Поняття та класифікація систем радіоавтоматики
1. Основні поняття та визначення
Сукупність пристроїв, що забезпечують автоматичний процес керування, називається автоматичною системою.
Основними елементами автоматичної системи є об'єкт керування і керуючий пристрій.
Будь-яка автоматична система є інформаційною системою, оскільки усередині її циркулюють потоки інформації.
Носіями інформації є сигнали.
Інформацією називається будь-яка сукупність відомостей, первинним джерелом яких є експеримент.
Розрізняють початкову і робочу інформацію. Початкова (апріорна) інформація – це сукупність відомостей про процес керування, необхідних для побудови і функціонування системи керування. Робоча інформація – це сукупність даних про стан процесу, що використовується у процесі керування.
Робота будь-якої системи радіоавтоматики відбувається в умовах дії різних перешкод. Перешкоди вносять у процес керування дії, що дезінформують.
Керуванням називається будь-яка дія, заснована на використанні інформації, яка вносить бажані зміни у процес, що підлягає керуванню.
Регулювання – це окремий випадок керування, при якому бажаний стан об'єкта керування забезпечується шляхом стабілізації однієї чи декількох фізичних величин згідно з заданими значеннями.
Більшість сучасних систем радіоавтоматики будується на основі використання принципу регулювання по відхиленню. Він передбачає негативний зворотний зв'язок виходу системи з її входом. У результаті цього система виходить замкнутою. На схемі (рис. 1) на елемент порівняння (ЕП) через задавач (3) надходить вхідна керуюча дія х(t). Від давача (Д) надходить сигнал зворотного зв'язку у(f). Призначення задавач (3) і давач (Д) – перетворення сигналів х(t) і у(t) у форму електричної напруги. У деяких системах радіоавтоматики елементи (3) і (Д) можуть бути відсутні.
На виході елемента порівняння (ЕП) утвориться сигнал помилки z(t), що підсилюється в підсилювачі (П). Вихідний сигнал підсилювача (П) впливає на виконавчий елемент (ВЕ), що у свою чергу впливає на об'єкт керування (ОК) так, щоб увесь час зводити сигнал помилки до мінімуму.
Крім вхідного керуючого впливу х(t), на систему радіоавтоматики діють різні збурювання Z1
(t), Z2
(t), ..., Zn
(t).

