягивать следует к питанию и "земле" изолированной линии. Если не применяется опторазвязка, подтягивать можно к любому питанию, так как делитель создаст лишь небольшую разность потенциалов между линиями A и B. Нужно только помнить о возможной разности потенциалов между "землями" устройств, расположенных далеко друг от друга.
2.5
Исключение приема при передаче в полудуплексном режиме
При работе с полудуплексным интерфейсом RS-485 (прием и передача по одной паре проводов с разделением по времени) можно забыть, что UART контроллера - полнодуплексный, то есть принимает и передает независимо и одновременно.
Обычно во время работы приемопередатчика RS-485 на передачу, выход приемника RO переводится в третье состояние и ножка RX контроллера (приемник UART) "повисает в воздухе". В результате, во время передачи на приемнике UART вместо уровня стопового бита ("1") окажется неизвестно что, и любая помеха будет принята за входной сигнал. Поэтому нужно либо на время передачи отключать приемник UART (через управляющий регистр), либо подтягивать RX к единице, рисунок 2.8. У некоторых микроконтроллеров это можно сделать программно - активировать встроенные подтяжки портов.

Рис. 2.8.
Примечание: у микроконтроллера AT90S8535 (AVR Atmel) есть «глючок» - при отключенном UART он все равно принимает, и после включения на прием первый принятый байт может быть испорчен. Так что активировать подтяжку RX ему нужно обязательно.
2.6
"Горячее" подключение к линии связи
Спецификацией RS-485 не предусмотрено "горячее" подключение - включение новых приемопередатчиков в линию связи во время работы системы. Тем не менее, подобную операцию система переносит практически безболезненно, если учесть один нюанс. Это важно, когда питание на устройство подается в момент подключения, например, когда плата в виде кассеты вставляется в разъем. Дело в том, что во время любого сброса: по включению питания, по сигналу на входе "Reset", по срабатыванию сторожевого таймера - контроллеру требуется время на инициализацию, которое может составлять до нескольких десятков миллисекунд. Пока контроллер находится в состоянии сброса, он принудительно настраивает все порты на вход. Получается ситуация, при которой питание на микросхему приемопередатчика RS-485 уже подано, но входы разрешения приемника /RE и передатчика DE "висят в воздухе". В результате, приемопередатчик может по помехе открыться на передачу и все время пока микроконтроллер находиться в отключенном состоянии пускать в работающую линию мусор. Избежать этого легко - достаточно через резистор в несколько кОм подтянуть вход разрешения приемника /RE к нулю. Этим приемопередатчик сразу по включении питания настраивается на прием и не лезет на линию, рисунок 2.9.

Рис. 2.9.
2.7
Рекомендации по организации протокола связи
На физическом уровне линия связи готова к работе, однако, нужен еще и протокол - договоренность между устройствами системы о формате посылок.
По природе интерфейса RS-485 устройства не могут передавать одновременно - будет конфликт передатчиков. Следовательно, требуется распределить между устройствами право на передачу. Отсюда основное деление: централизованный (одномастерный) обмен и децентрализованный (многомастерный).
В централизованной сети одно устройство всегда ведущее (мастер). Оно генерирует запросы и команды остальным (ведомым) устройствам. Ведомые устройства могут передавать только по команде ведущего. Как правило, обмен между ведомыми идет только через ведущего, хотя для ускорения обмена можно организовать передачу данных от одного ведомого к другому по команде ведущего.
В децентрализованной сети роль ведущего может передаваться от устройству к устройству либо по некоторому алгоритму очередности, либо по команде текущего ведущего к следующему (передача маркера ведущего). При этом ведомое устройство может в своем ответе ведущему передать запрос на переход в режим ведущего и ожидать разрешения или запрета.
Последовательный канал по меркам контроллера - штука медленная. На скорости 9600 бод передача одного символа занимает больше миллисекунды. Поэтому, когда контроллер плотно загружен вычислениями и не должен их останавливать на время обмена по UART, нужно использовать прерывания по завершению приема и передачи символа. Можно выделить место в памяти для формирования посылки на передачу и сохранения принятой посылки (буфер посылки), а также указатели на позицию текущего символа.
Прерывания по завершению приема или передачи символа вызывают соответствующие подпрограммы, которые передают или сохраняют очередной символ со сдвигом указателя и проверкой признака конца сообщения, после чего возвращают управление основной программе до следующего прерывания. По завершению отправки или приема всей посылки либо формируется пользовательский флаг, отрабатываемый в основном цикле программы, либо сразу вызывается подпрограмма обработки сообщения.
В общем случае посылка по последовательному каналу состоит из управляющих байтов (синхронизация посылки, адресов отправителя и получателя, контрольной суммы и пр.) и собственно байтов данных.
Протоколов существует множество и можно придумать еще больше, но лучше пользоваться наиболее употребительными из них. Одним из стандартных протоколов последовательной передачи является MODBUS, его поддержку обеспечивают многие производители промышленных контроллеров. Но если Вам нужно буквально "два байта переслать" или просто освоить методы связи и не хочется из-за этого изучать систему команд модбаса и писать для него драйвер, предлагаю варианты относительно простых протоколов. (И все-таки в дальнейшем стоит ориентироваться именно на MODBUS.)
Основная задача в организации протокола - заставить все устройства различать управляющие байты и байты данных. К примеру, ведомое устройство, получая по линии поток байтов, должно понимать, где начало посылки, где конец и кому она адресована.
1). Часто встречаются протоколы на основе ASCII-кода. Управляющие символы и данные передаются в виде обыкновенных ASCII символов. Посылка может выглядеть так:
В HEX виде: 3Ah 31h 32h 52h 53h 34h 38h 35h 0Dh
В ASCII виде: ":" "1" "2" "R" "S" "4" "8" "5" /ПС/
В начале управляющий символ начала посылки ":", следующие две цифры - адрес получателя (12), затем символы данных (RS485) и в конце - управляющий символ конца посылки 0Dh (перевод строки). Все устройства на линии, приняв символ ":", начинают записывать в память посылку до символа конца строки 0Dh. Затем сравнивают адрес из посылки со своим адресом. Устройство с совпавшим адресом обрабатывает данные посылки, остальные - игнорируют посылку. Данные могут содержать любые символы, кроме управляющих (":", 0Dh).
Достоинство этого протокола в удобстве отладки системы и простоте синхронизации посылок. Можно через преобразователь RS485-RS232 подключить линию к COM-порту компьютера и в любой терминалке увидеть всю проходящую информацию "на человеческом языке". Недостатки - относительно большой размер посылки при передаче большого количества двоичной информации, ведь на передачу каждого байта нужно два ASCII символа (7Fh - "7", "F"). Кроме того, надо преобразовывать данные из двоичного вида в ASCII и обратно.
2). Можно организовать протокол с непосредственной передачей двоичных данных. При этом управляющие символы и байты данных различаются с помощью настройки дополнительного девятого бита в UART. Для управляющих символов этот бит устанавливается в "1". Первым в посылке передается управляющий символ с единичным девятым битом - остальные его "нормальные" биты могут содержать адрес устройства-получателя, признак начала/конца посылки и что-нибудь еще. Затем передаются байты данных с нулевым девятым битом. Все принимающие устройства узнают по девятому биту управляющий символ и по содержанию его остальных битов определяют, кому адресованы последующие данные. Адресуемое устройство принимает данные, а все остальные игнорируют их до следующего управляющего символа.
UART некоторых контроллеров, например C167 (Infineon) может в особом режиме (wakeup) автоматически распознавать в полученном байте девятый бит и генерировать прерывание при получении только управляющего символа. Адресуемое устройство при этом нужно переключить в режим обычного приема до следующего управляющего символа. Это позволяет остальным устройствам сэкономить время на обработке прерываний при получении байтов данных, адресованных не им.
Если требуется сопряжение системы и компьютера с Windows, такой протокол лучше не применять, так как у Windows могут быть проблемы с распознанием девятого бита в UART.
3). Протокол может быть "чисто" двоичным, то есть без выделения специальных управляющих символов. Синхронизация посылок в этом случае может осуществляться за счет отслеживания паузы между принятыми байтами. Принимающее устройство отсчитывает время с момента последнего приема байта до следующего, и если эта пауза оказывается больше какой-то величины (например, 1.5 - 3.5 байта), делается вывод о потере предыдущей посылки и начале новой. Даже если предыдущая посылка была незакончена - приемный буфер сбрасывается. Можно также синхронизировать посылки по уникальной стартовой последовательности байтов (по аналогии со стартовым символом в ASCII протоколе). В таких протоколах надо принимать особые меры для защиты от приема ложной посылки, начатой из-за помехи.
2.8
Программные методы борьбы со сбоями
Для повышения надежности связи обязательно нужно предусмотреть программные методы борьбы со сбоями. Их можно условно разделить на две группы: защита от рассинхронизации и контроль достоверности.
2.8.1 Защита от рассинхронизации
Несмотря на защитное смещение, сильная помеха может пробиться в линию без активных передатчиков и нарушить правильную последовательность приема посылок. Тогда возникает необходимость первой же нормальной посылкой вразумить принимающие устройства и не дать им принять помеху за посылку. Делается это с помощью синхронизации кадров (активная пауза) и синхронизации посылок (преамбула).
- Защита от рассинхронизации кадров.
Все последующие меры синхронизации посылок имеют смысл только совместно с этой, рисунок 2.10. Помеха ложным старт-битом может сбить правильный прием кадров последующей посылки. Чтобы вернуться к верной последовательности, нужно сделать паузу между включением приемопередатчика на передачу и посылкой данных. Все это время передатчик удерживает в линии высокий уровень, через который помехе трудно пробиться (активная пауза). Паузы длительностью в 1 кадр на данной скорости связи (10-11 бит) будет достаточно для того, чтобы любое устройство, принимавшее помехи приняло стоп-бит. Тогда следующий кадр будет приниматься с нормального старт-бита.

Рис. 2.10. Защита от синхронизации кадров.
Того же эффекта можно добиться передачей символа FFh перед первым байтом посылки, так как кроме старт-бита, все его биты - "1". (Если старт-бит символа FFh попадет на стоп-бит ложного кадра, будет просто засчитана ошибка кадра).
- Защита от рассинхронизации посылок.
Применяется совместно с предыдущей защитой! Особо подлая помеха может замаскироваться под управляющий символ и сбить принимаемую затем посылку. Кроме того предыдущая посылка может быть прервана. Из-за этого крайне желательно в подпрограмме приема и сохранения данных предусмотреть меры по опознанию настоящего начала посылки и сбросу приемного буфера посылки (области памяти, куда сохраняются принимаемые байты). Для этого служит преамбула - предварительный признак начала посылки.
Стартовый символ.
В ASCII протоколе роль преамбулы играет специальный управляющий символ начала посылки. По каждому приему такого символа нужно сбрасывать буфер: обнулять число принятых байт, перемещать указатель на начало буфера и т.п. То же самое нужно делать при переполнении буфера.
Это позволит настоящему управляющему символу сбросить предыдущую "посылку", начатую ложным символом.
Пример. Последний управляющий символ ":" сбросит предыдущую ложную посылку:
____:) ____: 1 2 R S 4 8 5 /ПС/
____
Стартовая пауза.
В двоичном протоколе, где не предусмотрен уникальный управляющий символ, и синхронизация посылок идет по заданной паузе между байтами, достаточно увеличить активную паузу, описанную в синхронизации кадров, до длительности паузы между байтами, по которой начинается прием новой посылки. То есть, между включением приемопередатчика на передачу и отправкой первых байтов посылки нужно сделать паузу длительностью в 1.5 - 3.5 кадра UART. При активном передатчике во время такой преамбулы помехе трудно будет прорваться к приемникам, они зафиксируют нужную паузу, сбросят буфер посылки и настроятся на прием новой посылки. Этот метод применяется, в частности, для протокола MODBUS RTU.
Стартовая последовательность.
Если в двоичном протоколе синхронизация осуществляется лишь по корректному началу посылки, то отфильтровать ложную посылку можно только по логике ее структуры. Преамбула в данном случае - некоторая стартовая последовательность символов, которая не может встретиться в данных посылки, и которую вряд ли сформирует помеха. Преамбула отсылается перед основной посылкой. Принимающее устройство отслеживает в поступающих данных эту стартовую последовательность. Где бы она не состоялась, принимающее устройство сбрасывает буфер посылки и начинает принимать новую.
Вариант 1.
Посылка начинает заново приниматься после приема "go!" (вместо символов могут быть любые 8-битные данные):
____: - Ь ___ g o! 1 2 R S 4 8 5
____
Вариант 2.
Посылка начинает заново приниматься после приема не менее
трех "E" подряд и стартового байта ":" (вместо символов могут быть любые 8-битные данные):
____ >: - E ___ E E E: 1 2 R S 4 8 5
____
Даже если до стартовой последовательности было два таких символа подряд, посылка начнет сохраняться только за последовательностью из не менее чем трех подряд (лишние игнорируются) и стартового символа. Если вместо "Е" использовать байт FFh - можно совместить синхронизацию кадров и посылок. Для этого посылаются четыре FFh, а принимающее устройство ожидает не менее трех, с учетом того, что первый байт FFh может уйти на синхронизацию кадров.
2.8.2 Контроль достоверности
Особо сильная помеха может вклиниться в посылку, исказить управляющие символы или данные в ней, а то и вовсе уничтожить ее. Кроме того, одно из подключенных к линии устройств (абонент) может выйти из строя и перестать отвечать на запросы. На случай такой беды существуют контрольная сумма, тайм-ауты и квитирование.
Контрольная сумма
- в общем случае 1-2 байта кода, полученного некоторым преобразованием из данных посылки. Самое простое - "исключающее или" всем байтам данных. Контрольная сумма рассчитывается и включается в посылку перед отправкой. Принимающее устройство производит ту же операцию над принятыми данными и сверяет рассчитанную контрольную сумму с полученной. Если посылка была повреждена, то, скорее всего, они не совпадут. В случае применения ASCII протокола - код контрольной суммы также передается ASCII-символами.
Тайм-аут
- максимальное время ожидания ответа от запрашиваемого устройства. Если посылка была повреждена или запрашиваемое устройство вышло из строя, то ведущее устройство не повиснет в ожидании ответа, а по истечении определенного времени признает наличие сбоя. После чего можно еще пару раз повторить запрос и, если сбой повторяется, перейти на отработку аварийной ситуации. Тайм-аут отсчитывается с момента завершения передачи запроса. Его длительность должна с небольшим запасом превышать максимальное время ответной передачи плюс время, необходимое на обработку запроса и формирование ответа. Ведомому устройству тоже не помешает отработка тайм-аутов. Особенно в ситуациях, когда отсутствие регулярного обновления данных или новых команд от ведущего устройства критично для работы устройств системы. Самая простая реализация для ведомого - сброс сторожевого таймера по приему посылки. Если по какой-либо причине данные перестали поступать - устройство сбросится по переполнению сторожевого таймера. После сброса устанавливается безопасный режим до приема первой команды.
Квитирование
- подтверждение доставки (квитанция). Когда важно, чтобы ведомый обязательно получил данные или команду, возникает необходимость проконтролировать получение им посылки. Ведущее устройство, отправив ведомому данные, ждет ответа с подтверждением. Ведомое устройство, получив данные, в случае их корректности посылает ответ, подтверждающий доставку. Если по истечении тайм-аута ведущее устройство не получает подтверждение, делается вывод о сбое в связи или в ведомом устройстве. Дальше обычные меры - повтор посылки. Но тут есть нюанс: повреждена и не получена может быть сама квитанция. Ведущее устройство, не получив квитанцию, повторяет посылку, и ведомое отрабатывает ее повторно. Не всегда это существенно, но если перепосылалась команда типа "увеличить параметр на 1" это может привести к незапланированному двойному увеличению параметра. В таком случае надо предусмотреть что-нибудь типа циклической нумерации посылок, чтобы ведомое устройство отличало повторные посылки от новых и не отрабатывало их.
2.9
Защита устройств от перенапряжений в линии связи
Разность потенциалов между проводниками линии и между линией и "землей" приемопередатчика, как правило, не должна выходить за пределы -7...+12 В. Следовательно, может потребоваться защита от разности потенциалов между "землями" и от перенапряжений из-за замыкания на высоковольтные цепи.
- Разность потенциалов между "землями".
При организации сети на основе интерфейса RS-485 следует учитывать неявное присутствие третьего проводника - "земли". Ведь все приемопередатчики имеют питание и "землю". Если устройства расположены недалеко от начального источника питания, то разность потенциалов между "землями" устройств в сети невелика. Но если устройства находятся далеко друг от друга и получают местное питание, то между их "землями" может оказаться существенная разность потенциалов. Возможные последствия - выход из строя приемопередатчика, а то и всего устройства. В таких случаях следует применять гальваническую развязку или дренажный провод.
Гальваническая развязка линии и устройств осуществляется либо опторазвязкой цифровых сигналов (RO, DI, RE, DE) с организацией изолированного питания микросхем приемопередатчиков, либо применением приемопередатчиков со встроенной гальванической развязкой сигналов и питания (например, MAX1480). Тогда вместе с дифференциальными проводниками прокладываются провод изолированной "земли" (сигнальной "земли") и, возможно, провод изолированного питания линии, рисунок 2.11.
Дренажный провод - провод, прокладываемый вместе с витой парой и соединяющий "земли" удаленных устройств. Через этот провод уравниваются потенциалы "земель". При включении устройства в линию дренажный провод следует подсоединять первым, а при отключении - отсоединять последним. Для ограничения тока через дренажный провод его заземляют в каждом устройстве через резистор в 100 Ом (0.5 Вт).
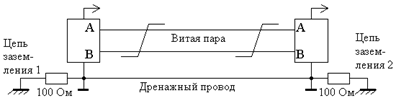
Рис. 2.11. Гальваническая развязка линии.
- Замыкание на высоковольтные цепи.
Если существует опасность попадания на линию или одну из местных "земель" высокого напряжения, следует применять опторазвязку или шунтирующие ограничители напряжения. А лучше и то и другое.
Напряжение пробоя опторазвязанного интерфейса составляет сотни и даже тысячи вольт. Это хорошо защищает устройство от перенапряжения, общего для всех проводников линии. Однако, при дифференциальных перенапряжениях, когда высокий потенциал оказывается на одном из проводников, сам приемопередатчик будет поврежден.
Для защиты от дифференциальных перенапряжений все проводники линии, включая изолированный общий, шунтируются на локальные "земли" при помощи ограничителей напряжения. Это могут быть варисторы, полупроводниковые ограничители напряжения и газоразрядные трубки. Физический принцип их действия разный, но суть одна - при напряжении выше порогового их сопротивление резко падает, и они шунтируют линию. Газоразрядные трубки могут шунтировать очень большие токи, но имеют высокий порог пробоя и низкое быстродействие, поэтому их лучше применять по трехступенчатой схеме вместе с полупроводниковыми ограничителями. Когда заземление линии невозможно, проводники линии шунтируют ограничителями между собой. Но это защитит только от дифференциальных перенапряжений - защиту от общего должна взять на себя опторазвязка, рисунок 2.12.
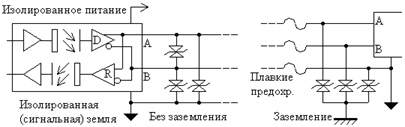
Рис. 2.12. Защита от перенапряжений.
Защита ограничителями напряжения действенна при кратковременных перенапряжениях. При длительных - токи короткого замыкания могут вывести ограничители из строя, и устройства на линии окажутся без защиты. Для защиты от коротких замыканий в линию можно последовательно включить плавкие предохранители.
2.10
Дополнительные меры защиты от помех
- Диагностика.
Если есть возможность выбора маршрута прокладки кабеля с замером уровня помех - не стоит ей пренебрегать. Даже если программная коррекция ошибок успешно справляется со сбоями, нужно сделать все, чтобы физически снизить уровень помех в линии. Полезно предусмотреть в программе диагностический режим, в котором накапливалась бы статистика сбоев, отрабатываемых программной коррекцией (провал по контрольной сумме или тайм-ауту). Если сбоев слишком много, желательно поработать над поиском и устранением их причины. Снижение скорости связи (бодрейта) во многих случаях повышает помехоустойчивость. Не имеет смысла устанавливать скорость обмена больше, чем необходимо для нормальной работы системы, если только не требуется запас на модификацию.
- Прокладка кабеля.
По возможности не следует проводить витую пару вдоль силовых кабелей, тем более в общей оплетке, так как существует опасность наводок от силовых токов через взаимную индуктивность. Силовое оборудование, коммутирующее большие токи, также является источником помех. Сигнальные цепи питания оптоизолированной линии лучше не использовать для питания чего-либо еще, так как протекающие по сигнальной "земле" лишние токи могут вносить в линию дополнительный шум. Некачественная витая пара с асимметричными характеристиками проводников - еще один источник проблем. Чем меньше шаг витой пары (чаще перевиты провода) - тем лучше. Даже если не применяется опторазвязанная линия или дренаж, стоит сразу провести кабель с запасной витой парой - на случай, если произойдет обрыв первой или все же понадобится провести сигнальную землю.
- Экранирование и заземление.
В промышленных условиях, тяжелых в плане электромагнитного шума, рекомендуется применять экранированный кабель с витой парой. Экран, охватывающий проводники линии, защищает их от паразитных емкостных связей и внешних магнитных полей. Экран следует заземлять только в одной из крайних точек линии. Заземление в нескольких точках недопустимо: из-за разности потенциалов местных "земель" по экрану могут протекать существенные токи, которые будут создавать наводки на сигнальные проводники. Некоторые разработчики рекомендуют для защиты от радиопомех дополнительно включать в нескольких местах между экраном и заземлением специальные высокочастотные конденсаторы емкостью 1...10 нФ.
- Индуктивные фильтры.
Если в линию все же попадают высокочастотные помехи, их можно отсеять индуктивными фильтрами, рисунок 2.13. Существуют специальные индуктивные фильтры, предназначенные для подавления высокочастотных помех в линиях связи. Они последовательно включаются в линию непосредственно у приемников. Например, B82790-S**** фирмы Epcos, выполненный в виде четырехполюсника, через который витая пара подсоединяется к приемнику.

