Контрольная работа по теме:
Принцип построения высокочастотной части антенно-волноводной системы, с поворотом вектора поляризации
РАДИОЛОКАЦИОННАЯ СТАНЦИЯ 9
S
35М1
Антенно-волноводная система
НАЗНАЧЕНИЕ.
АВС предназначена:
- для формирования ДН (диаграммы направленности) на прием и передачу;
- для перемещения ДН в пространстве;
- для канализации (передачи) электромагнитной энергии от передатчика к антенне и от антенны к приемнику.
СОСТАВ.
Антенно-волноводная система имеет:
- высокочастотную часть;
- электромеханическую часть.
ВЫСОКОЧАСТОТНАЯ ЧАСТЬ ИМЕЕТ:
- параболическое решетчатое зеркало - АН-2;
- рефлектор с поляризационными решетками - АН4;
- рупорный облучатель канала "Обзор" и канала "Подсвет" - АН3;
- волноводный тракт;
- приемный тракт;
- вибраторные облучатели канала НРЗ;
- компенсационные антенны;
- компенсационные антенны НРЗ.
ЭЛЕКТРОМЕХАНИЧЕСАЯ ЧАСТЬ ИМЕЕТ:
- силовой редуктор азимута;
- силовой редуктор угла места;
- приборный редуктор азимута;
- приборный редуктор угла места;
- координатор;
- прибор питания;
- прибор управления ферритовым коммутатором.
ОСНОВНЫЕ ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ.
1. Ширина ДН канала "ОБЗОРА"
- по азимуту -1,15º;
- по углу места - 2,8º.
2. Ширина ДН канала " ПОДСВЕТА"
- по азимуту - 1,4º;
- по углу места - 2,9º.
3. Коэффициент усиления
- на передачу канала " ОБЗОРА" - 6000
- на прием канала " ОБЗОРА" - 4000
-РСН - 2000
- на передачу канала " ПОДСВЕТА" - 4300.
4. Перемещение луча в пространстве
- по азимуту - ±60º
- по углу места - -10º +80º
5. Скорость перемещения луча по азимуту
- в широкой зоне - 200º/сек
- в узкой зоне - 60º/сек.
6.Время реверса луча по азимуту - 0,15 сек.
РАБОТА ВЫСОКОЧАСТОТНОЙ ЧАСТИ
Волноводная система выполняет следующие функции:
- одновременную канализацию электромагнитной энергии по каналам "О" и "П" с выхода РПДУ на вход суммарного канала облучателя;
- передачу электромагнитной энергии от облучателя на вход I, II приемника (бл. Р-7М1) в режиме ОБЗОР;
- амплитудную суммарно-разностную обработку сигналов с трех выходов облучателя, обеспечивающую пеленгацию цели методом скрытого сканирования (режим СОПРОВОЖДЕНИЕ);
- работу на эквивалент ЭКВ по каналам ОБЗОР и ПОДСВЕТ.
Передающие каналы волноводной системы герметичны и работают при избыточном давлении воздуха Р=1,5 атм., необходимом для обеспечения электропрочности АВС. Повышенное давление обеспечивает пневмосистема (бл. Р-56).
Элементы волноводной системы, работающие при высоком уровне мощности, включены в СЖО, обеспечивающую необходимый тепловой ре жим работы блока.
РАБОТА НА ПЕРЕДАЧУ В РЕЖИМЕ ОБЗОР
Электромагнитная энергия с выхода РПДУ (блок Р-2КИ) поступает через секцию контрольную (У6) поступает на вход 2 циркулятора Э22 и через выход 1 поступает на электромеханический коммутатор КР-3 (У4) тракта волноводного (Рис. 1).
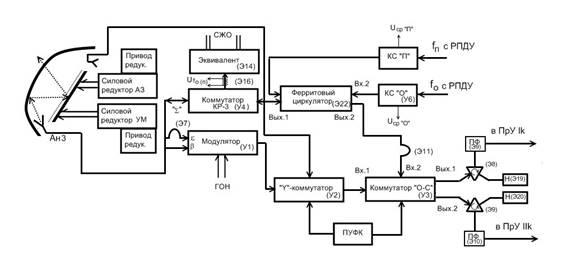
Рис. 1 - Структурная схема АВС
Коммутатор КР-3 обеспечивает переключение режимов АНТЕННА-ЭКВИВАЛЕНТ управляющим напряжением +27В с блока Р-19М1.
