Введение
Автоматизация производственных процессов является одним из ведущих направлений технического прогресса, важным фактором повышения эффективности и производительности труда, а также повышения качества выпускаемой продукции во всех сферах производства.
Автоматизация технологических процессов осуществляется путем внедрения систем контроля, регулирования и управления на базе комплекса технических средств общепромышленного и отраслевого назначения. В настоящее время накоплен уже значительный опыт автоматизации технологических процессов.
Широкому внедрению автоматизации в промышленности способствует наличие ряда предпосылок. В их числе непрерывность, поточность, комплексная механизация технологических процессов, большие объемы производства, серийный выпуск необходимых приборов и технических средств автоматизации.
Номенклатура приборов общепромышленного назначения претерпела значительные качественные и количественные изменения. Освоено серийное производство так называемой Государственной системы приборов, обладающей повышенной надежностью, унифицированными габаритными размерами и величинами выходных сигналов.
Применяют как автоматизированные системы, при которых часть функций управления возлагается на оперативный персонал, так и автоматические, когда функции управления выполняются только техническими средствами. Наиболее широко используют локальные автоматизированные системы, предназначенные для управления отдельными агрегатами.
Внедряют также автоматизированные централизованные системы, обеспечивающие управление работой группы технологического оборудования или технологическими процессами в целом.
Как показала практика, в результате автоматизации повышается производительность труда, снижаются потери сырья, обеспечивается выполнение требований как санитарно-гигиенических, так и техники безопасности.
Автоматизация технологических процессов позволяет выполнять отдельные операции без непосредственного участия человека. При индивидуальном ведении хозяйства важно использование принципиально новых автоматизированных систем управления микроЭВМ. Автоматизация технологического процесса обеспечивает сокращение доли тяжелого и малоквалифицированного физического труда, что ведет к повышению производительности, непременному экономическому росту.
1. Анализ существующей системы управления
1.1 Описание технологического процесса
Технологический процесс взбивания зефирной массы под давлением изображен на функциональной схеме.
В емкости Е – 1, Е – 2, Е – 3, Е – 4 и Е – 5 поступают рецептурные компоненты. В Е – 1 – яблочное пюре, Е – 2 – белок, Е – 3 – сахароагаровый сироп, в Е – 4 – кислота и краситель эссенцией, в Е – 5 – сахарный песок.
На каждой емкости установлены датчики уровня, а на выходе – датчики расхода. Компоненты из емкостей перекачиваются плунжерными насосами. Расход компонентов из емкости регулируются с помощью регулирующих клапанов 1–3, 2–3, 3–3, 4–3, 5–3, 6–3. В емкости Е – 6 готовится рецептурная смесь, в которую поступают все компоненты смеси. Готовая рецептурная смесь поступает из емкости Е – 6 через теплообменник Т-1 на котором установлены датчики температуры и давления, где смесь нагревается до 60ºС. Смесь насосом Н-6 перекачивается в камеру для взбивания зефирной массы СЭ-1. Камера представляет собой роторный центробежный смеситель-эмульсатор. В нем установлены датчики давления и температуры.
При этом в смесь вводится под давлением 0,4 МПа воздух, поступающий из ресивера.
1.2 Описание установки
Установка для взбивания состоит из разъемной взбивальной камеры и привода с вариатором. Внутри взбивальной камеры помещено два статора, один из которых неподвижно скреплен с корпусом, а второй – с крышкой камеры. На внутренней стороне каждого статора имеются зубья, расположенные шестнадцатью концентрическими рядами. Между зубьями статоров проходят зубья ротора; размеры зубьев выбраны такими, что образуется кольцевой канал извилистой формы шириной 1 мм. Рецептурная смесь вместе с воздухом, поступающим от компрессора под давлением 0,4 – 0,6 МПа, подается внутрь камеры. Ротор изготовлен из бронзы и имеет диаметр 348 мм. Внутренняя поверхность взбивальной камеры выполнена из нержавеющей стали, а статоры – из бронзы. Взбивальная камера снабжена рубашкой для водяного охлаждения. Пузырьки воздуха на выходе из камеры расширяются и таким образом происходит взбивание зефирной массы. Готовая масса по трубопроводу подается на отливку.
1.3 Постановка задачи
В специальной части данного курсового проекта будет произведен расчет автоматизированной системы регулирования давления в камере взбивания.
Для этого необходимо:
1 произвести анализ существующих систем управления;
2 разработать систему взбивания зефирной массы под давлением;
3 произвести необходимый выбор соответствующего промышленного оборудования;
4 построить автоматизированную систему регулирования давления.