Рис. 2.13. Индуктивный фильтр.
3.
Разводка сетей RS-485
RS-485 передает цифровую информацию между многими объектами. Скорость передачи данных может достигать 10 Мбит/с, а иногда и превышать эту величину. RS-485 предназначен для передачи этой информации на значительные расстояния, и 1000 метров хорошо укладывается в его возможности. Расстояние и скорость передачи данных, с которыми RS-485 может успешно использоваться, зависят от многих моментов при разработке схемы межсоединений системы.
3.1
Кабель
RS-485 спроектирован как балансная система. Проще говоря, это означает, что, помимо земляного, имеется два провода, которые используются для передачи сигнала, рисунок 3.1.

Рис. 3.1. Балансная система использует, помимо земляного, два провода для передачи данных.
Система называется балансной, потому что сигнал на одном проводе является идеально точной противоположностью сигнала на втором проводе. Другими словами, если один провод передает высокий уровень, другой провод будет передавать низкий уровень, и наоборот, рисунок 3.2.

Рис. 3.2. Сигналы на двух проводах балансной системы идеально противоположны.
Несмотря на то, что RS-485 может успешно осуществлять передачу с использованием различных типов передающей среды, он должен использоваться с проводкой, обычно называемой "витая пара".
Как следует из ее названия, витая пара - это просто пара проводов, которые имеют равную длину и свиты вместе. Использование передатчика, отвечающего требованиям спецификации RS-485, с кабелем на основе витой пары, уменьшает два главных источника проблем для разработчиков быстродействующих территориально распределенных сетей, а именно излучаемые электромагнитные помехи и индуцируемые электромагнитные помехи (наводка).
3.2
Излучаемые электромагнитные помехи
Как показано на рисунке 3.3., всякий раз, когда для передачи информации используются импульсы с крутыми фронтами, в сигнале присутствуют высокочастотные составляющие. Эти крутые фронты нужны при более высоких скоростях, чем способен обеспечить RS-485.

Рис. 3.3. Форма сигнала последовательности прямоугольных импульсов с частотой 125 кГц и ее БПФ
Полученные в итоге высокочастотные компоненты этих крутых фронтов вместе с длинными проводами могут привести к излучению электромагнитных помех (EMI). Балансная система, использующая линии связи на основе витой пары, уменьшает этот эффект, делая систему неэффективным излучателем. Это работает на очень простом принципе. Поскольку сигналы на линиях равны, но инверсны, излучаемые от каждого провода сигналы будут также иметь тенденцию быть равными, но инверсными. Это создает эффект подавления одного сигнала другим, что, в свою очередь, означает отсутствие электромагнитного излучения. Однако, это основано на предположении, что провода имеют точно одинаковую длину и точно одинаковое расположение. Поскольку невозможно одновременно иметь два провода абсолютно одинаково расположенными, провода должны быть близко друг к другу насколько возможно. Скручивание проводов помогает нейтрализовать любое остаточное электро-магнитное излучение из-за конечного расстояния между двумя проводами.
3.3 Индуцируемые электромагнитные помехи
Индуцируемые электромагнитные помехи - в основном та же самая проблема, что и излучаемые, но наоборот. Межсоединения, используемые в системе на основе RS-485, также действуют как антенна, которая получает нежелательные сигналы. Эти нежелательные сигналы могут искажать полезные сигналы, что, в свою очередь, может привести к ошибкам в данных. По той же самой причине, по которой витая пара помогает предотвращать излучение электромагнитных помех, она также поможет снизить влияние наводимых электромагнитных помех. Поскольку два провода расположены вместе и скручены, шум, наведенный на одном проводе будет иметь тенденцию быть тем же самым, что и наведенный на втором проводе. Этот тип шума называют "синфазным шумом". Поскольку приемники RS-485 предназначены для обнаружения сигналов, которые являются противоположностью друг друга, они могут легко подавлять шум, который является общим для обоих проводов.
3.4 Волновое сопротивление витой пары
В зависимости от геометрии кабеля и материалов, используемых в изоляции, витая пара будетобладать соответствующим "волновым сопротивлением (характеристическим импедансом)", которое обычно определяется ее производителем. Спецификация RS-485 рекомендует, но явно не навязывает, чтобы это волновое сопротивление было равно 120 Ом. Рекомендация этого импеданса необходима для вычисления наихудшей нагрузки и диапазонов синфазных напряжений, определенных в спецификации RS-485. По всей видимости, спецификация не диктует этот импеданс в интересах гибкости. Если по каким-либо причинам не может использоваться 120-омный кабель, рекомендуется, чтобы наихудший вариант нагрузки (допустимое число передатчиков и приемников) и наихудшие диапазоны синфазных напряжений были повторно рассчитаны, дабы удостовериться, что проектируемая система будет работать.
3.5 Согласующие резисторы
Поскольку затронуты высокие частоты и большие расстояния, должное внимание должно быть уделено эффектам, возникающим в линиях связи. Однако, детальное обсуждение этих эффектов и корректных методов согласования далеко выходит за рамки настоящей статьи. Помня об этом, техника согласования будет кратко рассмотрена в своей простейшей форме, постольку, поскольку она имеет отношение к RS-485.
Согласующий резистор - это просто резистор, который установлен на крайнем конце или концах кабеля, рисунок 3.4. В идеале, сопротивление согласующего резистора равно волновому сопротивлению кабеля.

Рис 3.4. Согласующие резисторы должны иметь сопротивление, равное волновому сопротивлению витой пары и должны размещаться на дальних концах кабеля.
Если сопротивление согласующих резисторов не равно волновому сопротивлению кабеля, произойдет отражение, т.е. сигнал вернется по кабелю обратно. Это описывается уравнением (Rt-Zo)/(Zo+Rt), где Zo - сопротивление кабеля, а Rt - номинал согласующего резистора. Хотя, в силу допустимых отклонений в кабеле и резисторе, некоторое отражение неизбежно, значительные расхождения могут вызвать отражения, достаточно большие для того, чтобы привести к ошибкам в данных, рисунок 3.5.

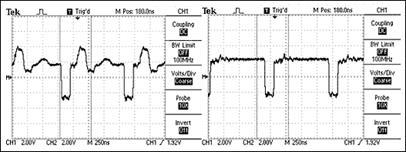
Рис. 3.5. Используя схему, показанную на верхнем рисунке, сигнал слева был получен с MAX3485, нагруженным на 120-омную витую пару, и 54-омным согласующим резистором. Сигнал справа был получен при корректном согласовании с помощью 120-омного резистора.
Помня об этом, важно обеспечить максимально-возможную близость значений сопротивления согласующего резистора и волнового сопротивления. Место установки согласующего резистора так-же очень важно. Согласующие резисторы должны всегда размещаться на дальних концах кабеля.
Как общее правило, согласующие резисторы должны быть помещены на обоих дальних концах кабеля. Хотя правильное согласование обоих концов абсолютно критично для большинства системных дизайнов, можно утверждать, что в одном специальном случае необходим только один согласующий резистор. Этот случай имеет место в системе, в которой имеется единственный передатчик, и этот единственный передатчик расположен на дальнем конце кабеля. В этом случае нет необходимости размещать согласующий резистор на конце кабеля с передатчиком, поскольку сигнал всегда распространяется от этого передатчика.
3.6 Максимальное число передатчиков и приемников в сети
Простейшая сеть на основе RS-485 состоит из одного передатчика и одного приемника. Хотя это и полезно в ряде приложении, но RS-485 привносит большую гибкость, разрешая более одного приемника и передатчика на одной витой паре. Допустимый максимум зависит от того, насколько каждое из устройств загружает систему.
В идеальном мире, все приемники и неактивные передатчики будут иметь бесконечный импеданс и никогда не будут нагружать систему. В реальном мире, однако, так не бывает. Каждый приемник, подключенный к сети и все неактивные передатчики увеличивают нагрузку. Чтобы помочь разработчику сети на основе RS-485 выяснить, сколько устройств могут быть добавлены к сети, была создана гипотетическая единица, называемая "единичная нагрузка (unit load)". Все устройства, которые подключаются к сети RS-485, должны характеризоваться отношением множителей или долей единичной нагрузки. Два примера - MAX3485, который специфицирован как 1 единичная нагрузка, и MAX487, который специфицирован как 1/4 единичной нагрузки. Максимальное число единичных нагрузок на витой паре (принимая, что мы имеем дело с должным образом согласованным кабелем, имеющим волновое сопротивление 120 Ом или больше) - 32. Для приведенных выше примеров это означает, что в одну сеть могут быть включены до 32 устройств MAX3485 или до 128 MAX487.
3.7 Примеры правильных сетей
Вооружившись приведенной выше информацией, мы готовы разработать некоторые сети на основе RS-485. Вот несколько простых примеров.
3.7.1 Один передатчик, один приемник
Простейшая сеть - это один передатчик и один приемник, рисунок 3.6. В этом примере, согласующий резистор показан на кабеле на стороне передатчика. Хотя здесь это необязательно, вероятно хорошей привычкой было бы проектировать сети с обоими согласующими резисторами. Это позволят перемещать передатчик в места, отличные от дальнего конца кабеля, а также позволяет, если в этом возникнет необходимость, добавить в сеть дополнительные передатчики.

Рис. 3.6. Сеть RS-485 с одним передатчиком и одним приемником.
3.7.2 Один передатчик, несколько приемников
На рисунке 3.7. представлена сеть с одним передатчиком и несколькими приемниками. Здесь важно, чтобы расстояния от витой пары до приемников были как можно короче.

Рис. 3.7. Сеть RS-485 с одним передатчиком и несколькими приемниками.
3.7.3 Два приемопередатчика
На рисунке 3.8. представлена сеть с двумя приемопередатчиками.

Рис. 3.8. Сеть RS-485 с двумя приемопередатчиками.
3.7.4 Несколько приемопередатчиков
На рисунке 3.9. представлена сеть с несколькими приемопередатчиками. Как и в примере с одним передатчиком и несколькими приемниками, важно, чтобы расстояния от витой пары до приемников были как можно короче.

Рис. 3.9. Сеть RS-485 с несколькими приемопередатчиками.
3.8 Примеры неправильных сетей
Ниже представлены примеры неправильно сконфигурированных систем. В каждом примере сравнивается форма сигнала, полученного от некорректно разработанной сети, с формой сигнала, полученного от должным образом разработанной системы. Форма сигнала измерялась дифференциально в точках A и B (A-B).
3.8.1 Несогласованная сеть
В этом примере, рисунок 3.10., на концах витой пары отсутствуют согласующие резисторы. Поскольку сигнал распространяется от источника, он сталкивается с открытой цепью на конце кабеля. Это приводит к рассогласованию импедансов, вызывая отражение. В случае открытой цепи (как показано ниже), вся энергия отражается назад к источнику, вызывая сильное искажение формы сигнала.


Рис. 3.10. Несогласованная сеть RS-485 (вверху) и ее итоговая форма сигнала (слева) по сравнению с сигналом, полученным на правильно согласованной сети (справа).
3.8.2 Неправильное расположение терминатора
На рисунке 3.11. согласующий резистор (терминатор) присутствует, но его размещение отличается от дальнего конца кабеля. Поскольку сигнал распространяется от источника, он сталкивается с двумя рассогласованиями импеданса. Первое встречается на согласующем резисторе. Даже при том, что резистор согласован с волновым сопротивлением кабеля, есть еще кабель за резистором. Этот дополнительный кабель вызывает рассогласование, а значит и отражение сигнала. Второе рассогласование, это конец несогласованного кабеля, ведет к дополнительным отражениям.


