СОДЕРЖАНИЕ
1. Расчет коэффициента усиления САУ
2. Построение внешних статических характеристик
3. Расчет характеристических корней
4. Построение частотных характеристик САУ
5. Моделирование переходных характеристик исходной САУ
6. Проверка САУ на устойчивость
7. Синтез корректирующего устройства
8. Оптимизация САУ
Заключение
Список литературы
1.
Расчет коэффициента усиления САУ

Рис. 1. Структурная схема исходной САУ.
Параметры схемы исходной САУ:
| a1 |
0 |
b2 |
0.042 |
c1 |
0.2 |
d2 |
0 |
g |
1,8…8 |
| a0 |
6 |
b1 |
1,864 |
c0 |
3 |
d1 |
0.01 |
z |
0…-9 |

Передаточные функции звеньев:

 ; ;
Уравнение замкнутой системы имеет вид:
 , ,
где  – передаточная функция замкнутой системы по задающему воздействию; – передаточная функция замкнутой системы по задающему воздействию;
 – передаточная функция замкнутой системы по возмущающему воздействию. – передаточная функция замкнутой системы по возмущающему воздействию.
 ,(при z=0) ,(при z=0)

Расчет коэффициента усиления К
САУ (рис.1) проводим для определения его значения, при котором суммарная статическая ошибка ε
не будет превышать  при изменении задания при изменении задания  и возмущения и возмущения 
Так как кроме коэффициента усиления на величину ошибки влияют значения управляющего и возмущающего воздействий, причем наибольшая величина ε
достигается при действии на систему минимального управляющего воздействия  и максимального возмущающего z
, то при единичном коэффициенте передачи цепи обратной связи суммарная статическая ошибка может быть найдена как: и максимального возмущающего z
, то при единичном коэффициенте передачи цепи обратной связи суммарная статическая ошибка может быть найдена как:

где y
– выходная переменная.
Значение выходной переменной y
определяется реакцией САУ на сумму управляющего и возмущающего воздействий. Поэтому:
 . .
Здесь Kg
, Kz
– представляют собой суммарные коэффициенты усиления соответственно задающего и возмущающего воздействия и могут быть определены из передаточных функций системы, найденных по задающему и возмущающему воздействиям.
 ;
; 


Подставляя значение y
из выражения (3) в выражение (1) и решая полученное уравнение относительно K
, входящего в выражения для Kg
и Kz
, определяют коэффициент усиления САУ (рис.1), при котором суммарная статическая ошибка ε
не превышает заданного значения.

Суммарная статическая ошибка
 , ,

При g=1,8; z= –9:

2. Построение внешних статических характеристик
Построим внешние статические характеристики для замкнутой САУ в заданном диапазоне. Для этого построим график функции
 , ,
где

 =0,9986875, =0,9986875,
 =0.0039375, =0.0039375,
т.е.  . .
Берем три значения из заданного диапазона.
Получаем уравнение прямой для каждого значения y.
 |
 |
| g=1.8 |
y=1.797637 |
y=1.7622 |
| g=4 |
y=3.99475 |
y=3.959312 |
| g=8 |
y=7.9895 |
y=7.954063 |

Рис. 2. Графики внешних статических характеристик замкнутой САУ:
а) – значение задающего воздействия g=8
б) – значение задающего воздействия g=4
в) – значение задающего воздействия g=1.8
3. Расчёт корней характеристического уравнения
Для САУ с отрицательной обратной связью передаточная функция имеет следующий вид:

Характеристическое уравнение передаточной функции:

Найдём корни характеристического уравнения:

Решая кубическое уравнение в среде MatCad получаем корни:

Предварительно: САУ устойчива, т.к. вещественная часть комплексно сопряженных корней отрицательна. Переходная характеристика является сходящейся, с частотой
 , ,
период колебаний
 , с декрементом затухания , с декрементом затухания
 , ,
коэффициент затухания δ=-64.8.
4. Построение частотных характеристик САУ
Рассчитаем и построим логарифмические амплитудную частотную (ЛАЧХ) и фазовую частотную (ЛФЧХ) характеристики замкнутой
системы.
Передаточная функция замкнутой системы:


Получим выражение для комплексно-частотной функции:
Где:
Вещественная частотная функция:

Мнимая частотная функция:

Тогда:
Амплитудно-частотная характеристика(АЧХ):

Фазово-частотная характеристика(ФЧХ)

На практике АЧХ и ФЧХ изображают в логарифмическом масштабе. Это позволяет упростить расчет и анализ характеристик.
ЛАЧХ – логарифмическая амплиудно-частотная характеристика.

