Государственный комитет Общественного и профессионального образования
ЮЖНО-РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ (НПИ)
Институт ИИТиУ
Кафедра АИТ
Специальность УиИТС
Курсовая работа
по дисциплине “теория автоматического управления”
на тему “Расчет симметричных автоколебаний нелинейной САР”.
Выполнил студент группы 4-1 Ярочкина Н.В.
Принял Савин М.М.
“___”_________2006г.
С оценкой __________________
Новочеркасск 2006
Вариант задания С-49
В данной курсовой работе исследуется следящая система отработки угловых перемещений с местной обратной связью по скорости двигателя.
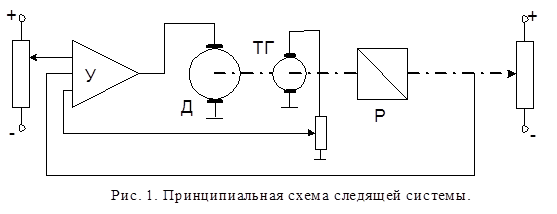

Рис. 2. Структурная схема
Параметры системы:
Ty
=0.05; TД
=0.1
НЭ: Зона нечувствительности с ограничением. Схема модели НЭ: 
Кn
=В/ba
a=0.3; b=1.1; B=10, Кn
=30.303
Варьируемым параметром является время τ постоянного запаздывания усилителя У при Кос
=0. Диапазон варьирования 0≤τ≤τmax
. Причем в начале расчета при τгр
=0 определить Кгр
и ωπ
. Затем из условия единственности решения найти τmax
=2π/ ωπ
, и считать К≤ Кгр
=const при изменении τ.
ПЛАН КУРСОВОЙ РАБОТЫ ПО ТАУ
«Расчёт симметричных автоколебаний нелинейной САР»
1. Рассчитать амплитуды А и частоты w периодических режимов в САР при различных значениях варьируемого параметра графоаналитическим методом гармонического баланса, исследовать устойчивость этих режимов и определить, какие из них являются автоколебаниями. При построении годографов применять ППП. Привести листинги ввода исходных данных и расчёта. Оцифровать графики значениями параметров w и А, указать масштабы на осях.
2. Рассчитать на ЭВМ численным методом решения уравнений гармонического баланса те же величины, что и п.1, а также граничное значение варьируемого параметра, при котором автоколебания находятся на границе своего возникновения и исчезновения. Построит зависимости параметров автоколебаний от значений варьируемого параметра. Привести листинги исходных данных и расчёта.
3. Выполнить с помощью ППП цифровое моделирование системы при значения варьируемого параметра больших и меньших граничного. Получить при этом временную диаграмму переходного процесса и соответствующую ей проекцию фазовой траектории в плоскости «величина-скорость». Привести схему моделирования, таблицы ввода структуры и параметров, распечатки диаграмм процессов во временной и фазовой областях.
4. Сделать выводы по работе, охарактеризовав процессы в САР, влияние варьируемого параметра, степень совпадения результатов расчета и моделирования и т.п.
Содержание
Введение
1. Расчет первоначальных параметров 
2. Расчетамплитуды и частоты периодических режимов графоаналитическим
методом гармонического баланса
2.1. Применение численных методов решения системы двух
алгебраических уравнений
3.Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории
4. Выводы по работе
Список литературы
ВВЕДЕНИЕ
Предметом изучения теории автоматического управления являются линейные и нелинейные системы автоматического регулирования и управления, представленные своими математическими моделями.
Цель данной курсовой работы заключается в расчёте параметров автоколебаний в нелинейной следящей системе.
Следящими называются такие системы управления, в которых происходит слежение за некоторой измеряемой величиной. Закон изменения её заранее неизвестен, а управляемая величина должна с заданной точностью воспроизводить измеряемую величину или некоторую функцию измеряемой величины.
Автоколебания, явление присущее только нелинейным системам. Автоколебания – установившейся устойчивый режим периодических колебаний во времени всех величин нелинейной системы. Для некоторых систем автоколебания являются рабочим режимом, для некоторых они недопустимы.