Рис. 3.11. Сеть RS-485 с неправильно размещенным согласующим резистором (верхний рисунок) и ее итоговая форма сигнала (слева) по сравнению с сигналом, полученным на правильно согласованной сети (справа).
3.8.3 Составные кабели
На рисунке 3.12. имеется целый ряд проблем с организацией межсоединений. Первая проблема заключается в том, что драйверы RS-485 разработаны для управления только одной, правильным образом согласованной, витой парой. Здесь же каждый передатчик управляет четырьмя параллельными витыми парами. Это означает, что требуемые минимальные логические уровни не могут гарантироваться. В дополнение к тяжелой нагрузке, имеется рассогласование импедансов в точке, где соединяются несколько кабелей. Рассогласование импедансов в очередной раз означает отражения и, как следствие, искажение сигнала.

Рис. 3.12. Сеть RS-485, некорректно использующая несколько витых пар.
3.8.4 Длинные ответвители
На рисунке 3.13., кабель корректно согласован и передатчик нагружен только на одну витую пару; однако сегмент провода в точке подключения (ответвитель - stub) приемника чрезмерно длинный. Длинные ответвители вызывают значительное рассогласование импедансов и, таким образом, отражение сигнала. Все ответвители должны быть как можно короче.


Рис. 3.13. Сеть RS-485 использующая 3-метровый ответвитель (рисунок сверху) и ее итоговый сигнал (слева) по сравнению с сигналом, полученным с коротким ответвлением
4. Промышленная локальная сеть для проведения ГТИ
4.1 Станция геолого-технологических исследований
Геолого-технологические исследования (ГТИ) – это совокупность методов и средств, применяемых на буровой с целью получения достоверной информации о геологии разреза скважины и с целью оптимизации режимов бурения. ГТИ выполняется для бурения разведочных, эксплуатационных, наклонно-направленных и горизонтальных скважин.
Станция ГТИ представляет собой совокупность датчиков, систем сбора данных (ССД), обработки данных (СОД) и индикаторов. Она предназначена для автоматизации ГТИ, в том числе для регистрации технологических параметров, архивирования и документирования полученных данных, определения видов работ и нештатных ситуаций. Станция ГТИ может содержать средства индикации технологических параметров (дисплеи) и оповещения (звуковые, световые). Станция может использоваться для автоматизации работ на скважине.
Задачи станции:
– непрерывный прием сигналов от датчиков и аппаратуры газового каротажа в автоматическом режиме, забойной инклинометрической системы;
– автоматическую обработку принятых сигналов, интерпретацию полученной информации и представление ее в виде диаграмм, таблиц;
– распознавание и предупреждение на ранней стадии возникновения предаварийных и аварийных ситуаций, непредвиденных осложнений, в том числе газонефтепроявлений;
– контроль бурения, а именно углубления забоя, спуско-подъемных операций (СПО) с контролем долива скважины, цементирования;
– определение в процессе бурения литологического разреза, выделения пластов коллекторов, определение пластового давления в процессе бурения и прогноз пластового давления, прогноз и определение зон АВПД;
– определение параметров газового каротажа, продуктивности пластов коллекторов;
– построение уточненного геологического разреза по данным, полученным в процессе бурения и исследования шлама и керна (ввод данных, расчеты, печать стратиграфического разреза, шламограммы, карбонатограммы, результатов люминесцентного, битуминологического и др. анализов шлама и керна, результатов газового каротажа);
– контроль и прогноз траектории скважины;
– выполнение расчетов при решении геологических, технологических задач проводки скважины;
– визуализацию всей полученной по скважине информации на экране монитора;
– накопление и хранение всей полученной информации по скважине;
– формирование и печать отчетной документации по скважине;
– передачу получаемой информации средствами радио, сотовой или проводной связи в центр сбора;
– копирование информации по скважине для ее последующей обработки в центре сбора.
– Предоставление в режиме реального времени информации о ходе бурения представителю заказчика и различным службам (количество подключаемых рабочих мест оговаривается в договоре).
– Оперативный обмен информацией между службами.
4.2 Состав и структура станции
На рис 4.1 показана структурная схема станции ГТИ. Канал связи BITBUS позволяет подключать до 255 ССД и представляет собой интерфейс, специально разработанный и оптимизированный для связи программируемых контроллеров, управляющих ЭВМ и т.п. и интеграции этих устройств в локальную управляющую сеть распределенных АСУ ТП.
Поскольку в соответствии с теорией систем, структурные системы автоматизации строятся, как правило, подобно объектам управления, а объекты в подавляющем большинстве имеют иерархическую структуру, в основу сети BITBUS также положен иерархический принцип.

Рис 4.1. структурная схема станции ГТИ.
1 - промышленный компьютер, ведущий узел сети BITBUS; 2 - адаптер сети BITBUS для компьютера BB_ISA; 3 - ретранслятор сети BITBUS (для больших расстояний); 4 - интеллектуальное УСО с интерфейсом BITBUS; 5 - программируемый контроллер моноблочный, с интерфейсом BITBUS; 6 - программируемый контроллер магистрально-модульный, с интерфейсом BITBUS; 7 - шлюз; 8 - программируемый контроллер магистрально-модульный, с произвольным интерфейсом; 9 - интеллектуальные датчики. 10 - интеллектуальные датчики (хроматограф)
Центральным элементом сети BITBUS является ведущее устройство, функции которого, как правило, возлагаются на промышленный компьютер (1). Этот компьютер обычно выполняет несколько функций:
– инструментальное средство для программирования контроллеров;
– графическая операторская станция;
– элемент локальной сети (LAN) верхнего уровня АСУ ТП.
На практике в качестве этого элемента системы часто применяют IBM-совместимые персональные компьютеры. Интерфейс с локальной сетью BITBUS осуществляет адаптер сети BB_ISA (2), установленный в PCI слот компьютера. Как правило, применяются адаптеры, обеспечивающие гальваническую изоляцию компьютера от сети BITBUS.
Протокол BITBUS определяет два режима передачи данных по шине:
1. Синхронный режим, этот режим используется при необходимости работы на большой скорости, но на ограниченных расстояниях. В этом случае топология сети может включать до 28 узлов, а длина шины ограничиваться 30 м. Скорость может быть от 500 до 2400 кбод. Синхронный режим передачи предполагает использование двух дифференциальных сигнальных пар: одной для данных, другой для синхронизации.
2. Режим с самосинхронизацией, использование этого режима позволяет значительно удлинить шину. Стандартом определены три скорости передачи: 1500 Мбод, 375 кбод (до 300 м) и 62,5 кбод (до 1200 м). Используя шинные репитеры, можно объединять последовательно несколько шинных сегментов (до 28 узлов на сегмент). Тогда общее число узлов можно довести до 250, длину общей шины — до нескольких километров. При этом режиме передачи используются две дифференциальные пары: одна для данных и одна для управления репитером.
На физическом уровне реализации BITBUS соответствуют спецификациям RS-485. RS-485 получил за последние годы наиболее широкое распространение в локальных сетях нижнего уровня, подтверждая правильность выбора разработчиков BITBUS. Физической средой в сети обычно является экранированная витая пара. В качестве альтернативной среды иногда применяют оптоволокно.
Сеть BITBUS может иметь различную топологию - линейную, древовидную или звездообразную, что позволяет легко приспосабливать конфигурацию сети к существующим производственным помещениям и расположению оборудования. Конфигурация сети может наращиваться и видоизменяться в процессе ее эксплуатации. В зависимости от используемой скорости передачи длина одного сегмента может быть 300 м или 1200 м. Для увеличения расстояния используются ретрансляторы (3), максимальное расстояние при этом достигает 13,2 км. Управление ретрансляторами предусмотрено в интерфейсе. Для этого используется вторая витая пара.
В данном дипломном проекте расстояние между контроллером и компьютером не будет превышать 300м, что в полнее достаточно при проведении ГТИ и ГК.
Сеть объединяет разнообразные устройства ввода-вывода - от интеллектуальных УСО (4) до программируемых контроллеров (5, 6). Контроллеры, которые не имеют штатного выхода в интерфейс BITBUS (8), подключаются через шлюзы (7).На "более низком" уровне иерархии, чем сеть BITBUS, применяются удаленные интеллектуальные датчики (9), подключаемые по последовательным каналам RS-232 или RS-485.
Основные технические данные сети BITBUS приведены в таблице 4.1.:
Таблица 4.1. Характеристики сети BitBus.
| Топология |
линейная или древовидная |
| Длина сети |
от 300 м до 13,2 км |
| Физическая среда передачи данных |
витая пара |
| Альтернативная Среда |
оптоволокно |
| Основной тип разъема |
D-SUB 9 |
| Скорость передачи |
375 Кбит/с или 62,5 Кбит/с |
| Характерное время ответа |
1 мс |
| Канальный уровень протокола |
SDLC |
| Максимальное количество узлов |
250 |
4.2.1 Система сбора данных
Система сбора данных ССД
предназначена для опроса и предварительной обработки сигналов с первичных датчиков технологических параметров и передачи данных в форме кода импульсного сигнала на регистрирующий комплекс.
Представляет собой подключенное к каналу связи BitBus устройство, выполнено на базе сигнального процессора ADSP-218x фирмы Analog Devis, связной контроллер TCM32F или TU2000 фирмы Tecon и устройство согласования датчиков. В ССД предусмотрена установка контроллера (вторичного) канала связи RS-485/UART. Через этот канал связи ССД может передавать информацию на показывающие приборы, к этому каналу связи можно так же подключать датчики, имеющие цифровой интерфейс (всего – до 255 устройств).
ССД размещается в стальном пылезащищенном крейте и устанавливается на буровой, поблизости от датчиков.
| Интерфейс обмена данными с компьютером |
RS-485 |
| Максимальное рабочее напряжение, В |
25 |
| Входное сопротивление, кОм |
100 |
| Габаритные размеры, мм |
570х510х120 |
| Масса, кг |
10 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
Таблица 4.2. Технические характеристики ССД.
4.2.2 Асинхронный Адаптер Шины BITBUS (Master/Slave)
Модуль TPG/BB_ISA (Micro TCX) предназначен для использования в распределенных системах в качестве ведущего или ведомого устройства по промышленной шине BitBus.
Конструктивно модуль может использоваться как в PC совместимых компьютерах, так и в стандарте MicroPC, в зависимости от сборки.
Модуль TPG/BB_ISA выполнен на основе микропроцессора DS80C320 семейства MCS-51, имеет гальваническую развязку от локальной сети и возможность аппаратного сброса посредством команды от PC. На плате предусмотрено подключение терминирующих резисторов (120 Ом) с помощью перемычек. Для работы адаптер TPG/BB_ISA использует 8 последовательных адресов в пространстве ввода/вывода.
Базовый адрес задается с помощью трех перемычек на плате. Обмен данными между модулем и PC осуществляется по опросу готовности адаптера или по прерыванию.
Поддержка протокола BitBus обеспечивается встроенным программным обеспечением, которое можно обновлять с помощью стандартных средств как удалённо, по шине, так и через порты ввода/вывода. Это позволяет производить быстрое обновление ПО во всех устройствах сети без выключения и демонтажа контроллеров.Модуль может осуществлять обмен данными по шине со скоростью 375 Кбит/с, 187,5Кбит/с или 62,5Кбит/с.
Выбор скорости приема/передачи определяется перемычками на плате.
Кроме коммуникационных функций контроллер может исполнять пользовательские задачи (например, сбор данных). Пользовательские задачи загружаются одним исполнительным модулем с операционной системой OS51 и коммуникационным ПО в Flash-память адаптера.
Функциональность адаптера определяется встроенным ПО и прошивкой вентильной матрицы Altera, поэтому имеются широкие возможности модификации модуля для конкретной задачи, добавления/изменения функциональности, увеличения скорости передачи и так далее. Таким образом, можно использовать адаптер для управления устройствами сбора данных без использования дополнительных контроллеров и процессорных плат.
Таблица 4.3. Характеристики адаптерf шины BitBus
| Входной |
Интерфейс |
ISA |
| Разъем |
ISA (8-битный) |
| Адреса портов |
200h,208h,2A0h,300h,308h,310h,318h,3A0h |
| Номера прерывания |
IRQ3, IRQ4, IRQ5, IRQ7 |
| Гальваническая развязка по питанию |
Выходной последова-
тельный
|
Контроллер ввода-
вывода
|
SDLC (реализован прошивкой FPGA) |
| Приемопередатчик |
RS-485 (ADM1485) |
| Разъем |
DB-9 |
| Тип кабеля |
FTP ANSI/ETA/TIA 568A CAT5 |
Соответствие между скоростью передачи
данных и гарантированной
протяженностью канала
|
62,5 Кбит/с |
1200 м |
| 187,5 Кбит/с |
300 м |
| 375 Кбит/с |
60 м |
| Способ кодирования |
NRZI |
| Оптоэлектронная развязка по сигналам |
| Драйверы Программное обеспечение |
| Windows NT/98/2000 |
Windows монитор |
| OS/2 |
C/C++ библиотека |
| MS DOS |
| QNX |
| Физические характеристики |
| Напряжение питания и ток потребления |
+5В±5%, 200мА |
| Индикация |
Два светодиода (Красный/Зеленый) |
| Условия хранения |
Температура |
-50°С…+120°С |
Условия эксплуата-
ции
|
Температура |
0…+70°С |
| Влажность |
0…90% |
| Размеры |
Длина |
100±0,1 мм |
| Ширина |
127±0,1 мм |
| Высота |
14,5±0,1 мм |
| Дополнительно |
| CPU |
DS80C320 (Intel 80x51), 24МГц или выше |
| RAM |
32Кбайт памяти данных |
| FLASH |
32 Кбайт |
| Возможность обновления прошивок |
FLASH может быть перепрограммирована
через регистры шины ISA (встроенное программное обеспечение)
|
4.2.3 Компьютерное обеспечение станции
В комплект станции ГТИ входит два IBM-совместимых компьютера, связанных между собой по схеме клиент-сервер. Один из которых снабжен контроллером канала связи BitBus и является ведущим узлом (Host) на шине BitBus.
В качестве контроллера канала связи используется контроллер BB_ISA (Micro TCX), обеспечивающий обмен по сети BitBus пакетами до 74байт.
Сервер используется для регистрации и хранения технологической информации в локальной базе данных. На компьютере Клиент выполняются приложения контроля процесса бурения, обработки геофизического материала, формирования документов.
Требования, предъявляемые к комплектации станции компьютерам:
| Минимальные требования |
| Операционная система |
Microsoft Windows 2000 Professional, Windows XP, Windows 2003 Server, |
| Процессор |
Intel Pentium IV 2.8GHz/512kb/FSB400 /512MHz |
| Материнская плата |
На чипсете i854 Socket 478 производителей ASUS, MSI, INTEL, ABIT |
| Оперативная память |
DIMM DDR 512 Brandname |
| Видеоадаптер |
AGP с памятью 64Mb Microsoft - сертифицированная |
| Жесткий диск HDD |
40 Гб Maxtor, Seagate UATA100/133 или SCSI |
| DVD-RW |
40х12х48 ASUS, Nec, Teac |
| Звуковая карта |
SB или интегрированная в MB, сертифицированная Microsoft |
| Коробка для съемных дисков |
Mobile RACK 3.5” UATA100 |
| Монитор |
17” зерно 0.24 1600х1280/85 Гц TCO’99, сертифицированный Microsoft |
| Принтер |
Цветной струйный А4 (min) с высокой скоростью печати (12-20 стр./мин), HP, Epson, Canon |
Таблица 4.4. Технические характеристики компьютеров.
4.2.4
Технологический комплект станции ГТИ (Датчики)
В комплект технологических датчиков станции ГТИ входят следующие датчики:
– вес на крюке;
– оборотов лебедки;
– момента на ротора;
– оборотов ротора;
– ходов насоса;
– положения клиньев;
– давления промывочной жидкости (ПЖ);
– индикатор расхода на выходе;
– расхода ПЖ на входе;
– уровня ПЖ; уровня,
– плотности и температуры ПЖ (комплексный датчик) в емкостях.
Аппаратный комплекс газового каротажа
включает: анализатор суммарного газосодержания, анализатор компонентного состава в газовой смеси (хроматограф).
Аппаратно-программный комплекс информационного обмена нижнего уровня
магистрального типа, выполняющий функции опроса и предварительной обработки сигналов поступающих с датчиков и анализатора суммарного газосодержания, а также связь с устройствами оперативного отображения информации (пультом бурильщика).
4.2.4.1 Технологические датчики
Датчик оборотов лебедки
(ДОЛ-3) предназначен для подсчета количества импульсов, пропорциональных числу оборотов вала лебедки.
Технические характеристики ДОЛ-3:
| Количество импульсов на 1 оборот |
20 |
| Диапазон рабочих скоростей, об/мин |
0 - 1350 |
| Максимально допустимая скорость вращения, об/мин |
1500 |
| Случайная погрешность |
±0.166 |
| Питание, В |
12 |
| Габаритные размеры, мм |
260х200х85 |
| Масса не более, кг |
5 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
Показания датчика ДОЛ-3 используется для расчета: положения долота в скважине, положения крюка над столом ротора, глубины скважины, механической скорости проходки скважины, скорость подачи при спуско - подъемных операциях и положения бурового инструмента при осуществлении этих операций.
Датчик веса ДАВ-20
. Вес инструмента на крюке определяется путем измерения натяжения неподвижного («мертвого») конца талевой системы. Используемый датчик тензометрический.
Технические характеристики ДАВ-20:
| Диапазон измерения натяжения талевого каната, кН |
0-200 |
| Уровень выходного согнала, мА |
4 - 20 |
| Относительная погрешность, % |
± 1 |
| Питание, В |
12 |
| Габаритные размеры |
280х175х102 |
| Масса не более, кг |
7 |
| Рабочий диапазон температуры, °С |
-50 … + 60 |
Датчик давления КРТ-5-25
предназначен для измерения давления в нагнетательной линии буровых насосов.
Технические характеристики КРТ-5-25:
| Диапазон измерения давления, атм |
0 - 250 |
| Уровень выходного согнала, мА |
4 - 20 |
| Относительная погрешность измерения, % |
± 1 |
| Питание, В |
12 |
| Габаритные размеры |
40х90х90 |
| Масса не более, кг |
1 |
| Рабочий диапазон температуры, °С |
-50 … + 60 |
Комплексный датчик плотности, уровня и температуры КД-3
предназначен для контроля перечисленных параметров бурового раствора в емкости. Плотность определяется путем измерения разности давлений.
Технические характеристики КД-3:
Диапазоны контролируемых параметров
- Объемная плотность, г/см3
- Уровень, мм
- Температура, °С
|
0.9 – 2.4
0 – 2300
0 - 100
|
| Диапазон измерений выходного сигнала, В |
0 - 10 |
| Напряжения питания постоянным током, мА |
12 |
Основная приведенная погрешность измерений:
- Объемная плотность, %
- Уровень, %
- Температура, %
|
0.5
1
0.5
|
Габаритные размеры:
- Диаметр блока преобразования, мм
- Высота, мм
- Масса не более, кг
|
100
2800
14
|
| Рабочий диапазон температуры, °С |
-50 +60 |
Датчик уровня механический
предназначен для дистанционной регистрации уровня жидкости в открытых и закрытых емкостях. Уровень определяется путем регистрации положения поплавка, контактирующего с поверхностью контролируемой жидкости. Принцип работы основан на изменении сопротивления омического датчика перемещения.
Технические характеристики датчика уровня:
| Диапазон, измерений, мм |
0 - 4000 |
| Основная приведенная погрешность измерений, % |
0.5 |
| Напряжение питания, В |
12 |
| Рабочий диапазон температуры, °С |
-50…+60 |
Индикатор расхода на входе
предназначен для качественной оценки баланса циркуляции бурового раствора путем регистрации интенсивности потока на выходе из скважины. Работа прибора основана на перемещении оси расходного датчика.
Технические характеристики:
| Диапазон, измерений, мм |
0 - 4000 |
| Основная приведенная погрешность измерений, % |
0.5 |
| Напряжение питания, В |
12 |
| Рабочий диапазон температуры, |
-50 …+60 |
Датчик ходов насоса ЧДХ
предназначен для измерения числа ходов буровых насосов.
Технические характеристики ЧДХ:
| Диапазон, измерений, Гц |
0 – 2000 |
| Напряжение питания, В |
12 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
| Диапазон рабочей чувствительности, мм |
0 - 10 |
| Габаритные размеры, мм |
370х330х85 |
| Масса не более, кг |
2 |
Датчик оборотов ротора ДОР
предназначен для измерения количество оборотов бурового инструмента при роторном бурении.
Технические характеристики ДОР:
| Диапазон, измерений, Гц |
0 – 2000 |
| Напряжение питания, В |
12 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
| Диапазон рабочей чувствительности, мм |
0 - 10 |
| Габаритные размеры, мм |
370х330х85 |
| Масса не более, кг |
2 |
Датчик положения клиньев
предназначен для регистрации верхнего положения клиньев пневматического клинового захвата.
Технические характеристики:
| Уровень срабатывания, кПа |
400 |
| Уровень допустимой перегрузки датчика, кПа |
1000 |
| Напряжение питания, В |
12 |
| Масса не более, кг |
2 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
Датчик момента на роторе ДМР.
Предназначен для измерения величины крутящего момента на роторе.
Технические характеристики ДМР:
| Масса, кг |
15 |
| Начальный сигнал, В |
0.053 |
| Коэффициент преобразования датчика, В/кН |
0.2 |
| Габаритные размеры, мм |
65х210х5400 |
| Рабочая температура, °С |
-45 … +50 |
4.2.4.2 Аппаратный комплекс газового каротажа
Хроматограф.
Предназначен для определения покомпонентного содержания углеводородных газов в газовоздушной смеси, подаваемой по газовой линии из дегазатора бурового раствора.
Технические характеристики хроматографа:
| Предел обнаружения (по пропану), % |
0.0001 |
| Продолжительность цикла анализа С1 – С5, с |
90 |
| Тип интерфейса |
RS232 |
| Напряжение питания, В |
220 |
| Масса, кг |
14 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
Датчик суммарного газосодержания углеводородных газов СГ-5
Предназначен для непрерывного определения процентного содержания суммы углеводородов, содержащихся в газовоздушной смеси, выходящей из дегазатора. Кроме чувствительного элемента, в состав датчика входят, насос для подачи газовоздушной смеси и электроклапан для подачи на чувствительный элемент чистого воздуха с целью контроля «нуля».
Технические характеристики СГ-5:
| Диапазон определения метана, % |
0 - 100 |
| Производительность насоса, не менее, л/мин |
1 |
| Напряжение питания, В |
220 |
| Габаритные размеры, мм |
230х150х95 |
| Масса, кг |
10 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
Показывающий прибор «ТАБЛО»
. Предназначен для отображения регистрируемых данных в цифровом и аналоговом видах. Система позволяет устанавливать несколько подобных приборов – их количество может быть равно количеству регистрируемых параметров. Настройка индикатора для вывода конкретного параметра производится программно (настраиваются диапазон вывода, единицы измерения, допустимые границы параметра и т.д.). Конструкция прибора позволяет выдавать цветовую и звуковую сигнализацию при выходе значения параметра за допустимый диапазон.
Технические характеристики табло:
| Габаритные размеры, мм |
570х5120х120 |
| Масса, кг |
9 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
Показывающий прибор «цифровой индикатор»
. Предназначен для отображения регистрируемых данных в цифровом виде. Настраивается программно. Позволяет установить границы изменения параметра, индикацию отсутствия сигнала с датчика.
Технические характеристики индикатора:
| Габаритные размеры, мм |
275х210х100 |
| Масса, кг |
6 |
| Рабочий диапазон температуры, °С |
-50 … +60 |
4.4
Локальная
сеть
«BitBus – Wireless PCI Adapter – Wireless Access Point – Ethernet»
Передача данных из ССД в СОД осуществляется по каналу (кабелю) из пары скрученных проводников длинной 300м с частотой 115кГц. На конце этого кабеля смонтирован разъём DB9. Один конец этого кабеля соединяется с выходом платы BB_ISA (Micro TCX), установленный в компьютер СОД. Другой конец соединяется с аналогичным разъемом в ССД.
Указанных разъемов в крейте ССД два. Они равноправны и предназначены для подключения в цепочку нескольких ССД или других устройств, использующих для связи протокол BitBus. На плате ССД между разъемами RS-485, предусмотрена установка согласующей нагрузки – чип резистора номиналом 120Ом. Необходимо обеспечить, во-первых, чтобы устройства, подключенные к наиболее удаленным сегментам сети, имели эти нагрузочные резисторы и во-вторых, чтобы во всех остальных узлах сегмента сети, эти нагрузочные резисторы были отключены.
Обозначения:
К –
компьютер станции ГТИ и ГК (Клиент);
С –
компьютер станции ГТИ и ГК (Сервер);
HUB –
сетевой коммуникатор типа 10/100 Mb Ethernet Switch;
Wi-Fi
– сетевой коммуникатор типа 2,4 GHz Wireless Access Point стандарта 802.11b/g
Сплошной линией отображен кабель типа UTP (витая пара).
Сплошной жирной линией отображен канал связи BitBus.
Пунктирной линией отображен канал беспроводной компьютерной сети типа Wi-Fi.