ЛФЧХ – логарифмическая фазо-частотная характеристика.

Рис.3. Логарифмические амплитудно-частотная и частотно-фазовая
Частота при которой  называется частота среза (частота единичного усиления) называется частота среза (частота единичного усиления) 
Из графиков видно, что запас устойчивости по амплитуде бесконечен, т.к. ЛФЧХ не пересекает угол -180˚.
Запас устойчивости по фазе имеет конечное значение (180˚-159˚=21˚).

Рис. 4. АФЧХ
Согласно критерию Найквиста, если система устойчива в разомкнутом состоянии, то для устойчивости соответствующей замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты от 0 до ¥ не охватывала точку (–1;j0) на комплексной плоскости.
Как видим из граф. что по Найквисту система устойчива, т.к. точку (-1,j0) АФЧХ данной условно разомкнутой САУ не охватывает.
5. Моделирование переходных характеристик исходной САУ
а) при отсутствии возмущений для граничных значений g
при подачи сигналаg=
1
.
8
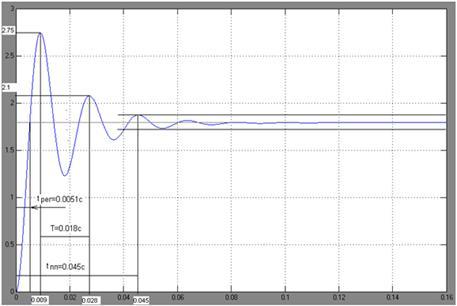
Рис. 5 Переходная характеристика САУ при минимальном задающем воздействии и отсутствии задания.
Перерегулирование:
σ=(2.75-1.79)/1.79=53.6%
Декремент затухания:
 , ,
колебательность N=5,
время переходного процесса: tпп
=0.045с
время регулирования tp
=0.0051c
частота колебаний


при подачи сигналаg
=8

Рис. 6 Переходная характеристика САУ при максимальном задающем воздействии и отсутствии задания.
Перерегулирование
σ=(12.5-7.99)/7.99=56.4%
Декремент затухания:
 , ,
колебательность N=5,
время переходного процесса: tпп
=0.045с
время регулирования tp
=0.0052с
частота колебаний
б)переходный процесс:при действующих максимальных возмущениях для граничных значений g
при подачи сигналаg
=1.8
и возмущающем воздействии z=-9

Рис. 7 Переходная характеристика САУ при максимальном возмущающем и минимальном задающем воздействиях
перерегулирование:
σ=(2.75-1.79)/1.79=53.6%
декремент затухания:
 , ,
колебательность N=5,
время переходного процесса: tпп
=0.045с
время регулирования tp
=0.0049c
перерегулирование:
σ=(178.2-1.8)/1.8=100%
декремент затухания:
 , ,
колебательность N=6,
время переходного процесса: tпп
=0.102с,
время регулирования tp
=0.0045c,
переходный процесс: при действующих максимальных возмущениях для граничных значений g при подачи сигналаg
=8,
и возмущающем воздействии z=-9

Рис. 8 Переходная характеристика САУ при максимальном возмущающем и максимальном задающем воздействиях
перерегулирование
σ=(12.5-7.99)/7.99=56.4%
декремент затухания:
 , ,
колебательность N=6,
время переходного процесса: tпп
=0.045с
время регулирования tp
=0.0049c
перерегулирование:
σ=(188-8.024)/8.024=22.4%
декремент затухания:
 , ,
колебательность N=7,
время переходного процесса: tпп
=0.14с
время регулирования tp
=0.0043c
6. Проверка САУ на устойчивость
Проверка на устойчивость замкнутой САУ производится с помощью алгебраического критерия Гурвица:
По Гурвицу: передаточная функция замкнутой системы в динамическом режиме имеет вид:

Характеристическое уравнение имеет вид:
 . .
Обозначим: 
Составляем определитель Гурвица:

 => исходная САУ устойчива. => исходная САУ устойчива.
7 Синтез корректирующего устройства, обеспечивающего настройку исходной системы на симметричный оптимум
Синтез корректирующего устройства проводится для обеспечения оптимальных показателей качества регулирования САУ путем настройки ее на симметричный оптимум.
Передаточная функция разомкнутой системы:

Коэффициент демпфирования второго звена


Характеристическое уравнение:

По средствам пакета Mathсad найдем корни характеристического уравнения:
 , т.е. , т.е. 
Где


Желаемая передаточная функция разомкнутой системы, настроенной на симметричный оптимум, имеет вид:

где  наименьшая постоянная времени нескорректированной системы. наименьшая постоянная времени нескорректированной системы.