2. Синтез АСУТП взбивания зефирной массы под давлением
2.1 Структурная схема АСУТП
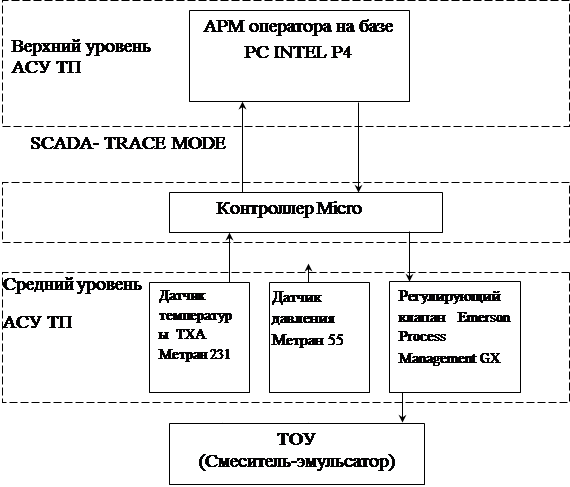
Структурная схема АСУТП взбивания зефирной массы под давлением представлена на рисунке 2 и состоит из трех уровней.
Верхний уровень включает в себя персональный компьютер Р4 и SCADA-систему TRACEMODE. SCADA-система – это система диспетчерского управления и сбора данных, необходимая для визуализации и диспетчеризации технологического процесса. SCADA-система – это специальное программного обеспечение, обеспечивающее решение задачи ввода и вывода информации в системе АСУТП, отслеживание аварийных и предаварийных ситуаций, представление на пульт оператора графической информации о процессе, поддержании отчетов о выполнении технологического процесса.
К среднему уровню относится микропроцессорный контроллер ModiconMicro ПЛК TSX 37–05, предназначен для получения в реальном времени информации с датчика, для ее сравнения, преобразования и обмена с автоматизированным рабочим местом оператора, а также для передачи управляющих сигналов на исполнительный механизм.
Датчик и исполнительный механизм подключаются к ModiconMicro с помощью индивидуальных кабельных связей. Внутри контроллера сигналы обрабатываются в цифровой форме.
Нижний уровень состоит из исполнительного механизма и датчика.
Датчик используется для преобразования физических параметров технологического процесса в электрические сигналы с технологического объекта управления и поступающие на многофункциональный, микропроцессорный контроллер;
Исполнительный механизм преобразует и передает воздействие с микропроцессорного контроллера на технологический объект управления.
Рисунок 2.1 – Структурная схема АСУТП
2.2 Выбор датчиков
Малогабаритные датчики для измерения давления Метран-55
Предназначены для работы в различных отраслях промышленности, системах автоматического контроля, регулирования и управления технологическими процессами и обеспечивают непрерывное преобразование измеряемых величин избыточного (ДИ), абсолютного (ДА) давления, разрежения (ДВ), давления-разрежения (ДИВ) нейтральных и агрессивных сред в унифицированный токовый выходной сигнал.
Преимущества датчиков:
– погрешность измерений ±0,15%;
– диапазон перенастройки 10:1;
– непрерывная самодиагностика;
– встроенный фильтр радиопомех;
– микропроцессорная электроника;
– возможность простой и удобной настройки параметров двумя кнопками.
Измеряемые среды: жидкость, пар, газ (в т.ч. газообразный кислород).
Диапазон измеряемых давлений:
– минимальный 0–0,06 МПа;
– максимальный 0–100 МПа.
Выходной сигнал: 4–20, 0–5, 0–20 мА.
Обновленный комплекс малогабаритных датчиков давления и уровня Метран-55 имеет следующий ряд уникальных потребительских свойств:
– широкая область применения датчиков в химии, фармацевтике, пищевой промышленности, теплоэнергетике;
– применение специальных материалов чувствительных элементов: керамика A1203, поливинилхлорид (PVC), поливинилденфторид (PVDF);
– большой выбор вариантов электрических и механических соединений;
– широкий диапазон измеряемых давлений минимальный 0–0,6 кПа; максимальный 0–220 МПа;
– погрешность измерений до ±0,1%;
– диапазон температур измеряемой среды от – 40°С до +300°С;
– выходной сигнал 4…20 мА, 0…20 мА, 0…10 В, 0…5 В, 0…1 В, 1…6 В;
– долговременная стабильность, менее 0,1% в год;
– высокая перегрузочная способность до 80 раз;
– индикаторное устройство с перенастраиваемым релейным выходом;
– степень защиты от воздействия пыли и воды IP 65÷68;
– искробезопасное исполнение: ЕхiaIIСТ4.
Прибор является простым и удобным в исполнении. Использование отечественного прибора серии Метран 55 уменьшит затраты на его установку, ремонт и эксплуатацию. Простота конструкции, надежность, малые габариты, невысокая стоимость обеспечивают повышенный спрос потребителей. Однако применение устройств этих серий не исключает и возможности применения приборов других фирм.
Преобразователи термоэлектрические ТХА Метран-231.
Сменная термометрическая вставка – термопарный кабель КТМС-ХА(ХК) ТУ 16–505.757–75.
Диапазон измеряемых температур: О…600°С.
Номинальная температура применения: 585°С.
Класс допуска: 2 по ГОСТ 8.585.
Рабочий спай: изолированный.
Материал головки: сплав АК12.
Стандартный ряд монтажных длин L: 80, 100, 120, 160, 200 мм.
