Предмет: Теория автоматического управления
Тема: НЕЛИНЕЙНЫЕ ЭЛЕМЕНТЫ
1. Классификация нелинейных элементов
Нелинейные зависимости z = f(x) можно классифицировать по различным признакам:
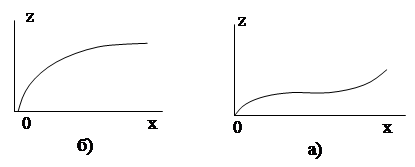
1. По гладкости характеристик: гладкая - если в любой точке характеристики существует производная dz/dx, т. е. функция дифференцируема (рис. 1а, б); кусочно-линейная - характеристика, в которой производные имеют разрыв первого (рис.2а) или второго рода (рис. 2б).
Рис. 1
 Рис.2 Рис.2
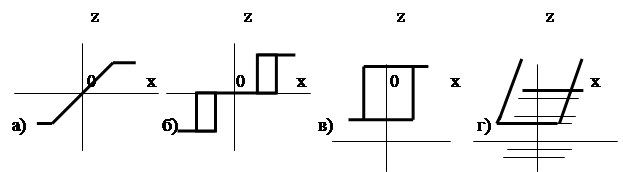
По однозначности: однозначные – в которых каждому значению вхо-дной величины соответствует одно значение выходной величины (рис. 3a); многозначные – в которых каждому значению входной величины х соответствует несколько значений выходной величины z (рис.3б, в, г).
Рис. 3
По симметрии: четно-симметричные - симметричные относительно оси ординат, т. е. z(х) = z (- х) (рис. 4а); нечетно-симметричные - сим-метричные относительно начала координат, при этом z (х) = - z ( - х ) (рис. 4б); не симметричные (рис. 4в).
Рис. 4
2. Нелинейные цепи
Нелинейными называются цепи, в состав которых входит хотя бы один нелинейный элемент. Нелинейные элементы описываются нелинейными характеристиками, которые не имеют строгого аналитического выражения, определяются экспериментально и задаются таблично или графиками.
Нелинейные элементы можно разделить на двух – и многополюсные. Последние содержат три (различные полупроводниковые и электронные триоды) и более (магнитные усилители, многообмоточные трансформаторы, тетроды, пентоды и др.) полюсов, с помощью которых они подсоединяются к электрической цепи. Характерной особенностью многополюсных элементов является то, что в общем случае их свойства определяются семейством характеристик, представляющих зависимости выходных характеристик от входных переменных и наоборот: входные характеристики строят для ряда фиксированных значений одного из выходных параметров, выходные – для ряда фиксированных значений одного из входных.
По другому признаку классификации нелинейные элементы можно разделить на инерционные и безынерционные. Инерционными называются элементы, характеристики которых зависят от скорости изменения переменных. Для таких элементов статические характеристики, определяющие зависимость между действующими значениями переменных, отличаются от динамических характеристик, устанавливающих взаимосвязь между мгновенными значениями переменных. Безынерционными называются элементы, характеристики которых не зависят от скорости изменения переменных. Для таких элементов статические и динамические характеристики совпадают.
Понятия инерционных и безынерционных элементов относительны: элемент может рассматриваться как безынерционный в допустимом (ограниченном сверху) диапазоне частот, при выходе за пределы которого он переходит в разряд инерционных.
В зависимости от вида характеристик различают нелинейные элементы с симметричными и несимметричными характеристиками. Симметричной называется характеристика, не зависящая от направления определяющих ее величин, т.е. имеющая симметрию относительно начала системы координат. Для несимметричной характеристики это условие не выполняется, т.е. Наличие у нелинейного элемента симметричной характеристики позволяет в целом ряде случаев упростить анализ схемы, осуществляя его в пределах одного квадранта.
По типу характеристики можно также разделить все нелинейные элементы на элементы с однозначной и неоднозначной характеристиками. Однозначной называется характеристика, у которой каждому значению х соответствует единственное значение y и наоборот. В случае неоднозначной характеристики каким-то значениям х может соответствовать два или более значения y или наоборот. У нелинейных резисторов неоднозначность характеристики обычно связана с наличием падающего участка, а у нелинейных индуктивных и емкостных элементов – с гистерезисом.
Наконец, все нелинейные элементы можно разделить на управляемые и неуправляемые. В отличие от неуправляемых управляемые нелинейные элементы (обычно трех- и многополюсники) содержат управляющие каналы, изменяя напряжение, ток, световой поток и др. в которых, изменяют их основные характеристики: вольт-амперную, вебер-амперную или кулон-вольтную.
В зависимости от вида составляющих нелинейных элементов, называют нелинейные цепи.
3. Коэффициент усиления нелинейного элемента
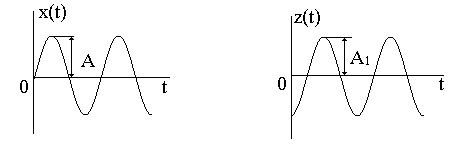
Рассмотрим нелинейный элемент (рис. 5). Подадим на вход нелинейного элемента гармонический сигнал с амплитудой – А0
и определим первую гармонику выходного сигнала.
Рис. 5
При этом для входного и выходного сигналов можно записать следующие соотношения
 (1) (1)
где:  - модуль вектора; - модуль вектора;  - аргумент вектора. - аргумент вектора.
Рассмотрим характеристику нелинейного элемента - , которая называется комплексным коэффициентом передачи нелинейного элемента. Эту характеристику можно строить в комплексной плоскости также, как и комплексный коэффициент передачи линейной части. При этом характеристика , которая называется комплексным коэффициентом передачи нелинейного элемента. Эту характеристику можно строить в комплексной плоскости также, как и комплексный коэффициент передачи линейной части. При этом характеристика  - зависит от частоты сигнала и не зависит от его амплитуды. Характеристика - зависит от амплитуды входного сигнала и не зависит от частоты, так как нелинейный элемент является безинерционным. Для однозначных характеристик его значения является действительными величинами, а для многозначных - комплексными. - зависит от частоты сигнала и не зависит от его амплитуды. Характеристика - зависит от амплитуды входного сигнала и не зависит от частоты, так как нелинейный элемент является безинерционным. Для однозначных характеристик его значения является действительными величинами, а для многозначных - комплексными.
Рассмотрим примеры построения комплексных коэффициентов передачи для наиболее характерных нелинейных элементов - .
1. Нелинейный элемент типа "усилитель с ограничением". Характеристики звена показаны на рис. 6. Подобными характеристиками обладают различного типа усилительные и исполнительные элементы автоматики (электронные, магнитные, пневматические, гидравлические и др.) в области больших входных сигналов.

