МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ДОНБАССКАЯ ГОСУДАРСТВЕННАЯ МАШИНОСТРОИТЕЛЬНАЯ АКАДЕМИЯ
Кафедра АПП
Расчетно-графическая работа
по дисциплине:
"Электропривод общепромышленных механизмов"
Выполнил студент:
гр. АПП-04-2 Измайлов А.О.
Проверил:
доцент кафедры АПППанкратов А.И.
Краматорск, 2008
Содержание
Реферат
введение
1. Выбор основных элементов
1.1 Исходные данные для выбора электропривода механизма
1.2 Статическая нагрузочная диаграмма механизма, определение
1.3 Предварительный выбор электродвигателя по мощности
1.4 Динамическая нагрузочная диаграмма электродвигателя
1.5 Проверка электродвигателя по условиям допустимого
1.6 Проверка электродвигателя по условиям допустимой
1.7 Проверка электродвигателя по условиям пуска
2. РАЗРАБОТКА СКАЛЯРНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
Выводы
Перечень ссылок
Реферат
Расчетно-пояснительная записка содержит 28 страницы, 8 рисунков и 5 источников.
Объект проектирования: электропривод с двигателем постоянного тока.
Цель работы: выбрать электродвигатель по мощности, рассчитать и построить механические характеристики электропривода в рабочих режимах и электромеханические переходные процессы в электроприводе, разработать принципиальную электрическую схему электропривода.
введение
Электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую, является электродвигатель, который чаще всего управляется при помощи соответствующих преобразовательных и управляющих устройств с целью формирования статических и динамических характеристик электропривода, отвечающих требованиям производственного механизма.
Целью данной РГР является расчет электродвигателя, входящего в состав электропривода механизма подъема мостового крана, а также создание системы управления электроприводом, которая бы обеспечила заданные режимы его работы.
1. Выбор основных элементов
электрооборудования механизма подъема мостовогокрана по исходным данным.
1.1 Исходные данные для выбора электропривода механизма
подъема мостового крана
| Вариант |
22 |
Грузоподъемность крана  , т , т |
140 |
Номинальная скорость подъема (спуска)  , м/с , м/с |
0,1 |
Допустимое ускорение  , м/с2 , м/с2
|
0,1 |
Рабочий путь подъема (спуска)  , м , м |
8 |
Диаметр барабана лебедки  , м , м |
0,5 |
Масса барабана лебедки  , т , т |
0,83 |
КПД механизма  |
0,8 |
Маховый момент муфты с тормозным шкивом  , кг·м2 , кг·м2
|
14 |
Передаточное число редуктора  |
24,9 |
| Тип электродвигателя |
АД |
| Кратность полиспаста, ап
|
7 |
Таблица 1 – Исходные данные для выбора электрооборудования механизма подъема мостового крана
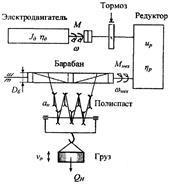
Рисунок 1 – Кинематическая схема механизма подъема мостового крана
1.2 Статическая нагрузочная диаграмма механизма, определение продолжительности включения
Стандартизованная для предварительного принятого тяжелого режима (5М) статическая нагрузочная диаграмма работы механизма подъема включает следующие операции:
1 Подъем груза массой  на высоту Н за время tР1
. на высоту Н за время tР1
.
2 Остановка механизма на время t0
перемещения груза по цеху.
3 Опускание груза массой с высоты Н за время tР2
=tР1
.
4 Остановка механизма на время t0
разгрузки.
5 Подъем крюковой подвески массой 0,2.
6 Остановка механизма на время t0
за время tР3
=tР2
=tР1
.
7 Опускание крюковой подвески массой 0,2 за время tР4
=tР3
=tР2
=tР1
8 Остановка механизма на время t0
загрузки.
Время подъема и опускания в статике определяется по формуле:

Продолжительность цикла для наибольшего коэффициента загрузки
 . .

