Содержание
Введение
1 Термодинамические основы термоупругости
1.1 Термоупругость
1.2 Построение задачи термоупругости
1.3 Виды задач: связанная и несвязанная
2 Модель термоупругой среды
2.1 Понятие модели сплошной среды: простые и сложные
2.2 Постановка задач в механике сплошных сред
3 Линейная термоупругая сплошная среда
3.1 Классическая термоупругость
3.2 Термоупругая среда с внутренними параметрами состояния
3.3 Тепловой удар
3.4 Плоские гармонические термоупругие волны расширения в неограниченной среде
3.5 Задача отражения преломления термоупругих волн в матричной формулировке. Коэффициенты отражения преломления
Заключение
Список использованных источников
Введение
В последнее время теория термоупругости получила существенное развитие в связи с важными проблемами, возникающими при разработке новых конструкций паровых и газовых турбин, реактивных и ракетных двигателей, высокоскоростных самолетов, ядерных реакторов и др. Элементы этих конструкций работают в условиях неравномерного нестационарного нагрева, при котором изменяются физико-механические свойства материалов и возникают градиенты температуры, сопровождающиеся неодинаковым тепловым расширением частей элементов.
Неравномерное тепловое расширение в общем случае не может происходить свободно в сплошном теле; оно вызывает тепловые (термические, температурные) напряжения. Знание величины и характера действия тепловых напряжений необходимо для всестороннего анализа прочности конструкции.
Тепловые напряжения сами по себе и в сочетании с механическими напряжениями от внешних сил могут вызвать появление трещин и разрушение конструкции из материала с повышенной хрупкостью. Некоторые материалы при быстром возникновении напряжений, обусловленном действием резко нестационарного температурного поля, становятся хрупкими и не выдерживают теплового удара. Повторное действие тепловых напряжений приводит к термоусталостному разрушению элементов конструкции. Действие тепловых напряжений может вызвать значительную пластическую деформацию, ведущую к полному или прогрессирующему разрушению конструкции, термовыпучивание тонкостенной конструкции и т. п.
Исследования по термоупругости сначала стимулировались задачами о термоупругих напряжениях в элементах конструкций. Они проводились на основе теории, разработанной Дюамелем (1838) и Нейманом (1841), которые исходили из следующего предположения: полная деформация является суммой упругой деформации, связанной с напряжениями обычными соотношениями, и чисто теплового расширения, соответствующего известному из классической теории теплопроводности температурному полю.
С принципиальной точки зрения теория Дюамеля — Неймана [1], [2] для нестационарных тепловых и механических воздействий оказалась ограниченной: она не позволяет строго описать движение упругого тела, связанное с его тепловым состоянием. При определенных условиях нестационарный нагрев сопровождается динамическими эффектами в конструкции.
В общем случае изменение температуры тела происходит не только вследствие подвода тепла от внешних источников, но и в результате самого процесса деформирования. При деформировании тела от механических или тепловых воздействий, протекающих с большой скоростью, возникает так называемый эффект связанности, обусловленный взаимодействием полей деформации и температуры. Он проявляется в образовании и движении тепловых потоков внутри тела, возникновении связанных упругих и тепловых волн, термоупругом рассеянии энергии и т. п.
Последовательное рассмотрение процессов упругого деформирования и теплопроводности в их взаимосвязи возможно только на основе термодинамических соображений. Томсон (1855) [3] впервые применил основные законы термодинамики для изучения свойств упругого тела. Ряд исследователей Л.Д. Ландау и Е.М. Лифшиц (1953) [4] и др. с помощью методов классической термодинамики получили связанные уравнения термоупругости. Однако в рамках классической термодинамики строгий анализ справедлив лишь для изотермического и адиабатического обратимых процессов деформирования. Реальный процесс деформирования, неразрывно связанный с необратимым процессом теплопроводности, является в общем случае также необратимым. Термодинамика необратимых процессов, разработанная в последние годы, позволила более строго поставить задачу о необратимом процессе деформирования и дать единую трактовку механических и тепловых процессов, нашедшую отражение в работах Био (1956), Чедвика (1960), Боли и Уэйнера (I960) и др. В связи с этим более четко определилась теория термоупругости, обобщающая классическую теорию упругости и теорию теплопроводности. Она охватывает следующие явления: перенос тепла теплопроводностью в теле при стационарном и нестационарном теплообмене между ним и внешней средой; термоупругие напряжения, вызванные градиентами температуры; динамические эффекты при резко нестационарных процессах нагрева и, в частности, термоупругие колебания тонкостенных конструкций при тепловом ударе; термомеханические эффекты, обусловленные взаимодействием полей деформации и температуры.
Сановное положение термодинамики необратимых процессов, вытекающее из предположения о локальном термодинамическом равновесии, заключается в том, что первый и второй законы классической термодинамики справедливы и для локально равновесных макроскопических частей системы. Для математического выражения второго закона термодинамики в случае твердых деформируемых тел, состояние которых определяется большим числом независимых переменных, удобной является формулировка, разработанная Н.Н. Шиллером (1897—1901) [5], Каратеодори (1909) [6] и Т.А. Афанасьевой-Эренфест (1925—1928) [7]. В этой формулировке устанавливается общий эмпирический принцип о невозможности определенных процессов — принцип адиабатической недостижимости. Принципы локального термодинамического равновесия и адиабатической недостижимости позволили использовать разработанный Гиббсом (1875—1878) метод термодинамических функций для вывода соотношений между напряжениями и деформациями, выражений для свободной энергии, внутренней энергии, энтропии и связанного уравнения теплопроводности.
В теории термоупругости обычно накладывается ограничение на величину термического возмущения: приращение температуры предполагается малым по сравнению с начальной абсолютной температурой. Снятие этого ограничения не нарушает предположения о малости деформаций, но приводит к появлению нелинейных членов в связанных уравнениях термоупругости. Возможно построение единой теории термоупругости без указанного ограничения в рамках предположения о малости деформаций, учитывающей зависимость упругих и термических коэффициентов от температуры. В общем случае она является нелинейной теорией связанной термоупругости и в качестве частных случаев охватывает как линейную теорию связанной термоупругости при малом термическом возмущении, так и теорию несвязанной термоупругости при большом термическом возмущении, использующую линейные уравнения движения и нелинейное уравнение теплопроводности.
При исследовании динамических задач термоупругости учет связанности полей деформации и температуры дает возможность выявить новые качественные особенности протекания процесса деформирования. Анализ сравнительно простого решения одномерной задачи о распространении плоских гармонических термоупругих волн в неограниченном теле позволяет правильно понять основные черты термоупругих явлений при разных частотах волн и параметрах связанности материала. В качестве основных граничных связанных задач термоупругости следует отметить двумерные задачи о распространении плоских термоупругих волн вдоль поверхности полупространства и продольных термоупругих волн в длинном цилиндре.
Построение решений связанных задач термоупругости для тел конечных размеров вызывает значительные математические трудности. Большой интерес поэтому представляют вариационные принципы связанной термоупругости, и в частности вариационный принцип Био, позволяющие развить приближенные методы решения связанных задач динамической теории упругости и нестационарной теплопроводности.
Все выше сказанное доказывает актуальность и ценность темы термоупругости и изучения ее моделей.
Математические модели и методы термомеханики. В математических моделях термомеханики рассматривают различные способы распространения тепла в сплошных средах. Считается, что распространение тепла может проходить за счет теплопроводности (тепло передается через само вещество), конвекции (тепло передается за счет относительного движения частиц нагретого тела) и излучения (перенос тепла осуществляется за счет электромагнитного излучения). Математические модели теплопроводности были впервые разработаны в XIX в. в работах С. Duhamel и G. Lame[8]. Систематическое изложение методов теплопроводности дано в работах А. В. Лыкова [9], Г. Карслоу, Д. Егеря [10]. Тепло за счет теплопроводности распространяется при наличии распределенных и точечных источников и стоков тепла в теле. Распространение тепла всегда сопровождается также возникновением в теле напряжений, деформаций и, быть может, электромагнитных полей. Исследованию напряженно-деформированного состояния тел с учетом различных связей между напряжениями, деформациями и температурой, а также электромагнитными полями, и составляет основу современных моделей термомеханики. Например, предложены математические модели, в которых отражены зависимость температуры от времени, от теплофизических постоянных материала, различных форм взаимодействия полей температур и деформаций, связи тепловых, упругих и электромагнитных полей, способа задания температурных полей и др. Разработаны математические модели решения задач. Коротко остановимся на некоторых из этих моделей и методов.
Модели термомеханики без учета электромагнитных полей. Основные законы термодинамики для изучения свойств термоупругого тела впервые применил Томсон, а затем развили Н.Н. Шиллер [5], Каратеодори, Т.А. [6] Афанасьева-Эренфест [7]и другие. В этом случае модель получалась динамической и связанной, т.к. в уравнении теплопроводности и уравнениях движения учитывались слагаемые деформационного нагрева и инерционные члены.
Среди работ, посвященных решению связанных задач термоупругости, отметим работы В. Новацкого [11], В.Г. Карнаухова [12], О.П. Червинко, И.К. Сенченкова, Е.В. Доли [13], Л.А. Фильштинского, Ю.В. Сиренко [14] и др.
Термоупругое состояние является следствием уже распределенных температурных полей. Представление общего решения такой задачи в практически удобной форме было предложено в работах П.Ф. Папковича [15], [16]. При этом решение однородного уравнения для вектора перемещения содержит вектор и скаляр, являющиеся произвольными, а частное решение соответствующего неоднородного уравнения, отвечающее уже определенному температурному полю, определяется через скалярную функцию, получившую название термоупругого потенциала перемещений. Первое систематическое изложение теории несвязанной термоупругости для изотропного тела было дано Н.Н. Лебедевым [17], для анизотропного тела И.А. Прусовым [18], А.И. Уздалевым [19].