Симметричными автоколебаниями называются автоколебания, если их положительный полупериод симметричен отрицательному относительно оси времени.
Бывают случаи, когда автоколебания являются полезным явлением. Но также бывают и обратные, когда автоколебания желательно исключить. Наличие или отсутствие автоколебаний можно регулировать несколькими способами. Например, с помощью параметров самой системы (коэффициентов передачи), что и делается в данной работе, либо с помощью применения корректирующих цепей. Корректирующие цепи позволяют резко понизить амплитуду автоколебаний и поднять частоту или вовсе подавить их при малой зоне нечувствительности релейной характеристики.
1. Расчет 
В начале расчета необходимо преобразовать исходную структурную схему с учетом задания. После преобразования получим расчетную схему (рис. 3), которая будет содержать последовательно соединенные линейную часть (ЛЧ) и нелинейный элемент (НЭ). Линейная часть представляет собой преобразованные в единый блок линейные элементы. Определим Кгр
и ωπ
при τгр
=0, затем из условия единственности решения найдем τmax
=2π/ ωπ
.
Рис. 3.

Примем k1k2=
К
Минимальное значение коэффициента усиления К линейной части САУ, при котором автоколебания находятся на границе своего возникновения и исчезновения (полуустойчивы), называется граничным коэффициентом Кгр
.
Для нахождения частоты w
и Кгр запишем уравнение гармонического баланса
 (1.1) (1.1)
и, выделим в нем слева от знака равенства вещественную X(A,w) и мнимую Y(A,w) части:
 (1.2) (1.2)
В уравнении (1.1) приняты следующие обозначения: WЛЧ
(jw) – частотная передаточная функция ЛЧ системы; WНЭ
(A) – комплексный коэффициент передачи гармонически линеаризованного нелинейного элемента (НЭ). Wнэ(А) = q(A).
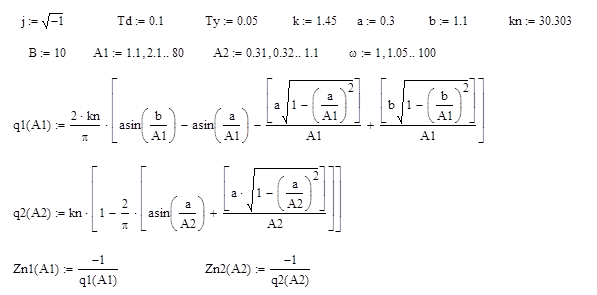
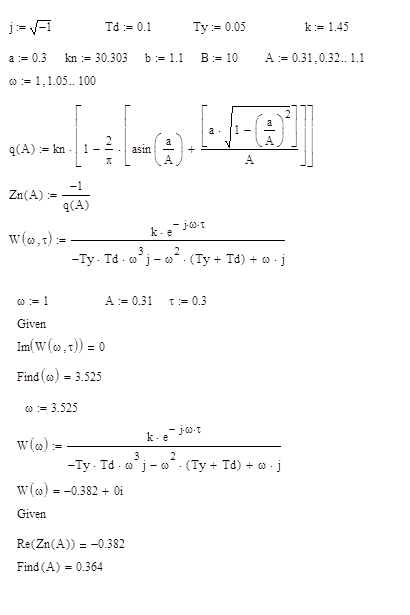
Граничное значение коэффициента усиления Кгр можно определить из системы уравнений (1.2) при значении амплитуды А, соответствующей наименьшему значению модуля функции ZНЭ
(A) = -1/ WНЭ
(A). Построим график функции ZНЭ
(A) и найдем амплитуду А, используя программу Mathcad 2001.
