Міністерство освіти і науки України
Житомирський державний технологічний університет
Кафедра А і КТ
Курсовий проект
„ Система прямого регулювання тиску газу з І-регулятором
”
Теорія автоматичного керування
Виконав В. А. Клим
Перевірив С. С. Свістельник
Житомир 2007
Зміст
1. Завдання на курсовий проект
2. Аналіз і синтез лінійної неперервної САК
2.1 Структурна схема САК
2.2 Визначення передаточної функції розімкнутої та замкнутої САК відносно вхідної
2.3 Визначення стійкості системи по критерію Гурвіца
2.4 Побудова амплітудно-фазової частотної характеристики (АФЧХ) та визначення стійкості САК за критерієм Найквіста. Дослідження системи методом D – розбиття
2.5 Побудова логарифмічної частотної характеристики САК та визначення запасів стійкості
2.6 Використовуючи логарифмічні частотні характеристики, виконання корекції САК в області середніх частот з метою отримання заданих запасів стійкості по фазі та амплітуді
2.7 Схема корегуючого пристрою та розрахунок його елементів
2.8 Розрахунок та побудова графіку перехідної характеристики скорегованої САК
2.9 Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки скорегованої САК
2.10 Оцінка якості скорегованої САК
2.11 Моделювання системи в програмному модулі Simulink
3. Аналіз дискретної САК (ДСАК)
3.1 Визначення періоду дискретизації імпульсного елемента
3.2 Визначення передаточної функції розімкнутої та замкнутої ДСАК відносно вхідної дії
3.3 Визначення стійкості отриманої системи по критерію Гурвіца
3.4 Побудова логарифмічної псевдочастотної характеристики ДСАК та визначення запасів стійкості
3.5 Розрахунок та побудова графіку перехідної характеристики ДСАК
3.6 Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки ДСАК
3.7 Оцінка якості ДСАК
Список літератури
1. Завдання на курсовий проект
Система прямого регулювання тиску газу з І-регулятором
Система регулювання описується наступними рівняннями:
Регулятор:
 ,де ,де
Р3
- задане значення тиску
Р - тиск газу (величина, що регулюється);
DР - відхилення тиску;
m - переміщення регулюючого клапану;
Об'єкт керування: 
¦ - еквівалентне збурення
2. Аналіз і синтез лінійної неперервної САК
2.1 Структурна схема САК
Складаємо структурну схему САК
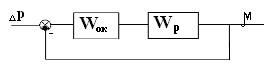
Рис. 1. Структурна схема досліджуваної САК в загальному випадку
Де:
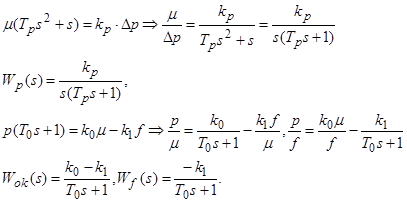
2.2 Визначення передаточної функції розімкнутої та замкнутої САК відносно вхідної
Визначимо передатні функції розімкненої та замкненої САК відносно вхідної:
а) передатну функцію розімкненої САК визначимо як добуток передатних функцій усіх ланцюгів САК, оскільки маємо послідовне з’єднання ланцюгів. Таким чином
w(s)=wок
(s)·wр
(s) = , ,
w(s) = 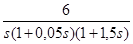 . .
б) передатну функцію замкненої САК отримаємо за формулою
Ф(s) =  : :
Ф(s) =  . .
2.3 Визначення стійкості системи по критерію Гурвіца
Визначимо стійкість системи по критерію Гурвіца:
Знаючи перехідну функцію, знайдемо характеристичне рівняння системи:
D(s)= . .
На основі отриманих коефіцієнтів характеристичного рівняння побудуємо головний визначник Гурвіца:
D =  . .
За критерієм Гурвіца для того, щоб система автоматичного керування була стійкою, необхідно та достатньо, щоб при а0
>0 всі визначники Гурвіца були додатними. Умовою стійкості для системи третього порядку будуть: а1
·a2
>a0
·a3
.
В даному випадку: а0
= 0,075 > 0; а1
·a2
= 1,55·1 = 1,55; a0
·a3
= 0,075·6 =0,45;
1,55>0,45. Умова стійкості системи виконуються, отже за критерієм Гурвіца САК стійка
.
2.4 Побудова амплітудно-фазової частотної характеристики (АФЧХ) та визначення стійкості САК за критерієм Найквіста. Дослідження системи методом D – розбиття
Побудова амплітудно-фазової частотної характеристики (АФЧХ) та визначення стійкості САК за критерієм Найквіста. Дослідження системи методом D – розбиття
а). Побудуємо амплітудно-частотну характеристику в визначимо стійкість системи по критерію Найквіста:
1) запишемо перехідну характеристику розімкнутої САК w(s)= . .
2) в рівнянні перехідної функції проведемо заміну s→j·ω та проведемо всі можливі перетворення та спрощення, тоді
w(j·ω) =  = =
=  = =
 . .
Дійсна частина цього виразу
Re(w(j·ω)) =  = Х(ω), = Х(ω),
уявна частина – Im(w(j·ω)) =  = У(ω). = У(ω).
3) Побудуємо на комплексній площині (Х0У) криву Найквіста та зробимо висновок про стійкість системи:
У(ω) = 0 → ω = 0 → Х(0) = 0;
У(ω) = 0 → ω =  =3,65 → =3,65 →
Х(14) =  = -0,273. = -0,273.
По цим точкам побудуємо криву Найквіста (рис. 5).
Критерій Найквіста: Для того щоб замкнута система була стійкою необхідно, щоб годограф розімкненої системи починаючись на дійсній вісі і рухаючись проти годинникової стрілки (при змінній частоті від 0 до ∞) не охоплював точку (-1, j0).
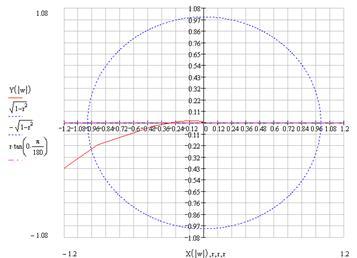
Рис.2. Крива Найквіста.
Замкнена САК охоплює точку (-1, j0), що видно на рис. 5. Отже, САК стійка
.
Визначемо запаси стійкості системи:
h=1-0,273=0,727,
j=23°.
б). Дослідження системи методом D – розбиття
За даними, що були отримані в пункті 3.3 знайдемо критичний коефіцієнт підсилення системи kкр
:
1,55 ≥ k·0,075
k ≤ 20,67
k =20,67 (теоретично розрахований коефіцієнт підсилення).
Використовуючи методику D-розбиття та за допомогою програми MathCad побудуємо межу D-розбиття, обравши за параметр дослідження коефіцієнт підсилення системи.
Характеристичний поліном САК, враховуючи, що параметр, який досліджується, коефіцієнт підсилення:
D(p) = . .
Звідси k(p) =  і k(ωj) = і k(ωj) = 
Побудуємо область D-розбиття, знаючи, що Re(k) =  , Im(k) = , Im(k) = (див. рис. 6). (див. рис. 6).
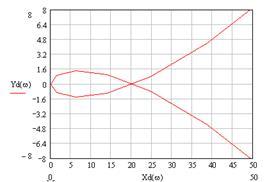
Рис. 3. Область стійкості за параметром k
На побудованій області D- розбиття можна визначити коефіцієнт підсилення (точка перетину області з дійсною віссю).
2.5 Побудова логарифмічної частотної характеристики САК та визначення запасів стійкості
1) Знаючи перехідну характеристику розімкненої САК w(s)= , ,
знайдемо нульову контрольну точку: L0
= 20lgk = 20lg6 = 15,6 дБ.
2) Визначимо спряжені частоти: ω1
=  = 20с-1
; ω2
= = 20с-1
; ω2
=  =0,67с-1
. =0,67с-1
.
3) Враховуючи, що до складу системи входить пропорційна, інтегруюча та дві аперіодичні ланки першого порядку ЛАХ і ЛФХ для даної САК (рис. 7).