Рис. 4.4. сеть «BitBus – Wireless PCI Adapter – Wireless Access Point – Ethernet»
Сплошной линией отображен кабель типа UTP (витая пара).
Сплошной жирной линией отображен канал связи BitBus.
Пунктирной линией отображен канал беспроводной компьютерной сети типа Wi-Fi.
Расстояние между станцией ГТИ и ГК и рабочим местом супервайзера – от 200 до 400 м.
Для передачи информации о технологических процессах в «Сервере» станции ГТИ используется карта типа Wireless PCI Adapter D-Link DWL-G510 (высокоскоростной 2.4ГГц (802.11g) беспроводной PCI адаптер).
Предназначен для подключения настольного компьютера к беспроводной сети. Он основан на последней усовершенствованной технологии, применяемой в чипах для беспроводного оборудования, с улучшенными функциями безопасности для защиты беспроводного соединения от внешних вторжений. Эта беспроводная сетевая карта стандарта 802.11g поддерживает скорость беспроводного соединения до 54 Мбит/с при работе с другими устройствами стандарта 802.11g, обеспечивая высокую пропускную способность, позволяющую передавать интенсивный поток данных.
| Общие характеристики |
| Тип |
Wi-Fi адаптер |
| Стандарт беспроводной связи |
802.11g |
| Интерфейс подключения |
PCI |
| Антенна |
| Тип антенны |
Съемная |
| Количество антенн |
1 |
| усиление антенны |
2 dBi |
| Прием/передача |
| Защита информации |
WEP, WPA |
| Мощность передатчика |
18 dBM |
| Радиус действия внутри помещения |
100м |
| Радиус действия вне помещения |
400м |
| Дополнительно |
| Размеры |
6x120x64 мм |
| Вес |
78 г |
| Дополнительная информация |
обладает обратной совместимостью с беспроводными устройствами стандарта 802.11b |
Таблица 4.5. Технические характеристики Wireless PCI Adapter D-Link DWL-G510
Адаптер DWL-G510 поддерживает WPA (Wi-Fi™ Protected Access) и 802.1x для аутентификации пользователей беспроводной сети, обеспечивая высокий уровень защиты данных и канала связи. В комплект поставки DWL-G510 входит программа настройки, позволяющая компьютеру обнаружить доступные беспроводные сети, а также создать и сохранять детализированные профили подключения для наиболее часто используемых сетей.
Сетевая карта поддерживает PCI plug-and-play, что позволяет легко установить ее в компьютер для прямого подключения к любому беспроводному устройству в режиме Ad-hoc или через точку доступа или маршрутизатор в режиме Инфраструктура. При использовании с другими продуктами серии D-Link AirPlusG сетевая карта автоматически подключится к сети.
У супервайзера устанавливается точка доступа типа Wireles Access Point
. Используется D-Link DWL-2000AP
DWL-2000AP - беспроводная точка доступа стандарта 802.11g с повышенной производительностью. Это устройство так же поддерживает скорость беспроводного соединения до 54 Мбит/с, в тоже время, сохраняя совместимость со всем существующим беспроводным оборудованием стандартов 802.11b и 802.11b+. Благодаря высокой скорости передачи данных, повышенной безопасности и встроенной функции моста, это устройство является идеальным беспроводным решением, расширяющим функциональность сети и в тоже время защищающим прошлые инвестиции благодаря совместимости с имеющимся сетевым оборудованием.
Увеличенная скорость и работа на частоте 2,4 ГГц до 54Мбит/с, доступной для общественного использования в большинстве стран, плюс мобильность и удобство, присущее беспроводным сетям, делают это устройство идеальным решением для приложений WLAN, требующих высокой полосы пропускания.
| Основная информация |
| Универсальный блок питания |
Нет |
| Встроенный сервер печати |
Нет |
| Сервер удалённого доступа |
Нет |
| Порт LAN |
10/100 Мбит/с Ethernet |
| Примечания о LAN |
Автоопределение MDI/MDIX |
| Порт HPNA |
Нет |
| Режимы работы |
| Точка доступа |
Да |
| Мост "точка-точка" |
Да |
| Мост "точка-многоточечное" |
Да |
| Беспроводный клиент |
Да |
| Антенна |
| Количество |
2 (1 внешняя и 1 внутренняя) |
| Тип |
Внешняя - диполь |
| Коэффициент усиления антенны |
2 dBi |
| Параметры беспроводной части |
| Мощность передатчика |
802.11b: 16dBm (типичная)
802.11g: 14dBm (типичная)
|
| Скорости работы для 802.11b |
22 Мбит/с
11 Мбит/с
11 Мбит/с
5,5 Мбит/с
2 Мбит/с
1 Мбит/с
|
| Скорости работы для 802.11g |
54 Мбит/с
48 Мбит/с
36 Мбит/с
24 Мбит/с
12 Мбит/с
9 Мбит/с
6 Мбит/с
|
Таблица 4.5. Технические характеристики Wireles Access Point D-Link DWL-2000AP.
Совместимость 802.11g с существующими стандартами беспроводных сетей означает то, что нет необходимости менять все сетевое оборудование для поддержки соединения.
DWL-2000AP может быть настроена для работы в одном из 4-х режимов: (1) как точка доступа, (2) беспроводный мост "точка-точка", (3) беспроводный мост "точка - много точек" или (4) беспроводный клиент. Благодаря этим встроенным функциям, DWL-2000AP предоставляет гибкость при конфигурировании, что позволяет удовлетворить требования сетевой среды.
Простота перехода к большей полосе пропускания
Обеспечивая совместимость с существующим беспроводным сетевым оборудованием, DWL-2000AP позволяет увеличивать пропускную способность сети в желаемом темпе. DWL-2000AP и другие устройства стандарта 802.11g могут быть постепенно добавлены в сеть, при этом остальная часть сети останется полностью связанной.
DWL-2000AP имеет встроенный DHCP сервер, который, как только будет активизирован, начнет автоматически назначать IP адреса беспроводным клиентам. Эта уникальная функция делает DWL-2000AP идеальным решением для быстрого создания и расширения беспроводных локальных сетей.
Расстояние от станции ГТИ и ГК и станцией телеметрии – 2-20 м. В станции ГТИ устанавливается коммутатор типа HUB модель D-Link DES-1008D/E, есть варианты, когда станция телеметрии находится в городке. Тогда сеть к ним прокладывается от HUB
, который находится у супервайзера. Необходимость в HUB
е в станции ГТИ и ГК отпадает.
Расстояние между компьютером супервайзера и рабочим местом бурового мастера, технолога, инженера по бурению, инженера по растворам – 10-100 м.
Возможные препятствия:
– Буровая установка между станцией ГТИ и ГК и рабочим местом супервайзера;
– Машины и другая техника между станцией ГТИ и ГК и рабочим местом супервайзера;
5. Расчет сети BitBus
5.1 Стандарты EIA RS-422A/RS-485
Большинство разработчиков систем промышленной автоматизации и сетей передачи данных в той или иной степени имеют представление о стандартах RS-422/RS-485. В самом деле, практически все компьютеры в промышленном исполнении оснащены средствами организации информационного обмена с использованием данных интерфейсов.
Современные интеллектуальные датчики и элементы управления наряду с традиционным интерфейсом RS-232-C также могут иметь в своем составе подсистему последовательного ввода-вывода информации на базе интерфейса RS-485. Программируемые логические контроллеры многих производителей в качестве средств организации территориально-распределенных систем сбора данных и управления содержат ту или иную реализацию интерфейсов RS-422/RS-485.
Несмотря на столь широкое распространение на отечественном рынке оборудования для промышленной автоматизации, имеющего в своем составе средства обмена данными, реализованные на базе стандартов EIA RS-422/RS-485, в отечественной нормативно-технической литературе отсутствуют их полноценные эквиваленты. Отчасти это можно объяснить тем, что данные стандарты фактически устанавливают требования только к электрическим характеристикам выходных каскадов передатчиков и входных каскадов приемников аппаратуры передачи данных, тогда как в имеющихся отечественных коммуникационных стандартах просматривается тенденция к охвату как можно большего количества уровней базовой модели взаимодействия открытых систем ISO. В результате информация, которой пользуются разработчики, сводится либо к отрывочным сведениям, содержащимся в документации на применяемые покупные технические средства, либо к справочным данным на приемопередатчики зарубежного производства. Следует отметить, что высокий технический уровень отечественных электронщиков и системных интеграторов в большинстве случаев обеспечивает успех разработки даже при наличии минимума нормативной информации. Однако даже после завершения приемо-сдаточных испытаний очередной системы у многих участников проекта остаются вопросы, к основным из которых можно отнести следующие:
– ограничения, относящиеся к количеству элементов оконечного оборудования сети, скорости передачи данных и максимальной протяженности линии связи;
– критерии выбора кабеля;
– реализация электрического питание и заземление аппаратуры, входящей в сеть передачи данных;
– защита аппаратуры сети от помех.
5.2 Основная конфигурация системы
Как правило, система содержит несколько приемников, несколько формирователей и согласующие резисторы. Каждый формирователь должен обеспечивать работу на 32 единицы нагрузки помимо согласующих резисторов, каждая из которых представляется совокупностью приемника и формирователя, находящегося в пассивном состоянии. Согласующие резисторы должны подключаться к линии связи в двух наиболее удаленных друг от друга местах подключения единиц нагрузки. Сопротивление каждого согласующего резистора должно совпадать с волновым сопротивлением применяемого кабеля (от 100 до 120 Ом).
Формирователи и приемники, соответствующие требованиям стандарта EIA RS-485, сохраняют работоспособность при воздействии на них синфазного напряжения в диапазоне от минус 7 до плюс 7 В (мгновенное значение). Синфазное напряжение определяется совокупностью нескомпенсированных разностей потенциалов земли приемников и формирователей, максимальным значением напряжения помех, измеренного между землей приемника и жилами кабеля, соединенными с землей на передающей стороне линии связи, а также максимальным значением напряжения смещения выходов формирователей (Uos). Если значение разности потенциалов между землями выходит за пределы допустимого диапазона, то при реализации сети на основе интерфейса RS-485 следует применять приемопередатчики с гальванической изоляцией. Один из возможных способов объединения формирователей и приемников с гальванической изоляцией показан на рис. 5.1.
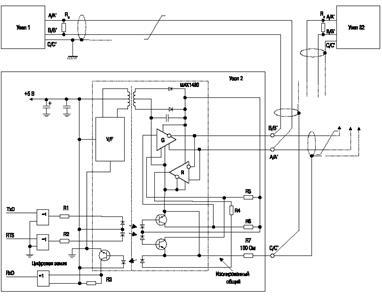
Рис. 5.1. Один из возможных способов объединения формирователей и приемников с гальванической изоляцией.
Разработчик системы на базе данных приемников и формирователей должен учитывать возможность возникновения ситуации, когда все формирователи окажутся переведенными в пассивное состояние. В этом случае ни один приемник не будет распознавать какого-либо устойчивого логического состояния. Если переводу всех формирователей в пассивное состояние предшествовал сеанс информационного обмена, то логическое состояние на выходе всех приемников будет соответствовать последнему принятому биту информации. Для разрешения указанной проблемы разработчиком должны быть предприняты специальные меры. В частности, приемопередатчики многих производителей оснащены цепями смещения выхода формирователя, показанными на рис. 5.2. При этом после перевода всех формирователей, входящих в состав сети, в пассивное (высокоимпедансное) состояние в линии связи будет поддерживаться уровень, соответствующий состоянию OFF (ВЫКЛЮЧЕН). Для снижения потребления тока, протекающего по цепям смещения и согласующему резистору, последовательно с согласующим резистором может быть включен конденсатор емкостью 0,1 мкФ.