Продолжительность включения механизма в статике, т.е. без учета динамических режимов, %

Статический момент на валу электродвигателя при подъеме грузов, различных по массе с учетом веса грузозахватного устройства определяется по формуле:
 , ,
где  – общее передаточное число механизма, – общее передаточное число механизма,
 ; ;


Статический момент на валу двигателя при спуске различных по массе грузов
 . .


Статическая нагрузочная диаграмма, рассчитанная по исходным данным и формулам строится в соответствующем масштабе и представлена на рисунке 2.
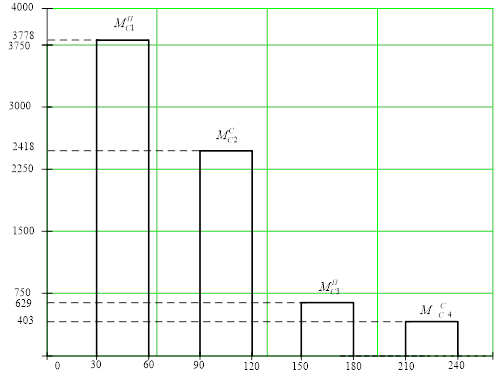
Рисунок 2 – Статическая нагрузочная диаграмма механизма подъема мостового крана
1.3 Предварительный выбор электродвигателя по мощности
Предварительно мощность электродвигателя с ближайшей стандартной продолжительностью включения  выбирается из условия подъема номинального груза по условию выбирается из условия подъема номинального груза по условию  , где , где
 , ,

Расчетная ПВ отличается от стандартных, а  , то расчетная мощность приводится к стандартной ПВс
m
по формуле: , то расчетная мощность приводится к стандартной ПВс
m
по формуле:

 . .
Номинальная частота вращения вала двигателя выбирается по условию:


Выбираем двигатель из условия Pн>=P'расч, а также выполняем проверку Mmax Mcmax. Выбираем 2 двигателя, тип двигателя: Д816: Mcmax. Выбираем 2 двигателя, тип двигателя: Д816:
1.4 Динамическая нагрузочная диаграмма электродвигателя, определение средних динамических моментов. Уточнение режима работы двигателя
Максимальный пусковой момент:
 , ,
где 
 . .
Минимальный пусковой момент (момент переключения):
 , ,
где 
 . .
Динамический момент при пуске:
 , ,
 . .
Суммарный приведенный момент инерции при пуске:
 , ,
Где
 , ,
 , , 
 – рабочая угловая скорость вращения вала двигателя, – рабочая угловая скорость вращения вала двигателя,  ; ;
 . .
Время  пуска привода при подъеме и опускании груза пуска привода при подъеме и опускании груза
 , ,
Суммарный приведенный к валу двигателя момент инерции при торможении:
 , ,

Тормозной момент:
Гденоминальный момент

 . .
 . .
Время электромеханического торможения механизма подъема:
 , ,
Уточненное значение продолжительности включения:

Число циклов в час:
 , ,
 . .
Динамическая нагрузочная характеристика показана на рисунке 3.

Рисунок 3 Динамическая нагрузочная диаграмма электродвигателя механизма подъема мостового крана
1.5 Проверка электродвигателя по условиям допустимого нагрева
При наличии динамической нагрузочной диаграммы и незначительном изменении скорости вращения вала двигателя в статических режимах удобнее использовать метод эквивалентного момента. По данным динамической нагрузочной диаграммы определяется эквивалентный момент за цикл работы:
 , ,
где  принимаем равными 0,5. принимаем равными 0,5.

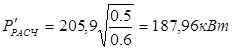
Эквивалентная мощность, соответствующая  и расчетной ПВ: и расчетной ПВ:


Выбранный двигатель не будет нагреваться выше допустимой температуры, если:


Условие выполняется.
1.6 Проверка электродвигателя по условиям пуска
Условие успешного запуска двигателя при подъеме наибольшего груза:
 , ,
Где
 , ,
 , ,  . .