Рис. 4. Відповідно логарифмічно амплітудна та логарифмічно частотна характеристики системи автоматичного керування.
Як видно з графіків, оскільки ЛАХ перетинає вісь 0ω під нахилом -40 (раніше за ЛФХ), а ЛФХ перетинає пряму –π, система є стійкою
.
Знайдемо запаси стійкості системи за ЛАХ та ЛФХ:
· по амплітуді:
ΔL = 20lg (w(j*ωс
)),
де ωс
– частота, за якої φ(ωc
) = -π. З графіка видна ωc
= 4 (див. рис.7). Тоді ΔL = 20lg (w(j*ωс
)) = 20lg (w(j*4)) = -11,8.
Порівнюємо з значенням визначеним критерієм Найквіста h=20lg(|1/Wcp|) = =20lg(|1/1,29|)= 10,7 з h=10 знайденому по рис. 7.
· по фазі:
Δφ = π-Arg(w(j*ωз
)),
де ωз
– частота зрізу, коли L(ωз
) = 1, тобто
ωз
= 1,8. Тоді Δφ = arg(w(j*1,8)) = -35°.
2.6 Використовуючи логарифмічні частотні характеристики, виконання корекції САК в області середніх частот з метою отримання заданих запасів стійкості по фазі та амплітуді
Корекцію системи проведемо при заданих якісних параметрах (час регулювання tp
= 4,7с перерегулювання δ = 30%). Побудуємо ЛАХ бажаної роботи системи та корегуючого пристрою (рис. 8).