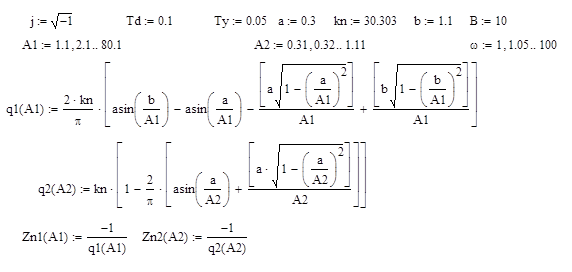
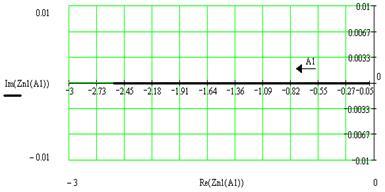 
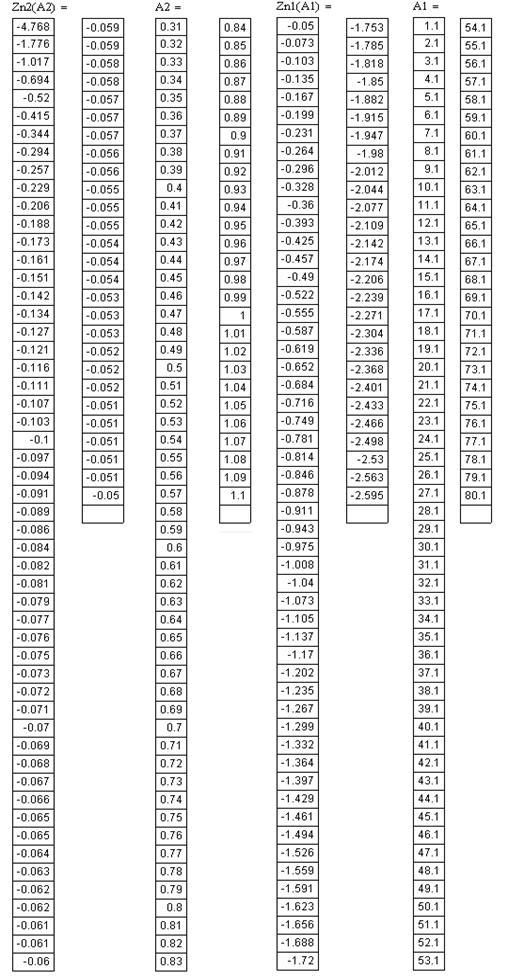
Рис. 4. Графики зависимости Z2НЭ
(A2) при a≤А2≤b и Z1НЭ
(A1) при А1≥b
Исследуя вышеприведенные графики и значения, полученные в результате расчета Z2НЭ
и Z1НЭ
,зависящих от A2 и A1 соответственно (Таблица 1.) приходим к выводу, что наименьшему значению модуля функции ZНЭ
(A) = -1/ WНЭ
(A) соответствует амплитуда A=b=1.1
Найдем значение Wнэ(А) = q(A) при А=1.1:
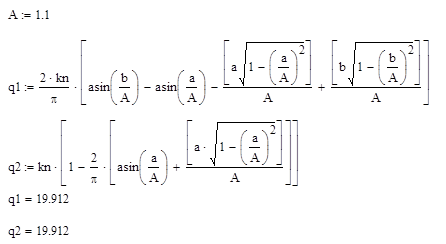
Теперь из системы уравнений (1.2) найдем граничное значение коэффициента усиления Кгр и частоту ωπ
Начальные условия:

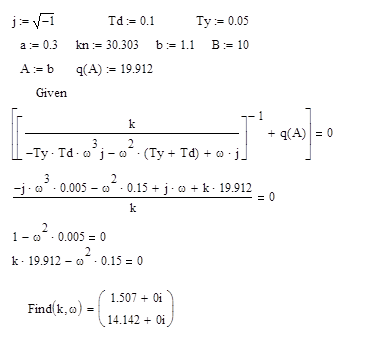
Согласно выше приведенным расчетам Кгр = 1.507,
в соответствии с условием, что  , в дальнейшем будем рассматривать К вместо произведения k1k2
и брать равным 1.45. , в дальнейшем будем рассматривать К вместо произведения k1k2
и брать равным 1.45.
Найдем τmax
(с)

Значит, необходимое нам время запаздывания будет варьировать в следующих приделах 0≤τ≤ 0.444.
Таблица 1. Значения Z2НЭ
и Z1НЭ
,зависящие от A2 и A1 соответственно при a≤А2≤b и А1≥b.