Вид исполнения по ремонтопригодности:
– ремонтируемое изделие;
– неремонтируемое изделие.
Климатическое исполнение: У1.1 по ГОСТ 15150, но для значений температуры окружающего воздуха от -45° до 85°С; ТЗ по ГОСТ 15150, но для значений температуры окружающего воздуха от -10° до 85°С с относительной влажностью до 98% при температуре 35°С.
Масса: 1,25…3,6 кг в зависимости от длины монтажной части и исполнения.
2.3 Выбор исполнительного механизма
Регулирующие клапаны серии EmersonProcessManagement конструкции GX.
Рабочая среда: газ, пар, жидкости.
Диаметр условныйDN: 25…100 мм (DIN), 1–4» (ANSI).
Давление условное PN: 1…4 МПа (DIN), класс 150 и 300 (ANSI).
Рабочая температура: от -29 (-46)°С до +232 (+371)°С.
Класс герметичности: IV, V или VI (ANSI).
Материал седла: сталь, сплавы.
Материал корпуса и крышки: сталь, сплавы.
Регулирующий клапан конструкции GX предназначен для управления потоком среды (регулирование или отсекание) и представляет собой односедельный клапан с направлением потока вверх, с ввинчиваемым седлом, с одним из трех типов трима (комплекта внутренних деталей): с направляющей по штоку, с направляющим седлом или с разгруженным плунжером.
2.4 Выбор контроллера
Программируемые логические контроллеры MICRO разработаны с учетом требований изготовителей комплектного оборудования, станков и агрегатов (OEM). Эти контроллеры позволяют решать самые разнообразные задачи, возникающие в этой области – ввод, обработку и формирование дискретных и аналоговых сигналов, PID – регулирование, позиционирование, быстрый счет, организацию диалога с оператором, сокращение времени реакции устройства управления на внешние воздействия и т.д. Возможно применение контроллеров MICRO для создания АСУТП с числом входов / выходов до 200…300. Контроллеры MICRO обладают развитыми сетевыми возможностями, что позволяет применять типовые сетевые решения на основе коммуникационных сетей с различными функциональными возможностями и ценовыми характеристиками.
При использовании контроллеров MICRO уменьшаются затраты на автоматизацию благодаря сокращению затрат времени и труда на программирование, отладку, и диагностирование алгоритмов управления (инструментальные средства PL7 MICRO), на монтажные работы (система TELEFAST), на эксплуатацию системы управления (оболочка PL7ProDyn). В руках технолога или программиста оказывается мощный инструмент разработки приложений на специализированных языках, рекомендованных МЭК (стандарт IEC1131–3) для использования в рассматриваемой предметной области.
Контроллер TSX Micro удобен для применения в малых системах, системах, призванных быть легко перемещаемыми, а также в ситуациях, где минимальное пространство требует максимальной компактности или когда условия окружающей среды требуют надежной работы.
Таблица 1 – Техническая характеристика ModiconMicro ПЛК TSX37–05
| Тип ПЛК |
TSX 37 05 028DR1 |
| Дискретные в/в кол-во |
8 входов и 8 выходов. |
| Аналоговые в/в, кол-во, тип |
2 полуформатных модуля;
8 вх., 12 бит (+ 10 В, 0–10 В), (0–20 мА, 4–20 мА);
4 диф. универс. входа (4–20 мА, термопара, термосопротивление);
4 вых., 11 бит + знак (+ 10 В, 0–20 мА, 4–20 мА).
|
| Управление процессом |
Контуры управления; 3 встроенные функции: PID, ШИМ, Серво с интерфейсом на терминале ССХ17 (управление и настройка до 9 контуров). |
Импульсные входы
– встроенные
кол-во
тип
|
2 х 500 Гц на дискретных входах;
2 полуформатных модуля;
1 или 2 канала, 40 кГц; 2 х 500 кГц;
Счет прямой, обратный, реверсивный.
|
Коммуникации
– встроенные
|
Порт RS-485; протоколы Uni-Telway master/slave, Modbus slave, ASCII. |
| Структурапрограммы |
Однозадачная (циклич. или периодическая); многозадачная (циклич. или периодическая основная задача, периодическая быстрая задача); задачи обработка события (прерывания) – до 8 задач. |
| Структурапамяти |
9 К слов защищенной памяти RAM. |
| Напряжение питания |
110/240 В пер. тока (встроенный источник питания, 24 В, для датчиков). |
Технические характеристики дополнительных модулей аналогового в/в:
– TSX AEZ802 8 вх. 0–20mА/4–20mА, 12 бит;
– TSX ASZ401 4 вых. 11 бит + знак (+ 10 В, 0–20 мА, 4–20 мА).
Технические характеристики PLC TSX Micro
Базовая конфигурация Micro включает в себя электропитание (24 В постоянного тока или 220 В переменного тока), блок центрального процессора с памятью, мини-дисплей для диагностики, а также различные коммуникационные порты и платы.
Удовлетворяя различным потребностям по объему задач, Micro предлагает на выбор 5 модульных конфигураций, каждая из которых предполагает несколько уровней интеграции (ввод / вывод, счетчики) и открытость (PCMCIA-карты для связи).
