Министерство образования Российской Федерации
Чувашский государственный университет им. И.Н. Ульянова
Кафедра «Системы автоматизированного управления электроприводами»
Курсовой проект
по дисциплине
“Автоматизированный электропривод промышленных установок и технологических комплексов”
На тему: Расчет характеристик электропривода насоса Д5000-32-2 для 2-х способов регулирования производительности.
Проверил:
профессор, к.т.н.
Ларионов Владимир Николаевич
Чебоксары, 2005
Содержание
1. Введение
2. Построение характеристик насоса для скоростей, отличных от номинальной и характеристики магистрали
3. Расчет и выбор электродвигателя и асинхронно-вентильного каскада
4. Расчет и построение механических характеристик .
5. Расчет потерь скольжения, потерь в асинхронно-вентильном каскаде и потерь в роторе
6. Расчет мощности, потребляемой из сети приводом при регулировании задвижкой и с помощью асинхронно-вентильного каскада .
7. Список использованной литературы
1. Введение
Современное промышленное и сельскохозяйственное производство, транспорт, коммунальное хозяйство, сферы жизнеобеспечения и быта связанны с использованием разнообразных технологических процессов, большинство из которых основано на применении рабочих машин и механизмов, разнообразие и число которых огромно. Там, где применяются технологические машины – используется электропривод. Практически все процессы, связанные с движением с использованием механической энергии, осуществляются электроприводам. Исключение составляют лишь некоторые транспортные и сельскохозяйственные машины (автомобили, тракторы и др.), но и в этой области перспективы использования электропривода стали вполне реальны.
Электропривод – главный потребитель электрической энергии. В развитых странах на долю электропривода приходится свыше 60% всей вырабатываемой электроэнергии.
Электроприводы различны по своим техническим характеристикам: по мощности, скорости вращения, конструктивному исполнению и другим. Мощность электроприводов прокатных станов, компрессоров газоперекачивающих станций и ряда других уникальных машин доходит до нескольких тысяч киловатт. Мощность электроприводов, используемых в различных приборах и устройствах автоматики, составляет несколько ватт. Диапазон мощности электроприводов очень широк. Также велик диапазон электроприводов по скорости вращения.
Большинство производственных рабочих машин и механизмов приводится в движение электрическими двигателями. Двигатель вместе с механическими устройствами (редукторы, трансмиссии, кривошипно-шатунные механизмы и др.), служащими для передачи движения рабочему органу машины, а также с устройствами управления и контроля образует электромеханическую систему, которая является энергетической, кинематической и кибернетической (в смысле управления) основой функционирования рабочих машин.
В более сложных технологических машинных комплексах (прокатные станы, экскаваторы, обрабатывающие центры и другие), где имеется несколько рабочих органов или технологически сопряженных рабочих машин, используется несколько электромеханических систем (электроприводов), которые в сочетании с электрическими системами распределения электроэнергии и общей системой управления образуют электромеханический комплекс.
Большие скорости обработки, высокая и стабильная точность выполнения технологических операций потребовали создания высокодинамичных электроприводов с автоматическим управлением. Стремление снизить материальные и энергетические затраты на выполнение технологических процессов обусловило необходимость технологической и энергетической оптимизации процессов; эта задача также легла на электропривод. На этапе технического развития машинного производства, достигнутого к концу XX века, электромеханические комплексы и системы стали определять технологические возможности и технический уровень рабочих машин, механизмов и технологических установок.
Создание современных электроприводов базируется на использовании новейших достижений силовой электротехники, механики, автоматики, микроэлектроники и компьютерной техники. Это быстро развивающиеся области науки, что определяет высокую динамичность развития электромеханических систем.
В последние годы с появлением доступных технических средств для регулирования скорости асинхронных двигателей для привода насосов в системах тепло- и водоснабжения стали применятся регулируемые электроприводы.
Электропривод насоса выполняет две функции: преобразует электрическую энергию в механическую, необходимую для подачи воды потребителю, и управляет работой установки таким образом, чтобы поддерживать требуемую величину напора и расхода воды.