2. Расчёт амплитуды и частоты периодических режимов графоаналитическим методом гармонического баланса
Расчётная структурная схема состоит из последовательно соединённой, преобразованной в единый блок, линейной части ЛЧ и нелинейного элемента НЭ (рис.3.). При этом сигнал задания xo
полагается равный нулю, так как расчёт осуществляется для симметричных автоколебаний.

Условием возникновения периодических режимов в представленной на рис.3 нелинейной системе является основное уравнение гармонической линеаризации:
1+WЛЧ
(jw)WНЭ
(A)=0, (2)
где WЛЧ
(jw) - частотная передаточная функция ЛЧ;
 (3) (3)
Wнэ(А) = q(A) (4)
Поделим обе части уравнения (2) на  : :
 , (2
¢
) , (2
¢
)
Подставим выражения WЛЧ
(jw) и WНЭ
(A) в формулу (2
¢
):

Домножив на знаменатель, получим:
 (5) (5)
Графическое решение уравнения (2) соответствует точкам пересечения кривых WЛЧ
(jw) и ZНЭ
(A) = -1/ WНЭ
(A), по которым из кривой WЛЧ
(jw) можно определить частоты wi
возможных периодических режимов, а их амплитуды Ai
определяют из кривой ZНЭ
(A).
Заметим, что при этом могут получаться как устойчивые, так и неустойчивые периодические решения.
Анализ устойчивости этих решений в точках пересечения кривых WЛЧ
(jw) и ZНЭ
(A) осуществляется по взаимному расположению этих кривых. Рассматривая ZНЭ
(A) как параметр D-разбиения из уравнения (2), можно установить, что границей D-разбиения при этом является кривая WЛЧ
(jw). Нанеся на эту границу штриховку по известному правилу (слева по ходу при возрастании w), выделяя тем самым область устойчивости (с заштрихованной стороны характеристики ЛЧ системы).
Периодический режим устойчив, если двигаясь по характеристике НЭ в сторону возрастания амплитуды А, переходим из неустойчивой области в устойчивую область D-разбиения, и наоборот.
Заметим, что если кривые WЛЧ
(jw) и ZНЭ
(A) вообще не пересекаются, то решение уравнения (2) не существует, и автоколебания в заданной нелинейной системе невозможны. Если же указанные кривые имеют точку касания, то автоколебания в этой точке находятся на гране своего возникновения и исчезновения.
Учитывая то, что наименьшего значения функции Z2НЭ
и Z1НЭ
достигают при значении Re(Zn(A))=-0.05, определим τгр
, исходя из того, что Re(WЛЧ
(jw)) должно быть также равно -0.05 (WЛЧ
(jω) и ZНЭ
(А) должны пересекаться на вещественной оси).
Граничным называется минимальное значение  звена запаздывания САУ, при котором автоколебания находятся на границе своего возникновения и исчезновения. При граничном значении τ характеристики ЛЧ и НЭ системы автоматического управления имеют одну общую точку соприкосновения или касания. (кривые WЛЧ
(jω) и ZНЭ
(А)имеют общую касательную). звена запаздывания САУ, при котором автоколебания находятся на границе своего возникновения и исчезновения. При граничном значении τ характеристики ЛЧ и НЭ системы автоматического управления имеют одну общую точку соприкосновения или касания. (кривые WЛЧ
(jω) и ZНЭ
(А)имеют общую касательную).
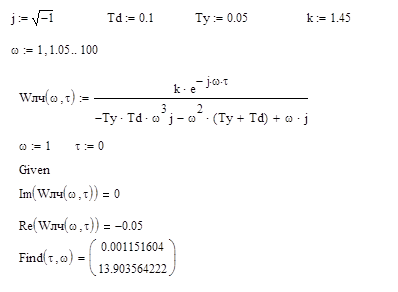 τгр
=0.00115 τгр
=0.00115
Расчёт и построение кривых WЛЧ
(jw) и ZНЭ
(A) осуществляем с помощью ЭВМ. Построим с помощью ППП Mathcad 2001 кривые WЛЧ
(jω) и ZНЭ
(А)при различных значениях варьируемого параметра τ.