Рис. 5. ЛАХ заданої системи (Lз
), бажаної (Lб
) та коректую чого пристрою (Lк
)
Складемо передаточні характеристики для бажаної та корегуючої систем:
wб
(s) =  Враховуючи, що Враховуючи, що
wб
(s) = wз
(s)·wк
(s),
отримаємо wк
(s) =  . .
2.7 Схема корегуючого пристрою та розрахунок його елементів
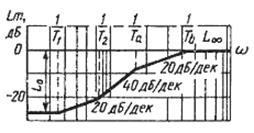
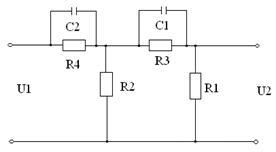
Приведемо схему корегуючого пристрою, обравши його з довідника. Згідно з наявною ЛАХ, що приведена вище, найбільше нашим вимогам задовольняє схема №33 корегуючого пристрою (рис. 6).
а) б)
Рис. 6. Схеми корегуючого пристрою та відповідні фрагменти ЛАХ:а) фрагмент ЛАХ, що відповідає схемі №33; б)схема №33 (К).
Розрахуємо кожен з елементів схем:
Для схеми №33
1) L0
= ,L¥
= ,L¥
= . .
Оберемо ємності конденсаторів: С1=100мкФ, С2=100мкФ та значення опору R2=1кОм.
2) Т1
=  Þ Þ . .
3) T2
= Þ Þ . .
4) 
Оберемо підсилювач з таким коефіцієнтом підсилення: 20lgk=37, k=10(37/20)
=70,8 (П).
Підберемо з ряду опорів Е24 відповідні значення опорів: R1 = 0,04кОм, R2 = 1 кОм, R3 = 0,5кОм, R4 = 1,5 кОм.
2.8 Розрахунок та побудова графіку перехідної характеристики скорегованої САК
Визначимо аналітичний вираз для перехідної характеристики замкнутої скоректованої системи за передаточною функцією розімкнутої САК при одиничному ступінчатому вхідному сигналі та побудуємо графік.
Передатна функція w(s) = .
Передатна функція замкненої системи:

Перехідна характеристика замкненої системи за вхідним сигналом:
H(s)=G(s)*Ф(s),
де G(s) =  - одиничний ступінчатий вхідний сигнал. - одиничний ступінчатий вхідний сигнал.
H(s) =  . .
Графік перехідної характеристики САК зображений на рис. 10.
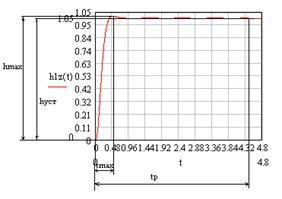
Рис. 7. Перехідна характеристика САКк
2.9 Для заданого типу збурення розрахунок та побудова графіку усталеної помилки скорегованої САК
Дослідимо точність замкнутої системи за передаточною функцією розімкнутої САК. При дослідженні визначимо три коефіцієнти помилок С0, С1, С2, використовуючи передаточну функцію замкнутої системи за похибкою:
Фx
(s) = 
Тоді
_ 
 

Тобто С0 = 0, С1 =0,17, С2 = -0,017.
Побудуємо графіки помилок в усталеному режимі при:
- одиничному ступінчатому сигналі G1(t) = 1 (G1(s) = 1/s) (рис. 11).
 - помилка від вхідної керуючої дії. - помилка від вхідної керуючої дії.
 - усталена похибка. - усталена похибка.

Рис. 8. Графік похибки САК
при сигналі G2(t) = 0.1t (рис. 12),
 - помилка від вхідної керуючої дії. - помилка від вхідної керуючої дії.
 - усталена похибка. - усталена похибка.
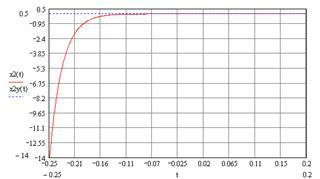
Рис. 9. Графік усталеної похибки САК
2.10 Оцінка якості скорегованої САК
Оцінимо якість перехідних процесів у заданій системі:
- перерегулювання δ – відносне максимальне відхилення перехідної характеристики від усталеного значення вихідної координати, виражене у відсотках:
δ =  . .
(hmax
, hуст
– відповідно максимальне та усталене значення перехідної характеристики для досліджуваної системи побачимо на графіку (рис.10))
δ =  . .
- час регулювання (час перехідного процесу) tp
– мінімальний час, після сплину якого регульована координата буде залишатися близькою до усталеного значення із заданою точністю  . .
 , тоді tp
= 4,5 (с). , тоді tp
= 4,5 (с).
- число коливань n, яке має перехідна характеристика h(t) за час регулювання tp
:
n = 1.
Висновок: проведений аналіз системи показав, що вона стійка, тому на етапі корекції було проведено збільшення запасів на 10% та покращення якісних параметрів.
2.11 Моделювання системи в програмному модулі Simulink
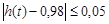
Змоделюємо систему в програмному модулі Simulink – зберемо структурну схему отриманої скоректованої системи (рис. 13).
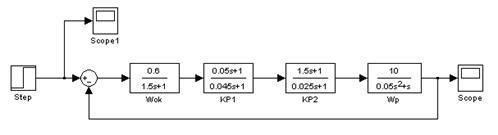
Рис. 10. Модель скоректованої САК в програмному модулі Simulink
1) Реакція системи на одиничний ступінчатий сигнал (рис. 14).

Рис. 11. Реакція системи на одиничний вхідний сигнал
Порівнюючи реакцію САК, отриману за допомогою моделювання (рис. 14), з теоретично отриманою перехідною характеристикою (рис. 10) в пункті 3.8 виявили, що вони співпали (розрахунки в обох випадках проведені правильно).
1) Побудова графіка вихідної координати при заданій вхідній дії:
g(t) = 0,1t (рис. 16).
Змоделюємо систему з заданою вхідною дією в програмному модулі Simulink (рис. 15).