Условие выполняется.
1.7 Проверка электродвигателя по условиям допустимой перегрузки
Выбранный по мощности двигатель проверяется по перегрузочной способности с учетом максимально возможных динамических моментов. Условие проверки по перегрузочной способности:
 , ,
 . .
Условие выполняется.
2. РАЗРАБОТКА СКАЛЯРНОЙ СИСТЕМЫ УПРАВЛЕНИЯЧАСТОТНЫМ ЭЛЕКТРОПРИВОДОМ ПО ЗАКОНУ U1/F1=CONST
Исходные данные для разработки скалярной системой управления частотным электроприводом по закону Ψ1=constпредставлены в таблице 2.1.
Таблица 2.1 – Исходные данные для разработки скалярной системой управления частотным электроприводом по закону Ψ1=const.
| Вариант, № |
27 |
| Количество зон регулирования |
2 |
| Тип двигателя |
Н511-8 |
| Номинальная мощность PН
, кВт |
34 |
| Номинальное напряжение UЛ
, В |
380 |
| Номинальный ток IН
, А |
79 |
| Номинальная скорость ωН
, об/мин |
680 |
| cosjН
/hН
, % |
0,82/80 |
| Максимальный момент МН
, Н∙м |
1128 |
| Маховый момент GD2
, кг∙м2
|
4,3 |
| cosjК
– режим КЗ |
0,51 |
| Статорное активное R1, Ом |
0,164 |
| Статорное реактивное х1
, Ом |
0,232 |
Роторное активное  , Ом , Ом |
0,307 |
Роторное реактивное  , Ом , Ом |
0,464 |
| Передаточное число редуктора і |
12,41 |
| Момент инерции механизма JИО
, кг×м2
|
554 |
| Закон управления |
Ψ1=const |
| Тип САР |
ЗС |
| Диапазон регулирования |
5 и 2 |
| Способ электромеханического торможения |
Рекуп. |
| Статическая ошибка регулирования δω,
, % |
1 |
| Динамическая ошибка регулирования σω
, % |
10 |
| Допустимое ускорение εДОП
, рад/с2
|
120 |
Таблица 2.1 – Исходные данные для разработки скалярной системой управления частотным электроприводом по закону Ψ1=const.
Схема тиристорного преобразователя частоты со звеном постоянного тока и рекуперативным торможением
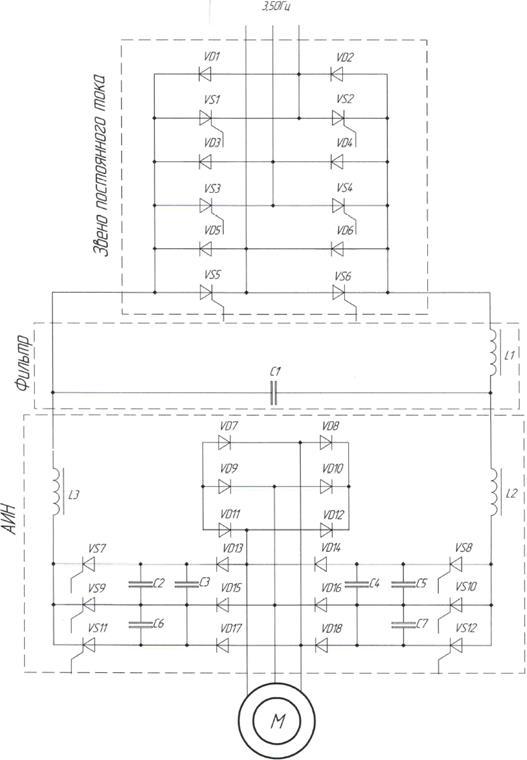
Рисунок 4 – Силовая схема частотного преобразователя
Силовая схема частотного преобразователя состоит из тиристоров VS1...VS6, встречно включенного диодного моста VD1...VD6, обеспечивающего инверторный режим.
Тиристорный блок предназначен для регулирования напряжения для обеспечения законно управления.
Сглаживающий фильтр состоит из сглаживающего дросселя L1 с ферриторным сердечником и конденсатора С1.
АИН собран на 6 тиристорных ключах VS7...VS12 с принудительной коммутацией, которая обеспечивается конденсаторами С2…С7, дросселей L2 и L3, а также коммутационных диодов VD7...VD12.
Диоды VD13...VD18 выполняют функцию отсечения токов при отключениях соответствующих вентилей. Ток в коммутирующих цепях не исчезает из-за индуктивностей обмотки статора.
