Предмет: Теория Автоматического Управления
Тема: Дискретные системы автоматического управления
1. Дискретные системы автоматического управления
Дискретные системы – это системы, содержащие элементы, которые преобразуют непрерывный сигнал в дискретный. В дискретных системах сигналы описываются дискретными функциями времени.
Квантование - процесс преобразования непрерывного сигнала в дискретный. В зависимости от используемого вида квантования системы можно классифицировать:
- импульсные системы, использующие квантование по времени;
- релейные системы, использующие квантование по уровню;
- цифровые системы, использующие квантование по уровню и по времени (комбинированное квантование).
Квантование осуществляется с помощью импульсных модуляторов, релейных элементов, а также различного рода цифровых ключей.
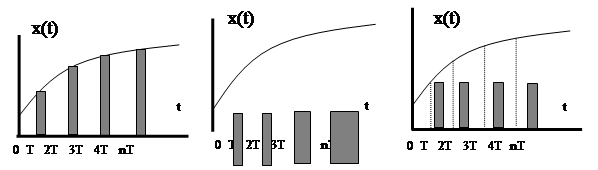
Модуляция - процесс квантования по времени. В импульсных системах в основном используются следующие виды модуляции:
- амплитудно-импульсная (АИМ)- амплитуда импульса пропорциональна амплитуде входного сигнала (рис. 1а);
- широтно-импульсная (ШИМ)- широта импульса пропорциональна амплитуде входного сигнала (рис. 1б);
- фазоимпульсная (ФИМ)- фаза импульса пропорциональна амплитуде входного сигнала (рис. 1в).
а) б) в)
Рис. 1
В релейных системах управления используется импульсная манипуляция (ИМ), в цифровых системах используются кодоимпульсная модуляция (КИМ), при этом каждому значению амплитуды соответствует «пачка» импульсов, представляющая код амплитуды передаваемого сигнала. Этот метод квантования обладает хорошей помехоустойчивостью и широко используется в цифровых системах управления.
На рис. 2 приведен пример, иллюстрирующий процесс передачи дискретных сообщений с использованием кодоимпульсной модуляции.
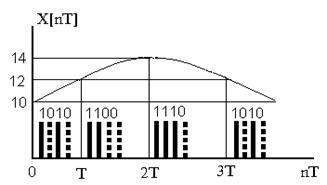
Рис. 2
При этом квантование по времени определяется тактовой частотой управляющей ЭВМ, а квантование по уровню осуществляется с помощью аналого-цифрового преобразователя (АЦП).
2. Импульсный элемент (ИЭ). Математическое описание импульсного элемента
Импульсный элемент – устройство для преобразования непрерывного сигнала в последовательность модулированных импульсов.
Импульсный элемент может быть представлен в виде двух частей: идеального импульсного элемента и формирователя импульсов.
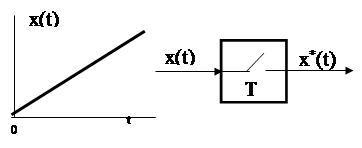
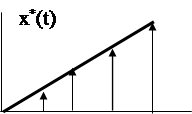
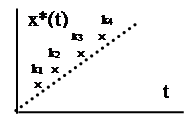
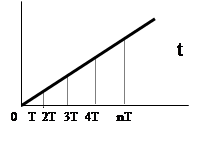
Идеальный импульсный элемент (рис. 3) преобразует непрерывный
сигнал в последовательность идеальных импульсов в виде d(t) –функций, площади которых пропорциональны амплитуде передаваемого сигнала.
Рис. 3
Для выходного сигнала импульсного элемента можно записать следующее соотношение
 , (1) , (1)
где x[nT] - решетчатая функция, которая представляет собой значение непрерывной функции в дискретные моменты времени.
При x(t) = 1(t)
 . (2) . (2)
Для любого x(t)
 . (3) . (3)
Это физически не реализуемо и является математической идеализацией, вводимой для упрощения исследования дискретных систем.
Реальный импульсный элемент (рис. 4) - импульсный элемент с конечной длительностью импульса. Он состоит из идеального импульсного элемента и формирователя.
