Содержание
1. Цель работы
2. Назначение АИД
3. Конструкция АИД
4. Магнитные поля АИД
5. Вращающий момент АИД
6. Способы управления АИД
7. Самоход и способы его устранения
8. Статические свойства АИД
9. Динамические свойства АИД
10. Программа экспериментальных исследований АИД
11. Расчеты и построения
12. Содержание отчета
13. Контрольные вопросы
Приложение А
Приложение Б
1. Цель работы
В настоящей лабораторной работе изучается назначение, конструкция, принцип действия, а также статические и динамические свойства асинхронного исполнительного двигателя переменного тока (АИД) с полым немагнитным ротором.
2. Назначение АИД
Изучаемый двигатель предназначен для работы в системах управления и автоматики (СУ и А) как преобразователь электрического сигнала, вырабатываемого устройством управления СУ и А, в скорость вращения или угол поворота вала.
Существуют три разновидности асинхронных исполнительных микродвигателей: с полым немагнитным ротором, с полым магнитным ротором и с короткозамкнутой обмоткой типа беличьего колеса. В СУ и А наибольшее распространение получили асинхронные исполнительные двигатели с полым немагнитным ротором. Такие двигатели производятся на мощности от сотых долей до нескольких сотен ватт, для стандартной – 50 Гц. и повышенных частот (200, 400,500 и 1000 Гц.) питающего напряжения. Скорость их вращения лежит в диапазоне 1500¸ 3000 oб/ мин.
Основными достоинствами асинхронных исполнительных двигателей с полым немагнитным ротором являются:
- Малый момент инерции J ротора.
- Значительный пусковой момент вследствие повышенного сопротивления ротора, что совместно с малым J приводит к значительному быстродействию двигателя, малой электромеханической постоянной времени и обеспечивает повышенную устойчивость следящих систем с таким типом двигателей.
- Механическая (выходная, нагрузочная) характеристика двигателя близка к прямолинейной за счёт большого активного сопротивления ротора, обеспечивающего значительное критическое скольжение (то есть скольжение при максимальном моменте  ). ).
- Широкий диапазон регулирования скорости (кратность регулирования  ), отсутствие скачкообразных изменений, прямая пропорциональность скорости напряжению управления, способность к быстрому реверсу (изменению направления вращения), отсутствие высших зубцовых гармоник в кривой поля, что определяет плавность и бесшумность хода. ), отсутствие скачкообразных изменений, прямая пропорциональность скорости напряжению управления, способность к быстрому реверсу (изменению направления вращения), отсутствие высших зубцовых гармоник в кривой поля, что определяет плавность и бесшумность хода.
- Самоторможение двигателя при снятии сигнала управления (определяется большим  ). ).
- Отсутствие подвижных контактов, малый момент трения, отсутствие искрения и радиопомех, стабильность и надёжность в эксплуатации.
- Независимость параметров и характеристик двигателя от температуры, давления, влажности.
- Возможность улучшения массо-габаритных показателей при переходе к повышенным (400 ¸ 500 Гц.) частотам питающего напряжения.
Асинхронный исполнительный двигатель с полым немагнитным ротором имеет следующие недостатки:
- Большой немагнитный зазор в магнитной цепи машины ( ), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности ( ), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности ( ). ).
- Значительное электрическое сопротивление ротора и, как следствие, работа двигателя при больших скольжениях, что приводит к увеличению потерь энергии в статоре и роторе, а также к снижению КПД.
- Относительно увеличенные удельные (то есть приходящиеся на единицу полезной мощности) масса и габариты двигателя.
3. Конструкция АИД
Конструкция АИД должна решать задачу преобразования электрической энергии в механическую, приводящую во вращение вал двигателя с присоединённой нагрузкой (объектом управления). Это преобразование в общем виде описывается законом электромагнитного усилия, который утверждает, что механическая сила возникает при взаимодействии одноимённых полей (электрических или магнитных) и приложена к инерционным источникам этих полей.
В электромагнитных устройствах систем управления взаимодействуют два магнитных поля, причём одно поле должно создаваться той частью машины, которая будет вращаться, а источник второго поля может быть неподвижным. Поэтому в конструкции любой электрической машины имеется неподвижная часть- статор и подвижная- ротор.
В данной лабораторной работе исследуется АИД переменного тока с полым немагнитным ротором. Схема его конструкции показана на рисунке 1, а макет имеется на рабочем столе возле лабораторного стенда.

Рисунок 1 - Схема конструкции асинхронного исполнительного двигателя с полым немагнитным ротором
Неподвижная часть машины состоит из внешнего магнитопровода 5 с обмотками 4,внутреннего магнитопровода 3, корпуса 6, левого 7 и правого 8 подшипниковых щитов с подшипниками 9 и узлов 10 соединения корпуса со щитами. Подвижная часть машины содержит вал 2 с жёстко укреплённым на нём тонкостенным цилиндром 1. Внешний магнитопровод 5 неявнополюсный, представляет собой стальное кольцо собранное из листовой электротехнической стали, по внутренней поверхности которого расположены пазы, в которые укладываются две распределённые обмотки, изготовленные из изолированного медного провода круглого или прямоугольного сечения. Оси этих обмоток смещены в пространстве на 90 электрических градусов. Внутренний магнитопровод 3 также неявнополюсный,набран из листов электоротехнической стали и укреплён на цилиндрическом выступе одного из подшипниковых щитов 7. Он служит для уменьшения магнитного сопротивления на пути рабочего магнитного потока машины и не имеет пазов и обмоток.
В микродвигателях, мощность которых не превышает 1.5 Вт, диаметр расточки статора (внутренний диаметр внешнего магнитопровода 6) мал и для облегчения укладки обмоток пазы выполняют по внешней поверхности внутреннего магнитопровода 3. При этом его диаметр несколько увеличивают для увеличения обмоточного пространства. Иногда одну из обмоток размещают на внешнем, а другую на внутреннем магнитопроводе.