Обозначив как  передаточную функцию корректирующего устройства (регулятора), можно отыскать:
передаточную функцию корректирующего устройства (регулятора), можно отыскать:
 .
.



Рис. 9. Структурная схема скорректированной разомкнутой САУ
Параметры корректирующих звеньев:
1. Пропорциональное звено К=199.5
2. Интегрирующие звенья
 , Т1
=0.04 с , Т1
=0.04 с
 , Т2
=1.852 с , Т2
=1.852 с
 , Т3
=0.067 с , Т3
=0.067 с
3. Дифференцирующее звено
 , Т=0.023 с , Т=0.023 с

Рис.10. Модель скорректированной САУ в Matlab
a) минимальное значение управляющего (g=1.8) и отсутствие возмущающего (z=0) воздействий: g
=1.8

Рис.11. Переходная характеристика скорректированной САУ при минимальном задающем и отсутствии возмущающего воздействия (g=1.8 z=0)
перерегулирование:

время переходного процесса: 
б) максимальное значение управляющего (g=8) и отсутствие возмущающего (z=0) воздействий: g
=8

Рис.12. Переходная характеристика скорректированной САУ при максимальнм задающим и отсутствии возмущающего воздействия (g=8 z=0)
перерегулирование:

время переходного процесса: 
в) минимальное значение управляющего (g=1.8) и максимальное возмущающее (z=9) воздействий g=8

Рис.13. Переходная характеристика скорректированной САУ при минимальном задающим и максимальным возмущающим воздействии (g=1.8 z=-9)
перерегулирование:
время переходного процесса: 
г) максимальное значение управляющего (g=8) и максимальное возмущающее (z=9) воздействий g=8

Рис.14. Переходная характеристика скорректированной САУ при максимальном задающим и максимальным возмущающим воздействии (g=8 z=-9)
перерегулирование:

время переходного процесса: 
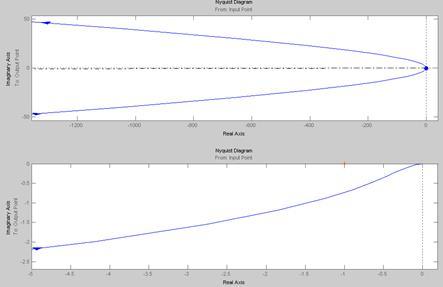
Рис.15. АФЧХ разомкнутой скорректированной САУ
Как видно из рисунка характеристика не охватывает точку [-1:0]. Из этого следует что разомкнутая, а следовательно соответственно, замкнутая САУ устойчива (по Найквисту).
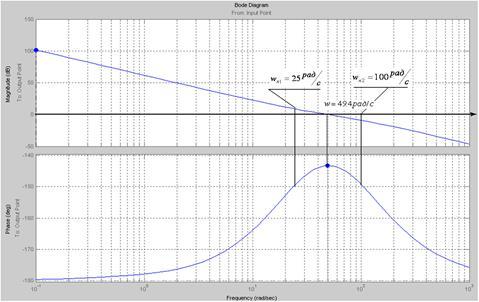
Рис.16. ЛАЧХ и ЛФЧХ разомкнутой скорректированной САУ
Запас устойчивости по амплитуде определяется величиной допустимого подъема ЛАЧХ, при котором система окажется на грани устойчивости. Из рисунка видно что запас по амплитуде бесконечен т.к. ЛФЧХ не достигает критической фазы  . . 
Запас устойчивости по фазе определяется величиной избытка фазы, на который должен вырасти запаздывание САУ при частоте среза, чтобы САУ оказалась на границе устойчивости:

8. Оптимизация САУ
Объект управления содержит в себе звено второго порядка, которое на практике реализовать достаточно трудно. Следовательно, адекватно было бы упростить объект управления, понизив его порядок. Передаточная функция ОУ имеет вид:

Имеем в звене:
- форсирующую постоянную времени
Тф
=
0.2/3=0.67с
- три инерционные постоянные времени:
Ти]
= 0.023с
Ти2
= 1.852с
Ти3
= 0.01с
Так как процесс определяет инерционная составляющая равна Ти2
=
1.852, то можно пренебречь форсажом 0.2 и малыми инерционными составляющими Ти1
=
0.023, Ти3
= 0.01. т.к. они лежат справа от рабочей полосы частот, получим ОУ вида

Для данного ОУ получим регулятор:


где наименьшая постоянная времени нескорректированной системы ( ) )