Функциональная схема системы управления частотного электропривода
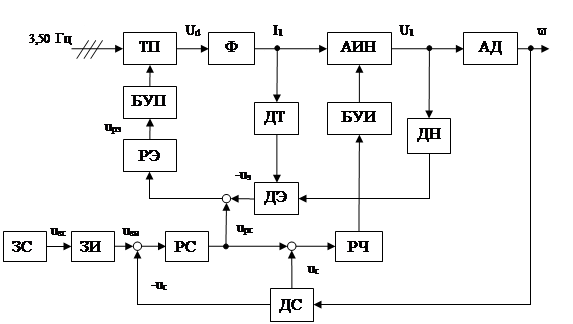 
Рисунок 5 – Функциональная схема скалярной системы подчиненного двухканального управления частотным электроприводом, реализующей закон управления c1
=const
ЗС – задатчик скорости;
ЗИ – задатчик интенсивности;
РС – регулятор скорости;
РЭ – регулятор ЭДС;
БУП – блок управления преобразователем;
ТП – тиристорный преобразователь;
Ф – фильтр;
АИН – автономный инвертор напряжения;
АД – асинхронный двигатель с к. з. ротором;
РЧ – регулятор частоты;
БУП – блок управления инвертором;
ДС – датчик скорости;
ДТ – датчик тока;
ДН – датчик напряжения;
ДЭ – датчик ЭДС.
Система управления построена по принципу двухканальной системы подчиненного регулирования частоты с использованием автономного инвертора напряжения (АИН) с широтно-импульсной модуляцией (ШИМ).
Первый канал управления включает контур регулирования ЭДС, он подчинен внешнему контуру – контуру управления скоростью.
Второй подчиненный контур – контур регулирования частоты.
Для адаптации регулятора частоты к изменениям скорости двигателя при колебаниях нагрузки в нем применяется положительная обратная связь по скорости.
Для стабилизации скорости на валу двигателя на суммирующий вход регулятора скорости подается сигнал отрицательной обратной связи по скорости.
Интенсивность разгона электропривода регулируется задатчиком интенсивности ЗИ.
Остановка электропривода осуществляется снятием сигнала задания скорости на выходе задатчика скорости ЗС. При этом частота напряжения на выходе автономного инвертора напряжения АИН плавно снижается, а двигатель АД переходит в режим рекуперативного торможения.
Реверс производится изменением знака сигнала задания скорости. Логическая схема блока управления инвертором изменяет при этом порядок чередования фаз на выходе инвертора АИН.
Контроль скорости, напряжения и тока осуществляется датчиком скорости ДС, датчиком напряжения ДН и датчиком тока ДТ.
Управление работой ТП осуществляется блоком управления БУП.
Структурная схема скалярной системы управления частотным электроприводом
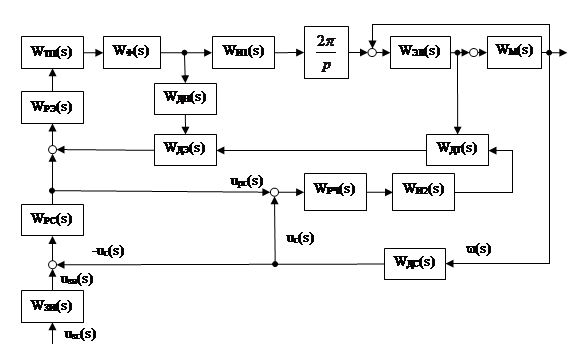 
Рисунок 6 – Структурная схема скалярной системы подчиненного двухканального управления частотным электроприводом, реализующей закон управления c1
=const
Передаточная функция асинхронного двигателя
Передаточная функция электрической части асинхронного двигателя
 . .
Коэффициент жесткости

