Министерство образования РФ
Санкт-Петербургский Государственный Морской Технический Университет
Кафедра 50
Курсовая работа
Расчет и моделирование цифрового фильтра.
Выполнил: Резунов А.Б. гр. 3580
Проверил: Сетин А.И.
Санкт-Петербург 2009
Содержание
Введение
Общие сведения по КИХ-фильтрам
Расчет цифрового фильтра
Модель цифрового фильтра и описание блоков модели
Моделирование работы цифрового фильтра в MatLab
Введение
С физической точки зрения цифровая фильтрация – это выделение в определенном частотном диапазоне с помощью цифровых методов полезного сигнала на фоне мешающих помех (рис. 1).
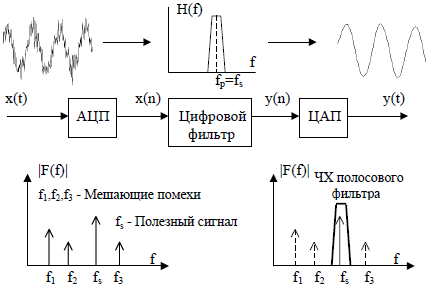
Рис. 1 Фильтрация помех с помощью цифрового ПФ.
По своим частотным свойствам фильтры делятся на:
– фильтры нижних частот (ФНЧ) – Low pass – рис.2а;
– фильтры верхних частот (ФВЧ) – High pass – рис.2б;
– полосовые фильтры (ПФ) – Band pass – рис.2в;
– режекторные фильтры (РФ) – Band stop – рис.2г.
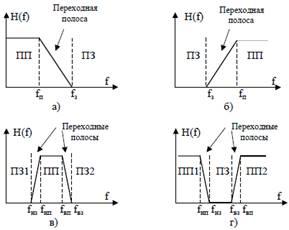
Рис. 2 Идеальные частотные характеристики фильтров.
На рис. 2 приняты следующие обозначения:
ПП – полоса пропускания – частотная область, внутри которой сигналы проходят через фильтр практически без затухания;
ПЗ – полоса задерживания – выбирается разработчиком такой, чтобы обеспечить затухание сигнала не хуже заданного;
Переходная полоса – частотная область между ПП и ПЗ (характеризуется скоростью спада, обычно выражается в дБ/декаду);
fп - частота среза полосы пропускания – точка на уровне 3дБ;
fз - частота среза полосы задерживания – определяется уровнем пульсаций ЧХ в ПЗ;
fнп , fвп – нижняя и верхняя частоты среза полосы пропускания;
fнз , fвз – нижняя и верхняя частоты среза полосы задерживания.
Частота среза в этом случае является условной границей между частотой среза полосы пропускания и частотой среза полосы задерживания.
АЧХ реальных фильтров (рис. 3, на примере ФНЧ) имеют пульсации в полосе пропускания δп и задерживания δз (нестабильность ЧХ в ПП и ПЗ). Часто в литературе они имеют другое название:
Rз – максимальное подавление в полосе задерживания, дБ;
Rп – минимальное подавление в полосе пропускания, дБ.
Пульсации ЧХ в ПП вносят определенные искажения в сигнал, поэтому они более значимы при определении параметров цифровых фильтров.