Рис. 5.2. Цепь смещения выхода формирователя.
5.3 Средства объединения устройств системы
Средства объединения устройств включают в себя кабельную продукцию, соединители и согласующие резисторы и будут называться далее средствами связи. Поскольку реальная конфигурация средств связи зависит от требований, обуславливаемых конкретным приложением и не установленных стандартом EIA RS-485, далее приводится ряд указаний по выбору средств связи. Данные указания выработаны, исходя из предположения, что для подключения устройств к линии связи не применяются элементы ответвления.
Основными параметрами, определяющими критерии выбора кабеля, являются:
– скорость обмена, значение которой определяет длительность передаваемого бита информации;
– минимальный уровень сигнала на входе приемника, необходимый для распознавания передаваемых двоичных состояний;
– максимально допустимый уровень искажений сигнала;
– максимальная требуемая протяженность линии связи.
Длительность информационного бита (Tb) определяется минимально допустимым интервалом времени между переходами передаваемых двоичных состояний. Если напряжение сигнала в линии не успевает достичь уровня, соответствующего передаваемому двоичному состоянию до появления следующего перехода, указанный переход появится на входе приемника с некоторым временным сдвигом, который приводит к возникновению межсимвольных искажений. При выборе кабеля должно быть учтено отношение длительности переднего фронта к длительности информационного бита (tr/Tb) в точке подключения наиболее удаленного приемника.
Уровень сигнала, присутствующий на входе приемника, должен быть не менее его порога чувствительности. При этом минимальное значение входного напряжения должно выбираться с запасом в зависимости от интенсивности помех, воздействующих на линию связи и на приемник, допустимой вероятности появления ошибок, а также от допустимого уровня искажений сигнала на входе приемника. Для определения параметров кабеля необходимо задаться минимальным уровнем сигнала на входе самого удаленного приемника с учетом перечисленных факторов.
Искажения сигнала определяются его временным сдвигом относительно положения при передаче в идеальных условиях. Количественно искажения выражаются в процентах от полной длительности информационного бита. При выборе кабеля следует учитывать допустимый уровень искажений на входе приемника, расположенного в самой удаленной точке линии связи.
5.4 Методика выбора кабеля
1. Исходя из требуемого значения скорости обмена, вычислить длительность информационного бита по формуле:

где C — скорость обмена.
2. Задать минимальное напряжение сигнала (U0
), которое должно присутствовать на входе самого удаленного приемника.
3. Задать максимальный допустимый уровень искажений сигнала (δ, %) на входе самого удаленного приемника.
4. Задать максимальное требуемое значение длины кабеля (L, м).
5. Вычислить максимальное допустимое значение омического сопротивления кабеля длиной L по следующей формуле:


где Rl
— полное омическое сопротивление кабеля длиной L; Rc
— сопротивление согласующего резистора, равное волновому сопротивлению кабеля; Uмин
— минимальное напряжение сигнала на выходе формирователя, равное 1,5 В; U0
— минимальное напряжение сигнала, которое должно присутствовать на входе самого удаленного приемника.
6. Вычислить погонное сопротивление кабеля по формуле:


где rk
— погонное сопротивление кабеля.
7. Руководствуясь справочными данными, выбрать кабель, волновое сопротивление которого равно принятому в п. 5, а погонное сопротивление — не более вычисленного в п. 6.
8. Вычислить длительность переднего фронта импульса (время нарастания сигнала от 10% до 90% его максимального уровня), воспользовавшись параметрами выбранного кабеля:


где tr
— длительность переднего фронта сигнала на входе самого удаленного приемника; Ck
— погонная емкость кабеля; Rэкв
— эквивалентное активное сопротивление нагрузки формирователя, определяемое следующим образом:


rk
* — погонное сопротивление выбранного кабеля; L — максимальное требуемое значение длины кабеля; Rвх
— входное сопротивление приемника; Rc
— сопротивление согласующего резистора, равное волновому сопротивлению кабеля; n — предполагаемое количество приемников, подключаемых к кабелю; Zk
— волновое сопротивление кабеля.
9. Установить реальное значение уровня искажений сигнала на входе самого удаленного приемника (δ*) которое определяется отношением длительности переднего фронта сигнала, рассчитанной в п. 8, к полной длительности информационного бита, значение которой установлено в п. 1, а также минимальным напряжением сигнала на входе самого удаленного приемника U0 в соответствии с графиками, приведенными на рис. 15. Если полученный уровень искажений превышает допустимый согласно п. 3, следует повторить выбор кабеля. При этом кабель должен иметь меньшие значения погонного сопротивления и погонной емкости, чем выбранный в п. 7. Если не удается выбрать кабель с лучшими параметрами, следует снизить значение скорости обмена либо сократить протяженность линии связи.

Рис. 5.3. График зависимости уровня искажений сигнала на входе приемника от минимального напряжения сигнала на его входе и от отношений длительности переднего фронта к длительности информационного бита.
Графики, приведенные на рис.5.3, построены, исходя из предположения, что формирователь имеет максимально допустимую степень асимметрии выхода, приемник обладает наихудшей допустимой чувствительностью, а фронты сигнала, распространяющегося по линии связи между самыми удаленными ее точками, имеют форму, близкую к обратной экспоненте. В реальных условиях искажения могут иметь характер, отличный от предположений, использованных при построении графиков.
В реальных условиях разработчику нередко приходится решать обратную задачу, а именно, по имеющимся техническим характеристикам приобретенных приемопередатчиков, требуемой протяженности линии связи и параметрам стандартного кабеля определять максимально возможное значение скорости передачи данных. Рассмотрим конкретный пример.
Пусть требуемая протяженность линии связи составляет 1200 м. В качестве среды обмена предполагается применить неэкранированную витую пару на основе провода МГШВ 0,35. Кроме того, используется приемопередатчик фирмы Octagon Systems типа NIM, построенный на базе интегральной микросхемы MAX1480B. Необходимо определить максимально возможное значение скорости передачи данных.
1. Исходя из предположения, что волновое сопротивление линии связи составляет около 180-200 Ом, а погонная емкость — около 80-100 пФ/м, вычисляем длительность переднего фронта передаваемого бита информации:

Допускаемое отношение длительности переднего фронта к полной длительности передаваемого бита информации MAX1480B составляет 0,5. Таким образом, максимально возможное значение скорости передачи данных лежит в диапазоне, определяемом следующим соотношением:

Откуда следует, что: 105218 бит/c ≤ Cмакс
≤ 126262 бит/c
Если в качестве среды обмена применить кабель типа 9842 фирмы Belden, волновое сопротивление которого составляет 120 Ом, а погонная емкость — 42 пФ/м, то максимально возможное значение скорости передачи будет составлять около 37594 бит/с.
5.5 Расчет надежности
Проектируемая промышленная локальная сеть BitBus монтируется на основе готовых изделий, и время на работки на отказ берется из данных предоставляемых производителем оборудования.
Для «Сервера» и «Клиента» время наработки на отказ по  часов часов

Для ССД и Табло по  часов часов

Для платы BB_ISA (Micro TCX)  часов часов

Интенсивность отказов разъемов RS-485 
Общая интенсивность отказов:

Среднее время наработки системы на отказ:
 часов часов
В рассмотренной сети в целях профилактики проводится ежедневное техническое обслуживание (ЕТО). Рассчитаем надежность работы сети между двумя ЕТО 24 часа.

Такое время безотказной работы системы считается удовлетворительным, следовательно, дополнительных мер по обеспечению надежности не требуется.
5.6 Влияние среды обмена
Разработчик системы передачи данных должен учитывать тот факт, что на качество ее функционирования могут оказывать влияние такие эффекты, как помехи, наведенные на линию связи, разность потенциалов земли в местах размещения технических средств системы, активные и реактивные потери мощности, а также отражения, которые могут иметь место при высоких скоростях обмена. Степень влияния электромагнитных помех и разности потенциалов земли зависит от условий, в которых функционирует система, и ее эффективность определяется многими факторами, в том числе сбалансированностью или симметрией, описание влияния которой приведено далее. Активные и реактивные потери зависят от качества применяемого кабеля. Отражения являются результатом внесения каждым устройством реактивных составляющих в эквивалентную нагрузку, подключенную к выходу формирователя, находящегося в активном состоянии. При этом реактивные составляющие преимущественно имеют емкостный характер.
Стандарт описывает устройства, способные функционировать в широком диапазоне скоростей обмена (до 10 Мбит/с). Разработчик системы должен учитывать, что даже при невысоких скоростях обмена, например 19,2 кбит/с, длительности переднего и заднего фронтов информационного бита могут составлять не более 10 нс, а приемники могут иметь еще более высокое быстродействие. Таким образом, если не приняты специальные меры, то даже кратковременные помехи могут привести к нарушению целостности потока передаваемых данных, в том числе при низких скоростях обмена.
5.7 Электромагнитные помехи и симметрия параметров канала связи
Устойчивость системы связи к электромагнитным помехам, возникающим в результате наличия паразитных индуктивных или емкостных связей источников помех со средой обмена, отчасти определяется степенью асимметрии (или дисбаланса) распределенных и сосредоточенных параметров линии связи относительно земли. Интенсивность помехи, действующей между двумя проводниками кабеля, как правило, будет определяться степенью асимметрии полного импеданса относительно земли, если предположить, что источник помехи имеет одинаковую паразитную связь с каждым из проводников. Рассмотрим структуру, состоящую из активного генератора, который расположен в одной из самых удаленных точек линии связи. В противоположной наиболее удаленной точке линии связи располагается несколько приемников и формирователей, пребывающих в пассивном состоянии и представленных в виде эквивалентной мостовой схемы, показанной на рис. 5.4. Поскольку формирователь в активном состоянии имеет малое выходное сопротивление, на низких частотах можно считать, что синфазная составляющая помехи прикладывается к каждому входу эквивалентной мостовой схемы приемника через сопротивление Rs/2, как показано на рис. 5.4.

Рис. 5.4. Эквивалентная схема связи при воздействии синфазной помехи.
RS
— на высоких частотах — волновое сопротивление кабеля, на низких частотах — полное омическое сопротивление кабеля;
Za
, Zb
, Zc
— полные импедансы совокупности приемников, представленных в виде мостовой эквивалентной схемы;
Ei
— напряжение помехи общего вида;
En
— приведенное ко входу напряжение противофазной составляющей помехи.
Для указанной эквивалентной схемы степень асимметрии определяется отношением интенсивности помехи общего вида Ei к напряжению помехи En, наведенной между проводниками кабеля на входе эквивалентной схемы приемника:


Отношение Ei/En определяется следующей формулой (промежуточные вычисления опущены):
,
где Yx
=1/Zx
, Gs
=1/Rs
.
Пусть Yb
- Ya
= Yd
. Кроме того, исходя из практических соображений, можно считать, что (Ya
, Yb
, Yc
) << Gs
. Тогда степень асимметрии приближенно выражается следующей формулой:
Таким образом, степень асимметрии обратно пропорциональна сумме разностей полных (комплексных) проводимостей между каждой входной клеммой каждого приемника и землей и не зависит от полной синфазной проводимости входа приемника относительно земли (Ya
+Yb
). Симметрия канала наиболее существенна в области высокочастотных составляющих передаваемого сигнала, которые лежат в полосе пропускания приемника.
Разница значений емкости между каждой входной клеммой прием ника и землей, составляющая всего лишь несколько пикофарад, может привести к значительной асимметрии канала, если применяемый приемник имеет полосу пропускания порядка сотен МГц. Например, для 10 приемников, подключенных к кабелю, волновое сопротивление которого составляет 120 Ом, наличие разности емкостей между входными клеммами каждого из них и землей, равной 10 пФ, приведет к асимметрии канала на частоте 10 МГц, составляющей около 10 дБ. На более высоких частотах (например, 50 МГц) конфигурация системы будет аналогична однопроводной с общим обратным проводом, которая лежит в основе интерфейса RS-232-C. В связи с изложенным настоятельно рекомендуется использовать экранированную витую пару, что обеспечивает как симметрию линии связи, так и повышение устойчивости к электромагнитным помехам.
5.8 Дополнительные требования к реализации заземления
Для правильного функционирования цепей формирователя и приемника при обмене данными единицы оборудования системы должны иметь путь возврата сигнала между цепями заземления на приемной и передающей сторонах. Цепь заземления может быть выполнена путем непосредственного присоединения общих каждого устройства к точкам, имеющим нулевой потенциал. Указанный способ допустим только при гарантированном равенстве потенциалов земли в местах размещения единиц оборудования системы. Кроме того, цепь заземления может быть реализована при помощи дренажного проводника, который имеется внутри кабеля передачи данных, как показано на рис. 5.5. При реализации цепи сигнального заземления вторым способом соединение третьего (дренажного) проводника с сигнальным общим проводом каждого устройства должно быть выполнено через резистор небольшого сопротивления, например 100 Ом, который предназначен для ограничения блуждающих токов, когда в целях безопасности применяются другие цепи заземления.