В режиме ЭКВИВАЛЕНТ вся энергия поступает через волновод Э16 на вход нагрузки Э14 (ЭКВИВАЛЕНТ), где преобразуется в рабочем теле в тепловую энергию, которая рассеивается СЖО.
Контрольная секция У6 содержит термодатчик, в котором под действием электромагнитной энергии возникает термо-ЭДС, величина которого зависит от средней мощности поля. По величине тока, измеренного прибором, в блок Р-36 поступает значение средней мощности передатчика "О", индицируемой на стрелочном приборе блока.
Одновременно с волновода Э16 выводится на ПКР электромагнитный сигнал для контроля выходных параметров передатчика.
В режиме "АНТЕННА" энергия поступает через коммутатор У4 на вход суммарного канала "Σ" облучателя.
В раскрыве облучателя (Ан3) при этом возбуждается волна с горизонтальной поляризацией. Горизонтально - поляризованная сферическая волна, возбужденная облучателем, находящимся в фокусе параболического зеркала, преобразуется системой зеркал (параболическое зеркало - плоский рефлектор) в вертикально–поляризованную плоскую волну, которая излучается в пространство.
Горизонтально-поляризованная волна, излученная рупором облучателя, попадает на внутреннюю поверхность параболического зеркала.
Структура зеркала такова, что такая (горизонтально поляризованная) волна не проходит через зеркало, а отражается обратно и попадает на рефлектор с поляризационной решеткой.
Горизонтально поляризованная волна Ег
, попадая на поляризационную решетку, раскладывается на параллельную Е1
и перпендикулярную Е2
составляющую (Рис. 2,а).
Составляющая Е1
, отражаясь от поляризационной решетки, взаимодействует с перпендикулярной составляющей Е’2
предыдущего полупериода. Тем самым формируя вертикально поляризованную волну Ев
.
Для перпендикулярной составляющей Е2
, поляризационная решетка является радиопрозрачной и составляющая Е2
без потерь проходит расстояние между поляризационной решеткой и рефлектором, равное четверти длины волны, что по времени соответствует четверти периода (т.е. на П/4).
За это время, волна Е2
успевает осуществить доворот своей фазы на 90 град. Отражаясь от не прозрачного рефлектора, волна Е2
меняет свой знак на противоположный, что соответствует сдвигу фазы еще на 180 град (т.е. на П/2), и проходя расстояние, равное четверти длины волны, между рефлектором и поляризационной решеткой, обеспечивает доворот своей фазы еще на 90 град и попадает на решетку как волна Е’2
с общим набегом фазы 360 град.
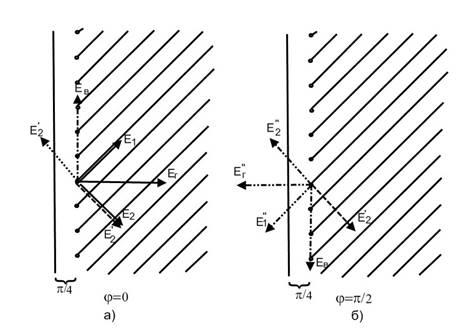
Рис. 2 - Изменение вектора поляризации
Общее время, затраченное на прохождение волной Е2
от поляризационной решетки до рефлектора и обратно, составляет половину периода (П/4+П/4 = П/2). Но за это время, горизонтально поляризованная волна Ег
изменит свою фазу на 180 град ( Е"г
) (Рис.2,б).
Такая волна Е"г
, также раскладывается на две составляющие параллельную Е"1
и перпендикулярную Е"2
. При чем составляющая Е"2
проходит через поляризационную решетку и попадает на рефлектор.
А составляющая Е"1
взаимодействует с составляющей Е’2
предыдущего полупериода. В результате такого взаимодействия формируется вертикально-поляризованная волна Е"г
, которая отражается от решетки и проходит через параболическое решетчатое зеркало, которое для такой волны является радиопрозрачным и излучается в пространство.
Формируется узконаправленная однолепестковая (игольчатого типа) диаграмма направленности.