Рис. 3 Реальная АЧХ цифрового фильтра (на примере ФНЧ).
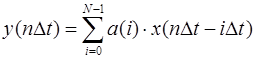
Математически работа цифрового фильтра во временной области описывается разностным уравнением:
 , (1) , (1)
где  и и  - -  - тые отсчеты входного и выходного сигналов фильтра, взятые через интервал - тые отсчеты входного и выходного сигналов фильтра, взятые через интервал   ; ;  и и  – постоянные коэффициенты цифрового фильтра. – постоянные коэффициенты цифрового фильтра.
Цифровые фильтры принято делить на два класса:
− нерекурсивные фильтры;
− рекурсивные фильтры.
Нерекурсивные фильтры называют еще фильтрами с конечной импульсной характеристикой (КИХ-фильтры), а рекурсивные фильтры - фильтрами с бесконечной импульсной характеристикой (БИХ-фильтры). В иностранной литературе их называют:
− FIR (Finite Impulse Response) – фильтр с конечной импульсной характеристикой;
− IIR (Infinite Impulse Response) – фильтр с бесконечной импульсной характеристикой.
Если в выражении (1) положить коэффициенты  , то фильтр, реализующий этот алгоритм, называется нерекурсивным. Его работа описывается уравнением: , то фильтр, реализующий этот алгоритм, называется нерекурсивным. Его работа описывается уравнением:
 , (2) , (2)
вычисляющим свертку двух последовательностей: коэффициентов и дискретных отсчетов входного сигнала .
Если хотя бы один коэффициент  , то фильтр, реализованный согласно выражения (1), называется рекурсивным. Очевидно, что БИХ-фильтр представляет собой устройство с обратной связью, а КИХ-фильтр - без обратной связи. , то фильтр, реализованный согласно выражения (1), называется рекурсивным. Очевидно, что БИХ-фильтр представляет собой устройство с обратной связью, а КИХ-фильтр - без обратной связи.
Общие сведения по КИХ-фильтрам
Нерекурсивные фильтры работают в соответствии с выражением (2). Раскроем сумму:
 (3) (3)
КИХ-фильтр производит взвешенное суммирование (с коэффициентами ) предшествующих отсчетов входного сигнала. Величину  называют порядком фильтра, называют порядком фильтра,  – шаг дискретизации. Структурная схема КИХ-фильтра представлена на рис. 4. – шаг дискретизации. Структурная схема КИХ-фильтра представлена на рис. 4.
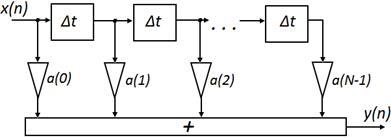
Рис. 4 Структурная схема КИХ-фильтра.
В этом фильтре дискретные выборки из сигнала  , задержанные на интервалы , задержанные на интервалы  , взвешиваются с коэффициентами и суммируются с образованием отклика , взвешиваются с коэффициентами и суммируются с образованием отклика  . Фильтр, представленный на рис. 4 называют еще трансверсальным фильтром. Основными элементами фильтра являются: . Фильтр, представленный на рис. 4 называют еще трансверсальным фильтром. Основными элементами фильтра являются:
− линия задержки с отводами;
− умножителей;
− многовходовый параллельный сумматор.
КИХ-фильтры всегда устойчивы. Форма частотной характеристики КИХ-фильтров слабо чувствительна к точности коэффициентов. Главным преимуществом КИХ-фильтра является линейность его ФЧХ.
Z - преобразование (3):
 . (4) . (4)
Тогда передаточная характеристика КИХ-фильтра:
 . (5) . (5)
Если в (2.9) произвести замену  , то ЧХ КИХ- фильтра будет иметь вид: , то ЧХ КИХ- фильтра будет иметь вид:
 . (6) . (6)
Из выражения (6) следует, что при заданном (фиксированном) шаге дискретизации можно реализовать самые разнообразные формы ЧХ цифрового фильтра, подбирая (рассчитывая) должным образом весовые коэффициенты .
Расчет цифрового фильтра
Расчет цифрового фильтра будем проводить в пакете программ MatLab с помощью инструмента FilterDesign & AnalysisTool.
После расчета цифрового фильтра в инструменте FilterDesign & AnalysisTool получились значения для порядка фильтра, графики АЧХ и ФЧХ.
Порядок фильтра  . .
Графики АЧХ в линейном и логарифмическом масштабах показаны на рис. 5 и рис 6 соответственно.
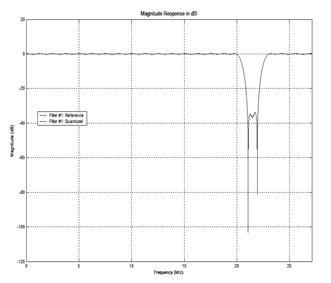
Рис. 5 График АЧХ в линейном масштабе.
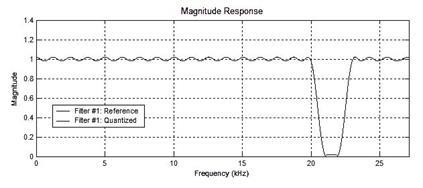
Рис. 6 График АЧХ в логарифмическом масштабе.
Графики АЧХ в логарифмическом масштабе и ФЧХ, где фаза измеряется в радианах, показаны на рис. 7.