Корпус и подшипниковые щиты в микромашинах выполняются из алюминиевых сплавов. В крупных машинах эти части конструкции выполняются обычно сварными из стальных листов необходимой толщины, реже литыми. Подшипники чаще всего используются шариковые качения, а в крупных машинах - роликовые. Если от двигателя требуется бесшумная работа, применяют подшипники скольжения – бронзовые или бронзографитные. В микромашинах используются полузакрытые пазы для укладки обмоток – рисунок 2. Внутреннюю поверхность паза изолируют 1, заполняют проводниками обмотки 2 и закрепляют проводники деревянными или пластмассовыми клиньями 3. На рисунке 2 показан паз, выполненный на внешнем магнитопроводе, если же его выполнять на внутреннем магнитопроводе, то граница пройдёт по штриховой линии.

Рисунок 2 - Полузакрытый паз магнитопровода
Особенностью рассматриваемого двигателя является конструкция его ротора. Вал ротора 2 свободно вращается в подшипниках 9. На валу жёстко укреплён тонкостенный цилиндр 1, который также именуется стаканом. Стакан выполняется из немагнитного токопроводящего материала, как правило, из алюминиевых сплавов. Данная технология используется для получения минимальной механической инерционности двигателя, то есть для снижения его постоянной времени. Толщина стенок зависит от мощности двигателя и составляет  мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода  мм. Общий воздушный зазор в двигателе мм. Общий воздушный зазор в двигателе мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт. мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт.
4. Магнитные поля АИД
Схема включения асинхронного исполнительного двигателя с полым немагнитным ротором показана на рисунке 3.
Теория вращающихся электромеханических преобразователей энергии показывает, что общее требование к работоспособной электрической машине заключается в том, чтобы магнитные поля ротора и статора обладали одинаковым количеством пар полюсов и были неподвижны относительно друг друга при работе машины в установившемся режиме. Значит, если поле ротора вращается, то для обеспечения неподвижности относительно него, поле статора тоже должно вращаться. Поле статора создаётся токами, протекающими по двум его обмоткам. Одна из них называется обмоткой возбуждения ОВ и постоянно находится под напряжением  . Втораяобмотка расположена перпендикулярно обмотке возбуждения и называется обмоткой управления ОУ. Напряжение . Втораяобмотка расположена перпендикулярно обмотке возбуждения и называется обмоткой управления ОУ. Напряжение  на обмотку на обмотку
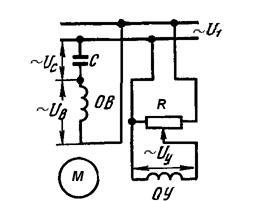
Рисунок 3 - Схема включения АИД
управления подаётся от устройства управления лишь в том случае если необходимо вращение ротора. Такая машина называется двухфазной. Чтобы эти две обмотки создавали вращающееся поле, их необходимо питать токами  и и  , сдвинутыми относительно друг друга во времени (по фазе). Процесс создания вращающегося поля в двухфазной машине, когда обмотки статора сдвинуты в пространстве на 90 электрических градусов и питаются токами, сдвинутыми по фазе на 90 градусов, показан на рисунке 4. В момент времени t=t0
суммарное поле , сдвинутыми относительно друг друга во времени (по фазе). Процесс создания вращающегося поля в двухфазной машине, когда обмотки статора сдвинуты в пространстве на 90 электрических градусов и питаются токами, сдвинутыми по фазе на 90 градусов, показан на рисунке 4. В момент времени t=t0
суммарное поле  равно полю возбуждения равно полю возбуждения  , так как ток , так как ток  максимален, а ток максимален, а ток  в обмотке управления в этот момент равен нулю. В момент t=t1
имеем wt=45°, в обмотке управления в этот момент равен нулю. В момент t=t1
имеем wt=45°,  , ,  , ,  . При t=t2
имеем wt=90°, . При t=t2
имеем wt=90°,  , ,  , ,  и т. д. Очевидно, суммарный вектор и т. д. Очевидно, суммарный вектор  по величине остаётся неизменным и равным по величине остаётся неизменным и равным  , а по направлению , а по направлению
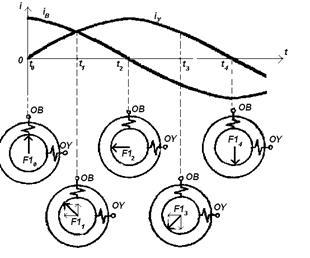
Рисунок 4 - Создание вращающегося магнитного поля двухфазным статором
вращается против часовой стрелки. Скорость вращения w1 или n
1 результирующего поля статора определяется частотой питающей сети f1 и числом пар полюсов обмоток статора p
:
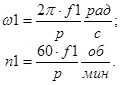 (1) (1)
Поле статора  создаёт поток, большая часть которого создаёт поток, большая часть которого  выходит из внешнего магнитопровода, пересекает воздушный зазор δ1- рисунок 1, затем стенку ротора δ3, воздушный зазор выходит из внешнего магнитопровода, пересекает воздушный зазор δ1- рисунок 1, затем стенку ротора δ3, воздушный зазор  , проходит по внутреннему магнитопроводу, снова проходит воздушные зазоры и стенку ротора, входит уже с другой стороны диаметра во внешний магнитопровод и замыкается по нему. Данный поток именуется основным потоком обмоток статора. Меньшая часть поля статора , проходит по внутреннему магнитопроводу, снова проходит воздушные зазоры и стенку ротора, входит уже с другой стороны диаметра во внешний магнитопровод и замыкается по нему. Данный поток именуется основным потоком обмоток статора. Меньшая часть поля статора  сцепляется только с витками обмоток статора и называется потоком рассеивания статора, который определяет индуктивные сопротивления обмоток статора. сцепляется только с витками обмоток статора и называется потоком рассеивания статора, который определяет индуктивные сопротивления обмоток статора.