Рисунок 1 – Схема системи, що працює на основі регулювання по відхиленню
Крім зазначених елементів, у систему радіоавтоматики можуть входити коригувальні елементи (КЕ), необхідні для додання системі необхідних якісних показників при належному запасі стійкості.
Система є стійкою, якщо виведена зі стану рівноваги яким-небудь збурюванням, вона повертається у вихідний стан після усунення цього збурювання.
Поряд із принципом регулювання по відхиленню, у ряді випадків у системах радіоавтоматики застосовується принцип регулювання по збурюванню, сутність якого зводиться до компенсації збурювання. Цей принцип реалізується у розімкнених системах. Перевагою принципу регулювання по збурюванню є простота реалізації. Недолік цього принципу – відсутність контролю за вихідною величиною у(t), що виключає її вплив на об'єкт керування (регулювання).
У ряді випадків застосовують комбіновані системи радіоавтоматики, що об’єднують обидва принципи регулювання.
2. Класифікація систем радіоавтоматики
У зв'язку з великою різноманітністю систем радіоавтоматики їх класифікують за рядом ознак: принцип регулювання, вид сигналу помилки, вид статичних характеристик і т.ін.
За принципом регулювання системи радіоавтоматики (РА) розділяють на замкнуті системи, у яких реалізується принцип регулювання по відхиленню, і розімкнуті системи, у яких реалізується принцип регулювання по збурюванню.
За видом сигналу помилки системи РА розділяють на безперервні, у яких сигнал помилки є безперервна функція часу, що обумовлено аналоговою формою вхідного впливу х(t), і дискретні, у яких сигнал помилки має переривчастий характер у часі, що обумовлено природною чи штучною дискретизацією вхідного впливу у часі.
За видом статичних характеристик системи РА розділяють на лінійні, у яких залежність вихідного процесу від вхідного впливу є лінійною, і нелінійні, у яких ця залежність описується нелінійною функцією через те, що один чи кілька ланок системи мають нелінійну статичну характеристику.
За характером початкової інформації системи РА розділяють на звичайні ( з повною початковою інформацією) і кібернетичні (з неповною початковою інформацією). У свою чергу звичайні системи розділяють у залежності від типу вхідного впливу на стабілізуючі системи, у яких вхідний вплив є постійною величиною:
- системи програмного регулювання, у яких вхідний вплив змінюється за заданою програмою;
- слідкувальні системи, у яких вхідна дія змінюється довільно.
Кібернетичні системи РА розділяють:
- на адаптивні, у яких структура і спосіб функціонування змінюються цілеспрямовано з метою забезпечення оптимального функціонування об'єкта;
- ігрові, у яких процес керування розглядається як гра двох і більше сторін.
3. Типові системи радіоавтоматики
На практиці найчастіше використовуються такі типи систем РА: системи автоматичного визначення напрямку на джерело радіохвиль (системи АСН), системи автоматичного спостереження за частотою і фазою радіосигналу (системи АПЧ і ФАП), системи автоматичного спостереження за часовим положенням одного або кількох радіо- і відеоімпульсів (системи АСД), системи автоматичного регулювання підсилення (системи АРП).
Системи АСН поширені у радіолокації, радіонавігації, радіокеруванні. Вони призначені для виміру кутових координат об'єктів, що рухаються, і спостереження за їх просторовим положенням.
Системи АПЧ застосовуються у радіоприймальних пристроях з метою підтримки постійної проміжної частоти сигналу і як демодулятори частотно-модульованих коливань. Також системи АПЧ використовуються для стабілізації частоти коливань, що генеруються і як вузькосмугові фільтри, які перебудовуються по частоті. Системи ФАП використовуються для тих самих цілей, що й АПЧ, але відрізняються тим, що забезпечують підстроювання не тільки по частоті, але й по фазі коливань, тобто є чутливішими і точнішими системами.
Системи АСД широко застосовуються у радіолокації і радіонавігації для виміру дальності до обраної цілі і спостереження за її радіальними переміщеннями у просторі. Також ці системи здійснюють просторово-часову селекції декількох об'єктів.
Системи АРП застосовуються у радіоприймальних пристроях різних видів для стабілізації рівня сигналу на виході підсилювачів при великому динамічному діапазоні вхідного сигналу.
4. Математичний опис автоматичних систем
Будь-яка система радіоавтоматики (РА) складається з ряду елементів (ланок). Для кожного елемента характерний зв'язок між його входом і виходом. Він виражається диференціальним рівнянням. Система РА описується системою диференціальних рівнянь.
4.1 Складання диференціального рівняння елемента автоматичної системи
Конкретний вид диференціального рівняння залежить від фізичної природи і властивостей елемента.
Розглянемо як приклад інерційну RC- ланку (рис. 2):
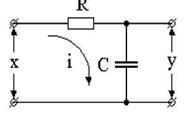
Рисунок 2 – Схема інерційної ланки
Якщо визначити х та y як відповідно вхідну і вихідну напруги цієї ланки, то згідно з теорією електричних кіл можна записати таке рівняння:

З урахуванням того, що

отримаємо таке рівняння:

Позначимо RC=T, тоді можна записати:

Уведемо до розгляду символ диференціювання за часом

Цей штучний (але по суті вірний) прийом дозволяє переписати отримане диференційне рівняння у формі:

Винесемо вихідну напругу y за дужки і остаточно отримаємо:
 . .
Відзначимо, що вираз

називається операторним коефіцієнтом передачі інерційної (у даному випадку) ланки.
4.2 Статичні і динамічні властивості елементів
Після подачі на вхід елемента деякого впливу на його виході виникає перехідний процес, по закінченні якого настає стаціонарний стан.
Статична характеристика - це залежність, що зв'язує між собою стаціонарні вхідну і вихідну величини.
Прикладом статичної характеристики може служити залежність між напругою на виході частотного дискримінатора і відхиленням частоти сигналу від його номінального значення (рис.3).
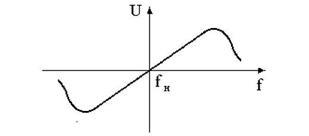
Рисунок 3 – Статична характеристика дискримінатора
Динамічна характеристика - це залежність, що зв'язує між собою зміни вхідної і вихідної величин у перехідному режимі.
4.3 Перетворення Лапласа
Перетворення Лапласа має дві взаємозалежні форми – пряму і зворотну.
Пряме перетворення описується так:
 , ,
де x(t) – оригінал функції, тобто функційна залежність у часовому вимірі;
x(p) –зображення функції x(t) за Лапласом, тобто у вимірі комплексної змінної
 . .
Зворотне перетворення вводиться у розгляд так:
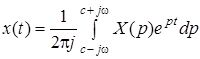 , ,
що дозволяє відшукати оригінал функції x(t) по її зображенню X(p).
Існують такі методи відшукання оригіналу x(t): табличний та метод інтегрування у комплексній площині.
Глибинний сенс перетворення Лапласа полягає у тому, що за його допомогою стає можливим здійснити перехід від вихідних диференційних рівнянь, що описують систему РА у просторі комплексної змінної р  . .
На рис. 4 наведено загальну структурну схему ланки системи РА, яка описується коефіцієнтом передачі R(p). На цьому рисунку G(p) та x(p) – відповідно сигнали у операторній формі на вході і виході ланки.