Рис.17. Схема САУ с упрощенным ОУ упрощенным регулятором
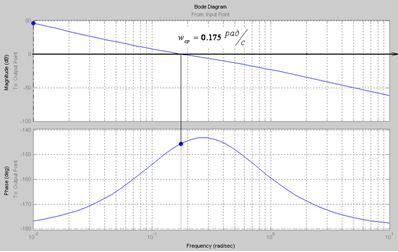
Рис.18. ЛАЧХ и ЛФЧХ разомкнутой системы с упрощенным ОУ упрощенным регулятором
Запас устойчивости по амплитуде определяется величиной допустимого подъема ЛАЧХ, при котором система окажется на грани устойчивости. Из рисунка видно что запас по амплитуде бесконечен т.к. ЛФЧХ не достигает критической фазы .
Запас устойчивости по фазе определяется величиной избытка фазы, на который должен вырасти запаздывание САУ при частоте среза, чтобы САУ оказалась на границе устойчивости:

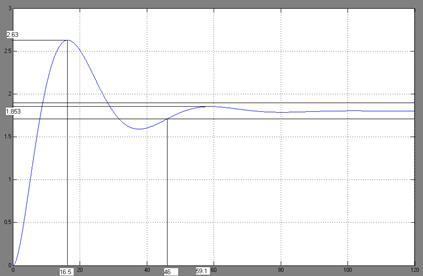
Рис.19. Переходная характеристика скорректированной САУ с упрощенным ОУ при минимальном задающем и отсутствии возмущающего воздействия (g=1.8 z=0)
Декремент затухания:
 , ,
перерегулирование:

время переходного процесса: 

Рис.10. Модель скорректированной САУ в Matlab
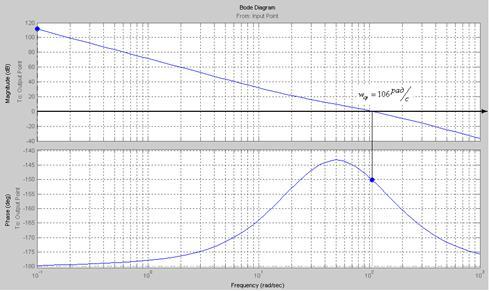
Рис.20. ЛАЧХ и ЛФЧХ разомкнутой скорректированной САУ
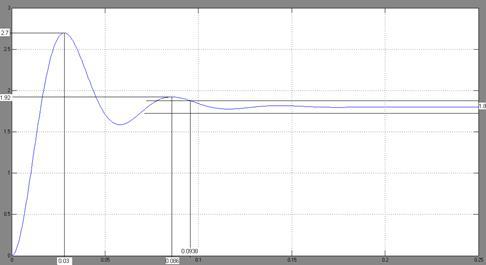
Рис.21. Переходная характеристика скорректированной САУ при минимальном задающем и отсутствии возмущающего воздействия (g=1.8 z=0)
перерегулирование:

время переходного процесса: 
Заключение
В рамках курсовой работы был проведен синтез САУ с заданным качеством. Был рассчитан коэффициент передачи исходной САУ с заданной статической ошибкой и с учетом влияния задающего и возмущающего воздействий. Были рассчитаны и построены статические внешние характеристики замкнутой САУ.
По характеристическому уравнению предварительно было определено, что исходная САУ устойчива, а график переходной характеристики представляет собой сходящиеся колебания. Для условно разомкнутой САУ были построены логарифмические характеристики (ЛАЧХ и ЛФЧХ). Так как САУ, по предварительной оценке, неустойчива, то нельзя говорить о параметрах запаса САУ по фазе и амплитуде.
По критерию Гурвица, после составления матрицы третьего порядка, было определено, что САУ устойчива. Проверку правильности решения матрицы третьего порядка провели на основе моделирования в пакете Mathlab критерия Найквиста. Был проведен синтез корректирующего устройства, обеспечивающего устойчивость исходной САУ и ее настройка на симетричный оптимум.
Были смоделированы, в пакете Mathlab, переходные процессы скорректированной САУ и определены время переходных процессов и величина перерегулирования.
На основе ЛАЧХ и ЛФЧХ скорректированной САУ был определен запас по фазе и амплитуде.
Список литературы
1. Теория автоматического управления: Учеб. для вузов. – Ч. 1. Теория линейных систем автоматического управления / Под ред. А. А. Воронова. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1986.
2. Иванов Е. А., Сильченкова В. В. Исследование качества и синтез линейных систем автоматического управления: Учеб. пособие по курсу «Теория автоматического управления». – М.: МИЭТ, 1982.
3. Иванов Е. А., Сильченкова В. В. Линейные системы автоматического управления: Учеб. пособие. – М.: МИЭТ, 1980.
|