В линейной теории термоупругости считается, что максимальное изменение температуры мало по отношению к начальной абсолютной температуре. Случай больших изменений температуры в рамках предположения о малости деформации приводит к необходимости учета нелинейных членов в связанных уравнениях термоупругости, а также зависимости тепловых и упругих свойств от температуры.
В рамках предположения о малости деформаций построены модели теории теплопроводности и термоупругости, учитывающие зависимость тепловых и упругих свойств материала от температуры.
Особенно широкое развитие получили теории теплопроводности и термоупругости в случае изотропных пластинок и оболочек, ослабленных отверстиями и трещинами. Для решения таких задач использовались методы комплексных потенциалов, сингулярных интегральных уравнений, функций Грина, малого параметра, дисторсии, интегральных преобразований, асимптотические методы, метод конечных элементов. Наиболее удобными в использовании оказались методы комплексных потенциалов.
Широкие исследования термоупругого состояния были выполнены для анизотропных пластинок, тонких плит и оболочек. Основываясь на исследованиях, [20] А.И. Уздалев для решения плоских задач теплопроводности и термоупругости ввел обобщенные комплексные потенциалы термоупругости, позволившие решить различные задачи для односвязных областей. С использованием метода линейного сопряжения решены некоторые задачи термоупругости для некоторых классов анизотропных материалов. Общий подход к построению комплексных потенциалов и решения задач термоупругости в случае многосвязных пластинок и плит был предложен С.А. Калоеровым и А.С. Космодамианским [21], ими был решен ряд задач, когда на контурах отверстий задавались значения температуры, во внутренних точках действуют сосредоточенные источники тепла.
С использованием методов интегральных преобразований в некоторых работах Р.М. Кушнира, Т.М. Николишина [22], В.А Осадчука, В.П. Шевченко, А.С. Гольцева [23], были решены задачи термоупругости для ортотропных оболочек и пластин.
Достаточно много исследований термоупругого состояния проведено и для термовязкоупругих сред. В э той области можно отметить работы А.А. Ильюшина, Б.Е. Победри [25], В.Г. Карнаухова, И.К. Сенченкова, Б.П. Гуменюка [26], В.Г. Карнаухова И.Ф. Киричок [27], Ю.Н. Шевченко, Ю.Г. Савченко [28]. Разработке теории и методов расчета задач термопластичности посвящены работы Ю.Н. Шевченко [29 – 31].
Особое внимание в задачах термомеханики уделяется способу задания тепловой нагрузки и ее моделированию при решении конкретных задач. В этой области проведен ряд исследований, в которых учитывались различные формы моделирования тепловой нагрузки: задание значений температуры и плотности потоков тепла на границе, сосредоточенных источников тепла, однородных потоков тепла на бесконечности. Сосредоточенный источник тепла, как правило, рассматривается как предельный случай задания на контуре кругового отверстия потока тепла постоянной плотности, когда контур стягивается в точку. Обзору основных моделей и методов термоупругости посвящены статьи В.Г. Карнаухова [32], А.Д. Коваленко [33], [34], В.В. Мелешко [35], T.R. Tauchert[36].
Модели термомеханики с учетом электромагнитных полей. Изучением термомеханического поведения деформируемых твердых тел с учетом электромагнитных полей, связанных с механическими и тепловыми процессами в теле, занимается механика связанных полей. Основные положения моделей механики сплошной среды, учитывающие взаимодействия полей различной физической природы, изложены в работах С.А. Амбарцумяна [37], А.Н. Гузя, Ф. Г. Махорта [38], А.А. Ильюшина [39], Л.Д. Ландау, Е.М. Лившица [4], Ж. Можена, В. Новацкого [40], В.З. Партона, Б.А. Кудрявцева[41], H.A. Haus[42] и др. При построении таких моделей механики деформируемого твердого тела влияние электромагнитного поля на термомеханическое поведение тела реализуется через пондеромоторные силы и их моменты, а также через источники дополнительной энергии, возникающие при взаимодействии тела с внешним электромагнитным полем. При этом формулируются макроскопические уравнения электродинамики Максвелла, описывающие поле во внешней среде и в теле с учетом характеристик поля, таких как токи проводимости, поляризация и намагничивание. На сегодняшний день существуют несколько подходов к получению макроскопических уравнений электродинамики тел, способных к поляризации и намагничиванию, и определению характеристик электромагнитного поля в теле и энергии в нем.
Наиболее распространенными в литературе такими подходами являются статистическая модель, модель Лоренца [43], двудипольная модель и модель Максвелла – Минковского.
В статистической модели [45]путем статистического осреднения в электромагнитных полей и уравнений электродинамики на микроуровне, вызванные движением точечных носителей зарядов (электроны, ядра) в рамках стабильных структур (атомы, молекулы, ионы), определяются макроскопические поля и уравнения Максвелла, причем соотношения для поляризации и намагнивания на макроуровне получаются как средние статистические от магнитного и дипольного моментов в теле.
В модели Лоренца [43], [44] тело считается состоящим из положительно и отрицательно электрически заряженных элементарных частиц, движущихся в вакууме под действием их собственных или внешних полей. В этом случае происходит перераспределение микрозарядов и микротоков в сплошной среде, возникают микроскопические электромагнитные поля. Макроскопические уравнения и поля получаются путем пространственно-временного осреднения уравнений и полей на микроуровне, намагниченность и поляризация понимаются как средние плотности магнитного и дипольного моментов в теле.
При рассмотрении тела в двудипольной модели считается: оно состоит из движущихся материальных частиц-носителей электрических, магнитных зарядов, свободных зарядов и токов, создающие электромагнитное поле в среде. При этом поляризация и намагниченность моделируются электрическими и магнитными диполями, состоящие из пары положительных и отрицательных электрических и магнитных зарядов соответственно. На основе такого представления формулируется макроскопическая система уравнений электродинамики. В этой модели характеристики поля выводятся из предположения, что на каждый заряд в поле действует сила Лоренца, на диполь – момент таких сил.
В модели Максвелла – Минковского в отличии от рассмотренных выше моделей, в которых макроскопические электромагнитные поля и уравнения электродинамики получается путем осреднения полей и уравнений на микро-уровне, уравнения электродинамики для движущегося тела получаются из уравнений Максвелла для неподвижного тела, исходя из предположения Лоренц – инвариантности уравнений электродинамики. Выражения для характеристик поля и энергии получаются из закона сохранения для системы взаимодействия электромагнитного поля и среды, предполагая замкнутость механической и незамкнутость электрических подсистем.
Отметим также, что в литературе предложены и более сложные подходы, учитывающие не только заряды, а и спины, магнитные моменты. При этом, кроме известных электромагнитных сил, вводятся еще и обменные, спин-орбитальные, спин-спиновые силы.
На основе описанных моделей с использованием локально-равновесной или рациональной термодинамики предложены некоторые обобщенные термодинамические модели, описывающие упругую, вязкоупругую, пластическую деформацию тел, способных к поляризации и намагничиванию и обобщающие классические модели линейной термоупругости, а также термовязкоупругости, термовязкопластичности. Кроме уравнения Максвелла, эти модели учитывают различные теплофизические свойства материалов тел, а именно: электропроводимость, пьезоэффект, пироэффект и др.
Исследования термоупругого состояния. Двумерные и плоские задачи. В настоящее время наиболее полно разработаны плоские задачи теплопроводности и термоупругости изотропных и анизотропных сред. Разработке подходов к их решению посвящены монографии Г.С. Кита, М.Г. Кривцуна [46], А.Д. Коваленко [47] , А.С. Космодамианского, С.А. Калоерова [21], Н.Н. Лебедева [17], И.А. Прусова [18], Г.Н. Савина [48], А.И. Уздалева [19]и др. С использованием этих методов решен ряд задач для односвязных и многосвязных сред.
Проведены многочисленные исследования термоупругого состояния изотропной пластинки с отверстием или трещиной. При этом в качестве тепловых воздействий выступали сосредоточенные источники тепла или однородный поток тепла на бесконечности. Много исследований проведено и для многосвязных сред. Например, известны исследования для изотропного кругового диска с отверстиями, включениями или трещинами при действии сосредоточенных источников тепла и разности температур. Решено также множество задач термоупругости для бесконечных изотропных тел с двумя и конечным числом отверстий. В работах решены двоякопериодические задачи теплопроводности и термоупругости для пластинки в случае задания на контурах отверстий постоянной одинаковой температуры, на поверхности пластинки постоянного потока тепла.
В работах С.А. Калоерова, Ю.С. Антонова [49] – [51] предложена методика решения задач теплопроводности и термоупругости для конечных и бесконечных многосвязных анизотропных пластинок c отверстиями и трещинами. Решение построено на использовании теории функции комплексного переменного и удовлетворении граничным условиям методом наименьших квадратов.
1 Термодинамические основы термоупругости
1.1 Термоупругость
Основное уравнение термоупругости. При термическом расширении изотропное тело деформируется таким образом, что компоненты деформации  отнесенные к системе прямоугольных осей х1 x2 x3 определяются выражением (1.1.1) отнесенные к системе прямоугольных осей х1 x2 x3 определяются выражением (1.1.1)
 , (1.1.1) , (1.1.1)
Допускается, что  достаточно мало для того, чтобы термические свойства тела оставались постоянными на том отрезке времени, который нас интересует. Суммарная деформация тела выражается через компоненты вектора перемещения u1 следующим уравнением: достаточно мало для того, чтобы термические свойства тела оставались постоянными на том отрезке времени, который нас интересует. Суммарная деформация тела выражается через компоненты вектора перемещения u1 следующим уравнением:
 (1.1.2) (1.1.2)
где  обозначает частную производную обозначает частную производную  . Эта суммарная деформация состоит из термической деформации и упругой деформации, компоненты которой . Эта суммарная деформация состоит из термической деформации и упругой деформации, компоненты которой  определяются соотношением (1.1.1) определяются соотношением (1.1.1)
 , (1.1.3) , (1.1.3)
где τij — компоненты тензора напряжений; величина
θ = τij(1.1.4)
является суммой главных напряжений; λ и μ — упругие постоянные Ламе для тела. Подставляя соотношения (1.1.1) — (1.1.3) — в уравнение

получим тензорное уравнение
 , (1.1.5) , (1.1.5)
Решая это тензорное уравнение относительно компонентов тензора напряжений, найдем
 (1.1.6) (1.1.6)
где
 (1.1.7) (1.1.7)
обозначает расширение тела и
γ = α(3λ + 2μ). (1.1.8)
Физический закон, выраженный тензорным соотношением (1.1.6), называется законом Дюамеля — Неймана
Термодинамическими переменными, описывающими состояние упругого тела, являются компоненты деформации (1.1.2) и абсолютная температура Т + . .