Автоматизированный электропривод получил в последние десятилетия интенсивное ускоренное развитие. Это определяется, в первую очередь, общим прогрессом машиностроения, направленным на интенсификацию производственных процессов, их автоматизацию, повышение точностных характеристик и других технических требований, связанных с обеспечением стабильности качества производимой продукции.
Вторым обстоятельством, обусловившим развитие электропривода, явилось распространение его применения не только на промышленное производство, но и на другие сферы, определяющие жизнедеятельность человека: сельское хозяйство, транспорт, медицину, электробытовые установки и др.
Третья причина связана с наметившимся переходом от экстенсивного развития производства электрической энергии к более эффективному ее использованию. Повышение эффективности электромеханического использования электроэнергии всецело зависит от совершенствования электропривода.
2. Построение характеристик насоса для скоростей, отличных от номинальной и характеристики магистрали
Исходные данные:
 (η,4*%) (η,4*%)

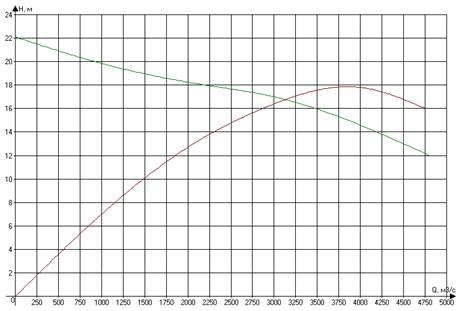
Рис. 2.1 Характеристика насоса Д5000-32-2; n=585об/мин.
Производительность и напор находятся по формулам:
 , ,  . (2.1) . (2.1)
Номинальные значения производительности  и напора и напора  соответствуют значениям на характеристике насоса для номинальной скорости. соответствуют значениям на характеристике насоса для номинальной скорости.
Рассчитаем характеристику насоса для различных скоростей по формулам 2.1. Результаты занесем в таблицу 2.1.
Далее рассчитаем характеристику магистрали по двум точкам. По заданию известно, что статический напор  м. Также известно, что при м. Также известно, что при  м3
/ч напор м3
/ч напор  м. Известно, что: м. Известно, что:
 (2.2) (2.2)
Определим  . Из формулы (2.2) имеем: . Из формулы (2.2) имеем:
 , ,
Получим:
 . .
Тогда зависимость  для магистрали выражается формулой: для магистрали выражается формулой:
 (2.3) (2.3)
Используя формулу (2.3) рассчитаем несколько точек магистрали. Результаты занесем в таблицу 2.2.
Таблица 2.1.
| Точка |
1 |
2 |
3 |
 |
Q,м3
/ч |
900 |
3000 |
4800 |
| Н, м |
20 |
17 |
12 |
 |
Q,м3
/ч |
630 |
2100 |
3360 |
| Н, м |
9,8 |
8,33 |
5,88 |
 |
Q,м3
/ч |
720 |
2400 |
3840 |
| Н, м |
12,8 |
10,88 |
7,68 |
 |
Q,м3
/ч |
810 |
2700 |
4320 |
| Н, м |
16,2 |
13,77 |
9,72 |
Таблица 2.2.
| Q,м3
/ч |
0 |
500 |
1000 |
1500 |
2000 |
2500 |
3000 |
| Н, м |
8 |
8.495 |
9.98 |
12.455 |
15.92 |
20.375 |
25.82 |
По точкам из таблиц 2.1 и 2.2 построим семейство характеристик насоса для скоростей от ωН
до 0,7ωН
и характеристику магистрали (рис.2.2).
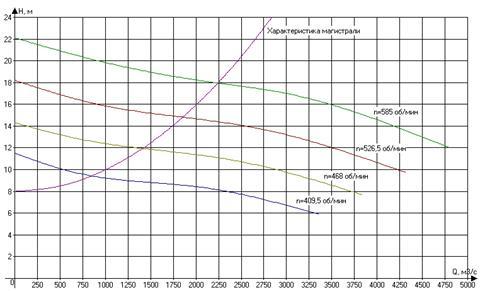
Рис. 2.2 Характеристики насоса для скоростей отличных от номинальной и характеристика магистрали.