Рис. 6
Если амплитуда входного воздействия меньше а, то это обычное линейное безинерционное звено, при этом коэффициент усиления к является постоянной величиной. Фазовый сдвиг между входом и выходом равен нулю, поскольку характеристика нелинейного элемента является симметричной. По мере увеличения амплитуды - коэффициент усиления уменьшается. В некоторых методах исследования нелинейных систем используется характеристика обратного комплексного коэффициента передачи нелинейного элемента (-1/). Эта характеристика приведена на рис. 6. коэффициент усиления уменьшается. В некоторых методах исследования нелинейных систем используется характеристика обратного комплексного коэффициента передачи нелинейного элемента (-1/). Эта характеристика приведена на рис. 6.
Так как фазового сдвига между гармониками входного и выходного сигнала нет, то характеристика совпадает с вещественной осью.
Нелинейный элемент типа " зона нечувствительности ". Характеристики звена показаны на рис. 7. Подобными характеристиками обладают различного типа усилители в области малых входных сигналов.

Рис. 7
Если амплитуда входного сигнала расположена в пределах диапазона ± а, то выходной сигнал равен нулю в противном случае выходной сигнал равен не нулю, так как появляются вершины входной гармоники. Фазового сдвига нет. При больших амплитудах входного сигнала коэффициент усиления имеет постоянное значение, т. е. нелинейность не оказывает существенного влияния на выходной сигнал.
3. Нелинейный элемент типа " трехпозиционное реле без гистерезиса". Характеристики звена показаны на рис.8. Эта характеристика присуща релейным системам с обратной связью.
Так как характеристика однозначная, то фазового сдвига нет. Если амплитуда входного сигнала®¥, то выходной сигнал превращается в последовательность импульсов. При малых и больших амплитудах коэффициент k - мал.

Рис. 8
4. Нелинейный элемент типа "релейная характеристика". Характеристики звена показаны на (рис. 9).
Рис. 9Первая гармоника будет сдвинута в сторону запаздывания. Величина фазового сдвига зависит от амплитуды входного сигнала и величины ± а.
Отношение амплитуд А1
/А0
при больших значениях амплитуды входного сигнала стремится к 0 , при этом фазовый сдвиг уменьшается. При малых амплитудах фазовый сдвиг равен 90°.
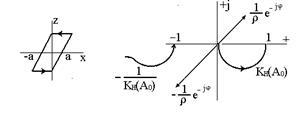
Если  - вектор, то - вектор, то  - обратный вектор. - обратный вектор.
5. Нелинейный элемент типа "люфт, зазор". Характеристики данного Рис. 10
нелинейного элемента приведены на рис. 10.
Модели нелинейных элементов. Модели нелинейных элементов могут быть реализованы путем включения в цепь операционного усилителя (на вход или в обратную связь) нелинейных двухполюсников. В зависимости от характеристик двухполюсника и способа его подключения можно реализовать любую нелинейную зависимость (рис. 11а, б, в).
Рис. 11
Модели нелинейных звеньев широко используются при моделировании систем автоматического управления на ЭВМ.
Литература
1. Атабеков Г.И., Тимофеев А.Б., Купалян С.Д., Хухриков С.С. Теоретические основы электротехники (ТОЭ). Нелинейные электрические цепи. Электромагнитное поле. 5-е изд. Изд-во: ЛАНЬ, 2005. – 432с.
2. Бесекерский В.А., Попов Е.П. "Теория систем автоматического управления". Профессия, 2003 г. - 752с.
3. Гаврилов Нелинейные цепи в программах схемотехнического моделирования. Изд-во: СОЛОН-ПРЕСС, 2002. – 368с.
4. Дорф Р., Бишоп Р. Автоматика. Современные системы управления. 2002г. – 832с.
5. Сборник задач по теории автоматического регулирования и управления/ Под редакцией В. А. Бесекерского. — M.: Наука, 1978.
|