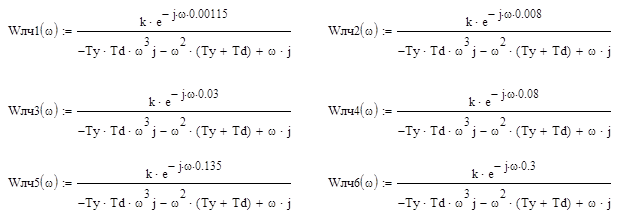
При τ< τгр
графики Wлч(jw) и Zнэ(A) пересекаться не будут. Решение уравнения (2) не существует, и автоколебания в нелинейной системе невозможны.

При τ= τгр
=0.00115 Wлч(jw) и Zнэ(A) касаются друг друга в точке с координатой -0.05 на вещественной оси, колебания находятся на грани своего возникновения и исчезновения.
 
При τ=0.008

При τ=0.03
 
При τ=0.08
  При τ=0.135 При τ=0.135

 При τ=0.3 При τ=0.3
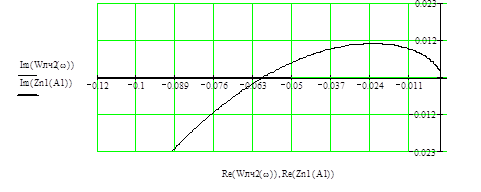
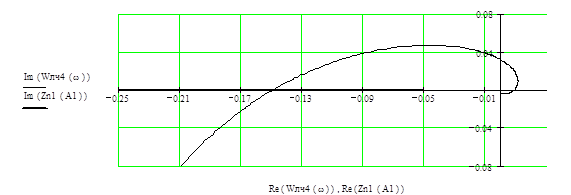
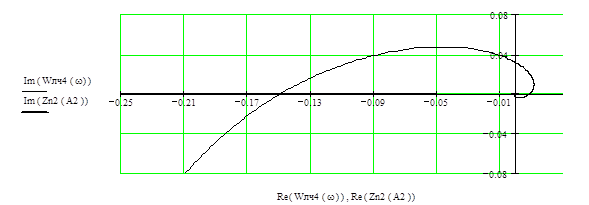
  При 0.444>τ>τгр
рассматриваемые функции Wлч(jw) и Zнэ(A) имеют одну точку пересечения. При 0.444>τ>τгр
рассматриваемые функции Wлч(jw) и Zнэ(A) имеют одну точку пересечения.
Анализ устойчивости этих решений в точках пересечения кривых WЛЧ
(jw) и ZНЭ
(A) осуществили по взаимному расположению этих кривых. Периодический режим устойчив, если двигаясь по характеристике НЭ в сторону возрастания амплитуды А, переходим из неустойчивой области в устойчивую область D-разбиения, и наоборот. Проанализировав приведенные выше графики делаем вывод, что при А≥b и 0.444>τ>τгр
периодический режим устойчив, а при a≤А≤b неустойчив.
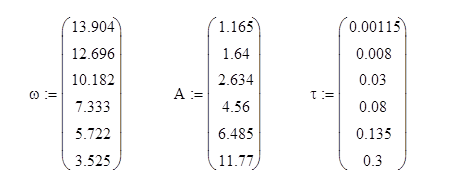
Из полученных графиков найдем значения амплитуды А и частоты ω при различных значения параметра τ.
Ниже представлен расчет при А≥b и τ = 0.00115:

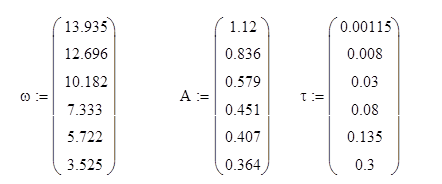
Теперь представим расчеты при a ≤А≤b и τ = 0.3
Остальные значения, приведенные в таблицах 2 и 3, получены по аналогии:
Таблица 2. Таблица 3.