3. Расчет и выбор электродвигателя и преобразователя частоты
Мощность насоса в кВт в рабочей точке определяется по формуле:
 , (3.1) , (3.1)
где НН
[м], QH
[м3
/ч] и ηН
- значения напора, производительности и КПД, соответствующие точке пересечения характеристики насоса и магистрали;
 - плотность перекачиваемой среды в кг/м3
; - плотность перекачиваемой среды в кг/м3
;
Получим:
 кВт. кВт.
Двигатель выбираем исходя из условия:

Выберем двигатель серии АК с фазным ротором:
Тип двигателя – АК12-42-10 УХЛ4
Синхронная частота вращения – nН
=600 об/мин.
Номинальная мощность – РН
=200 кВт.
Напряжение статора – U1л
=6000 В.
Напряжение ротора – Е2к
=500 В.
Ток ротора – I2
=270 А.
Номинальный КПД – hH
=91,0 %.
Номинальное скольжение 2.5%
Номинальный cosφ – cosφн
=0.79
Отношение максимального момента к номинальному – ММАХ
/ ММ
IN
=2.4.
Электродвигатели переменного тока с фазным ротором серии АК предназначены для привода механизмов:
– требующих регулирования частоты вращения (ленточных конвейеров и др.);
– не требующих регулирования частоты вращения, но с тяжелыми условиями пуска (вентиляторов, цементных и угольных мельниц и др.)
Двигатели предназначены для работы от сети переменного тока частотой 50 Гц, напряжением 6000 В. Номинальный режим работы — продолжительный (S1). Пуск двигателей серии АК осуществляется как вручную с помощью пускового реостата, так и автоматически с помощью магнитной станции. Пусковой реостат или магнитная станция по требованию заказчика могут поставляться комплектно с электродвигателем.
Двигатели допускают два пуска подряд из холодного состояния и один пуск из горячего состояния. Конструктивное исполнение двигателей по способу монтажа - горизонтальное, без фундаментной плиты, с двумя щитовыми подшипниками, с одним свободным концом вала для соединения с рабочим механизмом при помощи полумуфты. Двигатели выполняются защищенными. Предназначены для работы с самовентиляцией в закрытых помещениях с нормальной окружающей средой. Изоляционные материалы обмотки статора класса нагревостойкости не ниже «В».
Обмотка статора имеет шесть выводных концов, закрепленных на четырех изоляторах в коробке выводов. Схема соединения фаз — звезда.
Коробка выводов статора располагается с правой стороны, если смотреть на свободный конец вала (левое расположение указывается в заказе). Двигатели допускают правое и левое направления вращения. Изменение направления вращения осуществляется только из состояния покоя.
Структура условного обозначения:
АК — ХХ -ХХХ-Х-ХХХХ4
АК — асинхронный двигатель с фазным ротором
ХХ — габарит электродвигателя
ХХХ — полная длина сердечника статора в см
Х — число полюсов
ХХХХ — климатическое исполнение
4 — категория размещения
Степень защиты IP01
Форма исполнения 1M1001
Способ охлаждения IC01
Режим работы S1
Двигатели могут изготавливаться на напряжение 3000В.
Регулирование скорости двигателя осуществляется с помощью асинхронно-вентильного каскада.
Исходя из мощности двигателя выбираем АВК:
Тип АВК – ЭКА4-630-380.
Напряжение питания инвертора – UПИТ
=380 В.
Номинальная мощность преобразователя – РН
=500 кВт.
Номинальный фазный ток ротора – I2
=435 А.
Рабочее линейное напряжение ротора – U2, ЛИН
=680 В.
Электроприводы по схеме асинхронного вентильного каскада ЭКА-4 предназначены для регулирования скорости асинхронных электродвигателей с фазным ротором мощностью до 5000 кВт с отдачей энергии скольжения в питающую сеть и могут быть использованы для изменения производительности насосных агрегатов и поддержания давления на их выходе, а также в ряде других производственных механизмах с тяжелыми условиями пуска и частичным диапазоном регулирования скорости (дробилки, цементные вращающиеся печи и др.).