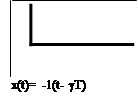
Формирователь преобразует идеальные импульсы в импульсы длительности - gT
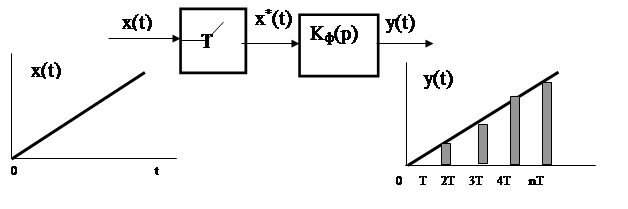
Рис. 4
Импульс конечной длительности можно представить в виде (рис. 5)
Рис. 5
Функция веса формирующего звена представляет собой импульс длительностью - gT, ее можно представить как сумму двух единичных функций противоположного знака, сдвинутых на gT
 . (4) . (4)
Передаточная функция формирователя имеет вид
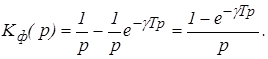 (5) (5)
Формирователь при g = 1 называется фиксатором (или экстраполятором нулевого порядка), при этом его передаточная функция равна
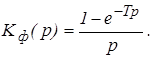 (6) (6)
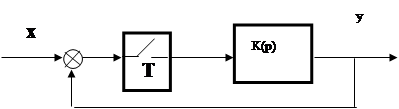
Рассмотрим импульсный элемент при g = 1 (рис. 6).
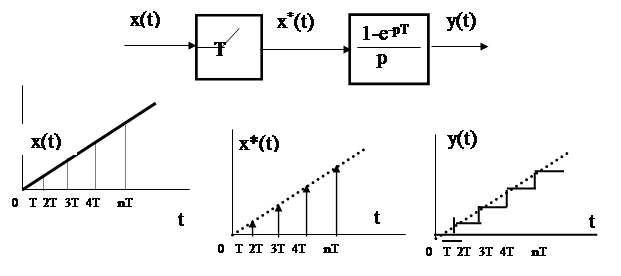
Рис. 6
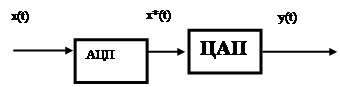
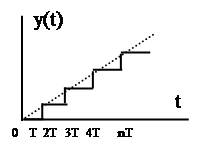
Если на вход подается аналоговый сигнал, то на выходе получаем ступенчатый сигнал. Рассмотрим схему (рис. 7), состоящую из АЦП и ЦАП:
Рис.7
Если на вход схемы поступает аналоговый сигнал, то на выходе АЦП получаем код, значение которого соответствует амплитуде входного сигнала, а на выходе ЦАП получаем ступенчатый сигнал.
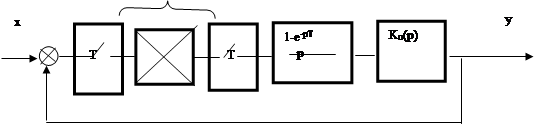
Таким образом, для того, чтобы представить процессы в цифровых системах необходимо использовать идеальный ИЭ и фиксатор. Импульсную систему можно представить в виде идеального импульсного элемента и непрерывной инерционной части, а цифровую систему в виде реального импульсного элемента и непрерывной инерционной части. Характерная схема импульсной системы управления приведена на рис. 8.
Рис. 8
Цифровая система автоматического управления (рис. 9) состоит из аналого-цифрового преобразователя (АЦП), цифро-аналогового преобразова-теля (ЦАП), цифрового автомата (ЦА) и объекта управления.

-
Рис. 9
Эту схему можно представить в виде, изображенном на рис. 10.
Ka
(z)
-
Рис. 10
При этом цифровой автомат реализует алгоритм управления в реальном масштабе времени (Ka
(z) – передаточная функция алгоритма), т. е. в течение интервала времени равного периоду дискретности –Т.
В цифровой системе квантование по уровню осуществляется с помощью АЦП, а по времени задается цифровым автоматом. Выходной преобразователь одновременно является экстраполятором нулевого порядка, сигнал на его выходе в течение периода дискретности является постоянным.
Литература
1. Бесекерский В.А., Попов Е.П. "Теория систем автоматического управления". Профессия, 2003 г. - 752с.
2. Бронштейн И.Н., Семендяев К.Н. Справочник по математике для инженеров и учащихся вузов. — М.: Наука,1986.
3. Основы теории автоматического управления / В.С. Булыгин, Ю.С. Гришанин, Н.Б. Судзиловский и др.; под ред. Н.Б. Судзиловского. М.: Машиностроение, 1985. - 512с.
4. Сборник задач по теории автоматического регулирования и управления/ Под редакцией В. А. Бесекерского. — M.: Наука, 1978.
5. Справочник по теории автоматического управления. /Под ред. А.А. Красовского- М.: Наука, 1987. - 712с.
|