БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ ИРАДИОЭЛЕКТРОНИКИ
Кафедра электронной техники и технологий
РЕФЕРАТ
на тему:
«Прецизионные координатные системы с линейными шаговыми двигателями»
Минск, 2008
В разомкнутых системах цифрового программного управления с точным позиционированием, а также при реализации сложных двигателей по двум координатам целесообразно применение линейных шаговых двигателей (ЛШД), допускающих изменение в широких пределах числа фаз, частоты и форм напряжения на фазах.
Разработано несколько конструкций координатных столов с ЛШД и электронными блоками управления. Предназначены они для установки в различном технологическом оборудовании производства ИЭТ, металлообрабатывающих станков с ЧПУ, медицинском оборудовании и т.д. Принципиально ЛШД представляет собой шаговый двигатель с развернутыми подвижными и неподвижными частями. Конструкция одного из вариантов ЛШД приведена на рисунке 1.
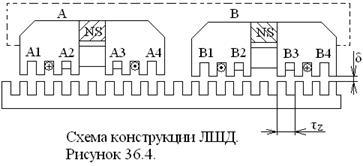
Рисунок 1.
Двигатель содержит якорь состоящий из двух жестко соединенных электромагнитных модулей А и В и безобмоточного зубчатого пассивного статора, выполненного из магнитомягкого материала.
Каждый из модулей А и В состоит из двух П-образных магнитопроводов объединенных постоянным магнитом.
Обмотки управления охватывают средние полюсы А2, А3 и соответственно В2 и В3 модулей А и В.
Электромагнитные модули расположены со взаимным линейным сдвигом, равным  , где k=0,1,2… целое число, значения которого выбирается из конструктивных соображений. , где k=0,1,2… целое число, значения которого выбирается из конструктивных соображений.
Между первичным и вторичным элементами ЛШД имеется зазор δ.
Движение вторичного элемента (якоря) с шагом  осуществляется разнополярной коммутацией обмоток модулей А и В. Порядок коммутации определяет направление движения. осуществляется разнополярной коммутацией обмоток модулей А и В. Порядок коммутации определяет направление движения.
ЛШД обеспечивает перемещение координатного стола в плоскости конструктивно объединяющей по меньшей мере три ЛШД: один на одной координатной оси, два на другой.
Необходимый рабочий зазор δ между статором и якорем чаще всего обеспечивается применением аэростатических опор.
Схематически одна из конструкций такого координатного стола показана на рисунке 1а. Подвижная каретка 1, имеющая в качестве основания парумодулей ЛШД2, предназначенных для движения по оси Х (Х-ЛШД), и две пары модулей 3 (Y-ЛШД), скользит по статору 4 на воздушной подушке. Подушка образуется струей сжатого воздуха подаваемого в которые расположены по периметру ЛШД.
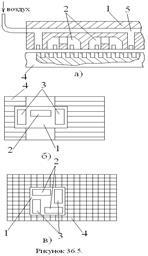
Рисунок 1 а - Координатные столы с ЛШД:
а) конструктивная схема.
б) координатный стол с разделенной нарезкой статора.
в) координатный стол с совмещенной нарезкой статора.
В варианте с разделенной нарезкой статора по координатным осям (рисунок 1б) Х-ЛШД позиция 2 обеспечивает перемещение каретки в пределах средней зоны зубцов статора. Y-ЛШД позиция 3 перемещает каретку поперек нарезки статора в крайних зонах. В варианте с совмещенной по обеим осям нарезкой зубцов статора (рисунок 1в) каретка содержит по паре Х-ЛШД-2 и Y-ЛШД позиция 3. Диапазон перемещений по осям в этом случае ограничен лишь размерами статора. При движении по оси Х коммутируются обмотки электромагнитов модулей Х-ЛШД при статическом состоянии токов в обмотках Y-ЛШД. При коммутации обмоток Y-ЛШД обеспечивается движение по координате Н.
При одновременном перемещении по двум координатам управляют токами фаз обеих групп ЛШД.
Зубчатые поверхности статора и якорей приготавливаются фрезерованием прецизионной групповой фрезой или химическим травлением по прецизионным фотошаблонам с последующей заливкой пазов эпоксидными компаундами с твердым немагнитным наполнителем. После этого поверхности шлифуют и притирают. Это обеспечивает высокую степень параллельности и чистоту рабочих поверхностей.
Электромагнитное взаимодействие якоря со статором происходит в воздушном слое между кареткой и статором, поэтому постоянство зазора δ сказывается на стабильности тяговых точностных характеристик координатной системы. Сама же величина зазора получается как результат уравновешивания аэростатической силы отталкивания Fa
магнитной силой притяжения FM
.
Таким образом для обеспечения стабильности величины зазора δ, должно быть обеспечено условие “всплывания” каретки над плоскостью статора т.е. δ>0, Fа
>FM
. Типичный характер зависимостей FM
(δ) и Fa
(δ) из образцов координатной системы для технологических установок микроэлектроники с ЛШД показан на рисунке 2.
Взаимодействие сил притяжения FM
и аэростатических сил Fa
.
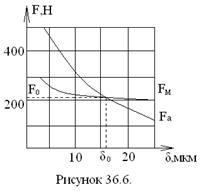
Рисунок 2 - Взаимодействие сил притяжения FM
и аэростатических сил Fa
.
Величина зазора фиксируется на уровне δ0
при F0
. Тогда равновесие удовлетворяет условию статического равновесия
 . (1) . (1)
В серийно-выпускаемых двухкоординатных системах сЛШД обеспечивается зазор δ=10-20мкм при давлении воздуха 2-6 атм и расходе 5-6 л/мин.