Электроприводы включают в себя тиристорно-диодный агрегат со сглаживающим дросселем и согласующим трансформатором (при питании агрегата от высоковольтной сети), блоки пусковых резисторов, станцию управления пуском и остановом электродвигателя, а также шкаф управления переключением на резервный электродвигатель и шкаф управления пуском резервного электродвигателя на пусковых резисторах.
Предусмотрено местное управление электродвигателями со станции управления и дистанционное – с пульта управления.
Электроприводы выполнены с применением микроконтроллеров серии PIC, имеют связь с ЭВМ высшего уровня по каналу RS 485.
Имеется защита роторных цепей электродвигателя от перенапряжений при исчезновении напряжения питания с высокой стороны.
Электроприводы позволяют:
существенно экономить электроэнергию;
избежать частых пусков электродвигателя при изменении подачи в замкнутых по уровню системах регулирования водоснабжения;
уменьшить эксплуатационные и капитальные затраты по сравнению с высоковольтными частотно-регулируемыми электроприводами, поскольку установленная мощность электрооборудования определяется диапазоном регулирования скорости.
4. Расчет и построение механических характеристик
Как известно, мощность насоса определяется по формуле:
 ; (4.1) ; (4.1)
Разделив обе части этого равенства на скорость, получим выражения для момента в зависимости от скорости
 ; (4.2) ; (4.2)
Используя полученную формулу, построим механическую характеристику насоса. Для этого находим по графику Q
,
H
,
η
,
соответствующие точке пересечения характеристики магистрали и характеристики насоса для одной из скоростей.
 кНм, кНм,
 с-1
, а с-1
, а
 об/мин. об/мин.
 кНм, кНм,
 с-1
. с-1
.
 кНм, кНм,
 с-1
. с-1
.
 кНм, кНм,
 с-1
. с-1
.
Таким образом, статическая механическая характеристика насоса имеет вид, изображенный на рис.4.1.
Определим показатель степени k
. Показатель степени k
определим по формуле:
 (4.3) (4.3)

Рис. 4.1 Статическая механическая характеристика насоса
Найдем из рис. 2.2 производительности и напоры, соответствующие двум разным скоростям, например  и и  . .
 с-1
; с-1
;
 м; м;
 м3
/ч; м3
/ч;
 с-1
; с-1
;
 м; м;
 м3
/ч; м3
/ч;
Подставляя полученные значения в формулу (4.3) получим:
 . .
Таким образом, статическая механическая характеристика насоса принимает вид:
 , где , где
 Нм. Нм.
Номинальный момент двигателя:
 Нм. Нм.
Для построения семейства механических характеристик двигателя при регулировании скорости с помощью асинхронно-вентильного каскада будем использовать следующее выражение:
 , ,
Где  - скольжение холостого хода; - скольжение холостого хода;
 - индуктивное сопротивление рассеяния фазы двигателя, приведенной к обмотке ротора; - индуктивное сопротивление рассеяния фазы двигателя, приведенной к обмотке ротора;
Принебрегая активным сопротивлением статора, т.е. полагая  , что допустимо для двигателей большой мощности получим: , что допустимо для двигателей большой мощности получим:
 , (4.4) , (4.4)
где  . Здесь . Здесь  - активное сопротивление ротора. - активное сопротивление ротора.
Найдем сопротивление ротора по формуле:
 Ом, где Ом, где
 кВт. кВт.
Найдем индуктивное сопротивление рассеяния фазы двигателя, приведенной к обмотке ротора из формулы:
 , ,
Т.к. Мmax
/ Мн
=2.4, то  Нм. Нм.
Тогда  Ом. Ом.
Тогда  . .
Меняя в формуле (4.4) , строим регулировочные характеристики при регулировании с помощью АВК.
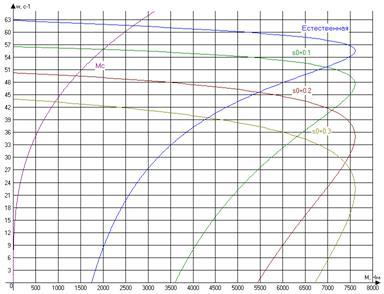
Рис 4.2 Регулировочные характеристики при регулировании с помощью АВК и статическая механическая характеристика насоса.