В режиме ОБЗОР, на прием, по суммарному "Σ" каналу формируется аналогичная ДН как и на передачу. Принятая по "Σ" каналу электромагнитная энергия проходит через электромеханический коммутатор У4 на выход 1 ферритового циркулятора Э22 (циркулятор прием-передача) и с выхода 2 поступает через секцию фазирования на вх.2 ферритового коммутатора У3 (О-С обзор-сопровождение). По принципу действия ферритовый коммутатор У3 аналогичен 4-х плечевому ферритовому циркулятору Э22 и отличается тем, что постоянный магнит заменен электромагнитом.
Управляя магнитным полем, можно обеспечить следующие режимы работы:
1) Коммутировать энергию ЭМ поля (в зависимости от полярности управляющего напряжения) со входа 2 (У3) только на выход 1, либо только на выход 2 (т.е. в режиме ОБЗОР подключать тот или другой каналы приемника). При этом ЭМЭ на вход 1 коммутатора У3 не поступает, т.к. коммутатор У2 находится под напряжением с пульта управления ферритовым коммутатором (ПУФК) и обеспечивает запирание сигнала на 20 дБ;
2) Поровну распределять энергию входных каналов (У3) (входы 1,2) между выходными каналами (выходы 1,2), при этом ферриты полностью размагничиваются, снимается напряжение с Y- коммутатора (У2) при этом затухание коммутатора становится равным 0,5 дБ - режим СОПРОВОЖДЕНИЕ.
В режиме ОБЗОР ЭМЭ с входа 2 коммутатора У3 поступает на выход 1(2) и проходя через Y- циркулятор Э8 (Э9) и фильтр Э9 (Э10) подается на вход 1(2) приемника бл. Р-7М1. Циркуляторы Э9, Э10 обеспечивают защиту АВС от сигнала, отраженного от входных цепей бл. Р-7М1. Отраженная от бл.Р-7М1 энергия поглощается в нагрузках Э19 и Э20, подключенных к соответствующим Y- циркуляторам.
Фильтры Э9 и Э10 служат для защиты приемника от сигнала частоты подсвета.
Работа в режиме СОПРОВОЖДЕНИЕ
В режиме СОПРОВОЖДЕНИЕ формирование РСН осуществляется методом сканирования - смещения максимума приемной ДНА относительно направления излучения, определяемого положением рефлектора, а так же суммированием однолепестковой суммарной и 2-х лепестковых разностных ДН, формируемых на выходах 3-х канального облучателя. Суммирование осуществляется в коммутаторе «О-С» (У3) при переводе его в режим СОПРОВОЖДЕНИЕ (ферриты полностью размагничены).
Отраженная от цели волна, вертикальной поляризации, проходя параболическое зеркало, падает на рефлектор, отражается с поворотом вектора поляризации на 90 град., и направляется на параболическое зеркало, отражается от него и фокусируется на облучателе, формируя на его выходах следующие ДН:
- на выходе Σ (суммарного) канала -однолепестковая ДН -Σ
- на выходе I ( азимутальный) канал -двухлепестковая ДН - β
- на выходе II(угломестный) канал -двухлепестковая ДН - ε
Энергия, принятая по суммарному каналу, через коммутатор КР-3 поступает на циркулятор Э22, а затем на секцию фазирования (Э11) и далее на вход 2 коммутатора «О-С» (У3). Секция фазирования представляет собой механический фазовращатель тромбонного типа.
Энергия с выхода каждого разностного канала ( ε, β) поступает на выходы 1,2 электромеханического балансного модулятора (У1), причем энергия УМ разностного канала поступает на вход модулятора через секцию фазирования (Э7).
Модулятор состоит из вращающейся диэлектрической пластины, длиной равной половине длины волны, и двух поляризационных волноводных мостов, имеющих ортогональные входы.
Принцип действия модулятора заключается в том, что разностные сигналы модулируются по амплитуде за счет вращения пластины, один по закону cos2ω (t), другой по закону sin2 ω(t), где ω- круговая частота вращения диэлектрической пластины.
Напряженность электрического поля сигнала с выхода модулятора будет равна:
Емвых
=С( Еε
sin 2 ω(t) + Еβ
cos 2 ω(t))+(( Fo
±F∂
) t+π/2),
где π/2-сдвиг фаз между суммарным сигналом ЕΣ
и выходным сигналом модулятора Емвых
на входах коммутатора У3;
К- постоянный множитель, R - расстояние от цели до РЛС;
ω(t)=α - угол поворота ротора модулятора;
Еε
, Еβ
- нормированные сигналы, принимаемые по соответствующим разностным каналам;
Fo
- несущая частота передатчика;
F∂
- частота Доплера.