Основной поток статора, вращаясь, пересекает стенки стакана ротора и индуцирует в них ЭДС, под действием которой в роторе начинают протекать значительные электрические токи, так как материал ротора токопроводящий с незначительным электрическим сопротивлением. Эти токи создают собственное магнитное поле, которое вызывает основной магнитный поток  ротора, сцеплённый с обмотками статора и ротора, а также поток рассеивания ротора - ротора, сцеплённый с обмотками статора и ротора, а также поток рассеивания ротора - , значительно меньший основного и сцеплённый только с ротором. Данный поток определяет индуктивность ротора. , значительно меньший основного и сцеплённый только с ротором. Данный поток определяет индуктивность ротора.
Таким образом, в магнитопроводе асинхронного исполнительного двигателя существуют два магнитных поля: вращающееся поле неподвижного статора и поле  ротора, также вращающееся. Определим его скорость ротора, также вращающееся. Определим его скорость  относительно ротора, вращающегося со скоростью относительно ротора, вращающегося со скоростью  . Разность между скоростью вращения ротора и скоростью вращения поля статора называется частотой скольжения . Разность между скоростью вращения ротора и скоростью вращения поля статора называется частотой скольжения 
 ; (2) ; (2)
а отношение
 (3) (3)
называется скольжением. Чтобы в роторе наводилась ЭДС  , его скорость всегда должна быть меньше скорости поля статора. Чем больше разность скоростей, то есть чем больше , его скорость всегда должна быть меньше скорости поля статора. Чем больше разность скоростей, то есть чем больше  , тем больше ЭДС и токи в роторе. Значит скольжение асинхронного двигателя, как и скорость вращения ротора зависят от нагрузки - с увеличением нагрузки ток ротора увеличиваеться, а скорость вращения уменьшаться. Из (3) и (1) имеем , тем больше ЭДС и токи в роторе. Значит скольжение асинхронного двигателя, как и скорость вращения ротора зависят от нагрузки - с увеличением нагрузки ток ротора увеличиваеться, а скорость вращения уменьшаться. Из (3) и (1) имеем
 . (4) . (4)
Частота ЭДС в роторе  равна равна
 . (5) . (5)
Токи ротора, изменяясь с такой же частотой, создают поле ротора, которое вращается относительно ротора со скоростью в ту же сторону, что и ротор :
 . (6) . (6)
Скорость вращения поля ротора относительно статора  равна сумме скоростей ротора и скорости вращения поля относительно ротора : равна сумме скоростей ротора и скорости вращения поля относительно ротора :
 . (7) . (7)
Значит, поле ротора неподвижно относительно статора и требование к работоспособности машины выполнено.
Поля  и и  складываются в магнитопроводе и образуют основное поле двигателя, которое, как и в трансформаторе, при изменении нагрузки (а значит и полей складываются в магнитопроводе и образуют основное поле двигателя, которое, как и в трансформаторе, при изменении нагрузки (а значит и полей  и и  ) от нуля до номинального значения остаётся практически неизменным и примерно равным полю холостого хода ) от нуля до номинального значения остаётся практически неизменным и примерно равным полю холостого хода  : :
 . (8) . (8)
5. Вращающий момент АИД
Взаимодействие магнитных полей статора и ротора приводит к появлению механического вращающего момента, приложенного как к статору, так и к ротору. Статор укреплён неподвижно и приложенный к нему момент компенсируется реакцией элементов крепления. Ротор установлен в шарикоподшипниках и начинает раскручиваться до некоторой установившейся скорости , которая определяется условием равновесия твёрдого вращающегося тела: сумма механических моментов приложенных к телу должна быть равна нулю: , которая определяется условием равновесия твёрдого вращающегося тела: сумма механических моментов приложенных к телу должна быть равна нулю:
 . (9) . (9)
Весь процесс преобразования поданной на двигатель электрической энергии в механическую энергию вращения ротора с нагрузкой отображается схемой преобразований, приведенной на рисунке 5.
На электрические цепи возбуждения и управления подаются напряжения соответственно возбуждения  и управления и управления  . Напряжение возбуждения неизменно и его можно считать питанием устройства, напряжение управления задается устройством управления. Поданные напряжения элементарными преобразователями ЭП1 и ЭП2 преобразуются в токи и . . Напряжение возбуждения неизменно и его можно считать питанием устройства, напряжение управления задается устройством управления. Поданные напряжения элементарными преобразователями ЭП1 и ЭП2 преобразуются в токи и .