Рис. 12. Модель САК з заданою вхідною дією
Реакція системи на вхідний сигнал (рис. 16).
Рис. 13. Реакція САК на задану вхідну дію
З графіків видно, що робота системи залежить від вхідного сигналу.
3. Аналіз дискретної САК (ДСАК)
В основі аналізу дискретної САК візьмемо лінійну неперервну САК після корекції з передаточною характеристикою w(s) =  . .
3.1 Визначення періоду дискретизації імпульсного елемента
В якості формоутворювача сигналу приймемо екстраполятор нульового порядку.
ωз
= 30 с-1
– максимальна частота в спектрі вхідного сигналу.
За теоремою Котельникова для нормальної роботи системи необхідно, щоб виконувалася умова Tk
=  - період дискретизації, відповідно ωк
≥ 2ωз
– частота дискретизації. Оберемо ωк
≥ 2·30 = 60 с-1
, тоді - період дискретизації, відповідно ωк
≥ 2ωз
– частота дискретизації. Оберемо ωк
≥ 2·30 = 60 с-1
, тоді
Tk
≤  (с). (с).
Виберемо період дискретизації Tk
= 0,002 с, ωк
= 1571 с-1
.
3.2 Визначення передаточної функції розімкнутої та замкнутої ДСАК відносно вхідної дії
w(z) =  . .
Спочатку розкладемо функцію на простіші дроби:
 . .
Виконаємо z-перетворення Лапласа отриманої функції:
 . .

Передатна функція замкненої ДСАК:
 . .
3.3 Визначення стійкості отриманої системи по критерію Гурвіца
Знаючи перехідну функцію, знайдемо характеристичне рівняння системи:D(s)= . .
Виконаємо білінійне перетворення
 . .
Отримаємо наступне характеристичне рівняння:

На основі отриманих коефіцієнтів характеристичного рівняння побудуємо головний визначник Гурвіца:
D =  . .
За критерієм Гурвіца для того, щоб система автоматичного керування була стійкою, необхідно та достатньо, щоб при а0
>0 всі визначники Гурвіца були додатними.
а0
=7,529>0, 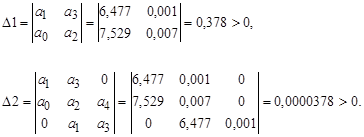
Умова стійкості системи виконуються, отже за критерієм Гурвіца САК стійка
.
3.4 Побудова логарифмічної псевдочастотної характеристики ДСАК та визначення запасів стійкості
Для побудови логарифмічної псевдочастотної характеристики використаємо передаточну функцію розімкненої системи після корекції та виконання z- перетворення:

Виконаємо
 , ,
де l - абсолютна псевдочастота, с-1
.

Знайдемо нульову контрольну точку: L0
= 20lgk = 20lg5,455 = 4,74 дБ.
Визначимо спряжені частоти:
λ1
=  = 40с-1
, λ2
= = 40с-1
, λ2
=  = 22с-1
, = 22с-1
,
λ3
=  = 555,6с-1
, λ4
= = 555,6с-1
, λ4
=  = 0,05с-1
. = 0,05с-1
.
Враховуючи, що до складу системи входить пропорційна, інтегруюча, дві аперіодичні ланки першого порядку та дві форсуючі ланки отримуємо ЛАХ і ЛФХ для даної САК (рис. 17).
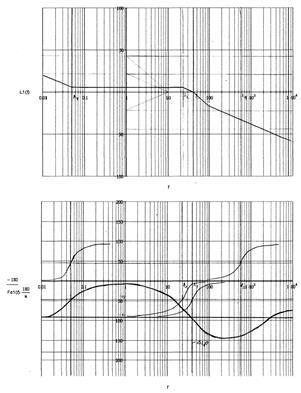
Рис. 14. Логарифмічні частотні характеристики системи.
Знайдемо запаси стійкості системи за ЛАХ та ЛФХ:
· по амплітуді запас стійкості h=µ (DL), тому що ЛФХ не перетинає межу -p.
· по фазі:
Δφ = π-Arg(w(j*ωз
)),
де ωз
– частота зрізу, коли L(ωз
) = 1, тобто
ωз
= 30. Тоді Δφ = arg(w(j*8) = -85°.
3.5 Розрахунок та побудова графіку перехідної характеристики ДСАК
Для побудови перехідної характеристики ДСАК використаємо перехідну характеристику замкненої системи отриману раніше.