Рис. 5.5. цепь заземления реализованая при помощи дренажного проводника.
В ряде случаев для повышения устойчивости к помехам электрического (не магнитного) характера применяется экранированный кабель передачи данных. При его использовании экран должен быть соединен с корпусом оборудования только в одной из двух наиболее удаленных точек размещения технических средств системы. Реализация второго варианта допустима только при гарантированном равенстве потенциалов земли в местах размещения единиц оборудования системы. Требования к средствам присоединения экрана кабеля стандартом EIA RS-485 не устанавливаются.
Способ реализации цепей заземления при использовании приемопередатчиков с гальванической изоляцией показан на рис. 5.1.
5.9 Конфликтные ситуации
Если к линии связи подключены два формирователя или более, то возможна ситуация их одновременного перехода в активное состояние. В случае, когда один формирователь в активном состоянии является источником, а второй — потребителем тока, может произойти чрезмерный разогрев компонентов выходных каскадов формирователей. Подобная ситуация носит название конфликтной. Поскольку требования к системе могут предопределять возможность одновременного перехода в активное состояние более чем одного формирователя, условия испытаний согласно п.3.4.2 стандарта EIA RS-485 установлены с учетом ограничения максимальной мощности, рассеиваемой компонентами выходного каскада формирователей.
Конфликтные ситуации могут возникать по следующим причинам.
1. Включение питания системы.
2. При включении питания системы либо при повторном включении после кратковременного отключения несколько формирователей (или все) в процессе инициализации могут пребывать в активном состоянии.
3. Неисправность системы.
4. Возникновение неисправности системы или сбой программного обеспечения могут привести к переводу нескольких формирователей в активное состояние.
5. Использование протокола обмена, допускающего осуществление попыток одновременного доступа к каналу связи со стороны нескольких устройств. Некоторые протоколы обмена могут содержать процедуры доступа к каналу связи, предусматривающие перевод нескольких формирователей в активное состояние на короткие интервалы времени. Однако, в конечном счете, канал предоставляется одному устройству, что обеспечивает разрешение конфликтной ситуации.
Механизмы возникновения неисправности формирователя показаны на рис. 5.6. и рис. 5.7.

Рис. 5.6. Конфликтная ситуация, вызванная одновременной активацией двух формирователей.
На рис. 5.6. изображены выходные цепи двух формирователей, присоединенные к общей линии связи. Ток короткого замыкания будет протекать через открытое верхнее плечо формирователя A и открытое нижнее плечо формирователя B. При наличии разности потенциалов между землями формирователей, лежащей в диапазоне от минус 7 до плюс 7 В, мощность, рассеиваемая формирователем A, может превысить предельно допустимое значение. Например, если предельно допустимый ток нагрузки формирователя A составляет 250 мА, а разность потенциалов между землями формирователей — 7 В, то рассеиваемая мощность будет составлять около 3 Вт.
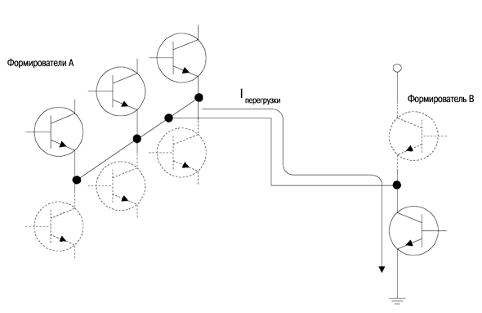
Рис 5.7. Конфликтная ситуация, вызванная одновременной активацией нескольких формирователей.
Ситуация, когда несколько формирователей нагружено на один, иллюстрируется рис. 5.7. По нижнему плечу формирователя В протекает суммарный ток от нескольких формирователей A, что может привести к его выходу из строя за счет увеличения напряжения насыщения (коллектор-эмиттер) и соответствующего роста рассеиваемой мощности. Таким образом, формирователь должен быть оснащен средствами защиты, предотвращающими выход из строя по описанным ранее причинам.
Наиболее очевидными решениями указанной задачи являются:
· введение элементов ограничения тока;
· реализация тепловой защиты формирователя.
При использовании ограничителей тока уменьшается рассе иваемая мощность и после разрешения конфликтной ситуации работоспособность устройства мгновенно восстанавливается. В случае же применения тепловой защиты при ее срабатывании время восстановления формирователя значительно возрастает. Таким образом, предпочтительно реализовывать тепловую защиту таким образом, чтобы ее порог срабатывания был близок к предельно допустимому значению тока, протекающего по цепям выходного каскада формирователя. Совместно с тепловой защитой рекомендуется устанавливать в выходных цепях формирователя элементы ограничения тока, функция которых состоит вснижении рассеиваемой мощности при протекании тока, незначительно превышающего номинальный.
Конфликтные ситуации, сопровождаемые протеканием по линии большого тока, приводят к тому, что в линии связи запасается реактивная энергия. При резком снижении тока происходит всплеск напряжения, интенсивность которого определяется формулой:

где U — амплитуда всплеска напряжения; Iкз
— суммарный ток короткого замыкания, протекавшего в линии при конфликтной ситуации; Zk
— волновое сопротивление линии связи.
Разработчик системы должен предусматривать возможность возникновения всплесков напряжения, амплитуда которых существенно превышает установленное стандартом значение (25 В). Указанные всплески могут быть вызваны кратковременными мощными помехами, возникающими при коммутации силового оборудования, а также атмосферными разрядами. Схема подключения устройства подавления импульсных помех показана на рис. 5.8. При реализации внешних цепей защиты приемопередатчиков следует учитывать тот факт, что каждое установленное устройство подавления выбросов напряжения в линии связи вносит емкость, эквивалентную емкости кабеля длиной около 120 м.

Рис. 5.8. Схема подключения устройства подавления импульсных помех.
6. Организационно-экономическая часть
6.1 Технико-экономическое обоснование целесообразности проектирования сети BitBus
В данном дипломном проекте рассмотрены вопросы создания локальной промышленной сети BitBus с использованием витой пары и Wi-Fi технологии для автоматизации технологических процессов.
На современном этапе развития и использования локальных промышленных сетей наиболее актуальное значение приобрели такие вопросы, как оценка производительности и качества локальных промышленных сетей и их компонентов, оптимизация уже существующих или планируемых к созданию промышленных компьютерных сетей. Сейчас, когда промышленные компьютерные сети стали определяющим компонентом в информационной стратегии большинства предприятий, недостаточное внимание к оценке мощности локальной вычислительной сети и ее планированию привело к тому, что сегодня для поддержки современных приложений в архитектуре клиент-сервер многие сети необходимо заново проектировать, а во многих случаях и заменять.
Производительность и пропускная способность промышленных локальных сетей определяется рядом факторов:
- выбором кабельной системы, серверов и рабочих станций,
- каналов связи,
- сетевого оборудования,
- сетевых операционных систем и операционных систем рабочих станций,
- распределением информации в сети,
- организацией распределенного вычислительного процесса, а также защиты и поддержания и восстановления работоспособности в ситуациях сбоев и отказов и т.п.
Реализация данного проекта, произведенная с учетом всех вышеперечисленных факторов, позволит сократить время анализа всевозможных нештатных ситуаций, бумажный документооборот внутри промышленных предприятий, повысить производительность труда, сократить время на получение и обработку информации, выполнять точный и полный анализ данных, обеспечивать получение любых форм отчетов по итогам работы. Как следствие, образуются дополнительные временные ресурсы для разработки и реализации новых проектов.
Задачи разработки промышленной локальной сети и пути её решения представлены на рисунке 20 в виде «дерева целей».
6.2 Организационная часть
Для работ, связанных с проектированием и монтажом промышленной локальной сети BitBus необходим коллектив, рабочих и ИТР.
6.2.1 Состав группы разработчиков и должностные оклады
Для выполнения поставленной задачи необходимо определить уровень новизны и сложности проекта и составить штатное расписание проектной группы.
Исходя из справочно-нормативной литературы, разработку промышленной компьютерной сети можно отнести к 3 категории сложности и к группе новизны "Б" - конструирование, требующее экспериментальной проверки всех составных частей или технических решений и их взаимодействия в заданных параметрах.
Для выполнения полного объема работ (от подготовительного этапа до приема работы, см. табл.8) необходима проектная группа, представленная в таблице 6.1.
Таблица 6.1. Штатное расписание.
| Категория работников |
Кол-во работающих, чел. |
Должностной оклад,
руб./мес.
|
| Ведущий инженер |
1 |
13000 |
| Инженер-программист |
1 |
10000 |
| Техник |
1 |
7000 |
| Итого: |
3 |
30000 |
Данные взяты в ЗАО ПГО «Тюменьпромгеофизика».
6.2.2 Перечень основных этапов разработки локальной промышленной сети BitBus
Проектирование происходит в несколько этапов, в которых принимает участие не только состав группы разработчиков, но и монтажники, обеспечивающие монтаж витой пары. Все этапы работ приведены в таблице 6.2.
Таблица 6.2. Перечень основных этапов работ.
| Этап |
Содержание работ,
входящих в этап
|
Вид отчетности
по законченной работе
|
Кол-во исполнителей, чел. |
Должность |
Продолжи
тельность работы, дни
|
| 1 |
2 |
3 |
4 |
5 |
6 |
Подготовительный
Анализ
требований
|
1.Ознакомление с заданием
на проект
|
Пояснительная
записка
|
1 |
Ведущий инженер |
1 |
| 2.Подбор и изучение научно-технической и патентной литературы |
| 1 |
Инженер-программист |
11 |
| 3.Согласование и утверждение ТЗ |
Техническое
задание
|
1 |
Ведущий
инженер
|
14 |
Технический
проект
|
1.Оценка и подбор
оборудования и комплектующих
2. Написание
расчетов по проекту
|
Отчет по ТП |
1 |
Ведущий
инженер
|
15 |
| 1 |
Инженер-программист |
12 |
| Монтаж |
Монтаж кабеля и
сетевого
оборудования
|
Технологическая документация |
2 |
Монтажник |
10
10
|
Тестирование системы
|
Проверка системы на
работоспособность
|
Акт тестирования |
2 |
Техник |
7 |
Уточнение
технической
документации
|
Корректировка
техдокументации
и оформление полного комплекта техдокументации
|
Комплект
технической
документации
|
1 |
Инженер-программист |
5 |
| Прием работ |
Оценка качества
работ
|
Заключение
экспертной комиссии
|
1 |
Ведущий
инженер
|
2 |
| 1 |
Инженер-программист |
3 |
| Итого: |
90 |
В том числе:
|
Ведущий инженер: |
32 |
| Инженер программист: |
31 |
| Техник |
7 |
6.2.3 Смета затрат на разработку локальной промышленной сети
Принимая за основание данные, приведенные в таблице 6.2. рассчитаем смету затрат на работы по следующим статьям затрат:
1. Затраты на материалы (бумага А4 5 пачек - 1000 руб.; канцелярские принадлежности - 600 руб.; техническая литература -1900 руб.) составляют 3500 руб.
2. Расчет затрат на заработную плату ИТР (представлен в таблице 6.3.)
Таблица 6.3. Расчет затрат на з/п ИТР
| Должность |
Оклад,
руб./мес
|
Оплата руб/день |
Продолжительность работ, дни |
Итого, руб. |
| Ведущий инженер |
13000 |
1281,8 |
32 |
10931,20 |
| Инженер-программист |
10000 |
902,7 |
31 |
7712,80 |
| Техник |
7000 |
681,8 |
7 |
1414,00 |
| Итого по тарифу: |
20058 |
| Доплаты (40% от тарифа): |
8023,20 |
| Итого основная заработная плата: |
28081,20 |
| Дополнительная заработная плата (20% от основной): |
5616,24 |
| Единый социальный налог (26% от суммы основной и дополнительной з/п) |
8761,33 |
3. Производственные командировки - 20%
от основной заработной платы:  руб. руб.
4. Контрагентские расходы - 25%
от основной заработной платы:  руб. руб.
5. Прочие денежные расходы - 100%
от основной заработной платы:  руб. руб.
Полученные данные сводим таблицу 6.4.
Таблица 6.4. Смета затрат на разработку проекта.
| №п/п |
Затраты по элементам |
Сумма, руб. |
| 1 |
Материалы |
3500 |
| 2 |
Заработная плата разработчиков (ИТР) |
28081,20 |
| 3 |
Дополнительная заработная плата |
5616,24 |
| 4 |
Единый социальный налог |
8761,33 |
| 5 |
Производственные командировки |
5616,24 |
| 6 |
Контрагентские расходы |
7020,30 |
| 7 |
Прочие денежные расходы |
28081,20 |
| Итого: |
86676,51 |
6.3 Экономическая часть
В экономической части рассчитывается полная себестоимость промышленной локальной сети BitBus по следующим статьям затрат:
6.3.1 Затраты на основные и вспомогательные материалы
Для монтажа промышленной сети используются Profibus cable AWG22 3079A, Разъемы RS-485, а также витая пара категории 5е.
Данные по ценам на эти материалы формируются в основном на договорной основе и обговариваются на подготовительном этапе. В таблице 6.5. приведен расчет затрат на основные и вспомогательные материалы, используемые при монтажной работе.
Таблица 6.5. Расчет затрат на основные и вспомогательные материалы, используемые при монтажной работе
| Наименование материала |
Единицы измерения |
Кол-во |
Стоимость
единицы,
руб.
|
Общая
стоимость
материала, руб.
|
| UNITRONIC BUS FD P LD |
м |
300 |
71,88 |
21564 |
| Витая пара кат. 5 |
м |
300 |
8,37 |
2511 |
| Разъемы RS-485 |
шт. |
10 |
30 |
300 |
Итого:
Основные материалы:
Вспомогательные материалы (25% от основных):
|
24375 |
| 6093,75 |
| Итого за основные и вспомогательные материалы: |
30468,75 |
| Транспортно-заготовительные расходы (20% от суммы расходов на основные и вспомогательные материалы): |
6093,75 |
| Итого затраты на основные и вспомогательные материалы с учетом транспортно-заготовительных расходов: |
36562,50 |
6.3.2 Затраты на покупные комплектующие изделия
Затраты на комплектующие для промышленной сети представлены в таблице 6.6.
Таблица 6.6. Затраты на комплектующие ЛВС
| Наименование комплектующих |
Тип, марка |
Кол-во |
Стоимость единицы, руб |
Общая стоимость, руб. |
| ССД |
НОКБ |
2 |
27500 |
55000 |
| МЕГА-Табло |
НОКБ |
2 |
17500 |
35000 |
| 8 канальное табло |
НОКБ |
1 |
12500 |
12500 |
| Коммутатор |
D-Link DES-1008D/E |
2 |
567 |
1134 |
| сервер |
HP ProLiant DL380 G3 |
1 |
17500 |
17500 |
| ИБП |
АРС Smart-UPS RM 2U |
2 |
12000 |
24000 |
| Радиомодем DWL-G510 |
D-Link |
1 |
705 |
705 |
| Точка доступа DWL-7100AP |
D-Link |
1 |
3832 |
3832 |
| Итого: |
149671 |
| Транспортно-заготовительные расходы (20% от общей суммы): |
29934,2 |
| Всего: |
179605,2 |
6.3.3 Расчет заработной платы монтажников, занятых монтажом
промышленной сети.
Расчет заработной платы монтажников, занятых монтажом промышленной сети, представлен в таблице 6.7.
Таблица 6.7. Расчет заработной платы монтажников
| Вид работы |
Трудоемкость, час. |
Часовая тарифная ставка, руб./час |
Итого зарплата, руб. |
| Протяжка кабелей |
76 |
72 |
5472 |
| Монтаж разъёмов |
12 |
72 |
864 |
| Установка оборудования |
80 |
72 |
5760 |
| Итого тарифная заработная плата: |
12096 |
| Доплата (50% от тарифной заработной платы): |
6048 |
| Итого основная заработная плата: |
18144 |
| Дополнительная заработная плата (18% от основной зарплаты): |
3265,92 |
| Основная и дополнительная заработная плата: |
21409,92 |
| Единый социальный налог (26% от основной и дополнительной з/п) |
5566,58 |
6.3.4 Расчет себестоимости монтажа промышленной сети
Результаты расчетов отдельных статей затрат, включаемых в стоимость монтажа промышленной сети, представлены в таблице 6.8.
Таблица 6.8. Результаты расчетов отдельных статей затрат
| №п/п |
Наименование статей затрат |
Сумма,
руб.
|
| 1 |
Основные и вспомогательные материалы |
36562,50 |
| 2 |
Комплектующие изделия |
179605,2 |
| 3 |
Основная заработная плата монтажников |
18144 |
| 4 |
Дополнительная заработная плата монтажников |
3265,92 |
| 5 |
Единый социальный налог |
5566,58 |
| 6 |
Общепроизводственные расходы (120% от основной 1 заработной платы монтажников) |
21772,80 |
| Итого: |
264917 |
6.3.5 Расчет капитальных на проектирование и монтаж ЛВС
Общая смета затрат на проектирование и монтаж промышленной сети рассчитывается по следующей формуле:
Кдоп
= Зокр
. + Сполн.пром,
Где Кдоп
дополнительные капитальные затраты
Зокр.
= 86676,51 руб.
Сполн.пром
= 264917,00 руб.
Кдоп
= 86676,51 + 264917,00 = 351593,51 руб.
6.4 Расчет экономической эффективности проектируемой промышленной сети
По оценке зарубежных специалистов в области автоматизации управления, автоматизация работы служащих в условиях коммерческих предприятий с направлением работы в информационные технологии может сократить общие расходы на конторскую деятельность примерно на 25%. Однако, наиболее важной целью автоматизации работы служащих является повышение качества административных решений (качество вырабатываемой информации).
Источниками экономической эффективности, возникающей от применения компьютеров в промышленной сети, являются:
- уменьшение затрат на обработку единицы информации;
- повышение точности расчетов;
- увеличение скорости выполнения вычислительных и печатных работ;
- способность автоматически собирать, запоминать и накапливать разрозненные данные;
- систематическое ведение баз данных;
- уменьшение объемов хранимой информации и стоимости хранения данных;
- стандартизация ведения документов;
- существенное уменьшение времени поиска необходимых данных;
- улучшение доступа к архивам данных;
- возможность использования вычислительных сетей при обращении к базам данных.
При анализе эффективности промышленной сети важно учитывать, что конечный эффект от их применения связан не только с возмещением затрат на покупку, монтаж и эксплуатацию оборудования, а в первую очередь, за счет дополнительного улучшения качества принимаемых решений.
Экономическая эффективность информационных процессов определяется соотношением затрат на технические средства и на заработную плату работников с результатами их деятельности. Известен ряд подходов к определению основных составляющих эффекта информационной деятельности. В основу этих понятий положены понятия информационной продукции (различные виды информации), информационного эффекта, величины предотвращения потерь, общественно необходимого уровня информированности и другие.
Затраты на разработку, закупку комплектующих и монтаж промышленной сети носят единовременный характер и при расчете эффективности учитываются вместе с дополнительными капитальными затратами.
При расчете может быть принята такая модель внедрения промышленной сети - до внедрения проекта автоматизированные функции выполнялись программистами вручную (в этом случае эффект достигается за счет увеличения производительности труда, снижения численности программистов, снижения затрат на аренду помещений для размещения программистов; необходимо произвести полные затраты, на приобретение комплекта технических средств)
Годовая экономическая эффективность рассчитывается по формуле:
  , ,
где Эпр
-
годовой прирост прибыли после внедрения проекта,
Ен
-
нормативный коэффициент экономической эффективности капитальных вложений (для автоматизированных систем управления и проектирования Ен
= 0,33)
Кдоп
- полные единовременные затраты на создание запроектированной системы.
Кдоп
=
351593,51 руб.
Эпр
=П2
– П1,
где П1
, П2
-
чистая годовая прибыль до (1)и после (2) внедрения разрабатываемой системы.
 -
годовой прирост прибыли после внедрения проекта. -
годовой прирост прибыли после внедрения проекта.