Micro предлагает более 40 различных специализированных модулей, включая быстрые счетчики, модули измерения и регулирования, модуль безопасности, входы / выходы на 24 В постоянного тока или 220 В переменного тока.
Модули могут быть в размер слота или половины слота на разное количество точек (8, 16, 32, 64). Все типы модулей дискретного ввода / вывода могут использоваться в рамках одной и той же конфигурации контроллеров. Micro можно также интегрировать с другими компонентами Schneider Electric, например, преобразователями частоты Altivar, терминалами оператора Magelis, для создания простых и эффективных глобальных решений.
Программное обеспечение PLC TSX Micro PL7 имеет возможность программирования на 5 языках. Меню с заранее заданными настройками упрощает конфигурирование различных прикладных модулей. Во время отладки или обслуживания PL7 позволяет менять настройки точек в основном для того, чтобы определить неизвестные значения или обнаружить ошибки программы.
Благодаря PL7, общей среде программирования для Micro и Premium, обеспечивается непревзойденная гибкость выбора вашего следующего решения. Прикладные программы переносимы и могут использоваться на обеих платформах.
Архитектура PLC TSX Micro
Micro устанавливается без дополнительных дорогостоящих или больших устройств (ограничителей перенапряжения, дополнительных батарей, устройств защиты выходов и источников питания).
Компактность TSX Micro достигается с помощью сменных клеммных колодок или внешних клемм. Использование системы быстрого монтажа Telefast 2 гарантирует удобное, быстрое и безошибочное подключение, которое интегрирует защиту, распределение питания и адаптацию каналов. Модули входов / выходов высокой плотности и промаркированные на заводе кабели позволяют напрямую подключать исполнительные устройства для построения компактного, надежного и экономичного решения.
Модули AS-i Master упрощают соединение и уменьшают стоимость системы. При установке большого количества устройств Micro требует меньшего количества кабелей и обеспечивает более быстрое подсоединение оборудования, сокращая время установки системы.
Сетевые решения для PLC TSX Micro
Реализация системы на базе TSX Micro с использованием сети Ethernet дает много преимуществ. Использование стандарта TCP/IP Modbus Ethernet – это универсальное сетевое решение для системных интеграторов и конечных пользователей. Подключение к Ethernet обеспечивает взаимосвязь датчиков и устройств управления (преобразователей частоты, средств измерения или визуального отображения) без ограничений, связанных с закрытыми решениями.
Оборудованный модулем связи на 100 МГц Micro предлагает расширенный доступ к прикладным программам и мгновенную реакцию. Ethernet также обеспечивает быстрое подключение и установку ПО. Без дополнительного интерфейса, Micro поддерживает возможность для подключения в локальном режиме, что необходимо для корректировки или отладки прикладных программ.
Расположенный отдельно от процессора, модуль ETZ адаптирует поток информации, доступный для передачи через терминальный или PCMCIA-порт, одновременно поддерживая обмен с другими объектами.
Диагностика, корректировка или загрузка программы без специального программного обеспечения или драйверов, подключая Micro к ПК через стандартный модем, используя встроенный порт связи RS 232 (56 Kbps) и протокол PPP в режиме TCP/IP.
После установки начальных параметров, модуль Ethernet позволяет получить полноценный графический доступ к экранам обслуживания, конфигурации и диагностики, используя только стандартный браузер, входящий в состав ОС Windows.
2.5 Выбор
SCADA
-системы.
ТРЕЙС МОУД – это программный комплекс, предназначенный для разработки, настройки и запуска в реальном времени систем управления технологическими процессами. Все программы, входящие в ТРЕЙС МОУД, делятся на две группы:
– инструментальная система разработки АСУ;
– исполнительные модули (runtime).
Инструментальная система включает в себя три редактора:
– Редактор базы каналов;
– Редактор представления данных;
– Редактор шаблонов.
В них разрабатываются: база данных реального времени, программы обработки данных и управления, графические экраны для визуализации состояния технологического процесса и управления им, а так же шаблоны для генерации отчетов о работе производства.
В зависимости от лицензии инструментальная система позволяет создавать проекты на разное количество каналов. Существуют следующие градации инструментальных систем по количеству точек ввода / вывода в одном узле проекта: 128, 1024, 32000х16, 64000х16.
Редактор базы каналов
В Редакторе базы каналовсоздается математическая основа системы управления: описываются конфигурации рабочих станций, контроллеров и УСО, а также настраиваются информационные потоки между ними. Здесь же описываются входные и выходные сигналы и их связь с устройствами сбора данных и управления. В этом редакторе задаются периоды опроса или формирования сигналов, настраиваются законы первичной обработки и управления, технологические границы, программы обработки данных и управления. Здесь настраивается архивирование технологических параметров, сетевой обмен, а также решаются некоторые другие задачи.