Используя методы термодинамики обратимых процессов, Био показал, что энтропия s единицы объема тела определяется соотношением
 (1.1.9) (1.1.9)
где аддитивная постоянная, входящая в определение энтропии, была выбрана таким образом, что энтропия была равна нулю в начальном состоянии. В этом уравнении ρ — плотность тела, с — удельная теплоемкость единицы массы (принимаемая независимой от температуры вблизи равновесной температуры T), и γ определяется формулой (1.1.8). Если мало по сравнению с Т то соотношение (1.1.9) сводится к простому выражению для энтропии единицы объема
 (1.1.10) (1.1.10)
Таким образом, количество тепла, поглощаемое единицей объема в процессе малых деформаций и малых изменении температуры, определяется формулой
h=Ts = ρс+ γTΔ(1.1.11)
Из теории теплопроводности в твердых телах известно, что изменение температуры внутри изотропного тела подчиняется уравнению
 (1.1.12) (1.1.12)
k— коэффициент теплопроводности тела;
q — количество тепла;
выделяемого в единице объема тела. Подставляя выражение (1.1.10) в соотношение (1.1.11), найдем
 (1.1.13) (1.1.13)
Если ввести коэффициент температуропроводности
 , ,
то последнее уравнение можно записать в форме
 (1.1.14) где (1.1.14) где
 , , 
Для того чтобы дополнить систему основных уравнений, присоединим к ней уравнения движения в виде
 , (1.1.15) , (1.1.15)
где (F1 , F2 ,F3) обозначает массовую силу в точке (х1, х2 , х3) и — i-й компонент ускорения д2и/дt2 бес конечно малого элемента, сосредоточенного около этой точки.
Система шестнадцати уравнений (1.1.2), (1.1.6), (1.1.14) и (1.1.15) вместе с соответствующими граничными условиями достаточна для определения изменения температуры и компонентой напряжений и перемещения в случае» когда источники тепла и массовые силы заданы.
Безразмерная форма уравнений. Основные уравнения термоупругости удобно записать в безразмерной форме. Если характерный линейный размер  принять в качестве единицы длины» время τ в качестве единицы времени, температуру начала отсчета T за единицу измерения температуры и модуль сдвига μ принять в качестве единицы измерения, напряжения то в результате найдем, что уравнения (1.1.6), (1.1.14) и (1.1.15) примут соответственно следующую безразмерную форму: принять в качестве единицы длины» время τ в качестве единицы времени, температуру начала отсчета T за единицу измерения температуры и модуль сдвига μ принять в качестве единицы измерения, напряжения то в результате найдем, что уравнения (1.1.6), (1.1.14) и (1.1.15) примут соответственно следующую безразмерную форму:
 , (1.1.16) , (1.1.16)
 (1.1.17) (1.1.17)
 где где
 , , 
обозначают новые функции и
 , ,  , ,  , ,  . .
При определении а величина  была заменена скоростью с2 распространения S-волн в теле. Величинa была заменена скоростью с2 распространения S-волн в теле. Величинa представляет квадрат отношения скорости Р – волн к скорости S – воли. В зависимости от коэффициента Пуассона величину β можно записать в виде представляет квадрат отношения скорости Р – волн к скорости S – воли. В зависимости от коэффициента Пуассона величину β можно записать в виде  . .
Задачи об установившихся состояниях. Если массовые силы и источники тепла не зависят отвременииесли поверхностные нагрузки являются статическими нагрузками, то тогда основная система уравнений (1.1.16), (1.1.14) и (1.1.15) примет вид
 (1.1.19) (1.1.19)
 , (1.1.20) , (1.1.20)
 (1.1.21) (1.1.21)
Подставив в уравнение (1.1.19) модуль Юнга Е и коэффициент Пуассона υ, получим следующее уравнение:
 (1.1.22) (1.1.22)
Для упругого тела, свободного от массовых сил, полагая Fi = 0 и используя формулу

найдем, подставляя соотношение (1.1.22) в уравнение (1.1.21):
 (1.1.23) (1.1.23)
Для того чтобы решить это уравнение, Гудьер вводит термоупругий потенциал φ, с помощью которого вектор перемещения u1, u2, и3 определяется в виде
 (1.1.24) (1.1.24)
Подставляя выражение (1.1.24) в уравнение (1.1.23), получаем условие, накладываемое на φ:

Таким образом, если выбрать φ так, что
 , (1.1.25) , (1.1.25)
где

то вектор перемещения, определяемый уравнением (1.1.24), является решением уравнений, описывающих установившийся процесс термоупругости.Уравнение (1.1.25) в точности соответствует уравнению Пуассона и хорошо известно, что частный интеграл этого уравнения имеет вид
 (1.1.26) (1.1.26)
где интегрирование распространяется на все тело.
Напряженное и деформированное состояния, представляемые частным интегралом (1.1.26), требуют не только заданного распределения температуры, но также и определенных поверхностных нагрузок, которые могут быть вычислены посредством выражения (1.1.22) и условии равновесия на границе. Для полного решения задачи требуется лишь определить распределение дополнительных напряжениий, обусловленных равными и прямо противоположными нагрузками на границе, что представляет собой задачу теории упругости при заданных нагрузках на границе. Тот факт, что тело нагрето, не играет роли до тех пор, пока упругие постоянные остаются неизменными. Интегралы типа (1.1.26) были использованы Борхардтом при общем анализе теории термоупругости и при решении некоторых частных задач в случае несимметричных распределений температуры в теле со сферическими или цилиндрическими границами. Распределение напряжений, обусловленное специальным распределением температуры в бесконечном и полубесконечном телах, обсуждалось различными авторами. Имеется очень мало точных решений даже этих уравнений, описывающих установившееся состояние, а те, которые имеются, относятся к сферам и цилиндрам, однако в главе 14 книги Тимошенко и Гудиера «TheoryofElasticity» (NewYork, 1951) рассматривается несколько приближенных решений инженерных задач, касающихся термических напряжений в пластинах и стержнях
1.2 Построение задачи термоупругости
В общем случае постановка задачи термоупругости заключается в следующем. Необходимо при заданных механических и тепловых воздействиях определить 16 функций координат хR и времени t: шесть компонентов тензора напряжения  шесть компонентов тензора деформации ε - три компонента вектора перемещения шесть компонентов тензора деформации ε - три компонента вектора перемещения  и температуру Т, удовлетворяющих: трем уравнениям движения (1.2.1); шести соотношениям между напряжениями и деформациями (1.2.2) или (1.2.3); шести соотношениям между деформациями и перемещениями (1.2.4); уравнению теплопроводности (1.2.5), при определенных начальных и граничных условиях. и температуру Т, удовлетворяющих: трем уравнениям движения (1.2.1); шести соотношениям между напряжениями и деформациями (1.2.2) или (1.2.3); шести соотношениям между деформациями и перемещениями (1.2.4); уравнению теплопроводности (1.2.5), при определенных начальных и граничных условиях.
 (1.2.1) (1.2.1)
ρ – плотность,
 – силы инерции. – силы инерции.
 (1.2.2) (1.2.2)
где λ и μ – коэффициенты Ляме при изотермической деформации.
 (1.2.3) (1.2.3)
Е – изотермический модуль упругости;
 - коэффициент Пуассона. - коэффициент Пуассона.
 (1.2.4) (1.2.4)
где  – вектор перемещения. – вектор перемещения.
 (1.2.5) (1.2.5)
S – плотность энергии;
 –коэффициент теплопроводности; –коэффициент теплопроводности;
 – удельная мощность (количество тепла, произведенного за единицу времени в единицу объема) источников тепла. – удельная мощность (количество тепла, произведенного за единицу времени в единицу объема) источников тепла.
Начальные условия обычно задаются в виде распределений компонентов вектора перемещения , их скоростей  и температуры Т во всей области V упругого тела: и температуры Т во всей области V упругого тела:
 , ,  , ,  при t = 0. (1.2.6) при t = 0. (1.2.6)
Здесь и дальше обозначения gi(xR), hi(xR), f(xR) означают функции всех координат хR (R — 1, 2, 3) в рассматриваемой области.
Граничные условия на поверхности Ω упругого тела, ограничивающей его объем V, складываются из механических и тепловых условий.
Механические граничные условия задаются либо в перемещениях
 приt >0, (1.2.7) приt >0, (1.2.7)
либо в напряжениях
 при t >0, (1.2.8) при t >0, (1.2.8)
 — компоненты вектора поверхностной силы; — компоненты вектора поверхностной силы;
пj — компоненты единичного вектора внешней нормали к поверхности Ω.
В качестве теплового граничного условия применяется одно из граничных условий теории теплопроводности. Механические и тепловые граничные условия могут быть также смешанными. На одной части поверхности механические граничные условия могут быть заданы в перемещениях (1.2.7), а на другой — в напряжениях (1.2.8). Тепловое граничное условие на одной части поверхности тела задается, например, температурой, а на другой — законом конвективного теплообмена с окружающей средой.
Система уравнений (1.2.1), (1.2.2) или (1.2.3), (1.2.4) и (1.2.5) при указанных начальных граничных условиях описывает связанную нелинейную задачу термоупругости.