| τ |
ω |
А≥b |
| 0.00025 |
-//- |
-//- |
| 0.00115 |
13.904 |
1.166 |
| 0.008 |
12.696 |
1.653 |
| 0.03 |
10.182 |
2.637 |
| 0.08 |
7.333 |
4.569 |
| 0.135 |
5.722 |
6.47 |
| 0.3 |
3.525 |
11.768 |
| τ |
ω |
a ≤А≤b |
| 0.00025 |
-//- |
-//- |
| 0.00115 |
13.904 |
1.11 |
| 0.008 |
12.696 |
0.83 |
| 0.03 |
10.182 |
0.579 |
| 0.08 |
7.333 |
0.451 |
| 0.135 |
5.722 |
0.408 |
| 0.3 |
3.525 |
0.364 |
2.1. Применение численных методов решения системы двух алгебраических уравнений.
Характеристика НЭ, входящего в заданную нелинейную систему, однозначна (q(A)), поэтому основное уравнение (1) метода гармонической линеаризации распадается на два уравнения:
 , ,
 ; (6) ; (6)
Найдем решение системы уравнений (6) при условии, что А≥b с помощью пакета прикладных программ MathCAD 2001.
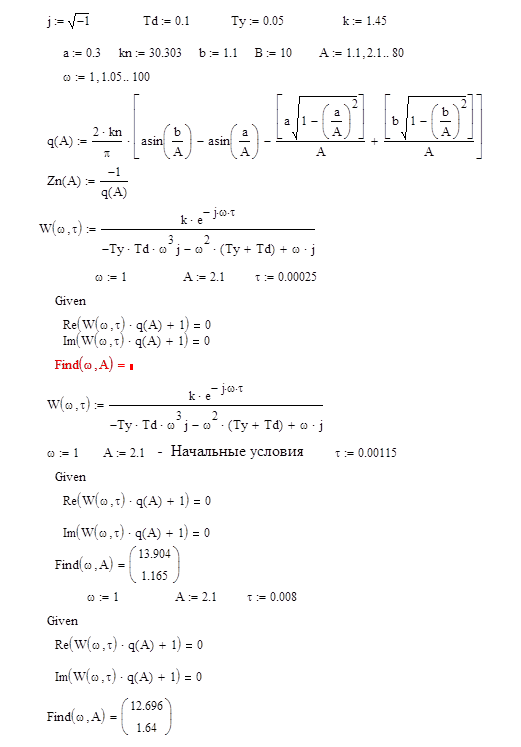
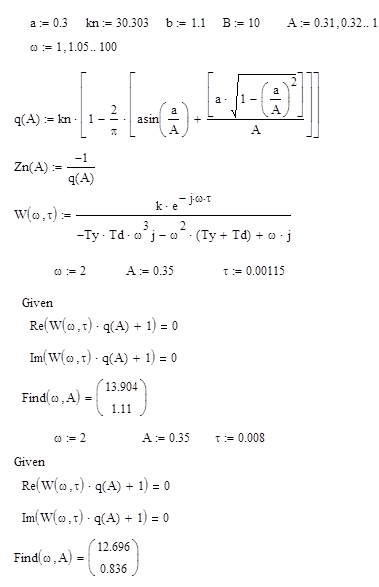  
Теперь найдем решение системы уравнений (6) при условии, что a ≤А≤b
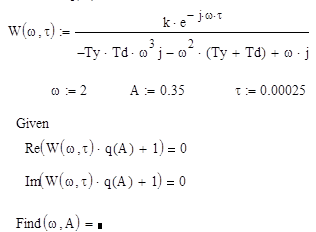  
Сведем полученные данные в таблицу 4.
Таблица 4.
| τ |
ω |
А≥b |
a ≤А≤b |
| 0.00025 |
-//- |
-//- |
-//- |
| 0.00115 |
13.904 |
1.165 |
1.12 |
| 0.008 |
12.696 |
1.64 |
0.836 |
| 0.03 |
10.182 |
2.634 |
0.579 |
| 0.08 |
7.333 |
4.56 |
0.451 |
| 0.135 |
5.722 |
6.485 |
0.407 |
| 0.3 |
3.525 |
11.77 |
0.364 |
Сравнив таблицу 4 с таблицами 2 и 3, можно сделать вывод, что погрешность между расчетами графо-аналитическим методом гармонического баланса и расчетами численным методом решения системы двух алгебраических уравнений не велика.