Результатом работы в этом редакторе является математическая и информационная структуры проекта АСУТП. Эти структуры включают в себя набор баз каналов и файлов конфигурации для всех контроллеров и операторских станций (узлов) проекта, а также файл конфигурации всего проекта. Файл конфигурации проекта имеет расширение ctm и сохраняется в рабочей директории системы разработки. Для хранения всех остальных файлов проекта в рабочей директории создается каталог, имя которого совпадает с именем файла конфигурации. При этом базы каналов сохраняются в файлы с расширениями dbb.
Редактор представления данных
Вход в редактор представления данных осуществляется либо двойным нажатием ЛК на соответствующем ярлыке в папке ТРЕЙС МОУД 5.0, либо запуском исполнительного модуля picman.exe. Здесь разрабатывается графическая часть проекта системы управления. При этом создается статичный рисунок технологического объекта, а затем поверх него размещаются динамические формы отображения и управления. Среди них такие, как поля вывода численных значений, графики, гистограммы, кнопки, области ввода значений и перехода к другим графическим фрагментам и т.д.
Кроме стандартных форм отображения (ФО), ТРЕЙС МОУД позволяет вставлять в проекты графические формы представления данных или управления, разработанные пользователями. Для этого можно использовать стандартный механизм Active-X.
Все формы отображения информации, управления и анимационные эффекты связываются с информационной структурой, разработанной в редакторе базы каналов.
Графические базы узлов проекта, созданные в редакторе представления данных, сохраняются в файлах с расширением dbg. Их сохранение осуществляется в соответствующие директории проектов. Исполнительные модули – это программы, под управлением которых запускается АСУ, созданная в инструментальной системе. В группу исполнительных модулей входят следующие программы:
– МРВ;
– NetLink МРВ;
– Adaptive Control МРВ;
– МРВМодем +;
– Double Force МРВ;
– Double Force NetLink МРВ;
– Adaptive Control Double Force МРВ;
– NetLinkLight;
– SUPERVISOR;
– Глобальный регистратор;
– Сервер документирования;
– Консоль тревог;
– Микро МРВ;
– Микро МРВ Модем +;
– Микро МРВ GSM +;
– GSM – активатор;
– Web – активатор.
Первые двенадцать мониторов предназначены для организации работы верхнего и административного уровней АСУ.
Микро МРВ, Микро МРВ Модем+ и Микро МРВ GSM + предназначены для работы в контроллерах нижнего уровня систем управления, естественно, при условии наличия в них операционной системы MS DOS.
Монитор реального времени (МРВ)
Этот монитор предназначен для запуска на АРМ операторов, с его помощью осуществляющих супервизорный контроль и управление технологическими процессами. Под управлением МРВ выполняются такие задачи, как:
– запрос данных о состоянии технологического процесса с контроллеров нижнего уровня по любому из встроенных протоколов или через драйвер;
– передача на нижний уровень команд управления по любому из встроенных протоколов или через драйвер;
– обмен данными с платами УСО;
– сохранение данных в архивах;
– обмен по сети с удаленными МРВ;
– передача данных по сети на следующий уровень АСУ;
– обмен с базами данных через ODBC;
– представление оператору графической информации о состоянии технологического процесса;
– автоматическое и супервизорное управление технологическим процессом;
– обмен данными с другими приложениями WINDOWS через DDE/NetDDE/OPC;
– и другие функции.
NetLink МРВ
По своим функциям этот монитор аналогичен МРВ. Однако в нем блокированы обмен с драйвером, обмен по встроенным протоколам MODBUS и ADAM, а так же клиентские функции OPC и DDE. Таким образом, NetLink МРВ может применяться только в составе систем управления, где на нижнем уровне используются PC-контроллеры, программируемые с помощью ТРЕЙС МОУД.
AdaptiveControl МРВ
Функции этого монитора полностью совпадают с МРВ. Однако, в отличие от последнего, данный монитор поддерживает библиотеку алгоритмов адаптивного регулирования.
МРВ Модем +
Этого монитор отличается от МРВ поддержкой обмена данными по коммутируемым линиям.
DoubleForce МРВ
DoubleForce МРВ работает как обычный МРВ, но поддерживает дополнительно функции горячего резервирования.
DoubleForceNetLink МРВ
DoubleForceNetLink МРВ поддерживает функции горячего резервирования и отличается от DoubleForce МРВ тем же, чем NetLink МРВ от МРВ – позволяет создавать системы управления только при условии использования на нижнем уровне PC-совместимых контроллеров, программируемых с помощью ТРЕЙС МОУД.
AdaptiveControlDoubleForce МРВ
Этот монитор в дополнение к функциям МРВ поддерживает горячее резервирование и адаптивное регулирование.
NetLinkLight
Данный монитор не поддерживает функций обработки данных и автоматического управления. Он является дополнительной графической консолью, которая может подключаться с удаленного компьютера к запущенному МРВ. Таким образом, имея в сети один монитор реального времени, можно, используя NetLinkLight, создать требуемое количество рабочих мест, равноправных с МРВ по функциям отображения и супервизорного управления.