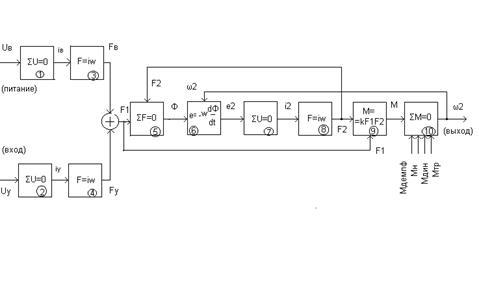
Рисунок 5 - Схема преобразований сигнала в АИД
Это преобразование описывается условием равновесия электрической цепи: сумма ЭДС, разностей потенциалов и падений напряжений в электрической цепи равна нулю (иначе, интегральная форма материального уравнения или закона Ома для электрической цепи, второе правило Кирхгофа), которое  усл усл овно в ЭП1 и ЭП2 записано как овно в ЭП1 и ЭП2 записано как  . Токи, протекая по обмоткам, создают намагничивающие силы . Токи, протекая по обмоткам, создают намагничивающие силы  и и  – ЭП3 и ЭП4 (закон полного тока), действующие в магнитных цепях машины и складывающиеся во вращающееся поле . Следующее преобразование ЭП5 приводит к появлению магнитного потока – ЭП3 и ЭП4 (закон полного тока), действующие в магнитных цепях машины и складывающиеся во вращающееся поле . Следующее преобразование ЭП5 приводит к появлению магнитного потока  и описывается условием равновесия магнитной цепи: сумма намагничивающих сил и падений магнитного напряжения в магнитной цепи равно нулю (второе правило Кирхгофа для магнитной цепи), что условно записано в ЭП5 как и описывается условием равновесия магнитной цепи: сумма намагничивающих сил и падений магнитного напряжения в магнитной цепи равно нулю (второе правило Кирхгофа для магнитной цепи), что условно записано в ЭП5 как  . Магнитный поток вращается, пересекает ротор и согласно закону электромагнитной индукции наводит в нём ЭДС – ЭП6. В роторе возникает электрический ток . Магнитный поток вращается, пересекает ротор и согласно закону электромагнитной индукции наводит в нём ЭДС – ЭП6. В роторе возникает электрический ток  , что также описывается условием равновесия электрической цепи - ЭП7. Этот ток создаёт свою намагничивающую силу - ЭП8,которая действует в магнитопроводе машины и совместно с определяют F в ЭП5. Взаимодействие полей и согласно закона электромагнитного усилия создаёт механический вращающий момент , что также описывается условием равновесия электрической цепи - ЭП7. Этот ток создаёт свою намагничивающую силу - ЭП8,которая действует в магнитопроводе машины и совместно с определяют F в ЭП5. Взаимодействие полей и согласно закона электромагнитного усилия создаёт механический вращающий момент  , что отображено элементом ЭП9 и условной записью в нём , что отображено элементом ЭП9 и условной записью в нём  . Вращающий момент и другие моменты, действующие на ротор – момент нагрузки . Вращающий момент и другие моменты, действующие на ротор – момент нагрузки  , демпфирующий момент , демпфирующий момент , динамический момент , динамический момент и момент трения и момент трения  , определяют скорость вращения ротора , определяют скорость вращения ротора  , что описывается уравнением равновесия твёрдого тела: , что описывается уравнением равновесия твёрдого тела:  - ЭП10. Скорость является выходным сигналом машины. Кроме того, совместно с Ф определяет величину ЭДС в роторе и поэтому подана на ЭП6. Цепи на ЭП5 и на ЭП6 показывают наличие в двигателе внутренних отрицательных обратных связей. На рисунке 5 не показаны падения электрического напряжения на активных сопротивлениях цепей управления, возбуждения и ротора, ЭДС, индуцированные в обмотках возбуждения и управления потоком Ф, падение магнитного напряжения в магнитном сопротивлении магнитопровода. Эти преобразования носят вспомогательный характер, однако о них следует помнить и понимать, что они тоже являются отрицательными обратными связями, обеспечивающими устойчивую работу двигателя. - ЭП10. Скорость является выходным сигналом машины. Кроме того, совместно с Ф определяет величину ЭДС в роторе и поэтому подана на ЭП6. Цепи на ЭП5 и на ЭП6 показывают наличие в двигателе внутренних отрицательных обратных связей. На рисунке 5 не показаны падения электрического напряжения на активных сопротивлениях цепей управления, возбуждения и ротора, ЭДС, индуцированные в обмотках возбуждения и управления потоком Ф, падение магнитного напряжения в магнитном сопротивлении магнитопровода. Эти преобразования носят вспомогательный характер, однако о них следует помнить и понимать, что они тоже являются отрицательными обратными связями, обеспечивающими устойчивую работу двигателя.
Схема преобразований даёт качественную картину работы двигателя. Количественный анализ работы, основанный на законах, указанных на схеме, позволяет найти выражение для момента, развиваемого двигателем:
 ; (10) ; (10)
где  - число фаз обмотки статора; - число фаз обмотки статора;
 , , - активное и реактивное сопротивления обмотки статора; - активное и реактивное сопротивления обмотки статора;
 , , - активное и реактивное сопротивления ротора, приведённые к числам витков и фаз обмоток статора; - активное и реактивное сопротивления ротора, приведённые к числам витков и фаз обмоток статора;
 - коэффициент приведения параметров АИД к Г-образной схеме замещения; - коэффициент приведения параметров АИД к Г-образной схеме замещения;
Это выражение можно понимать так:
 (11) (11)
где  - электромагнитная мощность, передаваемая от статора к ротору магнитным полем, вращающимся с угловой скоростью - электромагнитная мощность, передаваемая от статора к ротору магнитным полем, вращающимся с угловой скоростью  . .
Годограф вектора вращающегося поля статора может иметь вид окружности или эллипса. Поле будет круговым если выполнены условия:
1)Токи и сдвинуты по фазе на угол
 ; (12) ; (12)
где  - пространственный сдвиг осей обмоток возбуждения и управления. - пространственный сдвиг осей обмоток возбуждения и управления.
2)Намагничивающие силы обмоток статора равны между собой  . .
Обычно задаётся равным 90 электрических градусов, так как в таком случае вращающееся поле имеет максимальную величину
 . (13) . (13)
Поэтому сдвиг фаз токов и также задаётся равным 90°.
Если одно или оба из этих условий не выполняются, то поле становится эллиптическим, а мгновенная частота вращения вектора поля - непостоянной. Чем больше отклонение от указанных условий, тем в большей степени поле отличается от кругового. Эллиптическое поле может быть представлено суммой двух неравных по величине круговых полей, вращающихся в противоположные стороны с одинаковой по абсолютной величине скоростью  . Прямое поле имеет постоянную максимальную амплитуду (13), а амплитуда обратного поля тем больше чем существеннее отклонения от указанных условий. Прямое поле создаёт полезный вращающий момент . Прямое поле имеет постоянную максимальную амплитуду (13), а амплитуда обратного поля тем больше чем существеннее отклонения от указанных условий. Прямое поле создаёт полезный вращающий момент  , а обратное – тормозящий момент , а обратное – тормозящий момент  , так что итоговый момент , так что итоговый момент  , развиваемый двигателем, равен , развиваемый двигателем, равен
 . (14) . (14)
Выражение (10) справедливо, когда  ,т.е. когда поле статора круговое, при эллиптическом же поле момент равен ,т.е. когда поле статора круговое, при эллиптическом же поле момент равен
 ; (15) ; (15)
где  - ток обмотки управления, приведенный к числу витков обмотки возбуждения; - ток обмотки управления, приведенный к числу витков обмотки возбуждения;
 - фазы напряжений управления и возбуждения соответственно; - фазы напряжений управления и возбуждения соответственно;
 ; ;
 активное и реактивное сопротивления ротора, приведенные к активное и реактивное сопротивления ротора, приведенные к
обмотке статора;
 реактивное сопротивление намагничивания двигателя, приведенное к обмотке возбуждения. реактивное сопротивление намагничивания двигателя, приведенное к обмотке возбуждения.