При  << I значения упругих и термических коэффициентов и удельных теплоемкостей предполагаются постоянными, вместо уравнения (1.2.5) применяется уравнение теплопроводности (1.2.9), и связанная задача термоупругости становится линейной. << I значения упругих и термических коэффициентов и удельных теплоемкостей предполагаются постоянными, вместо уравнения (1.2.5) применяется уравнение теплопроводности (1.2.9), и связанная задача термоупругости становится линейной.
 (1.2.9) (1.2.9)
Доказано, что для области V, свободной от объемных сил и источников тепла, решение системы уравнений (1.2.1), (1.2.2), (1.2.3), (1.2.5) при начальных и граничных условиях, заданных через перемещения и температуру, является единственным. Это доказательство можно обобщить и на другие механические и тепловые воздействия и граничные условия.
Составим для этой задачи уравнения движения в перемещениях. Выражая в уравнениях (1.2.1) напряжения через деформации по формуле (1.2.2) и учитывая, что члены, содержащие εRR и T, сохраняются только при i — j, получаем
 . (1.2.10) . (1.2.10)
В этом уравнении деформации заменяем перемещениями. Заменяя jнемым индексом Rи учитывая, что  , находим , находим
 (1.2.11) (1.2.11)
Уравнения (1.2.11) совместно с уравнением (1.2.9) при определенных начальных и граничных условиях описывают изменение в пространстве и во времени поля деформации и температурного поля. Представим эти уравнения в векторной форме:
 graddiv graddiv grad grad (1.2.12) (1.2.12)
 div div (1.2.13) (1.2.13)
где  коэффициент температуропроводности. коэффициент температуропроводности.
1.3 Виды задач:
связанная и несвязанная
Термоупругая деформация тела, возникающая от нестационарных механических и тепловых воздействий, сопровождается обратным эффектом — изменением его температурного поля. Задача термоупругости, в которой учитывается указанный эффект, называется связанной динамической задачей термоупругости, или связанной задачей термоупругости.
Эффекты связанности. Законы термодинамики гласят, что изменение деформаций упругого тела сопровождается изменением его температуры, при котором возникает теплопоток, обусловливающий увеличение энтропии термодинамической системы и, следовательно, термоупругое рассеяние энергии.
В металлических телах эффект связанности поля деформации и температурного поля обычно мало влияет на термическое возмущение и распределение тепловых напряжений. Но это не значит, что подобное положение сохранится и для новых материалов, обладающих большим параметром связанности.
При учете эффекта связанности устанавливаются новые качественные особенности распространения упругих волн, которые под влиянием тепловых эффектов распространяются с затуханием и дисперсией. В частности, существенно различаются решение динамической задачи термоупругости о тепловом ударе на поверхности полупространства без учета связи полей деформации и температуры и решение с учетом этой связи; в случае «несвязанного» решения разрыв напряжения αх остается неизменным, тогда как при «связанном» он с течением времени быстро уменьшается.
В работе, связанная задача термоупругости рассматривается при малом термическом возмущении, т. е. при  << 1 << 1
В этом случае связанная задача становится линейной и при формулировке ее в перемещениях сводится к решению системы уравнений (1.2.12) и (1.2.13). Представления общих решений этой системы обобщают представления общих решений уравнения (1.3.30), описывающего динамическую задачу термоупругости. Известные представления решения уравнений классической теории упругости Б. Г. Галеркина и П. Ф. Папковича обобщаются на случай связанной задачи термоупругости. Применение прямых методов для решения связанных задач термоупругости в общем случае встречает большие математические затруднения; перспективной является разработка приближенных методов решения связанных задач термоупругости на основе вариационных принципов, аналогичных таковым для статических и квазистатических задач термоупругости.
Представления общего решения. Связанная задача термоупругости при малом термическом возмущении описывается системой уравнений (1.2.12) и (1.2.13) при начальных и граничных условиях.
При объемной силе
 = grad П + rot = grad П + rot (1.3.1) (1.3.1)
известно следующее представление общего решения уравнений (1.2.12) и (1.2.13):
и =grad + rot + rot (1.3.2) (1.3.2)
 □ □ , ,
в котором скалярная Ф и векторная  функции удовлетворяют уравнениям функции удовлетворяют уравнениям
□  □ □ ; ( 1.3.3) ; ( 1.3.3)
□  (1.3.4) где (1.3.4) где
□ = = □ □ = = (n= 1,2);(1.3.5) (n= 1,2);(1.3.5)
ε — параметр связанности, имеющий значение;
с1 и с2 — скорость распространения упругой волны соответственно расширения и искажения (см. выражения (1.3.6)). При ε = 0 и П = 0 уравнение (1.3.3) на основании уравнения (1.3.31) переходит в (1.3.7)
 , ,  (1.3.6) (1.3.6)
□  (1.3.7) (1.3.7)
а при  = 0 уравнение (1.3.4) переходит в уравнение (1.3.8) динамической задачи термоупругости. = 0 уравнение (1.3.4) переходит в уравнение (1.3.8) динамической задачи термоупругости.
□ (1.3.8) (1.3.8)
Найдено также обобщение известного представления решения уравнений классической теории упругости Б. Г. Галеркина [52] (на случай связанной задачи термоупругости):
 = grad + = grad +  □ □  - graddiv(1.3.9) - graddiv(1.3.9)
 □ □
где функция и удовлетворяют уравнениям
□ □ □ □ □ div div (1.3.10) (1.3.10)
□□ (1.3.11) (1.3.11)
Как и в динамической задаче термоупругости, представление (1.3.9) при отсутствии объемных сил можно преобразовать к представлению (1.3.2). Действительно, если в представление (1.3.9) и уравнение (1.3.10) внести выражения
    , ,
  div div (1.3.12) (1.3.12)
в которых  — частное решение неоднородного уравнения (1.3.11), — частное решение неоднородного уравнения (1.3.11),  и - решения уравнений и - решения уравнений
□ , □ , □ (1.3.13) (1.3.13)
Ф'— новая скалярная функция, то форма их не изменится, но вместо Ф и в представлении (1.3.9) возникают Ф' и   , а в уравнении (1.3.10) Ф' и , а в уравнении (1.3.10) Ф' и  . На основании второго уравнения (1.3.13) и тождества . На основании второго уравнения (1.3.13) и тождества
graddiv= + rotrot + rotrot
при подстановке — rot такое представления при = 0, П = 0, X = 0 (отсутствие объемных сил) переходит в представление (1.3.2). такое представления при = 0, П = 0, X = 0 (отсутствие объемных сил) переходит в представление (1.3.2).
Вводя в представление (1.3.9) и в уравнения (1.3.10) и (1.3.11) новые функции
 div div , ,  □ □ (1.3.14) (1.3.14)
где r— радиус-вектор, получаем обобщение известного представления П. Ф Папковича на случай связанной задачи термоупругости (1.3.14)
 grad grad grad grad ; (1.3.15) ; (1.3.15)
 □, □,
в котором функция Ф,  , В0 удовлетворяют уравнениям , В0 удовлетворяют уравнениям
□□ □ □ (1.3.16) (1.3.16)
□ , ,  □ □ (1.3.17) (1.3.17)
В случае распространения безвихревой волны (волны расширения) и отсутствия объемных сил и источников тепла представление (1.3.2) имеет вид представление (1.3.2) имеет вид
grad,  □, (1.3.18) □, (1.3.18)
где функция удовлетворяет уравнению
﴾□□ ﴿ = 0 (1.3.19) ﴿ = 0 (1.3.19)
Решение для функции Ф ищют в виде
= φ(x, y, z)e (1.3.20) (1.3.20)
где р — комплексная постоянная. Подставляя это решение в (1.3.19), для φ получают уравнение
 =0. (1.3.21) =0. (1.3.21)
которое может быть представлено в виде
 , (1.3.22)(9.3.19) , (1.3.22)(9.3.19)
Где
 ; (1.3.23) ; (1.3.23)

Если предположить, что термоупругая связь отсутствует (ε = 0), то из уравнения (1.3.23) получают
 ; ;  . (1.3.24) . (1.3.24)
Следовательно, уравнение (1.3.23) описывает распространение двух видов волн расширения, из которых один, связанный с , близок к чисто упругой волне, а другой, связанный с , близок к чисто упругой волне, а другой, связанный с , сходен по своему характеру с чисто тепловой волной. , сходен по своему характеру с чисто тепловой волной.
На основании уравнений (1.3.20) и (1.3.21) общее решение уравнения (1.3.19) можно представить в виде
 (1.3.25) (1.3.25)
где  удовлетворяет уравнению удовлетворяет уравнению
 j=1,2. (1.3.26) j=1,2. (1.3.26)
Таким образом, в рассматриваемом случае общее решение связанной термоупругой задачи на основании представления (1.3.18) и решения (1.3.25) принимает вид
 grad grad (1.3.27) (1.3.27)
 (1.3.28) (1.3.28)
Учитывая, что
 div div
и принимая во внимание формулу (1.328), получаем на основании соотношения (1.2.2) следующие выражения для напряжений:
 (1.3.29) (1.3.29)
 — символ Кронекера; — символ Кронекера;
ρ — плотность среды, в которой распространяется волна (1.3.26)
Задача термоупругости, описываемая двумя уравнениями:
 grad div grad div  grad (Т — Т0) — grad (Т — Т0) —  0 , (1.3.30) 0 , (1.3.30)
 (1.3.31) (1.3.31)
называется несвязанной динамической задачей термоупругости, или просто динамической задачей термоупругости.