Номинальный момент двигателя
 Н·м Н·м
Номинальная скорость вращения двигателя
 с-1 с-1
Синхронная частота вращения
 с-1 с-1
Электромагнитная постоянная двигателя
 с с
Критическое скольжение АД

Номинальное скольжение АД

Перегрузочная способность
Передаточная функция механической части двигателя

Суммарный момент инерции, приведенный к валу двигателя

Момент инерции двигателя
 ; ; 
Передаточные функции регуляторов
Передаточная функция П-регулятора скорости
 , где , где 
Передаточная функция ПИ-регулятора ЭДС
 , где , где

Постоянная интегрирования  , где , где с – некомпенсированная постоянная времени ТП. с – некомпенсированная постоянная времени ТП.
Электромеханическая постоянная времени электропривода
 с с
Передаточная функция П-регулятора частоты
 , где , где 

Передаточная функция тиристорного преобразователя
 , где , где 
Передаточная функция сглаживающего фильтра

Постоянная времени сглаживающего фильтра
 , где , где  - частота пульсаций выпрямленного напряжения - частота пульсаций выпрямленного напряжения
Передаточная функция АИН по каналу управления напряжением
 , где , где 
Передаточная функция АИН по каналу управления частоты
 , где , где 
Передаточные функции датчиков обратных связей
Передаточная функция датчика скорости
 , где , где
Значение сигнала обратной связи по скорости
 В, В, 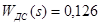
Передаточная функция датчика ЭДС
 где где


Номинальный ток статора определяется по значению момента
 А А

2.2 Оценка статических и динамических свойств системы регулирования скорости частотного электропривода с законом управления Ψ1
= const в среде MatLab
Оценка статических и динамических свойств системы регулирования скорости производится при пуске, набросе, сбросе нагрузки и торможении для номинального, минимального и максимального задания скорости во всех зонах регулирования.
Структурная модель частотного электропривода рольганга с двухзонным регулированием скорости по закону Ψ1
= constв среде MatLab представлена на рис. 2.1.
На рисунке 2.2 приведены полученные графики изменения скорости ω, момента М, напряжения Ud
, частоты f при пуске, набросе, сбросе нагрузки и торможении электропривода при номинальном сигнале задания скорости. Ток статора в модели определяется с помощью блоков Pr, sqrt.
Текущее значение ЭДС статора определяется в модели с помощью блока Sum 5.

Рисунок 7 - Схема структурной модели частотного электропривода с законом управления Ψ1
Рисунок 8 - Графики электромеханических переходных процессов ω(t), М(t), U(t), f1
(t)
Выводы
Управление электроприводами заключается в осуществлении пуска, регулировании скорости, торможения, реверсирования, а также поддержания режима работы привода в соответствии с требованиями технологического процесса.
В простейших случаях пуск, регулирование скорости и торможение осуществляется при помощи аппаратов ручного управления. Применение этих аппаратов связано с дополнительной затратой времени на управление и, следовательно, снижает производительность механизма. Кроме того, применение аппаратов ручного управления исключает возможность дистанционного управления, что неприемлемо в ряде современных автоматизированных установок.
Стремление устранить подобные недостатки ручного управления привело к созданию аппаратов полуавтоматического и автоматического управления.
Автоматическое управление электроприводами является одним из основных условий повышения производительности механизмов и производства продукции высокого качества.
Кроме того, автоматизация упрощает обслуживание механизмов, дает возможность осуществить дистанционное управление электроприводами. Последнее особенно важно там, где нельзя управлять двигателями в непосредственной близости по условиям территориального расположения машин или в связи с особенностями технологического процесса.
Перечень ссылок
1. Панкратов А.И. Выбор электропривода, механизма подъема мостового крана. Учеб. пособие. – Краматорск; ДГМА, 2006-64с.
2. Панкратов А.И. Система управления электроприводом. Учеб. пособие.-Краматорск; ДГМА, 2007-225с.
|