Окупаемость дополнительных капитальных вложений рассчитываем по формуле:
 года года
Результаты расчетов сводим в таблицу:
6.4.1 Технико-экономические показатели
Технико-экономические показатели представлены в таблице 6.9.
Таблица 6.9. Технико-экономические показатели
| № п/п |
Наименование показателей |
Единицы измерений |
Проект |
| 1 |
Скорость передачи данных |
Мбит/сек |
До 10 Мбит/сек |
| 2 |
Топология |
-//- |
линейная |
| 3 |
Среда передачи данных |
-//- |
Витая пара (медь) |
| 4 |
Сетевая ОС |
-//- |
Microsoft Windows 2000 |
| 5 |
Дополнительные капитальные вложения |
руб. |
351593,51 |
| 6 |
Годовая прибыль |
руб/год. |
283787,00 |
| 7 |
Годовая экономическая эффективность |
руб. |
167761,14 |
| 8 |
Срок окупаемости Кдоп
|
год |
2,10 |
6.5 Вывод
Исходя из такого срока окупаемости, можно сказать, что проект промышленной локальной сети экономически эффективен для данной компании.
7. Безопасность и экологичность проектных решений
7.1 Цель и решаемые задачи
В данном дипломном проекте решаются вопросы создания и эксплуатации промышленной локальной сети BitBus. Так как ПЭВМ служит выполнения должностных обязанностей течении 24 часов, т.е круглосуточно поэтому целесообразно рассмотреть вопросы, связанные с обеспечением безопасности труда и сохранением работоспособности персонала именно при работе с ПЭВМ. В данном разделе будут освещены воздействия вредных и опасных факторов производственной среды электромагнитных полей, статического электричества, недостаточной освещенности и психо-эмоционального напряжения. Также будут приведены пути решения этих проблем, стандарты и рекомендации по нормированию.
7.2 Опасные и вредные факторы при работе с ПЭВМ
При работе с ПЭВМ могут возникнуть потенциально опасные и вредные факторы, воздействие которых на организм человека может принести ему вред и привести к травматизму.
Основные факторы с возможными последствиями изложены в ГОСТ 12.1.003-74/80 и сведены в таблицу 7.1.
Таблица 7.1. Основные опасные и вредные факторы.
| n/n |
Наименование фактора |
Возможные
последствия
|
| 1 |
Повышенное значение напряжения электрической цепи |
Электротравма |
| 2 |
Электрическая дуга |
Ожоги, пожар |
| 3 |
Повышенная напряженность электрического поля и электромагнитного излучения |
Нарушение ЦНС, и сердечно-сосудистой системы, утомляемость, раздражительность, помутнение хрусталика |
| 4 |
Повышенный уровень статического электричества |
Пожар, взрыв, электрический удар |
| 5 |
Повышенная или пониженная температура воздуха, влажность, подвижность воздуха рабочей зоны |
Перегрев или переохлаждение организма |
| 6 |
Недостаточная освещенность рабочей зоны |
Утомляемость, дискомфорт, опасность травматизма, ухудшение зрения |
| 7 |
Повышенный уровень шума |
Нервно-психическая перегрузка, заболевания органов слуха |
| 8 |
Монотонность труда |
Нервно-психическая перегрузка |
| 9 |
Умственное перенапряжение; |
Изменение функционального состояния ЦНС |
| 10 |
Повышение уровня химических веществ |
Раздражающе действует на ЦНС, блокирование гемоглобина, нарушение тканевого дыхания, общетоксическое, канцерогенное действие на организм человека. |
7.3 Характеристика объекта исследования
В данном разделе дипломного проекта я освещаю основные вопросы техники безопасности труда и экологии при создании и эксплуатации промышленной компьютерной сети BitBus.
При разработке проекта необходимо предусмотреть мероприятия по обеспечению безопасности и жизнедеятельности. Главным объектом при разработке промышленной компьютерной сети является рабочее место оператора, где выполняются работы по контролю над технологическими процессами, подготовка технической документации и обработке информации и оттуда выдаётся информация на все остальные компьютеры.
Так как пользователи (операторы) в процессе работы значительное время будут проводить за ПЭВМ то актуально выбрать предметом исследования, для обеспечения безопасных и экологических условий труда пользователей, вредные факторы воздействия ПЭВМ на человека.
Для работы с промышленной компьютерной сетью в моей квалификационной работе я использую следующую конфигурацию оборудования:
Системный блок типа: процессор – Intel Pentium IV 2.8ГГц, OЗУ-512Mb, HDD-80Гб, материнская плата Intel D845 EGEW, DVD-Rom 48x, интегрированная звуковая карта (общее количество системных блоков – 10шт.), оснащенных мониторами LCD LG 117s 17’’ (общее количество мониторов – 10шт.).
В рабочем помещении оператора находиться все необходимое для рабочего процесса оборудование: 4 персональных компьютера и 2 принтер. Именно это оборудование может служить источником возникновения вредных и опасных факторов.
7.4 Мероприятия по безопасности труда и сохранению работоспособности.
7.4.1 Обеспечение требований эргономики технической эстетики
Планировка помещения, размещение оборудования
Для обеспечения санитарно-гигиенических условий труда проектом предусмотрено следующее:
Размеры рабочей части помещения составляют:
- длина 
- ширина 
- высота  
- общая площадь равна 
В помещении работают 4 сотрудника в дневную смену и 4 в ночную.

Теперь рассчитываю удельную площадь (Пуд.) приходящегося на одного человека по формуле:

где  - площадь помещения; - площадь помещения;
 - площадь помещения занятого крупногабаритным оборудованием и мебелью; - площадь помещения занятого крупногабаритным оборудованием и мебелью;
 - число человек, одновременно работающих в помещениях. - число человек, одновременно работающих в помещениях.
 м2 м2
По нормативным требованиям площадь помещений для работников при использовании LCD мониторов следует предусматривать величиной 4,5 м2, для мониторов с ЭЛТ 6 м2 из расчета на одного человека с учетом максимального числа одновременно работающих в смену. Следовательно, нормативные требования сходятся с нашими расчетами, СанПиН 2.2.2./2.4.1340-03
Эргономические решения и организация рабочего места пользователей ПЭВМ
Требования к организации и оборудованию рабочего места пользователя ПЭВМ приведены в ГОСТ 12.2.032-78 и СанПиН 2.2.2.542-96, СанПиН 2.2.2./2.4.1340-03.
Высота рабочей поверхности стола для пользователей должна регулироваться в пределах 680-800 мм; при отсутствии таковой возможности высота рабочей поверхности стола должна составлять 725 мм.
Модульными размерами рабочей поверхности стола для ПЭВМ, на основании которых должны рассчитываться конструктивные размеры, следует считать:
ширину-800, 1200, 1400 мм
глубину-800 или 1000 мм
высоту (при нерегулируемой)-725 мм.
Рабочий стол должен иметь пространство для ног высотой не менее 600 мм, шириной - не менее 500 мм, глубиной на уровне колен - не менее 450 мм и на уровне вытянутых ног - не менее 650 мм.
Рабочий стул (кресло) должен быть подъемно-поворотным и регулируемым по высоте и углам наклона сидения и спинки, а также расстоянию спинки до переднего края сидения.
Клавиатуру следует располагать на поверхности стола на расстоянии 100-300 мм от края, обращенного к пользователю, или на специальной регулируемой по высоте рабочей поверхности, отделенной от основной столешницы.
Конструкция применяемой клавиатуры выбиралась, исходя из следующих нормативных параметров:
- конструкция выполнена в виде отдельного устройства с возможностью свободного перемещения;
- опорное приспособление, позволяет изменять угол наклона
поверхности клавиатуры в пределах от 5 до 15 градусов;
- высота среднего ряда клавиш 25 мм;
- заводское исполнение часто используемых клавиш выполнено в центре, внизу и справа, а редко используемых - вверху и слева;
- выделение цветом, размером, формой и местом расположения
функциональных групп клавиш;
- оптимальный размер клавиш - 15 мм;
- клавиши с углублением в центре и шагом 19 плюс-минус 1 мм;
- расстояние между клавишами 3 мм;
- одинаковый ход всех клавиш с максимальным сопротивлением нажатию 1,5 Н;
- звуковая обратная связь включения клавиш с регулировкой
уровня звукового сигнала. Возможностью ее отключения.
Корпус ВДТ и ПЭВМ, клавиатура и другие блоки и устройства ПЭВМ имеют матовую поверхность одного цвета с коэффициентом отражения 0,5 и не имеют блестящих деталей, способных вызывать блики.
Решения, относящиеся к области технической эстетики, должны быть основаны на рекомендациях СН-181-70 по цветовому оформлению помещения. При выборе цветового оформления помещения необходимо учесть психофизиологическое влияние цвета на центральную нервную систему и орган зрения человека, оптико-физическое воздействие, основанное на отражающей способности цвета и эстетическое восприятие, обусловленное гармоничным сочетанием разных цветов.
При цветовом оформлении помещения необходимо учесть ориентацию окон в отношении сторон света и характер искусственного освещения. У данного помещения окна ориентированы на запад, стены – светло-желтые или голубовато-зеленые, а пол зеленый или красновато-оранжевый. Потолок во всех помещениях белого цвета. Параметры цветового оформления помещений приведены в таблице 7.2.:
Таблица 7.2. Параметры цветового оформления помещений
| Ориентация окон помещений |
Наименование цвета (поверхности) |
Характеристика цветов |
N образца
CH 181-70
|
| длина волны, нм |
чистота |
коэффициент
отражения, %
|
| Запад |
Светло-желтый (стены) |
572 ± 5 |
47 ± 10 |
70 ± 7 |
5,4 |
| Голубовато-зеленый (стены) |
515 ± 5 |
10 ± 5 |
67 ± 7 |
9,4 |
| Зеленый (пол) |
550 ± 5 |
30 ± 10 |
29 ± 7 |
7,1 |
| Красновато-оранжевый (пол) |
600 ± 7 |
50 ± 5 |
10 ± 7 |
18,1 |
Выбор образцов цвета для отделочных материалов и изделий следует осуществлять с учетом фактуры: поверхности в помещениях должны иметь матовую и полуматовую фактуру для исключения попадания отраженных бликов в глаза работающего.
7.4.2 Обеспечение оптимальных параметров воздуха рабочих зон
Нормирование параметров микроклимата
Один из факторов воздействия окружающей среды - микроклиматические условия. Источником неблагоприятных микроклиматических условий являются:
- пыль
- трущиеся механические части внешних устройств ЭВМ
- бумаги для принтеров и картриджи
- высокая температура внешних устройств ЭВМ (мониторы, принтеры)
- плохая работа кондиционеров.
Параметры микроклимата (температура в °С, относительная влажность в % и подвижность воздуха в м/с) нормируются по СанПиН 2.2.4.548-96”. Оптимальные нормы микроклимата приведены в таблице 7.3.
Таблица 7.3. Оптимальные параметры микроклимата с ПЭВМ.
| Период года |
Категория работ |
Температура воздуха в °С не более |
Относительная влажность воздуха, % |
Скорость движения воздуха, м/с |
| Холодный |
Легкая-1б |
21-23 |
40-60 |
0,1 |
| Теплый |
Легкая-1б |
22-24 |
40-60 |
0,2 |
Примечание:
К категории 1б относятся работы, производимые сидя, стоя или связанные с ходьбой и сопровождающиеся некоторым физическим напряжением, при которых расход энергии составляет от 120 до 150 ккал/ч.
В соответствии с СанПиН 2.2.4.548-96 работу операторов можно отнести к работе категории легкая-1б. Таким образом, фактические параметры микроклимата приведены в таблице 7.4.
Таблица 7.4. Фактические параметры микроклимата с ПЭВМ.
| Период года |
Категория работ |
Температура воздуха в °С |
Относительная влажность воздуха, % |
Скорость движения воздуха, м/с |
| Холодный |
Легкая-1б |
22 |
50 |
0,1 |
| Теплый |
Легкая-1б |
23 |
50 |
0,2 |
Из таблиц видно, что фактические параметры микроклимата в помещении соответствуют нормативным.
Нормирование уровней вредных химических веществ
Источниками загрязнения помещения являются вредные вещества внешней среды и более 100 соединений, выделяющихся из строительных материалов здания, мебели, одежды, обуви и биоактивные соединения (антропотоксины) самого человека.
Рассматривая загрязнение помещения вредными веществами внешней среды, необходимо, прежде всего, учитывать местоположение здания, в нашем случае это вагон-дом на территории куста. Наиболее частыми загрязнителями, попадающими из внешней среды в помещение, являются оксид углерода, диоксид азота, диоксид серы, пыль и др.
Мебель, одежда и обувь, хранимая в помещении, выделяют пыль с содержанием минерального волокна, углеводороды, полиэфирные смолы и другие соединения.
К наиболее опасным загрязнителям помещений относятся продукты курения, концентрация которых при большом количестве курящих людей в разное время рабочего дня в десятки раз выше, чем в их отсутствии. Поэтому необходимо организовать специально отведённые места для курения с вентиляцией этих зон.
В таблице 7.5. приведем возможный состав вредных веществ в анализируемом помещении с указанием их предельно допустимых концентраций:
Таблица 7.5. Характеристика вредных веществ, содержащихся в воздухе помещения (ГОСТ 12.1.005-88 и ГН 2.2.5.1313-03)
| Вредные вещества |
ПДК, мг/м3 |
Класс опасности |
Действие на человека |
| 1. Внешние источники (от автострады) |
| Оксид углерода |
20 |
4 |
Блокирует гемоглобин, нарушает тканевое дыхание |
| Диоксид азота |
5 |
2 |
Наркотическое действие, действие на кровеносную систему |
| Свинец (выхлопы автомобилей) |
0,01/0,0070 |
1 |
Общетоксическое, канцерогенное |
| Пыль (сажа) |
4 |
4 |
Раздражающее, канцерогенное |
| 2. Строительные материалы (бетонные конструкции) |
| Радон, торон, полоний, уран |
0,015 |
1 |
Канцерогенное, общетоксическое |
| 3. Мебель, одежда, обувь |
| фенопласты |
6 |
3 |
Общетоксическое, аллергическое, канцерогенное |
| Полиэфирный лак |
6 |
2 |
- |
| Капролактам |
10 |
3 |
- |
| Формальдегид |
05 |
9 |
- |
| Бензол |
5 |
2 |
- |
| Пыль растительного и животного происхождения |
2-6 |
4 |
- |
| 4. Антропоксины |
| Диоксид углерода |
10 |
2 |
Раздражающее, действует на ЦНС |
| Сероводород |
3 |
3 |
- |
| Микробы |
Общетоксическое |
| Клещи |
Аллергическое |
| 5. Продукты курения |
| Никотин |
10 |
3 |
Наркотическое |
Нормирование уровней аэроионизации
Основное применение ионизаторов - создание в помещениях оптимальной концентрации отрицательно заряженных аэроионов, которые необходимы для нормальной жизнедеятельности. Лишенный аэроионов воздух - "мертвый", ухудшает здоровье и ведет к заболеваниям.
В таблице 7.6. приведем согласно СанПиН 2.2.2.542-96 уровни положительных и отрицательных аэроионов в воздухе помещения:
Таблица 7.6. Уровни ионизации воздуха помещений при работе на ВДТ и ПЭВМ
| Уровни |
Число ионов в 1 см. куб. воздуха |
| n+ |
n- |
| Минимально необходимые |
400 |
600 |
| Оптимальные |
1500-3000 |
3000-5000 |
| Максимально допустимые |
50000 |
50000 |
Расчет приточно-вытяжной вентиляции
Расчет воздуха для вентилирования помещений ( ) производиться по формуле: ) производиться по формуле:
 ,где ,где
L - объем приточного воздуха 
с – теплоемкость воздуха (1,005  ) )
р – плотность воздуха (1,2  ) )
 - температура удаляемого воздуха, - температура удаляемого воздуха, 
 - температура воздуха поступающего в помещение, - температура воздуха поступающего в помещение,
 - теплоизбытки, - теплоизбытки, 
Определим количество явного избыточного тепла выделяемого в помещении:
 , где , где
 - выделение тепла от оборудования; - выделение тепла от оборудования;
 - поступление тепла от людей; - поступление тепла от людей;
 - поступление тепла от электрического освещения; - поступление тепла от электрического освещения;
 - поступление тепла от солнечной радиации; - поступление тепла от солнечной радиации;
 , где , где
 - коэффициент использования установочной мощности (0,95); - коэффициент использования установочной мощности (0,95);
 - коэффициент одновременности работы (1); - коэффициент одновременности работы (1);
N – суммарная установочная мощность