Выражение (15) как и (10) можно представить в виде (11).
6. Способы управления АИД
Таким образом, меняя степень выполнения условий кругового поля можно менять результирующий вращающий момент, развиваемый двигателем, а значит менять скорость его вращения, то есть управлять двигателем. Отсюда три, применяемых на практике, способа управления АИД:
1)Амплитудное управление, когда меняется  по амплитуде при неизменной фазе; по амплитуде при неизменной фазе;
2)Фазовое управление, когда меняется фаза при неизменной амплитуде;
3)Амплтудно-фазовое управление, когда одновременно меняются и фаза и амплитуда .
Анализ работы АИД при разных способах управления показывает, что амплитудное и амплитудно-фазовое управления дают практически одинаковые характеристики двигателя, а при фазовом управлении требуется повышенная мощность от устройства управления, особенно при малых сигналах управления. Кроме того, практическая реализация амплитудного и фазового управления схемно более сложна. Поэтому реальное применение находит только амплитудно-фазовое управление, которое и рассмотрено далее.
Амплитудно-фазовое управление реализуется с помощью схемы, показанной на рисунке 3. Для обеспечения сдвига фаз между и   в цепь обмотки возбуждения включается конденсатор в цепь обмотки возбуждения включается конденсатор . Величина его ёмкости рассчитывается из условия получения кругового поля при пуске двигателя. Изменение управляющего напряжения с помощью потенциометра . Величина его ёмкости рассчитывается из условия получения кругового поля при пуске двигателя. Изменение управляющего напряжения с помощью потенциометра  изменяет также и угол изменяет также и угол  . Это объясняется тем, что . Это объясняется тем, что  , ,  а ток возбуждения а ток возбуждения  меняется при изменении меняется при изменении  Недостаток всех трёх методов управления АИД - малая экономичность, так как из-за наличия обратного поля в статоре и роторе возникают значительные электрические потери. Недостаток всех трёх методов управления АИД - малая экономичность, так как из-за наличия обратного поля в статоре и роторе возникают значительные электрические потери.
7. Явление самохода и способы его устранения
Двигатель имеет самоход, если его ротор вращается при отсутствии сигнала управления. Практически, этот режим может возникнуть, когда подано только напряжение возбуждения – это технологический самоход, или когда снимается поданное ранее напряжение управления - методический (параметрический) самоход.
Причиной технологического самохода является появление слабого эллиптического поля, порождённого паразитными токами. Причиной появления последних может служить либо замыкание между листами стали магнитопровода статора, либо наличие короткозамкнутых витков в обмотках, либо разная магнитная проводимость машины в различных радиальных направлениях, либо изменение толщины стенок ротора по его окружности и прочее. Устранить этот вид самохода можно при тщательном контроле за технологией изготовления двигателя.
Методический самоход может возникнуть когда сигнал управления снимается, а нагрузка на валу двигателя незначительна. Анализ явления показывает, что причина заключается в малом активном сопротивлении ротора. Для устранения этого вида самохода активное сопротивление ротора делают весьма значительным, выполняя стакан из алюминиевых сплавов с относительно низкой проводимостью. К сожалению, это одновременно ухудшает энергетические параметры двигателя: снижается к.п.д., уменьшается выходная мощность на валу, падает пусковой момент. Именно поэтому номинальная мощность исполнительных двигателей в два- три раза ниже номинальной мощности силовых асинхронных двигателей (для которых характерно малое  ) тех же габаритов. ) тех же габаритов.
8. Статические свойства АИД
О статических свойствах АИД судят по его характеристикам, которые для универсальности, то есть для возможности сравнения свойств двигателей разных мощностей, скоростей вращения и т.п., строят в относительных единицах. При этом за базовые (единичные) величины принимают постоянные для любого двигателя параметры: пусковой момент  при круговом вращающемся поле; синхронную скорость вращения при круговом вращающемся поле; синхронную скорость вращения  ; мощность ; мощность  , потребляемую двигателем при пуске при круговом поле; номинальное напряжение управления , потребляемую двигателем при пуске при круговом поле; номинальное напряжение управления  , при котором получается круговое вращающееся поле при пуске. Вращающий момент , при котором получается круговое вращающееся поле при пуске. Вращающий момент  , скорость вращения , скорость вращения  , мощность на выходе , мощность на выходе  , напряжение управления, или иначе, коэффициент сигнала , напряжение управления, или иначе, коэффициент сигнала  в относительных единицах находятся как отношение действительных величин в относительных единицах находятся как отношение действительных величин к соответствующим базовым величинам: к соответствующим базовым величинам:
 (16) (16)
Кроме того, для отображения разных способов управления вводят ещёследующие относительные единицы:
-эффективный коэффициент сигнала
   (17) (17)
где  -коэффициент приведения обмоток статора. -коэффициент приведения обмоток статора.
-коэффициент сигнала при фазовом управлении -  , ,
где  - угол сдвига фазы между напряжениями управления - угол сдвига фазы между напряжениями управления  и возбуждения и возбуждения  . .
-номинальный коэффициент сигнала
 ; (18) ; (18)
где  - напряжение питающей двигатель сети – рисунок 3. - напряжение питающей двигатель сети – рисунок 3.