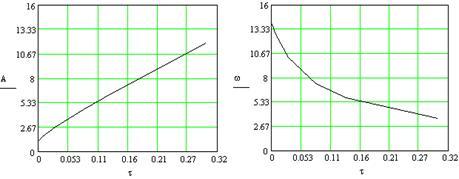
Построим зависимости параметров автоколебаний от варьируемого параметра.
Зависимость амплитуды и частоты от времени запаздывания при условии А≥b:
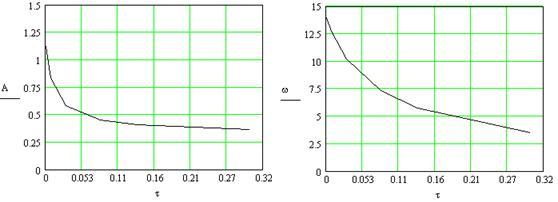
Зависимость амплитуды и частоты от времени запаздывания при условии a ≤А≤b:
Проанализировав зависимость частоты и амплитуды от параметра τ при А≥b не трудно заметить, что при увеличении транспортного запаздывания увеличивается амплитуда автоколебаний и вследствие чего уменьшается их частота.
При условии a ≤А≤b периодический режим неустойчив рассматривать зависимость амплитуды и частоты от параметра τ не имеет смысла.
3. Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории.
Моделирование осуществляем с помощью пакета программы MathLab6.5.

рис.4 Моделирование в программе Simulink
После задания параметров всех элементов схемы строим фазовые портреты и переходные характеристики.
Фазовые траектории и переходные характеристики при τ>τгр
:
τ=0.03
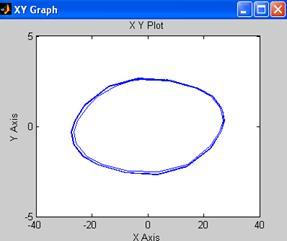
рис.5 фазовая траектория при τ=0.03
Фазовая траектория имеет один устойчивый предельный цикл, что соответствует устойчивому режиму автоколебаний
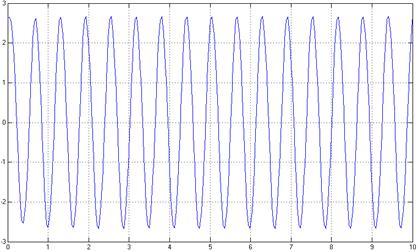
рис. 6 переходная характеристика при τ=0.03
Из графика рассчитаем значение А=2.6; w=2π/Т w=2·3.14/0.65=9.66
При  переходной процесс имеет колебательный характер, при этом устанавливаются автоколебания переходной процесс имеет колебательный характер, при этом устанавливаются автоколебания
τ=0.3
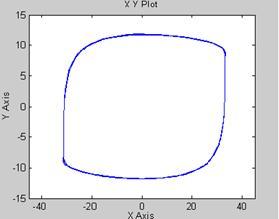
рис.7 фазовая траектория при τ=0.3
Фазовая траектория имеет один устойчивый предельный цикл, что соответствует устойчивому режиму автоколебаний
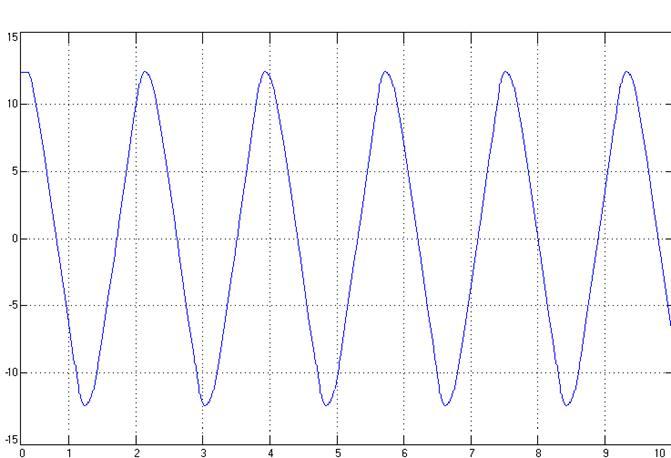
рис. 8 переходная характеристика при τ=0.3
Из графика рассчитаем значение А=12; w=2π/Т w=2·3.14/1.8=3.48
При переходной процесс имеет колебательный характер, при этом устанавливаются автоколебания.