 - мощность ПЭВМ потребляемая от сети (350 Вт); - мощность ПЭВМ потребляемая от сети (350 Вт);
к - количество ПЭВМ. Поступление тепла от людей:
 , где , где
n – количество людей, работающих в помещении;
q – количество тепла, выделенного одним человеком (628 кДж/ч).
Поступление тепла от электрического освещения
 , где , где
 - коэффициенты учитывающие способ установки светильников и особенности светильников (0,35 и 1,3); - коэффициенты учитывающие способ установки светильников и особенности светильников (0,35 и 1,3);
N – суммарная установочная мощность светильников, кВт;
 , где , где
 - количество светильников; - количество светильников;
 - мощность одного светильника; - мощность одного светильника;
Тепло, поступающее от солнечной радиации:
 , где , где

q – удельные поступления от солнечной радиации (135  ) )
S – суммарная площадь окон, 
Общее количество избыточного тепла:

Отсюда:
 м3 м3
 где: где:
tp
– температура воздуха в рабочей зоне (tp
=23,5°С);
d – коэффициент нарастания температуры на каждый метр высоты (d=1,5 град/м);
h – высота помещения (h=3,5м).

Объем рабочего пространства вагон-дома  м3 м3

Кратность воздухообмена много больше единицы, следовательно, вентиляция организована правильно.
7.4.3 Создание рационального освещения
Недостаточное освещение оказывает негативное влияние на организм человека. Источником недостаточной освещенности является неправильно спроектированное и выполненное освещение. Основные требования к освещению сформулированы в «Гигиенические требования к видео дисплейным терминалам, персональным электронно-вычислительным машинам и организации работы. Санитарные правила и нормы. СанПиН 2.2.2.542-96”.
Естественное освещение должно осуществляться через светопроемы, ориентированные преимущественно на север и северо-восток и обеспечивать коэффициент естественной освещенности (КЕО) не ниже 1,2% в зонах с устойчивым снежным покровом и не ниже 1,5% на остальной территории.
Освещенность рабочего стола в зоне размещения рабочего документа должна быть 300-500 лк. Допускается установка светильников для подсветки документов. Местное освещение не должно создавать бликов на поверхности экрана и увеличивать освещенность экрана более 300 лк.
Освещенность на рабочем месте должна соответствовать характеру зрительной работы, который определяется следующими тремя параметрами:
- Объект различения - наименьший размер рассматриваемого предмета.
- Фон- поверхность, прилегающая непосредственно к объекту различения.
- Контраст объекта с фоном - характеризуется соотношением яркостей рассматриваемого объекта и СНиП 23-05-95.
В соответствии с СанПиН 2.2.2.542-96 работу оператора можно отнести к работе с малой точностью (наименьший размер объекта различия от 1 до 5 мм) 5-го разряда зрительной работы, с большой контрастностью объекта различения (символов на экране монитора), с темным фоном (подразряд зрительной работы - В).
Недостаточное освещение приводит к напряжению зрения, преждевременной усталости и ослабляет внимание. Чрезмерно яркое освещение вызывает ослепление, раздражение и резь в глазах. Неправильное направление света на рабочее место может создать резкие тени, блики и дезориентировать работающего. Это может привести к профессиональным заболеваниям. Сохранность зрения человека, состояние его центральной нервной системы в значительной мере зависят от условий освещения.
7.4.4 Защита от шума
Одним из наиболее распространенных факторов внешней среды, неблагоприятно воздействующих на организм человека, является шум. Источником являются механические устройства ЭВМ (принтеры и вентиляторы в блоках питания ПЭВМ).
Нормирование шума производиться по ГОСТ 12.1.003-83 и СНиП 2.2.4/2.1.8.562-96.
Таблица 7.7.
| Уровни звукового давления в октавных полосах со среднегеометрическими частотами, Гц. |
Уровни звука в дБА |
| 31,5 |
63 |
125 |
250 |
500 |
1000 |
2000 |
4000 |
8000 |
| 86 дБ |
71 дБ |
61 дБ |
54 дБ |
49 дБ |
45 дБ |
42 дБ |
40 дБ |
38 дБ |
50 |
Фактические значения уровня шума в пределах нормы.
Уровень шума, поступающего извне можно снизить за счет уплотнения окон и двери. Так же можно оборудовать помещение звукопоглощающими поверхностями.
7.4.5 Обеспечение режимов труда и отдыха
Режимы труда и отдыха при работе с ПЭВМ и ВДТ должны организовываться в зависимости от вида и категории трудовой деятельности. Есть три группы видов трудовой деятельности, в нашем случае это группа А - работа по считыванию информации с экрана ВДТ или ПЭВМ с предварительным запросом.
При выполнении в течение рабочей смены работ, относящихся к разным видам трудовой деятельности, за основную работу с ПЭВМ и ВДТ следует принимать такую, которая занимает не менее 50% времени в течение рабочей смены или рабочего дня.
Для видов трудовой деятельности устанавливается 3 категория тяжести и напряженности работы с ВДТ и ПЭВМ. В нашем случае для группы А - по суммарному числу считываемых знаков за рабочую смену, но не более 60 000 знаков за смену.
Для обозначения категории труда, исходя из нашей группы А, укажем количество регламентированных перерывов, время их проведения и суммарное время на отдых:
Продолжительность непрерывной работы на ПЭВМ без регламентированного перерыва не должна превышать двух часов. Так как контроль за технологическими процессами должен производиться круглосуточно то выбирается 12 часовая рабочая смена. При 12-ти часовой рабочей смене и работе на ПЭВМ регламентированные перерывы следует устанавливать первые 8 часов работы через 2 часа от начала смены и через 1.5-2 часа после обеденного перерыва продолжительностью 15 минут каждый или продолжительностью 10 минут через каждый час работы. А в течение последних 4 часов работы, независимо от категории и вида работ, каждый час продолжительностью 15 минут.
В целях профилактики переутомления и перенапряжения при работе на ПЭВМ, в том числе при использовании дисплеев, необходимо выполнять во время регламентированных перерывов комплексы упражнений.
С целью снижения или устранения нервно-психического, зрительного и мышечного напряжения, предупреждения переутомления необходимо проводить сеансы психофизиологической разгрузки и снятия усталости во время регламентированных перерывов и после окончания рабочего дня.
Эти сеансы должны проводиться в специально оборудованном помещении - комнате психологической разгрузки. Эту комнату следует располагать на расстоянии не более 75 м от рабочих мест. Для снижения напряженности труда операторов ПЭВМ необходимо равномерно распределять их нагрузку и рационально чередовать характер деятельности - прием и выдачу результатов с работой за ПЭВМ и др. В ночные часы не должны выполняться работы или задания, требующие сложных решений или ответственных действий.
7.4.6 Обеспечение электробезопасности
С точки зрения ПУЭ (правил устройства электроустановок) помещение не является опасным. В помещении поддерживается оптимальная температура и влажность воздуха, вредные химические вещества отсутствуют.
Для защиты оператора от поражения электрическим током при прикосновении к металлическим нетоковедущим частям, которые могут оказаться под напряжением в результате повреждения изоляции используется защитное заземление, которое выполнено преднамеренным электрическим соединением металлических частей электроустановок с "землей" или ее эквивалентом.
Защитному заземлению и занулению подвержены розетки и металлические части электроустановок доступные для прикосновения человека и не имеющие других видов защиты, обеспечивающих электробезопасность.
В качестве заземляющих проводников используются специально предназначенные для этой цели проводники.
В кабинете располагается щит с автоматами, в нем находятся 3 автомата рассчитанных на ток отсечки 25А, один из которых предназначен для питания розеток компьютеров, второй для питания остальных розеток, третий для освещения.
Так же мы используем для стабильной работы ПЭВМ источник бесперебойного питания АРС Smart-UPS RM 2U.
7.4.7 Защита от статического электричества
Источником статического электричества служат трущиеся части принтеров. Нормирование допустимого поверхностного электростатического потенциала видеомонитора производиться по СанПиН 2.2.2.542-96” и не должен превышать 500 В. Статическое электричество может привести к пожару, взрыву, физиологическому воздействию на организм. Данный фактор также может привести к выводу из строя некоторых отдельных частей ПЭВМ.
Поверхностная проводимость диэлектриков повышается при увеличении влажности воздуха. Влажность воздуха повышается при помощи увлажнителей воздуха встроенных в кондиционеры. Оптимальная влажность воздуха для предотвращения статических разрядов должна быть 85% при температуре воздуха 21°С.
Для защиты работающих от статического заряда используется обувь с электропроводящей подошвой, антиэлектростатическая одежда, не содержащая синтетических волокон и предусмотрено устройство электропроводящих полов..
В лаборатории два раза в день проводится антистатическая обработка с применением специальных антистатических моющих средств типа «Антистатик», что приводит к повышению поверхностной проводимости материалов.
7.4.8 Обеспечение допустимых уровней электромагнитных полей
Электромагнитные поля, характеризующиеся напряженностями электрических и магнитных полей, наиболее вредны для организма человека. Основным источником этих проблем, связанных с охраной здоровья людей, использующих в своей работе персональные компьютеры, являются дисплеи (мониторы), особенно дисплеи с электронно-лучевыми трубками. Они представляют собой источники наиболее вредных излучений, неблагоприятно влияющих на здоровье оператора. Приведём извлечение из СанПиН 2.2.2/2.4.1340-03
в таблице 7.8.;
Таблица 7.8. временные допустимые уровни ЭМП, создаваемых ПЭВМ на рабочих местах
| Наименование параметров |
ВДУ |
Напряженность
электрического
поля
|
в диапазоне частот 5 Гц - 2 кГц |
25 В/м |
| в диапазоне частот 2 кГц - 400 кГц |
2,5 В/м |
| Плотность магнитного потока |
в диапазоне частот 5 Гц - 2 кГц |
250 нТл |
| в диапазоне частот 2 кГц - 400 кГц |
25 нТл |
| Напряженность электростатического поля |
15 кВ/м |
Для достижения ПДУ ЭМП можно предусмотрено применение следующих методов:
экранирование рабочего места;
удаление рабочего места от источника ЭМП;
рациональное размещение в рабочем помещении оборудования, излучающего электромагнитную энергию.
7.4.9 Обеспечение пожаробезопасности
Для решения проблем пожаробезопасности нам необходимо сначала определить и обосновать категорию помещения, руководствуясь НПБ 105-03 извлечение в таблице 7.9.:
Таблица 7.9. Категории помещений по взрывопожарной и пожарной опасности
| Категория помещения |
Характеристика веществ и материалов, находящихся (обращающихся) в помещении |
В1 — В4
пожароопасные
|
Горючие и трудногорючие жидкости, твердые горючие и трудногорючие вещества и материалы (в том числе пыли и волокна), способные при взаимодействии с водой, кислородом воздуха или друг с другом только гореть при условии, что помещения, в которых они имеются в наличии или обращаются, не относятся к категориям А или Б |
Исходя из таблицы, мы делаем вывод, что в нашем случае помещение относится к категории В.
Одной из наиболее важных задач пожарной защиты является защита помещений от разрушений и обеспечение их достаточной прочности в условиях воздействия высоких температур при пожаре. Учитывая высокую стоимость электронного оборудования помещений, а также категорию его пожарной опасности, здание имеет 1 степень огнестойкости.
Таблица 7.10.
| Степень огнестойкости здания |
Предел огнестойкости строительных конструкций, не менее |
| Несущие элементы здания |
Наружные ненесущие стены |
Перекрытия междуэтажные
(в том числе чердачные и над подвалами)
|
Элементы бесчердачных покрытий |
Лестничные клетки |
Настилы
(в том числе с утеплителем)
|
Фермы, балки, прогоны |
Внутренние стены |
Марши и площадки лестниц |
| I |
R 120 |
Е З0 |
REI 60 |
RE 30 |
R 30 |
REI 120 |
R 60 |
где R – потеря несущей способности;
E – потеря целостности;
I – потеря теплоизолирующей способности.
Цифрами обозначено время в минутах.
Для тушения пожаров на начальных стадиях широко применяются огнетушители.
В помещениях с ПЭВМ применяются главным образом углекислотные огнетушители, достоинством которых является высокая эффективность тушения пожара, сохранность электронного оборудования, диэлектрические свойства углекислого газа, что позволяет использовать эти огнетушители даже в том случае, когда не удается обесточить электроустановку сразу, при этих условия возможный пожар можно отнести к категории Е
Все помещения необходимо оборудовать установками стационарного автоматического пожаротушения. Наиболее целесообразно применять установки газового тушения пожара, действие которых основано на быстром заполнении помещения огнетушащим газовым веществом с резким сжижением содержания в воздухе кислорода. При наличии стационарного автоматического пожаротушения, количество огнетушителей уменьшается в два раза, поэтому у нас два огнетушителей ОУ-2 ППБ 01-03. Огнетушители расположены на высоте 1,5 метра от пола. Поверка осуществляется 1 раз в год.
Используя данные из приведённой выше таблицы 7.9., я сделал вывод, что помещение относится к категории В(пожароопасная)
, так как ПЭВМ находящиеся в помещении, состоят из твердых горючих и трудногорючих материалов, способных только гореть.
Расчет ширины эвакуационных выходов.

Определяю наименьшую ширину дверного проема и наибольшее число работников эвакуирующихся из производственных помещений объёмом до 15 тыс.м3
в течении 1 минуты на два выхода, расположенных по концам коридора.
Наибольшее расстояние до выхода L1
=40м., ширина прохода  согласно таблице 7.11. согласно таблице 7.11.
Таблице 7.11. расстояние от наиболее удалённых мест до ближайших эвак. выходов
| Объём помещения тыс.м3
|
Категория помещения |
Степень огнестойкости |
Расстояние, м, при плотности людского потока в общем проходе, чел/м |
| до 1 |
от 1 до 3 |
от 3 до 5 |
| до 15 |
А, Б |
I, II, IIIа |
40 |
25 |
15 |
| В |
I, II, III, IIIа |
100 |
60 |
40 |
| IIIб, IV |
70 |
40 |
30 |
| V |
50 |
30 |
20 |
Необходимая скорость перемещения людей
 , ,
ей соответствует плотность людского потока  ; ;
Отсюда наибольшее количество работников которое может эвакуироваться по всему проходу:  . .
Зная плотность людского потока Д1
и скорость перемещения людей по таблице 7.12. определяю интенсивность движения людского потока q=16м/мин
Таблица 7.12. скорость и интенсивность движения людского потока
| Плотность потока чел/м2
|
Горизонтальный путь |
Дверной проем |
Лестница вниз |
Лестница вверх |
| Интенсивность, м/мин |
Скорость, м/мин |
Интенсивность, м/мин |
Интенсивность, м/мин |
Скорость, м/мин |
Интенсивность, м/мин |
Скорость, м/мин |
| 4 |
16 |
40 |
18,4 |
16 |
40 |
10,4 |
26 |
Отсюда необходимая ширина дверного проема:

максимальная интенсивность движения людского потока через дверной проем по таблице7.12., qmax
=18,4м/мин
Если из коридора есть выход наружу или в другой горизонтальный коридор, то максимальная интенсивность движения людского потока по горизонтальному пути qmax
=16м/мин, тогда необходимая ширина дверного проема будет:

|