Как и у любого устройства автоматики основными статическими характеристиками АИД являются:
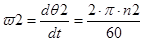
1)Характеристика преобразования вход-выход которая для двигателей называется регулировочной. Она представляет собой зависимость скорости вращения от величины или фазы сигнала управления при постоянном моменте сопротивлении на валу. Семейства этих характеристик для различных способов управления представлены на рисунке 6. Зависимость  является регулировочной характеристикой для амплитудного управления; является регулировочной характеристикой для амплитудного управления;  - для фазового управления; - для фазового управления;  - для амплитудно-фазового управления. - для амплитудно-фазового управления.
Эти характеристики нелинейны, наиболее линейные участки лежат в области малых  , то есть в начальной части графиков. Поэтому на практике стараются работать в зоне малых , для чего применяют двигатели, рассчитанные на повышенные частоты , то есть в начальной части графиков. Поэтому на практике стараются работать в зоне малых , для чего применяют двигатели, рассчитанные на повышенные частоты  переменного тока, так как переменного тока, так как
 . (19) . (19)
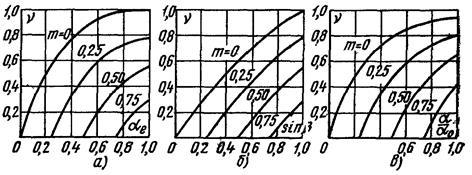
Рисунок 6 - Регулировачные характеристики асинхронного исполнительного двигателя с полым немагнитным ротором
Регулировочные характеристики показывают также, что напряжение трогания двигателя, то есть минимальное  , при котором ротор, имея определённую нагрузку на валу, трогается с места, пропорционально моменту нагрузки , при котором ротор, имея определённую нагрузку на валу, трогается с места, пропорционально моменту нагрузки  в действительных величинах, а в относительных величинах равно моменту нагрузки в действительных величинах, а в относительных величинах равно моменту нагрузки  , или , или  , или , или  для соответствующих способов управления. для соответствующих способов управления.
2)Характеристика нагрузочная, которая у двигателей называется механической, представляет собой зависимость вращающего момента от скорости вращения при постоянном сигнале управления:
 (20) (20)
Из механических характеристик видно, что вращающий момент и скорость вращения достигают своих максимальных значений при единичном коэффициенте сигнала. Механические характеристики при всех способах управления носят нелинейный характер. Меньше всего нелинейность

Рисунок 7 - Механические характеристики асинхронного исполнительного двигателя с полым немагнитным ротором для разных способов управления
проявляется при фазовом управлении, а больше всего при амплитудно-фазовом. Однако при амплитудно-фазовом управлении двигатель развивает больший момент на средних скоростях вращения, так как в этом случае  возрастает с увеличением , а не остаётся постоянным как при других способах управления. При амплитудно-фазовом управлении наблюдается также наименьшая скорость холостого хода, так как при этом типе управления в магнитопроводе машины всегда имеется обратное вращающееся поле, кроме случая пускового режима при возрастает с увеличением , а не остаётся постоянным как при других способах управления. При амплитудно-фазовом управлении наблюдается также наименьшая скорость холостого хода, так как при этом типе управления в магнитопроводе машины всегда имеется обратное вращающееся поле, кроме случая пускового режима при  и и  . .
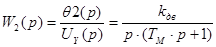
3)Характеристика рабочая – зависимость выходной мощности от скорости вращения вала двигателя при постоянном сигнале управления:
 . (21) . (21)
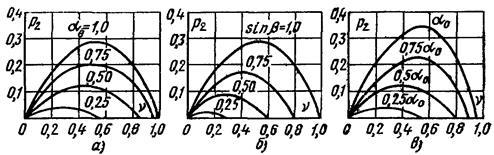
Рисунок 8 - Зависимость механической мощности на валу от скорости вращения асинхронного исполнительного двигателя с полым немагнитным ротором при разных способах управления
Эти характеристики нетрудно получить из механических, так как
 . (22) . (22)
Обычно максимальное значение  принимают за номинальное её значение и соответствующую скорость вращения также считают номинальной. Для разных способов управления эти величины различны, наибольшие они при амплитудно-фазовом управлении. принимают за номинальное её значение и соответствующую скорость вращения также считают номинальной. Для разных способов управления эти величины различны, наибольшие они при амплитудно-фазовом управлении.
9. Динамические свойства АИД
В асинхронных исполнительных двигателях имеются значительные индуктивности и подвижные инерционные массы. Поэтому в этих двигателях наблюдаются и электромагнитные и механические переходные процессы. Однако первыми при практических расчётах обычно пренебрегают, так как их длительность в несколько раз меньше длительности вторых. Но даже в этом случае точные аналитические выражения для переходной характеристики и передаточной функции АИД получаются весьма громоздкими ввиду нелинейности механических и регулировочных характеристик. Поэтому при расчётах применяют линеаризацию (полную или на отрезке) этих кривых. На линейных участках динамические свойства АИД описываются следующей моделью:
 ; (23) ; (23)
 ; (24) ; (24)
 . (25) . (25)
где
 - описывается (1); - описывается (1);
 - угол поворота ротора; - угол поворота ротора;
 - угловая скорость вращения ротора: - угловая скорость вращения ротора:
 ; (26) ; (26)
 -коэффициент передачи двигателя: -коэффициент передачи двигателя:
 ; (27) ; (27)
 - коэффициент управления по напряжению: - коэффициент управления по напряжению:
 . (28) . (28)
Для регулировочной характеристики обычно применяют полную линеаризацию – рисунок 9, тогда
 ; (29) ; (29)
 - коэффициент внутреннего демпфирования, определяющий жёсткость рассматриваемого участка механической характеристики: - коэффициент внутреннего демпфирования, определяющий жёсткость рассматриваемого участка механической характеристики:
 ; (30) ; (30)
Если используется линеаризация механической характеристики, то
 ; (31) ; (31)
где  - угол наклона линии, замещающей рассматриваемый участок характеристики, к оси скоростей – рисунок 9. - угол наклона линии, замещающей рассматриваемый участок характеристики, к оси скоростей – рисунок 9.