SUPERVISOR
Этот монитор ТРЕЙС МОУД предназначен для создания АРМ администратора. Он, так же как NetLinkLight, является графической консолью и подключается по сети к МРВ или Глобальному регистратору. При этом SUPERVISOR можно использовать для оперативного управления (как NetLinkLight), а так же можно переключить в режим отображения данных из архивов. Архивные данные можно просматривать по временным срезам либо с заданной скоростью в режиме playback.
Глобальный регистратор (ГР)
Это специальный монитор ТРЕЙС МОУД, предназначенный для ведения глобального архива по всему проекту. Он архивирует данные, посылаемые ему по сети мониторами реального времени. После сохранения данных в архив Глобальный регистратор может передавать их для просмотра мониторам.
SUPERVIZOR
Для организации дублирования глобального архива следует запустить в сети еще один монитор Глобальный регистратор. При этом оба ГР будут принимать данные, посылаемые для архивирования, и сохранять в свои архивы. Дублированный глобальный регистратор поддерживает функции синхронизации архивов при работе в реальном времени и при запуске.
Глобальный регистратор может так же выступать как OPC и DDE сервер и поддерживает обмен с базами данных через ODBC.
Сервер документирования
Сервер документирования используется для решения задачи документирования технологической информации. Он по команде МРВ, собственному сценарию или команде оператора интерпретирует созданные заранее шаблоны, запрашивает у МРВ необходимые данные и формирует по ним готовые документы. Эти документы могут быть распечатаны на принтере, отправлены по E-mail или опубликованы на WEB-сервере.
Микро монитор реального времени (Микро МРВ)
Микро МРВ предназначен для управления задачами сбора данных и управления в контроллерах нижнего уровня АСУТП. Он может быть использован в любых IBM-совместимых контроллерах.
По возможностям математической обработки, управления, обмена данными с другими мониторами ТРЕЙС МОУД Микро МРВ идентичен монитору реального времени. Однако для него не реализованы функции графического вывода информации и архивирования.
Микро МРВ Модем +
Функции этого монитора совпадают с Микро МРВ. Единственным его отличием является встроенная поддержка обмена данными с помощью модема по коммутируемым каналам, что позволяет использовать Микро МРВ для создания удаленных пунктов сбора информации, обменивающихся данными через телефонную сеть.
Микро МРВ GSM +
Этот монитор отличается от Микро МРВ поддержкой архивов, обмена по сети GSM, используя механизм SMS, и отсутствием поддержки сетевого обмена. Он имеет те же параметры запуска, что и обычный Микро МРВ за исключением связанных с сетевым обменом. К именам исполнительных модулей Микро МРВ GSM+ добавляются символы –
G.
GSM-активатор
Обмен данными между мониторами ТРЕЙС МОУД по GSM-сети реализуется в виде SMS-сообщений (ShortMessageService). Для поддержки такого обмена на уровне операторских станций предназначен исполнительный модуль GSM-активатор, а на уровне контроллеров – специализированная модификация Микро МРВ – Микро МРВ GSM+.
3. Синтез САР
3.1 Математическая модель объекта управления
Математическим моделированием является процесс установления соответствия данному реальному объекту некоторого математического объекта, называемого математической моделью, а также исследование этой модели, позволяющее получать характеристики рассматриваемого реального объекта. Вид математической модели зависит как от природы реального объекта, так и задач исследования объекта и требуемой достоверности и точности решения этой задачи.
Любая математическая модель описывает реальный объект лишь с некоторой степенью приближения к действительности. Наиболее полное исследование процесса функционирования системы можно провести, если известны явные зависимости, связывающие искомые характеристики с начальными условиями, параметрами и переменными системы.
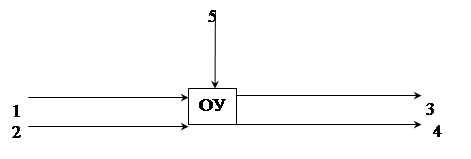
Структурная схема представлена на рисунке 3.1.
Рисунок 3.1 – Структурная схема смесителя-эмульсатора
Входные параметры:
1 – давление воздуха
2 – температура воды
Выходные параметры:
3 – давление воздуха
4 – температура массы
Помехи:
5 – концентрация смеси
3.2 Построение экспериментальной переходной функции объекта управления
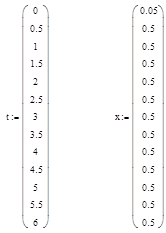
Построим график переходного процесса.
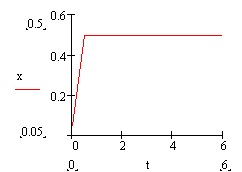
Рисунок 3.2 – График скачкообразного изменения входного воздействия
После чего значения изменения выходной величины y(t) заносим в таблицу.