Рис. 7 Графики АЧХ и ФЧХ.
Модель цифрового фильтра и описание блоков модели
Модель цифрового фильтра представлена на рис. 8.
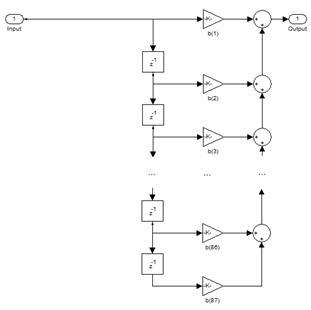
Рис. 8 Модель цифрового фильтра.
Модель цифрового фильтра состоит из:
1. 86 линий задержки  , каждая из которых задерживает сигнал со своего входа на величину равную ; , каждая из которых задерживает сигнал со своего входа на величину равную ;
2. 87 усилителей сигналов  , которые производят умножение сигналов со своих входов на определенные коэффициенты; , которые производят умножение сигналов со своих входов на определенные коэффициенты;
3. 86 сумматоров, которые суммируют выходные сигналы с усилителей;
4. входа фильтра  , на который подается фильтруемый входной сигнал; , на который подается фильтруемый входной сигнал;
5. выхода фильтра  , на который подается уже отфильтрованный входной сигнал. , на который подается уже отфильтрованный входной сигнал.
Так как усилители производят умножение сигналов на коэффициенты, то можем записать их значения, которые получились при расчете фильтра в инструменте FilterDesign & AnalysisTool:
Моделирование работы цифрового фильтра в
MatLab
Для того, чтобы проверить правильность работы модели цифрового фильтра, проводят моделирование работы фильтра с подачей на него сигналов. В нашем случае на цифровой фильтр будет подана сумма 3х сигналов, 2а из которых будут находиться вне полосы пропускания цифрового фильтра. Схема моделирования работы цифрового фильтра показана на рис. 9.

Рис. 9 Схема для моделирования работы ЦФ.
Схема состоит из:
- 3х генераторов синусоидальных колебаний с частотами и амплитудами:
Sine Wave –  и и ,Sine Wave1 – ,Sine Wave1 –  и, Sine Wave2 – и, Sine Wave2 –  и и ; ;
- сумматора 3х сигналов идущих с генераторов;
- дискретизатора Zero-OrderHold, преобразующий непрерывный сигнал, поступающий с сумматора, в дискретный, шаг дискретизации
 , при , при  ; ;
- квантователь Quantizer, преобразующий дискретный сигнал в цифровой, шаг квантования
 ; ;
- 3х осциллографов: Scope1 (показывает непрерывный сигнал с вых. сумматора), Scope2 (показывает цифровой сигнал перед фильтрацией), Scope3 (показывает цифровой сигнал после фильтрации);
- 2х спектроскопов: SpectrumScope1 (показывает спектр цифрового сигнала перед фильтрацией), SpectrumScope2 (показывает спектр цифрового сигнала после фильтрации).
Показания 3х осциллографов и 2х спектроскопов после поведения моделирования показаны на рис. 10, рис. 11, рис. 12, рис. 13 и рис. 14.

Рис. 10 Показание осциллографа Scope1.
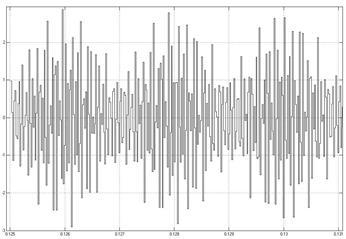
Рис. 11 Показание осциллографа Scope2.

Рис. 12 Показание осциллографа Scope3.
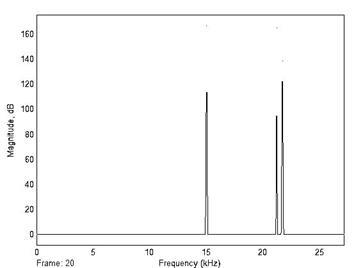
Рис. 13 Показание спектроскопа SpectrumScope1.
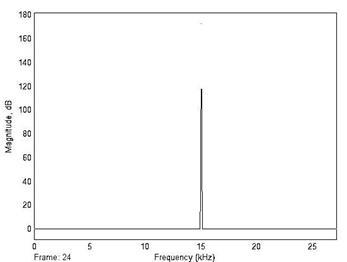
Рис. 14 Показание спектроскопа SpectrumScope2.
|