Рисунок 9 - Линеаризация механической (а) и регулировочной (б) характеристик асинхронного исполнительного двигателя с полым немагнитным ротором
Рекомендуется применять линеаризацию на участке номинальной работы с помощью секущей АС, что даёт параметры передаточной функции, близкие к номинальным, и тогда их можно вычислить по паспортным данным двигателя.
 ; (32) ; (32)
 ; (33) ; (33)
где  -электромеханическая постоянная времени АИД, то есть время, в течение которого ротор ненагруженного двигателя, обладающего моментом инерции -электромеханическая постоянная времени АИД, то есть время, в течение которого ротор ненагруженного двигателя, обладающего моментом инерции  , разгоняется от неподвижного состояния до скорости идеального холостого хода , разгоняется от неподвижного состояния до скорости идеального холостого хода  , равной синхронной скорости , равной синхронной скорости  - см. (1). Кроме того, при необходимости электромеханическую постоянную времени для амплитудного и амплитудно-фазового управления можно вычислить по приближённой формуле - см. (1). Кроме того, при необходимости электромеханическую постоянную времени для амплитудного и амплитудно-фазового управления можно вычислить по приближённой формуле
 ; (34) ; (34)
а для фазового управления
 . (35) . (35)
Однако нужно учитывать, что формулы (34) и (35) дают несколько завышенные (до 15%) значения  . .
Увеличение частоты питающей сети и уменьшение числа пар полюсов  приводит к росту , так как возрастает синхронная скорость приводит к росту , так как возрастает синхронная скорость  . Для снижения при проектировании АИД рекомендуются следующие меры: . Для снижения при проектировании АИД рекомендуются следующие меры:
1)снижение момента инерции ротора , как, например, у полого немагнитного ротора;
2)увеличение пускового момента за счёт совершенствования конструкции, уменьшения воздушного зазора.
Итак, асинхронный исполнительный двигатель с полым немагнитным ротором в динамическом отношении является инерционным звеном первого порядка (24), если за выходной сигнал принимается скорость вращения вала, или инерционным интегрирующим звеном (25) если выходным сигналом будет угол поворота вала двигателя.
10. Программа экспериментальных исследований АИД
1) Ознакомиться с конструкцией асинхронного исполнительного двигателя с полым немагнитным ротором, представленной в разобранном виде на стенде.
2) Ознакомиться с лабораторным макетом для проведения экспериментальных исследований. Определить назначение измерительной, регулирующей и коммутирующей аппаратуры макета.
3) Снять зависимость пускового момента от напряжения управления и от величины ёмкости в цепи обмотки возбуждения. Для этого:
3.1)Затормозить диск электромагнитного тормоза относительно его электромагнитов.
3.2)Переключателем S3 включить ёмкость С1 и тумблером S1 подать напряжение возбуждения – смотри Приложение Б. Записать значение .
3.3)Включить тумблер S2, и, задавая с помощью ЛАТР Т1 величины напряжения управления ,указанные в таблице 1,отсчитывать соответствующие величины пускового момента  и заносить их в таблицу 1. и заносить их в таблицу 1.
3.4)Повторить п. 10.3.3. для емкостей С2 и С3. Переключение емкостей производится с помощью S3.
3.5)Растормозить диск электромагнитного тормоза. Вывести ЛАТР Т1 в ноль. Выключить S1 и S2, а переключателем S3 включить С2.
Таблица 1 - Данные эксперимента по пункту 3
 |
0 |
30 |
50 |
70 |
90 |
110 |
125 |
|
C1 |
| C2 |
| C3 |
4)Снять рабочие и механические характеристики двигателя, для чего выполнить следующие действия:
4.1)Включить напряжение возбуждения (S1) и управления (S2) и с помощью ЛАТР Т1 задать В. В.
4.2)С помощью ЛАТР Т2 задавать значения М от 0 до 14 г*дм через 2 г*дм и заносить в таблицу 2 соответствующие показания измерительных приборов для  . .
4.3)С помощью ЛАТР Т1 задать  В и повторить п. 10.4.2., кроме точки В и повторить п. 10.4.2., кроме точки  гр*дм. гр*дм.
4.4)вести в ноль ЛАТР Т1 и ЛАТР Т2. Выключить S1 и S2.
Таблица 2 - Данные эксперимента по пункту 4
| Экспериментальные величины |
Расчётные величины |
|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
|
| Гдм |
об/мин |
мА |
мА |
Вт |
Вт |
Вт |
Вт |
% |
о.е. |
о.е. |
При В,  ; ; |
5)Снять регулировочные характеристики АИД, для чего выполнить следующие действия:
5.1)Включить S1 и S2, подать В и убедиться, что  . .
5.2)С помощью ЛАТР Т1 задавать значения , указанные в таблице 1, с помощью измерительных приборов отсчитывать показания  и заносить их в таблицу 3. и заносить их в таблицу 3.
5.3)Установить В, задать с помощь ЛАТР Т2  Н*см, повторить п. 10.5.2. Н*см, повторить п. 10.5.2.
5.4)Вывести ЛАТР Т1 и ЛАТР Т2 в ноль. Выключить S1 и S2. Вынуть вилки ХР1 и ХР2 питания ЛАТРов из розеток.
Таблица 3 - Данные эксперимента по пункту 5
| Экспериментальные величины |
Расчётные величины |
|
|
|
|
|
|
|
|
|
|
|
|
| В |
об/мин |
мА |
мА |
Вт |
Вт |
Вт |
Вт |
о.е. |
о.е. |
| При г*дм |
| При г*дм |
11. Расчёты и построения
1) Построить зависимости пускового момента  при трёх значениях С в одной системе координат (семейство характеристик). Определить при трёх значениях С в одной системе координат (семейство характеристик). Определить  , как максимальное значение пускового момента, и величину С0
, при котором он достигнут. 2) Произвести необходимые расчёты и заполнить расчётную часть таблицы 2 и таблицы 3. Использовать формулы: , как максимальное значение пускового момента, и величину С0
, при котором он достигнут. 2) Произвести необходимые расчёты и заполнить расчётную часть таблицы 2 и таблицы 3. Использовать формулы:
 , Вт; , Вт;
 , Вт; , Вт;
 , %; , %;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
где  для исследуемого двигателя; для исследуемого двигателя;
 ; ;
 В. В.