При существенном приращении температуры Т—Т0 коэффициенты  в соотношениях (1.2.2) являются функциями Т, а следовательно, и функциями координат хR и времени t. Помня об этом и выполняя преобразования, аналогичные проведенным в п. 1.3, находим для такой задачи следующие уравнения движения в перемещениях: в соотношениях (1.2.2) являются функциями Т, а следовательно, и функциями координат хR и времени t. Помня об этом и выполняя преобразования, аналогичные проведенным в п. 1.3, находим для такой задачи следующие уравнения движения в перемещениях:

 . (1.3.32) . (1.3.32)
Вместо этих трех скалярных уравнений можно записать одно векторное в виде
 grad div grad div + 2 grad μ·Пε grad λ div + 2 grad μ·Пε grad λ div - -
 (1.3.33) (1.3.33)
где gradμ · Пε — скалярное произведение тензора деформации Пε на вектор gradμ.
Если учесть зависимость  от температуры, то уравнение тепло проводности становится нелинейным. от температуры, то уравнение тепло проводности становится нелинейным.
2 Модель термоупругой среды
2.1 Понятие модели сплошной среды: простые и сложные
Дифференциальные уравнения и соотношения, выражающие законы сохранения массы, импульса, энергии и второй закон термодинамики нужны для общего случая независимо от того, какими конкретными физико-механическими свойствами обладает деформируемая среда, и в силу этого имеют универсальный характер, т.е. справедливы для любых сред. Однако при попытке математического описания движения какой-либо конкретной деформируемой среды (газообразной, жидкой или твердой) довольно легко установить, что имеющихся в распоряжении универсальных дифференциальных уравнений и соотношений не достаточно для составления замкнутой системы уравнений, которая могла бы послужить основой для последующего нахождения единственного решения и получения количественной информации о характере движения и изменения состояния деформируемой среды. При этом очевидна закономерность: количество входящих в составляемую систему уравнений неизвестных величин (характеристических функций) на 6 единиц больше имеющихся в распоряжении уравнений, где 6 — количество независимых компонент симметричных тензоров напряжений и деформаций. Например, приведенная ниже система уравнений адиабатического движения деформируемой среды включает 20 уравнений (одно уравнение неразрывности (2.1.1), три уравнения движения (2.1.2), одно уравнение энергии (2.1.3), три кинематических соотношения взаимосвязи компонент скорости и перемещения (2.1.4), шесть геометрических соотношений (2.1.5) и шесть кинематических соотношений (2.1.6) и 26 неизвестных характеристических функций (плотность, удельная внутренняя энергия, по три компоненты векторов перемещения и скорости, по шесть независимых компонент симметричных тензоров напряжений, деформаций и скоростей деформаций) [53]:
 div υ=0, (2.1.1) div υ=0, (2.1.1)
 , (2.1.2) , (2.1.2)
 , (2.1.3) , (2.1.3)
 , (2.1.4) , (2.1.4)
 , (2.1.5) , (2.1.5)
 , (2.1.6) , (2.1.6)
Анализ приведенной системы уравнений показывает, что в ней отсутствуют соотношения, учитывающие реакцию деформируемой среды на процесс деформирования и показывающие, какие внутренние напряжения возникают в ней в ответ на деформации. Подобные соотношения в самом общем виде можно записать как
 (2.1.7) (2.1.7)
Соотношения вида (2.1.7) называются физическими соотношениями, они определяют специфику той или иной деформируемой среды в отношении оказания сопротивления деформированию и тесно связаны с понятием модели сплошной среды.
Модель сплошной среды — это некоторое идеализированное представление реальной деформируемой среды, учитывающее основные ее свойства сопротивления деформированию и подчиняющееся определенному математическому описанию в виде физических соотношений (2.1.7). Выбор модели сплошной среды для реальной деформируемой среды и соответствующий выбор физических соотношений (2.1.7) позволяет составить замкнутую систему дифференциальных (2.1.1)—(2.1.6) и конечных функциональных (2.1.7) уравнений для математического описания движения и внутреннего состояния исследуемой среды.
Под простыми моделями сплошных сред понимаются идеализированные представления реальных деформируемых сред, учитывающие какое-либо одно из основных механических свойств. К числу простых относятся следующие четыре модели: модель идеальной среды (идеальная жидкость или идеальный газ, не способные оказывать сопротивление формоизменению); модель вязкой жидкости (учитывается лишь свойство вязкости); модель упругой среды (принимается во внимание лишь проявление свойства упругости); модель жесткопластической среды (проявляется только свойство пластичности). Рассмотрим перечисленные выше простые модели сплошных сред, придерживаясь следующей последовательности: определение модели, общие соображения относительно сопротивления деформированию данной среды, определяющие уравнения, физические соотношения, примеры использования данной модели при физико-математическом моделировании и ее термодинамические особенности. Упругая (идеально, или совершенно, упругая) среда — это изотропная сплошная среда, сдвиговое и объемное сопротивления которой линейно зависят от деформаций. В качестве определяющих уравнений для модели упругой среды выступают уравнения, устанавливаемые на основе опытных данных по деформированию твердых тел (металлов и их сплавов, пластмасс и т.п.) при малых деформациях. Этим же обстоятельством определяется область практического использования данной модели сплошной среды.
Так, из экспериментов по всестороннему сжатию твердых тел при малых объемных деформациях устанавливается прямо пропорциональная зависимость среднего напряжения от средней деформации, выражаемая уравнением Бриджмена (2.1.8) и определяющая физическое поведение упругой среды.
 (2.1.8) (2.1.8)
В более общем случае, с учетом влияния температуры, физическое поведение упругой среды описывается уравнением Дюамеля — Неймана:
 (2.1.9) (2.1.9)
К — модуль объемного сжатия;
 — коэффициент линейного теплового расширения материала; — коэффициент линейного теплового расширения материала;
Т и  — соответственно текущая и начальная температуры материала. — соответственно текущая и начальная температуры материала.
Уравнение Дюамеля — Неймана может быть представлено в более "прозрачном" для понимания виде:  , показывающем, что вклад в объемную деформацию , показывающем, что вклад в объемную деформацию  при деформировании индивидуальных частиц упругой среды вносят всестороннее сжатие или растяжение и нагрев, при этом влияние фактора нагрева проявляется в зависимости от коэффициента объемного теплового расширения при деформировании индивидуальных частиц упругой среды вносят всестороннее сжатие или растяжение и нагрев, при этом влияние фактора нагрева проявляется в зависимости от коэффициента объемного теплового расширения  . .
Вто же время из экспериментов по кручению тонкостенных металлических труб, в индивидуальных частицах среды реализуется напряженно-деформированное состояние чистого сдвига, устанавливается прямо пропорциональная зависимость касательных напряжений от сдвиговых деформаций, приводящая к выводу о существовании следующей взаимосвязи между девиаторами напряжений деформаций:
 (2.1.10) (2.1.10)
где G – модуль упругости второго рода (модуль сдвига).
Уравнение (3.21) принимается в качестве определяющего механическое поведение упругой среды. Из уравнения (3.21) следует скалярное определяющее уравнение — прямо пропорциональная зависимость интенсивности напряжений от интенсивности деформаций:

Из определяющих уравнений (3.12)(или (3.20)) и (3.21) следуют физические соотношения для моделей упругой среды,принимающие форму обобщенного закона Гука. Компоненты девиатора напряжений (см. (3.21)) могут быть выражены через компоненты девиатора деформаций как  . Отсюда в случае выражения среднего напряжения σ через среднюю деформацию ε из уравнения Бриджмена (3.12) следуют прямые физические соотношения в виде зависимостей компонент тензора напряжений от компонент тензора деформаций: . Отсюда в случае выражения среднего напряжения σ через среднюю деформацию ε из уравнения Бриджмена (3.12) следуют прямые физические соотношения в виде зависимостей компонент тензора напряжений от компонент тензора деформаций:
 (2.1.11) (2.1.11)
Обратные физические соотношения (зависимости компонент тензора деформаций от компонент тензора напряжений) получаются аналогичным образам и имеют вид
 (2.1.12) (2.1.12)
Обобщенный закон Гука описывает все частные проявления упругого поведения деформируемых сред, реализующиеся в простых случаях напряженно-деформированного состояния. Так, для деформированного состояния чистого сдвига (ε12 0,ε11 = ε22 = ε33 = ε13 = ε23 =0) согласно (2.1.12) реализуется напряженное состояние σ12 = 2Gε12,σ11 = σ22 = σ33 = σ13 = σ23 =0 с прямо пропорциональной зависимостью касательных напряжений от сдвиговых деформаций. Деформированному состоянию всестороннего равноосного растяжения или сжатия ε11 = ε22 = ε33 = ε 0, εij = 0 при ij) соответствует такое же напряженное состояние: σ11 = σ22 = σ33 = σ = 3Kε, σ12 = σ13 = σ23 =0.Напряженному состоянию одноосного растяжения (σ11 0, σ22 = σ33 = σ12 = σ13 = σ23 = 0, σ = σ11/3 отвечает трехосное деформированное состояние: εij = 0 при ij и 0,ε11 = ε22 = ε33 = ε13 = ε23 =0) согласно (2.1.12) реализуется напряженное состояние σ12 = 2Gε12,σ11 = σ22 = σ33 = σ13 = σ23 =0 с прямо пропорциональной зависимостью касательных напряжений от сдвиговых деформаций. Деформированному состоянию всестороннего равноосного растяжения или сжатия ε11 = ε22 = ε33 = ε 0, εij = 0 при ij) соответствует такое же напряженное состояние: σ11 = σ22 = σ33 = σ = 3Kε, σ12 = σ13 = σ23 =0.Напряженному состоянию одноосного растяжения (σ11 0, σ22 = σ33 = σ12 = σ13 = σ23 = 0, σ = σ11/3 отвечает трехосное деформированное состояние: εij = 0 при ij и
 (2.1.13) (2.1.13)

где Е = 18KG/(6K + 2G) — модуль упругости первого рода (модуль Юнга), av = (ЗК - 2G)/(6K + 2G) — коэффициент Пуассона.