Розрахуємо перехідну характеристику
ДЦСАК Y(z) = Ф(z)*G(z),
де G(z) =  - зображення вхідного одиничного сигналу. Тобто - зображення вхідного одиничного сигналу. Тобто
 . .
Побудуємо графік перехідного процесу, попередньо розклавши перехідні характеристики в ряд Лорана:
_



_

_

_

_


Тобто С0
=0,0005, C1
= 0,00075, C2
= 0,00486, C3
= 0,02112, C4
= 0,076, C5
= 0,193. За цими даними побудуємо графік - гістограму перехідного процесу (рис. 18).

Рис. 15. Перехідна характеристика досліджуваної ДСАК
Провівши розрахунки та побудову за допомогою MathLabотрималитакі результати:
 
Отримані перехідні характеристики в обох випадках не співпадають, що означає неточність розрахунків, а також специфіку розрахунку передаточних відношень в MathLab.
3.6 Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки ДСАК
Дослідимо точність замкнутої системи за передаточною функцією розімкнутої САК. При дослідженні визначимо три коефіцієнти помилок С0, С1, С2, використовуючи передаточну функцію замкнутої системи за похибкою:
Фx
(z) =  . .
Виконаємо заміну , тоді отримаємо такий вираз: , тоді отримаємо такий вираз:
 . .
Для побудови графіку усталеної похибки визначимо коефіцієнти С0
та С1
– коефіцієнти похибок, які є коефіцієнтами розкладу передаточної функції системи за похибкою Фx
(z) в ряд Маклорена за степенями s, тобто
 , в нашому випадку: , в нашому випадку:


В загальному випадку при вхідній дії, що повільно змінюється, усталену похибку системи можна представити у вигляді ряду

В нашому випадку при g(n)=20+40n+5n2
усталена похибка має вигляд:


Рис. 16. Графік усталеної похибки ДСАК.
3.7 Оцінка якості ДСАК
Для оцінки якості ДСАК розрахуємо та побудуємо перехідну характеристику.



Рис. 17. Перехідна характеристика ДСАК
Оцінимо якість перехідних процесів у заданій системі:
- перерегулювання δ – відносне максимальне відхилення перехідної характеристики від усталеного значення вихідної координати, виражене у відсотках:
δ =  . .
(hmax
, hуст
– відповідно максимальне та усталене значення перехідної характеристики для досліджуваної системи побачимо на графіку (рис.20))
δ =  . .
- час регулювання (час перехідного процесу) tp
– мінімальний час, після сплину якого регульована координата буде залишатися близькою до усталеного значення із заданою точністю  . .
 , тоді tp
= 430 (с). , тоді tp
= 430 (с).
- число коливань n, яке має перехідна характеристика h(t) за час регулювання tp
:
n = 1.
Висновок
Провівши аналіз ДСАК можна сказати, що отримана система після квантування є стійкою, коефіцієнт підсилення співпадає з коефіцієнтом підсилення лінійної САК; отримані результати вказують на те, що аналіз проведений правильно, хоча деякі якісні параметри ДСАК відрізняються від лінійної САК, це вказує на те, що деяка інформація про систему під час квантування все ж втратилась.
Список літератури
СамотокінБ. Б. Лекції з теорії автоматичного керування. –Житомир ЖІТІ, 2001. -504с.
Топчеев Ю. И. Атлас для проектирования систем автоматического регулирования. –Москва „Машиностроение”, 1989. -752с.
БесекерскийВ. А., Попов Е. П., Теория систем автоматического регулирования, 3 изд., М., 1975.
|