Рисунок 4 – Загальна структурна схема ланки системи РА з коефіцієнтом передачі R(p) у операторній формі.
Наприклад, якщо ланка є диференціатором, то R(p)=p.
Тоді  Якщо ланка є інтегратором, то Якщо ланка є інтегратором, то 
Тоді 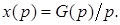
4.4 Перетворення Фур'є
Якщо в перетворенні Лапласа замінити оператор р на змінну jw отримаємо перетворення Фур'є, яке також поділяється на пряме та зворотне.
Для прямого перетворення Фур'є маємо вираз
 , ,
де x(jω) – спектральна функція дії x(t).
Зворотне перетворення Фур'є має вид:
 . .
4.5 Передатна функція
Передатною функцією N(s) елемента (системи) РА називається відношення зображення вихідної величини елемента (системи) Y(s) до зображення ) вхідної величини X(s) при нульових початкових умовах

Формально передатну функцію отримуємо з диференціального рівняння елемента (системи) РА у символічній формі шляхом заміни в ньому символу р на комплексну змінну s і розділення утвореного в такий спосіб багаточлена правої частини рівняння на многочлен лівої частини.
Наприклад, якщо диференціальне рівняння інерційного RC- елемента має вигляд.
 ; ;
звідки
 . .
Тоді

Тепер при виконанні заміни оператора p на комплексну змінну Sотримаємо:

У цьому виразі комплексні величини x(s) іY(s) є зображенням за Лапласом часових величин x(t) і y(t).
4.6 Перехід від передатної функції до частотної характеристики
У загальному виді передатна функція записується так:
 , ,
де Q(s) - багаточлен у чисельнику, P(s) – багаточлен у знаменнику, к – постійний множник.
Замінимо комплексну перемінну s на комплексну частоту jw - одержимо амплітудно-фазо-частотну характеристику елемента (системи):
 . .
Наприклад, передатна функція послідовного з'єднання безінерційного підсилювача з коефіцієнтом підсилення к-го інерційного RС- ланцюга має вигляд
 . .
Замінимо s на jw:


це модуль комплексного виразу, або ж, амплітудо-частотна характеристика даного елемента;

- це аргумент комплексного виразу, або ж, фазочастотна характеристика елемента.
Запишемо W(jw) в алгебраїчній формі:
 . .
Тут U(w) – реальна частотна характеристика. V(w) - уявна частотна характеристика.
У випадку замкнутої системи РА передатна функція позначається через Ф(s),а амплітудно-фазо-частотна характеристика – через
 , ,
де P(w) і Q(w) – відповідно реальна і уявна частотні характеристики замкнутої системи.
4.7 Логарифмічні частотні характеристики
У реальних автоматичних системах модуль частотної характеристики змінюється в дуже широких межах при зміні частоти. Тому графічне зображення їх у звичайному масштабі неможливо. У цих випадках зручно скористатися логарифмічними частотними характеристиками: амплітудною і фазовою.
Логарифмічна амплітудно-частотна характеристика визначається співвідношенням
 , ,
де L(w) – у децибелах, а частота w відкладається в декадах чи октавах. Логарифмічна фазо-частотна характеристика f(w) відображається в градусах, а частота – у декадах чи в октавах (рис.5).
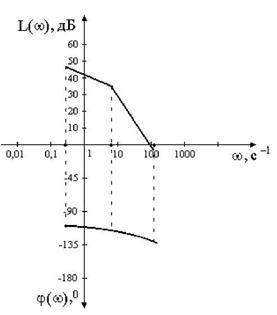
Рисунок 5 – Логарифмічні амплітудно-фазо-частотні характеристики
|