Модуль Юнга Е и коэффициент Пуассона v в дополнение к модулю сдвига G и модулю объемного сжатия К являются еще одной парой упругих характеристик, через которые может быть представлен обобщенный закон Гука. Выражая модуль объемного сжатия и модуль сдвига через модуль Юнга и коэффициент Пуассона как
 , ,  (2.1.14) (2.1.14)
можно получить запись физических соотношений для моделей упругой среды в форме
 ; ;
 . .
Следует отметить, что имеющаяся взаимосвязь между парами упругих характеристик (2.1.14) позволяет ограничиться экспериментальным определением лишь двух из них с последующим расчетом двух других. Наиболее просто определяются из опытов значения модуля Юнга Е (одноосное растяжение образцов) и модуля сдвига G (кручение образцов с реализацией напряженно-деформированного состояния чистого сдвига).
Уравнения (2.1.8), (2.1.10) и (2.1.13) позволяют истолковать физический смысл упругих характеристик G, E, v, К. Как следует из (2.1.10), модуль сдвига G определяет касательные напряжения, возникающие в упругой среде при чистом сдвиге. В соответствии с (2.1.13) модуль Юнга Е определяет продольные деформации, возникающие при одноосном растяжении, а коэффициент Пуассона v — соотношение поперечной и продольной деформаций в этом же случае. Согласно уравнению Бриджмена (2.1.8), модуль объемного сжатия К определяет среднее напряжение в зависимости от объемной деформации в и, напротив, характеризует объемную деформацию, возникающую в частицах упругой среды, когда в них существует давление р = — σ:  = Зε = σ/К. = Зε = σ/К.
Важным частным случаем модели упругой среды является так называемая несжимаемая упругая среда, объем индивидуальных частиц, которой не изменяется при любом уровне давления (или среднего напряжения). Для такой среды  , модуль объемного сжатия К = ∞, а коэффициент Пуассона v = 0,5 в соответствии с (2.1.14). Для реальных же твердых тел, обладающих сжимаемостью и по своим свойствам близких к модели упругой среды, коэффициент Пуассона v = 0,2...0,3. , модуль объемного сжатия К = ∞, а коэффициент Пуассона v = 0,5 в соответствии с (2.1.14). Для реальных же твердых тел, обладающих сжимаемостью и по своим свойствам близких к модели упругой среды, коэффициент Пуассона v = 0,2...0,3.
Термодинамические особенности модели упругой среды определяются тем обстоятельством, что процесс адиабатического деформирования ее частиц является обратимым и в случае снятия нагрузок сопровождается самопроизвольным протеканием в обратном направлении с уменьшением до нуля напряжений и деформаций и возвратом в исходное состояние. Для такой среды отсутствует переход механической работы деформации во внутреннюю тепловую энергию (χ = 0), энтропия индивидуальных частиц может изменяться только за счет теплообмена с окружающими частицами: . Деформирование же упругой среды в адиабатических условиях ( . Деформирование же упругой среды в адиабатических условиях ( ) имеет изоэнтропический характер dS/dt =0. ) имеет изоэнтропический характер dS/dt =0.
Под сложными моделями сплошных сред понимаются модели, в которых учитываются два и более основных механических свойства. К числу таких моделей относятся, например, упругопластическая, вязкоупругая, вязкопластическая, упруговязкопластическая среды. В этом разделе рассматривается одна из сложных моделей — модель упругопластической среды, наиболее широко используемая при математическом моделировании процессов деформирования твердых тел. Модель упругопластической среды соответствует твердым телам (главным образом, металлам и их сплавам), которые при нагружении работают упруго, пока не выполняется некоторое предельное условие, называемое условием пластичности, а при дальнейшем нагружении такой среды в ней развиваются не только упругие, но и пластические деформации.
Для реальных упругопластических сред характерны диаграммы механического поведения (диаграммы деформирования)  подобные диаграмме, приведенной на рис. 1, в для мягкой стали (типа стали 10). В ряде случаев диаграммы деформирования реальных металлов могут несколько отличаться от показанной на рис. 1,в в сторону усложнения (например, включать участок нелинейной упругости) или в сторону упрощения (например, для некоторых металлов отсутствует площадка текучести и после упругого участка сразу происходит переход к участку упрочнения) и включать дополнительные характерные точки: в первом случае такой точкой является предел упругости, больший предела пропорциональности, а во втором — условный предел текучести, соответствующий заданному уровню остаточной пластической деформации. Однако при построении модели упругопластической среды, как правило, пренебрегают такими тонкими особенностями и рассматривают идеализированные диаграммы механического поведения, подобные показанным на рис.1. Наиболее часто в качестве таких идеализированных диаграмм механического поведения рассматриваются диаграммы для идеальной упруго-пластической среды, для которой пределы пропорциональности, упругости, текучести и прочности ассоциируются с одним и тем же значением подобные диаграмме, приведенной на рис. 1, в для мягкой стали (типа стали 10). В ряде случаев диаграммы деформирования реальных металлов могут несколько отличаться от показанной на рис. 1,в в сторону усложнения (например, включать участок нелинейной упругости) или в сторону упрощения (например, для некоторых металлов отсутствует площадка текучести и после упругого участка сразу происходит переход к участку упрочнения) и включать дополнительные характерные точки: в первом случае такой точкой является предел упругости, больший предела пропорциональности, а во втором — условный предел текучести, соответствующий заданному уровню остаточной пластической деформации. Однако при построении модели упругопластической среды, как правило, пренебрегают такими тонкими особенностями и рассматривают идеализированные диаграммы механического поведения, подобные показанным на рис.1. Наиболее часто в качестве таких идеализированных диаграмм механического поведения рассматриваются диаграммы для идеальной упруго-пластической среды, для которой пределы пропорциональности, упругости, текучести и прочности ассоциируются с одним и тем же значением  (рис.1,а) и для упругопластической среды с линейным (рис.1,б) или нелинейным (рис. 1, в) упрочнением. (рис.1,а) и для упругопластической среды с линейным (рис.1,б) или нелинейным (рис. 1, в) упрочнением.
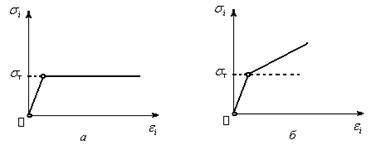

Рисунок 1
Возможными вариантами упрощенных диаграмм механического поведения являются диаграммы идеальной жесткопластической среды (рис.1,г) или жесткопластической среды с упрочнением (рис. 1, д), причем для двух последних случаев характерно отсутствие упругого участка (упругими деформациями по сравнению с пластическими пренебрегают).
Модель упругопластической среды является сложной не только по формальному признаку (принимаются во внимание свойства упругости и пластичности), но и с точки зрения уровня сложности математического описания. Отметим, что в случае малых деформаций (превышающих упругие, но соизмеримых с ними) модель упругопластической среды хорошо описывается деформационной теорией пластичности (теория малых упругопластических деформаций). При больших (конечных) деформациях для описания поведения упругопластических сред более предпочтительна теория пластического течения.
2.2 Постановка задач в механики сплошных сред
Прикладное значение механики сплошных сред заключается в том, что она создает фундамент для физико-математического моделирования процессов взаимодействия деформируемых тел и сред. С помощью формулируемых в механике сплошных сред уравнений и соотношений удается составить замкнутую систему уравнений, решение которых позволяет исследовать поведение деформируемых сред и получать информацию о параметрах их движения и состояния. В настоящее время именно физико-математическое моделирование с позиций механики сплошных сред является наиболее мощным инструментом расчетно-теоретического исследования функционирования различных технических объектов, как существующих, так и проектируемых. В качестве примеров прикладных задач, необходимость решения которых возникает при изучении функционирования газодинамических импульсных устройств, можно указать задачи обтекания тел вращения воздушным потоком (рис. 2, а), проникания тел вращения в плотные и прочные среды (рис. 2, б, в), метания металлических облицовок продуктами детонации взрывчатого вещества (рис. 2, г), схлопывания конических металлических облицовок под действием приложенного давления с формированием кумулятивной струи (рис. 2, д) и т.п.
Однако решению задачи обязательно предшествует весьма важный этап формализации рассматриваемого физического процесса: его описание в виде соответствующей системы

Рисунок 2
уравнений, соотношений и определенных условий, т.е. решению задачи предшествует так называемая постановка задачи или же формулировка физико-математической модели изучаемого процесса взаимодействия деформируемых тел или сред. Далее приведем общие принципы постановки задач механики сплошных сред с различными физико-механическими свойствами и последовательно проанализируем особенности постановки задач механики идеальной и вязкой жидкостей, упругой и упругопластической сред. При этом основное внимание уделим этапам составления замкнутой системы исходных уравнений, получению системы разрешающих уравнений и различных частных ее видов, особенностям задания граничных условий. Постановку задачи механики упругопластической среды рассмотрим в полном объеме на примере процесса проникания металлического тела в металлическую преграду.
Постановка задачи механики сплошных сред заключается в составлении такой замкнутой системы уравнений и соотношений, которая бы описывала движения и состояние деформируемых сред с учетом их физико–механических свойств, действия внешних сил, тепловых и других факторов и позволяла определять зависимости характеризующих движение и состояние физических величин от координат и времени  и т.п. и т.п.
Постановка любой задачи механики сплошных сред включает следующие пять этапов:
— выбор системы отсчета и системы координат, по отношению к которым будет описываться движение материального континуума;
— выбор моделей сплошных сред для участвующих в исследуемом процессе реальных деформируемых сред;
— составление системы исходных уравнений для выбранных моделей и исследуемого процесса;
— выбор основных неизвестных характеристических функций и переход к так называемой системе разрешающих уравнений;
— формулировка начальных и граничных условий для решаемой задачи.