5. Расчет потерь скольжения, потерь в асинхронно-вентильном каскаде и потерь в роторе
Потери в роторе определяются из выражения
 . .
Известно, что на линейном участке механической характеристики асинхронного двигателя, момент прямо пропорционален току ротора, тогда из выражения
следует, что
 . .
В этом случае, формула для потерей в роторе принимает вид
 . .
Потери скольжения определяются как
 Или Или
 . .
Потери в асинхронно-вентильном каскаде определяются как
 . .
Подставляя в это выражение  и и  , получим , получим
 , ,
где  . .
Тогда потери в АВК определятся по формуле:

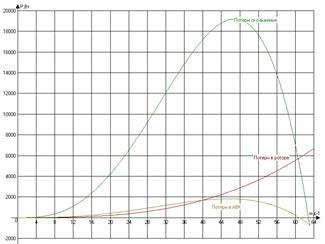
Рис 5.1 Потери скольжения, потери в роторе и в АВК
6. Расчет мощности, потребляемой из сети приводом при регулировании задвижкой и с помощью асинхронно- вентильного каскада
Мощность, потребляемая асинхронным двигателем из сети, определяется как
 . .
Для построения графика зависимости  находим на характеристике насоса (рис.2.1) при номинальной скорости двигателя напор и КПД, соответствующие заданной производительности и подставляем в приведенную выше формулу. Далее из рис.2.1 и 2.2 находим напор и КПД для работы при других скоростях. Таким образом, получим несколько точек искомой зависимости (табл.6.1), по которым и построим график зависимости мощности, потребляемой асинхронным двигателем от производительности насоса (рис.6.1). находим на характеристике насоса (рис.2.1) при номинальной скорости двигателя напор и КПД, соответствующие заданной производительности и подставляем в приведенную выше формулу. Далее из рис.2.1 и 2.2 находим напор и КПД для работы при других скоростях. Таким образом, получим несколько точек искомой зависимости (табл.6.1), по которым и построим график зависимости мощности, потребляемой асинхронным двигателем от производительности насоса (рис.6.1).
При работе с номинальной скоростью получим
 , ,  , ,  , тогда , тогда
 кВт. кВт.
Таблица 6.1.
 |
2250 |
1825 |
1425 |
825 |
 |
18 |
14.8 |
12 |
9.5 |
 |
0.68 |
0.6 |
0.47 |
0.33 |
 |
177.99 |
134.53 |
108.73 |
70.98 |
Мощность, потребляемая из сети, определяется как
 . .
При регулировании скорости с помощью АВК часть энергии скольжения теряется в роторе и в АВК, а часть возвращается обратно в сеть.
Найдем мощность, возвращаемую в сеть:

 . .
Таким образом, с учетом отдачи части энергии скольжения обратно в сеть, мощность, потребляемая из сети, определится как
 . .
Т.к. скорость двигателя прямо пропорциональна производительности
 , ,
тогда подставив это равенство в выражение для мощности, потребляемой из сети, получим
 . .
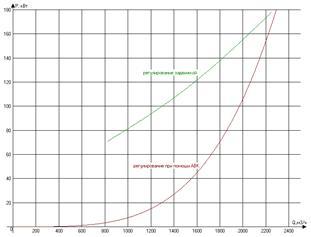
Рис. 6.1. Зависимость мощности, потребляемой из сети приводом при регулировании задвижкой и с помощью асинхронно-вентильного каскада, от производительности
Таким образом, при регулировании производительности насоса с помощью АВК имеется значительный выигрыш электроэнергии по сравнению с регулированием задвижкой.
7. Список использованной литературы
1. Соколов М.М. «Автоматизированный электропривод общепромышленных механизмов» М.:Энергия, 1976 г.
2. Ключев В.И. «Электропривод и автоматизация общепромышленных механизмов» М.:Энегрия, 1980 г.
3. Конспект лекций.
|