3)Построить семейство механических характеристик для и  . .
4)Построить три семейства рабочих характеристик: , ,  , ,  в размерных единицах для и на трёх рисунках и определить номинальную скорость вращения в размерных единицах для и на трёх рисунках и определить номинальную скорость вращения  согласно рекомендациям пункта 8.3. согласно рекомендациям пункта 8.3.
5)Построить семейство регулировочных характеристик  для двух значений ; используя величину , полученную в п. 11.4., определить для двух значений ; используя величину , полученную в п. 11.4., определить  . .
6)Используя паспортные данные из Приложения А и формулы (27), (29), (32), (33) рассчитать динамические параметры двигателя  и записать его передаточные функции (24), когда выходным сигналом является угловая скорость вращения, и (25), когда выходным сигналом является угол поворота ротора. При расчётах нужно быть внимательным к размерности величин: следует брать в Н*м; в об/мин; в кг*м2
. и записать его передаточные функции (24), когда выходным сигналом является угловая скорость вращения, и (25), когда выходным сигналом является угол поворота ротора. При расчётах нужно быть внимательным к размерности величин: следует брать в Н*м; в об/мин; в кг*м2
.
7)Эти же динамические параметры рассчитать по экспериментально найденным  и сравнить с величинами из пункта 11.6. и сравнить с величинами из пункта 11.6.
12. Содержание отчёта
1)Цель работы.
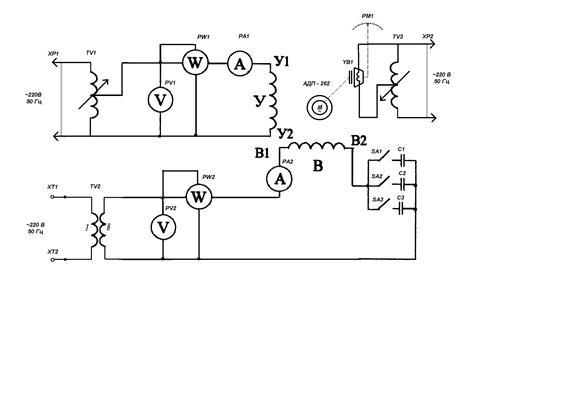
2)Схема электрическая принципиальная лабораторного макета.
3)Таблицы экспериментальных данных и расчётных величин.
4)Расчёты.
5)Рисунки семейств характеристик, указанных в п.п.11.1, 11.3, 11.4 и 11.5.
6)Выводы по работе.
13. Контрольные вопросы
)Назначение асинхронного исполнительного двигателя?
2)Достоинства и недостатки асинхронного исполнительного двигателя с полым немагнитным ротором?
3)Как устроен асинхронный исполнительный двигатель с полым немагнитным ротором?
4)При каких условиях в двухфазном асинхронном исполнительном двигателе создается вращающееся магнитное поле?
5)По какому пути замыкаются силовые линии магнитного поля статора?
6)Когда вращающееся магнитное поле статора будет круговым, когда эллиптическим? Чем определяется степень эллиптичности поля?
7)Как возникает магнитное поле полого немагнитного ротора?
8)Почему скорость вращения ротора всегда меньше скорости вращения поля статора?
9)Как возникает механический вращающий момент в асинхронном исполнительном двигателе?
10)Какие существуют способы управления асинхронным исполнительным двигателем?
11)Что такое самоход асинхронного исполнительного двигателя? Виды самохода и его причины?
12)Виды статических характеристик асинхронного исполнительного двигателя с полым немагнитным ротором?
13)Чем вызваны переходные процессы в асинхронном исполнительном двигателе? Какой инерционностью при анализе динамики двигателя пренебрегают и почему?
14)Что представляет собой асинхронный исполнительный двигатель с полым немагнитным ротором в динамическом отношении когда его выходным сигналом является угол поворота вала или когда скорость вращения вала?
15)Как называются динамические параметры асинхронного исполнительного двигателя? Их связь между собой?
Приложении е А
Технические характеристики двигателя АДП-262
В лабораторной работе исследуется асинхронный исполнительный двигатель с полым немагнитным ротором типа АДП-262, имеющий следующие технические характеристики:
- номинальная частота 50 Гц;
- номинальная полезная мощность 9,5 Вт;
- потребляемая мощность 47,5 Вт;
- номинальная скорость вращения 1850 об/мин;
- скорость вращения холостого хода 2650 об/мин;
- номинальный вращающий момент 5,0 Н*см;
- пусковой момент 9,0 Н*см;
- обмотка возбуждения (сетевая):
- номинальное напряжение 110 В;
- номинальный ток 0,23 А;
- номинальная мощность возбуждения 23 Вт;
- ёмкость в цепи обмотки 2,5 мкФ;
- активное сопротивление обмотки 190 Ом;
- обмотка управления:
- максимальное напряжение 125 В;
- напряжение трогания 2 В;
- номинальный ток управления 0,58 А;
- ток управления при пуске 0,6 А;
- номинальная мощность управления 26 Вт;
- активное сопротивление обмотки 38 Ом;
- момент трогания ненагруженного ротора 0,08 Н*см;
- момент инерции ротора 166*10-7 кг
*м2
;
- электромеханическая постоянная времени 0,055 с;
- к.п.д. 20%;
- вес двигателя 1,6 кг;
- габариты Ф70*122 мм.
Приложение Б
Схема электрическая принципиальная лабораторного макета
|