2.2.1 Выбор системы отсчета и системы координат. В большинстве случаев при постановке прикладных задач выбираются инерциальные системы отсчета, неподвижные относительно земной поверхности. Как известно, выбор такой системы отсчета позволяет использовать при математическом описании движения законы механики Ньютона, в частности уравнение движения (2.1.2), являющееся выражением второго закона Ньютона применительно к сплошным деформируемым средам. Например, для показанного (на рис. 2, б) случая проникания тела вращения в плотную среду в качестве точки отсчета удобно принять неподвижную относительно Земли точку 0 начала взаимодействия проникающего тела с плотной средой. В некоторых более редких случаях допустимо и более удобно использование неинерциальных систем отсчета. Например, при решении задачи расчета характеристик напряженно-деформированного состояния проникающего тела — оболочки вращения — и оценке его прочности удобнее связать систему отсчета с самим тормозящимся в процессе проникания телом. Однако в этом случае в соответствии с принципом Даламбера следует включить в число внешних сил объемные силы инерции, для чего необходимо предварительное определение ускорения проникающего тела.
Выбор конкретного вида системы координат  произволен и определяется, прежде всего, соображениями удобства и простоты математического описания движения. Так, при решении задачи пространственного обтекания тела воздушной средой (см. рис. 2, а) все параметры движения и состояния газа зависят от трех координат и времени (трехмерная нестационарная задача). В этом случае целесообразно выбрать наиболее простую систему координат — декартову прямоугольную систему координат (х1 = х, х2 = у, х3 = z). При проникании тела вращения в преграду по нормали к ней (см. рис. 2, б) очевидна осевая симметрия движения, в этом случае наиболее целесообразен выбор цилиндрической системы координат (х1 = r, х2 = произволен и определяется, прежде всего, соображениями удобства и простоты математического описания движения. Так, при решении задачи пространственного обтекания тела воздушной средой (см. рис. 2, а) все параметры движения и состояния газа зависят от трех координат и времени (трехмерная нестационарная задача). В этом случае целесообразно выбрать наиболее простую систему координат — декартову прямоугольную систему координат (х1 = х, х2 = у, х3 = z). При проникании тела вращения в преграду по нормали к ней (см. рис. 2, б) очевидна осевая симметрия движения, в этом случае наиболее целесообразен выбор цилиндрической системы координат (х1 = r, х2 = , х3 = z), в которой вектор скорости движения частиц имеет лишь две отличные от нуля компоненты υT и υZ а также отсутствует зависимость параметров движения и состояния деформируемой среды от угловой координаты (двумерная осесимметричная нестационарная задача). В еще более геометрически простом случае взрыва сферического заряда, инициируемого в центре, движение обладает точечной симметрией, поэтому наиболее удобно принять для описания движения сферическую систему координат (х1 = r, х2 =, х3 = φ), которая обеспечивает зависимость параметров движения и состояния среды лишь от одной радиальной координаты rи времени t (одномерная нестационарная задача с центральной симметрией). , х3 = z), в которой вектор скорости движения частиц имеет лишь две отличные от нуля компоненты υT и υZ а также отсутствует зависимость параметров движения и состояния деформируемой среды от угловой координаты (двумерная осесимметричная нестационарная задача). В еще более геометрически простом случае взрыва сферического заряда, инициируемого в центре, движение обладает точечной симметрией, поэтому наиболее удобно принять для описания движения сферическую систему координат (х1 = r, х2 =, х3 = φ), которая обеспечивает зависимость параметров движения и состояния среды лишь от одной радиальной координаты rи времени t (одномерная нестационарная задача с центральной симметрией).
2.2.2 Выбор модели сплошной среды и составление системы исходных уравнений. Выбор модели сплошной среды для участвующей в исследуемом процессе реальной деформируемой среды базируется на анализе особенностей поведения этой среды в отношении сопротивления деформированию, на выделении основных факторов и игнорировании второстепенных. Этап выбора модели заканчивается определением конкретного вида физических соотношений (2.1.7), ближе всего соответствующих особенностям физико-механического поведения реальной деформируемой среды.
Например, при решении прикладной задачи проникания тела вращения в воду с относительно небольшой начальной скоростью взаимодействия  100 м/с в качестве модели реальной деформируемой среды (воды) вполне допустимо принять модель идеальной жидкости. Действительно, реальные жидкости обладают свойством сжимаемости и вязкости и в то же время не оказывают сопротивления непосредственно изменению формы своих частиц. При малых скоростях деформации, соответствующих малым скоростям взаимодействия, можно также пренебречь влиянием вязкости и вообще не учитывать появление касательных напряжений, используя для описания физико-механического поведения физические соотношения 100 м/с в качестве модели реальной деформируемой среды (воды) вполне допустимо принять модель идеальной жидкости. Действительно, реальные жидкости обладают свойством сжимаемости и вязкости и в то же время не оказывают сопротивления непосредственно изменению формы своих частиц. При малых скоростях деформации, соответствующих малым скоростям взаимодействия, можно также пренебречь влиянием вязкости и вообще не учитывать появление касательных напряжений, используя для описания физико-механического поведения физические соотношения  , присущие модели идеальной среды. , присущие модели идеальной среды.
Следует отметить, что достаточно часто выбор модели сплошной среды применительно к процессам, происходящим в экстремальных условиях (например, к взрывным и ударным), осуществляется итерационным путем, так как заранее трудно предсказать, какие именно физико-механические свойства реальных сред будут определяющими, а какими можно пренебречь. В таких случаях последовательно используют все более сложные модели, а критерием удовлетворительности выбораявляется соответствие получаемых расчетным путем результатов, имеющимся экспериментальным данным.
Система исходных уравнений – это замкнутая система уравнений и соотношений которая полностью описывает движение и состояние деформируемых сред с учетом их физико-механических свойств. В самом общем виде система исходных уравнений имеет следующий вид [53]:
 , (2.2.1) , (2.2.1)
 , (2.2.2) , (2.2.2)
 , (2.2.3) , (2.2.3)
 , (2.2.4) , (2.2.4)
 , (2.2.5) , (2.2.5)
 , (2.2.6) , (2.2.6)
 . (2.2.7) . (2.2.7)
Система исходных уравнений в обязательном порядке включает основные общие для всех сплошных сред дифференциальные уравнения механики, выражающие фундаментальные законы сохранения массы (2.2.1), импульса (2.2.2), энергии (2.2.3), а также общие для всех сред кинематические соотношения (2.2.4) и (2.2.5) и геометрические соотношения (2.2.6). Индивидуальные особенности рассматриваемой деформируемой среды в отношении оказания сопротивления деформированию учитываются физическими соотношениями (2.2.7), обязательно включаемыми в систему исходных уравнений согласно выбранной модели сплошной среды.
В зависимости от конкретного вида физических соотношений (2.2.7) и от характера процесса деформирования среды в систему исходных уравнений для обеспечения ее замкнутости могут быть включены дополнительные уравнения и соотношения. Например, при отсутствии влияния температуры на физико-механическое поведение рассматриваемой среды физические соотношения имеют вид  и для адиабатического процесса и для адиабатического процесса  система уравнений (2.2.1)—(2.2.7) является замкнутой и содержит 26 уравнений и соотношении и такое же количество искомых характеристических функций (см. раздел 2.1). Напротив, в случаях зависимости компонент тензора напряжений от температуры или же при учете теплообмена между частицами сплошной среды и необходимости определения температурного поля в систему исходных уравнений необходимо включать дополнительные соотношения, учитывающие закон теплопроводности Фурье система уравнений (2.2.1)—(2.2.7) является замкнутой и содержит 26 уравнений и соотношении и такое же количество искомых характеристических функций (см. раздел 2.1). Напротив, в случаях зависимости компонент тензора напряжений от температуры или же при учете теплообмена между частицами сплошной среды и необходимости определения температурного поля в систему исходных уравнений необходимо включать дополнительные соотношения, учитывающие закон теплопроводности Фурье  , где λ — коэффициент теплопроводности) и взаимосвязь между удельной внутренней энергией и температурой (Е = Е(ρ,Т)). , где λ — коэффициент теплопроводности) и взаимосвязь между удельной внутренней энергией и температурой (Е = Е(ρ,Т)).
В ряде случаев система исходных уравнений может быть и более узкой, нежели представленная выше система (2.2.1)—(2.2.7). Например, при постановке задачи механики идеальной жидкости, для которой компоненты тензора напряжений не зависят напрямую от компонент тензора деформаций (зависимость напряжений от деформаций имеет косвенный характер через плотность, взаимосвязанную с объемной деформацией, не требуется включения в систему исходных уравнений кинематических соотношений (2.2.4) и геометрических соотношений (2.2.6). Однако в любом случае следует обеспечивать замкнутость системы исходных уравнений с равенством количества уравнений числу неизвестных характеристических функций, описывающих движение и состояние сплошной среды. Это является необходимым условием для последующего нахождения единственного решения задачи.
2.2.3 Начальные и граничные условия. Неотъемлемым и важнейшим элементом постановки любой задачи механики сплошных сред является формулировка начальных и граничных условий. Их значение определяется тем, что та или иная система разрешающих уравнений описывает целый класс движений соответствующей деформируемой среды, и лишь задание отвечающих исследуемому процессу начальных и граничных условий позволяет выделить из этого класса представляющий интерес частный случай, соответствующий решаемой практической задаче.
Начальные условия — это условия, которыми задаются значения искомых характеристических функций в момент начала рассмотрения исследуемого процесса. Количество задаваемых начальных условий определяется количеством основных неизвестных функций, входящих в систему разрешающих уравнений, а также порядком входящей в эту систему высшей производной по времени. Например, адиабатическое движение идеальной жидкости или идеального газа описывается системой шести уравнений с шестью основными неизвестными — тремя компонентами вектора скорости ,давлением ,давлением ,плотностью ,плотностью и удельной внутренней энергией и удельной внутренней энергией  , при этом порядок производных этих физических величин по времени не превышает первый порядок. Соответственно этому в качестве начальных условий должны быть заданы начальные поля этих шести физических величин: при t =0 , при этом порядок производных этих физических величин по времени не превышает первый порядок. Соответственно этому в качестве начальных условий должны быть заданы начальные поля этих шести физических величин: при t =0  , , , , , , . В некоторых случаях (например, в динамической теории упругости) в качестве основных неизвестных в системе разрешающих уравнений используются не компоненты . В некоторых случаях (например, в динамической теории упругости) в качестве основных неизвестных в системе разрешающих уравнений используются не компоненты  вектора скорости, а компоненты вектора скорости, а компоненты вектора перемещения, а уравнение движения содержит производные второго порядка компонент перемещения вектора перемещения, а уравнение движения содержит производные второго порядка компонент перемещения  , что требует задания двух начальных условий для искомой функции , что требует задания двух начальных условий для искомой функции  : при t = 0 : при t = 0
 и и  . .