Сигнал с выхода модулятора через открытый коммутатор У2 и волновод поступает на вход 1 коммутатора У3.
На вход 2 поступает суммарный сигнал:
ЕΣ
=C* Σ*sin[(Fo
±F∂
) t]
Σ - нормированная суммарная ДН.
Коммутатор У3 в режиме СОПРОВОЖДЕНИЕ работает как щелевой мост (ферриты размагничены) и напряженность электрического поля сигналов на выходах коммутатора (выход 1,2):
выход 1
Е1
=C* Σ [1+ sin2 ω(t)+ cos2 ω(t)] *sin [(Fo
±F∂
) t + π/2]
выход 2
Е2
= C* Σ [1sin2 ω(t) - cos2 ω(t)] *sin [(Fo
±F∂
) t + π/2]
К1
,К2
-крутизна пеленгационной характеристики
ε, β - углы отклонения цели от РСН
Таким образом, в выходных сигналах коммутатора У3 содержится информация о направлениях отклонения цели от РСН. Сигналы с выходов коммутатора У3 через Y- циркуляторы Э8,Э9, фильтры Э9,Э10 поступают на два входа приемника.
Прибор управления ФК (ПУФК) служит для включения и выключения ферритового коммутатора У3,обеспечивающего формирование соответствующих диаграмм направленности. Схема построена на реле и имеет RC цепочку, на которой формируется импульс обратной полярности для снятия остаточного напряжения с ферритов коммутатора в режиме сопровождения.
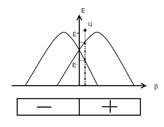
Рис. 3 - ДН азимутального канала

Рис. 4 - Сигнал цели снимаемый азимутальной положительной ДН

Рис. 5 - Сигнал снимаемый азимутальной отрицательной ДН
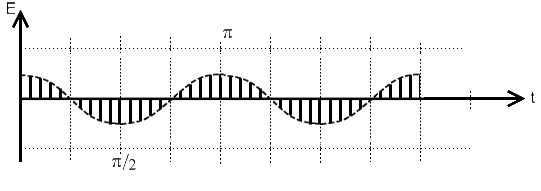
Рис. 6 - Сигнал снимаемый азимутальной разностной ДН
Рис. 7 - Сигнал снимаемый суммарной ДН

Рис. 8 - Сигнал снимаемый суммарно-разностной, азимутальной ДН
Как видно из графика, суммарно-разностной ДН (Рис. 8.), амплитуда огибающей указывает на величину отклонения цели от РСН, а фаза указывает на направление отклонения.
Эта информация содержится в обоих каналах, но в противофазе, поэтому для надежного сопровождения, достаточно иметь один исправный канал. Но для надежной защиты от уводящих помех по угловым координатам необходимо наличие двух исправных каналов.
РАБОТА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ЧАСТИ
Управление лучом диаграммы направленности осуществляется перемещением рефлектора по азимуту и углу места силовыми редукторами на порошковых муфтах.
Для перемещения рефлектора вручную в силовых редукторах азимута и угла места имеются ручные приводы. Как по азимуту так и по углу места перемещение рефлектора ограничивается концевыми выключателями и пружинными упорами.
Силовые редуктора по АЗ и УМ представляют собой независимые, взаимозаменяемые электромеханические устройства, выполненные на порошковых муфтах (рис. 9).

Рис. 9 - Силовой редуктор
Принцип действия порошковых муфт основан на эффекте сцепления, которое возникает между поверхностями, разделенными зазором, содержащим ферромагнитный порошок. Если зазор пересекается магнитным потоком, то частицы порошка, связываясь друг с другом намагниченными поверхностями, образуют сцепляющий слой, который создает фрикционный момент между ведущей и ведомой частями муфты.
При отсутствии сигнала на муфте силы сцепления отсутствуют и ведущий вал может свободно вращаться независимо от ведомого.
В силовых редукторах как по азимуту так и по углу места имеются порошковые муфты ЭМ1, ЭМ2, ведущие шестерни которых соединены между собой зубчатой передачей через паразитное колесо. Вал паразитного колеса является выходным валом следящего привода. Его скорость и направление вращения зависит от разности управляющих токов муфт и моментов, передаваемых муфтами.
|