Таблица 3.1 – Экспериментальные данные для построения переходной функции объекта управления
| t, с |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
4,5 |
5 |
5,5 |
6 |
| y(t) |
0,052 |
0,07 |
0,19 |
0,25 |
0,31 |
0,35 |
0,4 |
0,42 |
0,45 |
0,47 |
0,48 |
0,49 |
0,5 |
По данным таблицы 3.1 строится переходная функция объекта управления y(t) в программе MathCad
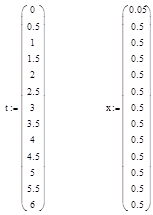
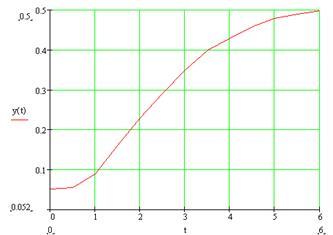
Рисунок 3.3 – Получение переходной функции объекта управления y(t)

Рисунок 3.4 – Определение динамических параметров
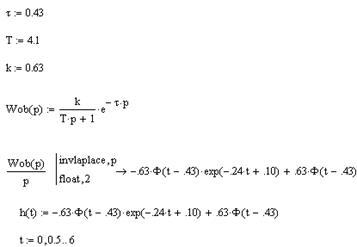
Вид полученной выше экспериментальной переходной функции позволяет сделать вывод, что с достаточной для практических задач точностью данный объект можно аппроксимировать последовательным соединением следующих типовых динамических звеньев: звеном чистого запаздывания и апериодическим звеном первого порядка. Таким образом, выражение для передаточной функции объекта управления будет иметь вид:
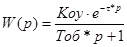
Величины характеризующие динамические свойства объекта управления такие как Коб
– коэффициент усиления объекта, T– постоянная времени объекта и τ– время запаздывания объекта можно определить с помощью данного графика.
Таким образом:
· Время запаздывания τ
= 0,43 сек.;
· Постоянная времени Т= 4,1 сек.;
· Коэффициент усиления Коб
=  =0,63 =0,63
Полученные данные об объекте управления являются исходными для расчетов настроечных параметров для регулятора
3.3 Идентификация объекта управления
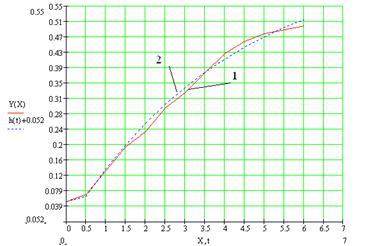
1 – расчетная переходная функция y(t), 2 – экспериментальная функция переходного процесса y(t)
Рисунок 3.5 – Идентификация экспериментальнойи расчетной переходной функции
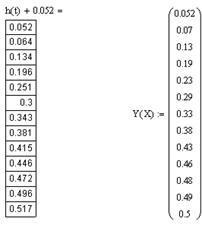
Таблица 3.2 – Экспериментальные и расчетные данные
| t |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
4,5 |
5 |
5,5 |
6 |
| y |
0,052 |
0,07 |
0,13 |
0,19 |
0,23 |
0,29 |
0,33 |
0,38 |
0,43 |
0,46 |
0,48 |
0,49 |
0,5 |
| yp
|
0,052 |
0,064 |
0,134 |
0,196 |
0,251 |
0,3 |
0,343 |
0,381 |
0,415 |
0,446 |
0,472 |
0,496 |
0,5 |
R =0,83*100% = 83%
Поскольку коэффициент детерминации имеет достаточно высокое значение, можно сказать об адекватности математической модели в пределах диапазона исходных данных.
3.4 Выбор закона регулирования и типа регулятора
Рассматриваемый объект управления обладает самовыравниванием и аппроксимируется апериодическим звеном первого порядка. Исходя из этого, в качестве типового примем апериодический процесс.
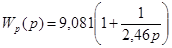
Параметры регулятора определим из формулы:

Кр
= 9,081
Ти
= 2,46
Таким образом, передаточная функция ПИ-регулятора примет вид:
Параметры регулятора определим из формулы:

Кр
= 14,378
Ти
= 1,032
Тп
= 0,172

3.5 Анализ устойчивости САР по критерию Найквиста
Понятие устойчивости является важнейшей качественной оценкой динамических свойств САР. Способность системы восстанавливать состояние равновесия, из которого она была выведена в результате какого-либо воздействия, называется устойчивостью.
Теорема (критерий Найквиста). Для устойчивости САУ необходимо и достаточно, чтобы годограф разомкнутой системы W(iω) при изменении ω от 0 до ∞ охватывал l/2 раз в положительном направлении точку (-1, i0), где l-число корней характеристического уравнения разомкнутой системы, лежащих в правой полуплоскости.
Для получения передаточной функции разомкнутой САР с ПИ – регулятором:
W(p) = W(p)об
*W(p)рег

Для получения передаточной функции разомкнутой САР с ПИД – регулятором:
W(p) = W(p)об
*W(p)рег

3.6 Оценка устойчивости САР
Построение АФЧХ разомкнутой системы с ПИ – регулятором.
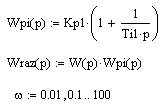

Рисунок 3.6 – АФЧХ разомкнутой системы с ПИ-регулятором
По АФЧХ разомкнутой системы с ПИ – регулятором можно сделать вывод, что замкнутая система с ПИ – регулятором является устойчивой по критерию Найквиста. Проведя дополнительные построения, определим: запас устойчивости по амплитуде составляет А=1/U=2,5, по фазе запас устойчивости Q=500
Построение АФЧХ разомкнутой системы с ПИД – регулятором.