Сравним расчетные значения и значения полученные в результате моделирования:
| τ |
А расчетнае |
А модел. |
w расчетнае |
w модел. |
| 0.003 |
2.637 |
2.6 |
10.182 |
9.66 |
| 0.3 |
11.768 |
12 |
3.525 |
3.48 |
Фазовая траектория при  < < 
τ=0.00025

рис.9 фазовая траектория при τ=0.00025
Проекция фазовой траектории на фазовую плоскость Х1
имеет сходящийся характер, что говорит об отсутствии автоколебаний
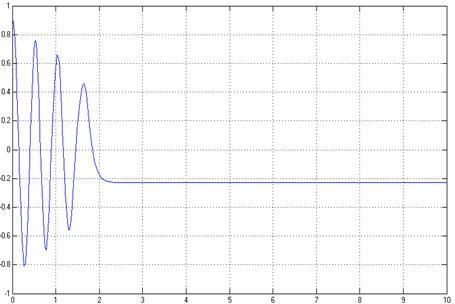
рис. 10 переходная характеристика при τ=0.00025
При  переходной процесс имеет колебательный затухающий характер. переходной процесс имеет колебательный затухающий характер.
4. Выводы по работе
В работе проведено исследование следящей системы отработки угловых перемещений с местной обратной связью по скорости двигателя. Определен диапазон варьирования параметра 0≤τ≤0.444 и рассчитано значение τгр=0.00115 (при τ = τгр колебания в системе находятся на грани своего возникновения и исчезновения).
Показано, что при значении 0.444>τ>τгр и условии А≥b в системе наблюдается устойчивый периодический режим с определённой амплитудой и частотой. При условии при a ≤А≤b периодический режим неустойчив.
Параметры автоколебаний были найдены вначале приближённым графоаналитическим методом, исходя из точек пересечения годографов WЛЧ(jw) и ZНЭ(A). В следующем пункте эти параметры были уточнены с помощью численного расчёта. Расхождение в числовых выражениях оказалось небольшим (см. таблицы 2,3 и 4).
При τ<τгр наблюдается сходящийся процесс, любое воздействие на систему приводит к затухающим колебаниям, т.е. автоколебания не возможны при любых начальных условиях.
При математическом моделировании системы на ЭВМ были получены переходные характеристики и фазовые траектории системы при разных значениях варьируемого параметра. Эти характеристики дают наглядное представление о качестве регулирования. При этом были также найдены приближенные значения амплитуды и частоты при τ=0.03 и τ=0.3.
Небольшие расхождения между искомыми значениями при использовании графоаналитического метода и цифрового моделирования это объясняется возникновением погрешности в расчетах (погрешность метода, погрешность ЭВМ) а также погрешность построения. При аналитическом расчете использовались итерационные методы решения, которые не гарантируют точного результата за конечное число операций (итераций), т.е. здесь особенно выражена погрешность метода, также есть и погрешность ЭВМ.
Изучив зависимость частоты и амплитуды от параметра τ при А≥b не трудно заметить, что при увеличении транспортного запаздывания (в данной работе мы рассматривали 0.444>τ>τгр) увеличивается амплитуда автоколебаний и вследствие чего уменьшается их частота.
Список литературы.
1. Методические указания к курсовой работе по дисциплине «Теория автоматического управления» – Савин М.М., Пятина О.Н., Елсуков В.С. - НГТУ Новочеркасск 1994 г.
2. Теория автоматического управления: Учеб. для ВУЗов: в 2 ч. /Под ред.
А.В. Нетушила. М.:Высш.шк., 1983. Ч.2.432 с.
3. Теория автоматического управления» – Савин М.М., Елсуков В.С., Пятина О.Н.,. - Новочеркасск 2005 г.
|