Статические и динамические свойства ЛШД определяются прежде всего характеристикой тягового усилия и способности управлять ЛШД.
При анализе тягового усилия необходимо иметь в виду, что зубцовые зоны статора и якоря обычно выполняются так, что ширина зубца и паза одинаковы и равны  , что при отношении воздушного зазора к зубцовому делению , что при отношении воздушного зазора к зубцовому делению  дает практически синусоидальную зависимость магнитного сопротивления зазора от перемещения якоря х с постоянной составляющей R0
и амплитудой переменной составляющей R1
. дает практически синусоидальную зависимость магнитного сопротивления зазора от перемещения якоря х с постоянной составляющей R0
и амплитудой переменной составляющей R1
.
 . (2) . (2)
Перемещение удобно измерять в единицах зубцового деления обозначив
 . (3) . (3)
При допущении о линейности магнитной цепи и синусоидальности магнитных сопротивлений рабочих зазоров под полюсами
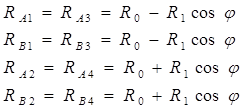 . (4) . (4)
где R0
и R1
– соответственно постоянная составляющая и амплитуда переменной составляющей магнитного сопротивления.
Тяговое усилие всего ЛШД определяется как
 , (5) , (5)
где  , (6) , (6)
тяговое усилие модулей А,
 (7) (7)
тяговое усилие модулей В,
Rm
– внутреннее магнитное сопротивление постоянных магнитов,
FA
и FB
– соответственно М.Д.С. обмоток управления модулями А и В.
Fm
– М.Д.С. постоянных магнитов.
Тяговое усилие ЛШД обратно пропорционально постоянной составляющей магнитного сопротивления воздушного зазора под полюсами электромагнитных модулей.
Уменьшить зазор меньше 10-15 мкм затруднительно по технологическим соображениям. С другой стороны тяговое усилие пропорционально глубине модуляции магнитного сопротивления зубчатой структурой полюсов, т.е. отношению  . Отношение резко возрастает при уменьшении τz
, типичная зависимость показана на рисунке 3. . Отношение резко возрастает при уменьшении τz
, типичная зависимость показана на рисунке 3.
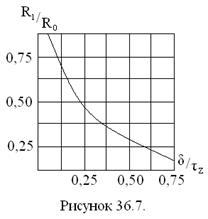
Рисунок 3. Модуляция зубчатой структурой магнитного сопротивления воздушного зазора.
Это обстоятельство наряду с технологическими сложностями изготовления зубчатых структур с малым зубцовым делением обусловлено тем фактом, что ЛШД изготавливается с τz
=0,2-1мм при воздушном зазоре δ=10-20мкм.
При четырехкратной дискретной разнополярной коммутации обмоток модулей А и В, якорь перемещается с шагом равным τz
/4, что в линейных размерах соответствует 0,05-0,25 мм. Для большинства прецизионных координатных систем такая дискретность недостаточна.
Снижение величины единичного шага добивается способами управления, использующими электрическое дробление основного шага ЛШД.
Если формировать МДС обмоток модулей по синусоидальному закону  ; ;  , то зависимость тягового синхронизирующего усилия представляется в виде: , то зависимость тягового синхронизирующего усилия представляется в виде:
 . (8) . (8)
Характеристика синхронизирующего усилия имеет синусоидальную форму и в отсутствии внешней силы сопротивления по координате Х якорь ЛШД фиксируется в позиции установленной управляющими фазами токов  . .
Таким образом на протяжении зубцового деления можно иметь в пределе любое число статически устойчивых положений якоря, задаваемых текущим значением аргумента управляющих синус-косинусных токов фаз.
Обычно управляющие токи фаз ЛШД формируются с использованием цифровой техники при конечном сочетании уровней токов в фазах, что обеспечивает ряд дискретных позиций якоря в пределах зубцового деления. Синус-косинусные функции токов фаз получаются квантованными во времени.
Особенностью ЛШД на аэростатических опорах является отсутствие внешнего демпфирования нагрузки. Поэтому возникает проблема с остановом двигателя в заданной позиции.
Для ее решения устанавливается еще пара блоков работающих с противоположным тяговым усилием.
Современные координатные столы для МЭ могут быть охарактеризованы следующими параметрами:
· При дискретности перемещения 10 мкм максимальная скорость перемещения достигает 500 мм/с при максимальном ускорении до 40 м/с2
. При дискретности перемещения 1 мкм максимальная скорость достигает 150 мм/c при наибольшем ускорении до 20 м/с2
.
Преимущества:
1. Отсутствие механических контактов.
2. Высокие точности позиционирования.
3. Высокое быстродействие.
4. Простота управления.
5. Отсутствие механических направляющих.
Недостатки:
1. Затруднительная унификация.
2. На воздушной подушке нельзя в вакуум.
3. Трудности с торможением.
ЛИТЕРАТУРА
| 1.Орлов П.И. Основы конструирования. Справочно-методическое пособие. В 2-х кн. Кн.1. /Под ред. П.Н.Учаева. — 3-е изд. испр. — М.: Машиностроение |
| 2.Конструирование приборов: В 2-х кн. /Под ред. В.Краузе; Пер. с нем. В.Н.Пальянова; Под ред. О.Ф.Тищенко. —Кн.1. М.: Машиностроение |
| 3. Конструирование приборов: В 2-х кн. /Под ред. В.Краузе; Пер. с нем. В.Н.Пальянова; Под ред. О.Ф.Тищенко. — Кн.2. М.: Машиностроение |
| 4.Попов В.Ф., Горин Ю.Н. Процессы и установки электронно-ионной технологии:Учеб. пособие для вузов.— М.: Высш. шк., |
|