По критерию Найквиста замкнутая система с ПИД – регулятором является устойчивой. Проведя дополнительные построения, определим: запас устойчивости по амплитуде составляет А=1/U=1,6, по фазе запас устойчивости Q=300
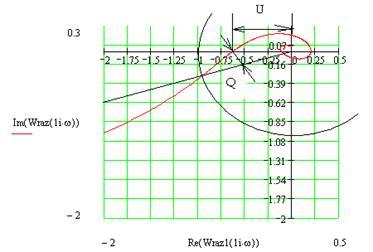
Рисунок 3.7 – АФЧХ разомкнутой системы с ПИД-регулятором
3.7 Определение показателей качества управления замкнутой САР
Передаточная функция замкнутой САР уровня с ПИ-регулятором:
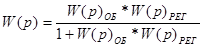
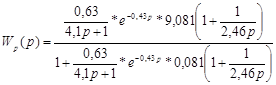
График переходной функции замкнутой АСР уровня с ПИ-регулятором.
По графику переходного процесса определяем следующие показатели качества:
Время регулирования tрег
.
Время регулирования определяется как время, при достижении которого выходная величина достигает 95% от установившегося значения и больше не выходит за диапазон 95% -105%. Время регулирования составляет 10 секунд;
Степень затухания (ψ)
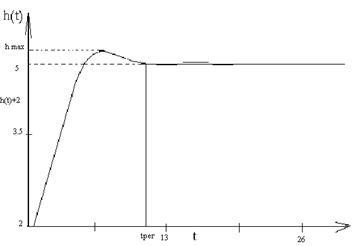
Рисунок 3.9 – Переходной функции замкнутой САР уровня с ПИ-регулятором
Степенью затухания ψ называется отношение разности приращений относительно установившегося значения двух соседних однонаправленных амплитуд одного знака кривой переходного процесса к большей из них, ψопределяется по формуле:
Перерегулирование показывает максимальное отклонение выходной величины hmax
(t) от установившегося значения h(∞).
Значение σ вычисляем по формуле:
Анализируя показатели качества переходного процесса в замкнутой системе, убеждаемся в правильности синтеза рассматриваемой системы.
Передаточная функция замкнутой САР уровня с ПИД-регулятором:
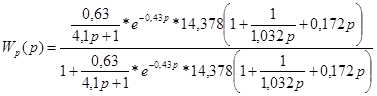
График переходной функции замкнутой АСР уровня с ПИД-регулятором:
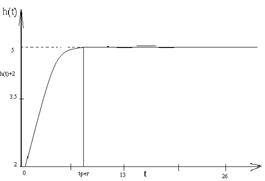
Рисунок 3.10 – Переходной функции замкнутой САР уровня с ПИД-регулятором
По графику переходного процесса определяем следующие показатели качества:
Время регулирования tрег
.
Время регулирования определяется как время, при достижении которого выходная величина достигает 95% от установившегося значения и больше не выходит за диапазон 95%-105%. Время регулирования составляет 7 секунд;
Степень затухания (ψ)
Степенью затухания ψ называется отношение разности приращений относительно установившегося значения двух соседних однонаправленных амплитуд одного знака кривой переходного процесса к большей из них, ψопределяется по формуле:
Перерегулирование показывает максимальное отклонение выходной величины hmax
(t) от установившегося значения h(∞).
Значение σ вычисляем по формуле:

Анализируя показатели качества переходного процесса в замкнутой системе, убеждаемся в правильности синтеза рассматриваемой системы.
Выводы
Для анализа качества переходных процессов в системах автоматического регулирования с ПИ- и ПИД – регуляторами представим показатели этих процессов в виде таблицы. В рассматриваемом примере и ПИ- и ПИД – регулятор позволяют обеспечить требуемое качество регулирование. Наиболее лучшее качество регулирование обеспечит ПИД – регулятор.
Таблица 3.3 – Показатели качества ПИ- и ПИД – регулятора
| ψ |
σ |
tрег
|
| ПИ-регулятор |
0,8 |
0,11% |
10 сек |
| ПИД-регулятор |
0,9 |
0,32% |
7 сек |
Заключение
Приведенные выше графики и расчеты позволяют сделать обоснованный выбор регулятора. Если выбор сделан правильно, это позволит обеспечить поддержание регулируемого параметра в заданном диапазоне, следовательно, повысить качество регулирования и минимизировать потери сырья и энергии.
Для рассмотренного объекта управления выбран ПИД – регулятор.
Список источников
1. А.И. Драгилев, И.С. Лурье. «Технология кондитерских изделий» Москва «ДеЛи принт» 2003.
2. Н.И. Шиянова, Е.Г. Валитова «Теория автоматического управления» учебное пособие. – Мелеуз, филиал ГОУ ВПО «МҐУТУ», 2008.
|