Более сложным и разнообразным образом при постановке задач механики сплошных сред задаются граничные условия. Граничные условия — это условия, которыми задаются значения искомых функций (или их производных по координатам и времени) на поверхности S области, занимаемой деформируемой средой. Различают граничные условия нескольких типов: кинематические, динамические, смешанные и температурные.
Кинематические граничные условия соответствуют случаю, когда на поверхности S тела (или ее части) задаются перемещения  или скорости или скорости  где где  — координаты точек поверхности S, изменяющиеся в общем случае в зависимости от времени. — координаты точек поверхности S, изменяющиеся в общем случае в зависимости от времени.
Динамические граничные условия (или граничные условия в напряжениях) задаются, когда на поверхности S действуют поверхностные силы р. Как следует из теории напряжений, в этом случае на любой элементарной площадке поверхности с единичным вектором нормали п вектор удельных поверхностных сил рп принудительно задает вектор полного напряжения σп = рn, действующий в сплошной среде в точке на данном участке поверхности, что приводит к взаимосвязи тензора напряжений (σ) в этой точке с поверхностной силой и ориентацией вектора п соответствующего участка поверхности: (σ) · п = рп или  . .
Смешанные граничные условия соответствуют случаю, когда на поверхности S задаются значения и кинематических, динамических величин или устанавливаются взаимосвязи между ними.
Температурные граничные условия подразделяются на несколько групп (родов). Граничные условия первого рода задают на поверхности Sдеформируемой среды определенные значения температуры Т. Граничные условия второго рода задают на границе вектор теплового потока q, что с учетом закона теплопроводности Фурье q = — λ gradT, по существу, накладывает ограничения на характер температурного распределения в окрестности граничной точки  . Граничные условия третьего рода устанавливают зависимость между вектором теплового потока q, направленным к данной среде со стороны окружающей среды, и температурным перепадом между этими средами и т.д. . Граничные условия третьего рода устанавливают зависимость между вектором теплового потока q, направленным к данной среде со стороны окружающей среды, и температурным перепадом между этими средами и т.д.
Следует отметить, что постановка и решение большинства задач физики быстропротекающих процессов, как правило, осуществляются в адиабатическом приближении, поэтому температурные граничные условия используются достаточно редко, в основном в различных сочетаниях применяются кинематические, динамические и смешанные граничные условия. Рассмотрим возможные варианты задания граничных условий на частном примере.
На рис. 3 схематично представлен процесс взаимодействия при проникании деформируемого тела I в деформируемую преграду II. Тело I ограничено поверхностями S1 иS5, а тело II — поверхностями S2, S3, S4, S5. По -
верхность S5 является границей раздела взаимодействующих деформируемых тел. Будем полагать, что движение тела I до начала взаимодействия, а также в его процессе происходит в жидкости, создающей определенное гидростатическое давление 

Рисунок 3
и задающей внешние по отношению к обоим телам поверхностные силы рп = — р п= — рniri, действующие на любой из элементарных площадок поверхностей S1 тела I и S2 преграды II, граничащих с жидкостью. Будем также считать, что поверхность Sз преграды жестко закреплена, а поверхность S4 свободна от действия поверхностных сил (рп = 0). п= — рniri, действующие на любой из элементарных площадок поверхностей S1 тела I и S2 преграды II, граничащих с жидкостью. Будем также считать, что поверхность Sз преграды жестко закреплена, а поверхность S4 свободна от действия поверхностных сил (рп = 0).
Для приведенного примера на различных поверхностях, ограничивающих деформируемые среды I и II, должны задаваться граничные условия всех трех основных типов. Очевидно, что на жестко закрепленной поверхности Sз следует задать кинематические граничные условия υ(S3) = υ( , t) = 0. Граничные условия на поверхностях S1 и S2 однотипны и относятся к динамическим условиям, накладывающим ограничения на компоненты тензора напряжений в граничных точках соответствующих тел: , t) = 0. Граничные условия на поверхностях S1 и S2 однотипны и относятся к динамическим условиям, накладывающим ограничения на компоненты тензора напряжений в граничных точках соответствующих тел:  или или  Компоненты тензора напряжений на поверхности S4 преграды также не могут быть произвольными, а взаимосвязаны с ориентацией ее элементарных площадок как Компоненты тензора напряжений на поверхности S4 преграды также не могут быть произвольными, а взаимосвязаны с ориентацией ее элементарных площадок как  . .
Граничные условия на границе раздела (поверхность S5) взаимодействующих деформируемых сред являются наиболее сложными и относятся к условиям смешанного типа, включающим, в свою очередь, кинематическую и динамическую части (см. рис. 3). Кинематическая часть смешанных граничных условий накладывает ограничения на скорости движения индивидуальных точек обеих сред, находящихся в контакте в каждой пространственной точке поверхности S5. Возможны два варианта задания этих ограничений, проиллюстрированные на рис. 4, а и б. По наиболее простому первому варианту предполагается, что скорости движения любых двух находящихся в контакте индивидуальных точек одинаковы (υ = υ = υ ) — это так называемое условие "прилипания", или условие "сварки" (см. рис. 4, а). Более сложным и в то же время более адекватным для рассматриваемого процесса является задание условия "непроницаемости", или условия "непротекания" (υ · n= υ · n; см. рис. 4, б), которое соответствует экспериментально подтверждающемуся факту: взаимодействующие деформируемыесреды не могут проникать ) — это так называемое условие "прилипания", или условие "сварки" (см. рис. 4, а). Более сложным и в то же время более адекватным для рассматриваемого процесса является задание условия "непроницаемости", или условия "непротекания" (υ · n= υ · n; см. рис. 4, б), которое соответствует экспериментально подтверждающемуся факту: взаимодействующие деформируемыесреды не могут проникать

Рисунок 4
друг в друга или отставать друг от друга, а могут проскальзывать одна относительно другой со скоростью υ – υ, направленной по касательной к границе раздела ((υI – υII) · n = 0). Динамическая часть смешанных граничных условий на границе раздела двух сред формулируется на основе третьего закона Ньютона с использованием соотношений теории напряжений (рис. 4, в). Так, в каждой из двух находящихся в контакте индивидуальных частиц деформируемых сред I и IIреализуется свое напряженное состояние, характеризуемое тензорами напряжений (σ)I и (σ) II.При этом в среде I на каждой элементарной площадке границы раздела с единичным вектором нормали nII, внешней по отношению к данной среде, действует вектор полного напряжения σnI = (σ)·nI. В среде IIна той же площадке, но с единичным вектором нормали nII , внешней по отношению к этой среде, действует вектор полного напряжения σnII=(σ)II· пII. С учетом взаимности действия и противодействия σnI = - σ nII , а также очевидного условия nI = —nII = n устанавливается взаимосвязь между тензорами напряжений в обеих взаимодействующих средах на границе их раздела: (σ)I·п = (σ) II ·п или же (σijI- σijII) nj = 0.Возможные варианты задания граничных условий не исчерпываются рассмотренным частным примером. Вариантов задания начальных и граничных условий столь же много, сколь много существует в природе и технике процессов взаимодействия деформируемых тел или сред. Они определяются особенностями решаемой практической задачи и задаются в соответствии с приведенными выше общими принципами.
Список использованных источников
1. Duhamel C. Memoire sur equations generales de la propagation de la chaleur dans les corps solides don’t la conductibilite nest pas la mkme dans tous les sens // J. de l’Ecole Polytechnique. – 1832. – Vol. 13. – P.356 – 399.
2. Neumann F.E. Die Gezetze der Doppelbrechung des Lichtes in comprimirten order ungleichfororming erwarmten uncrystallinischen Korpern // Abhandl. Konigl. Akad. Wissen. Berlin. – 1841. – № 2. – Teil. S. – 254.
3. Коваленко А.Д. Термоупргость. – Киев: Изд – во АН УССР,1975. – 216с.
4. Зарубин В.С., Кувыркин Г.Н. Математические модели термомехани -ки. – М.: ФИЗМАТЛИТ, 2002. – 168с.
5. Шиллер Н. Н. О втором законе термодинамики и об одной новой его формулировки. – К.: “Университетские известия”, 1898.
6. Caratheodory C. Untersuchungen uber die Grundlagen der Thermodynamik // Math. Ann. – 1909. – Vol. – 67.
7. Афанасьева – Эренфест Т.А. Необратимость, односторонность и второе начало термодинамики. // Журн. Прикладнойфизики. – 1928. – Т.5, № 3 – 4. – С. 3 – 29.
8. Lame G. Lecons sur la Theorie analitique de la Chaleur. – Paris: Mallet – Bachelier, 1897. – 414p.
9. Лыков А.В. Теория теплопроводности. – М.: Высшая школа, 1967. – 599с.
10. Карслоу Г., Егер Д. Теплопроводность твердых тел. – М.: Наука, 1964 – 487с.
11. Новацкий В. Теория упругости. – М.: Мир, 1975. – 872с.
12. Карнаухов В.Г. Связанные задачи термоупругости. – К.: Наука, думка, 1982. – 260с.
13. Червинко О.П., Сенченков И.К., Доля Е.В. Расчет параметров тепловой неустойчивости слоистой призмы. // Теорет. и прикладная механика. – 2005. – Вып.40. – С. 63 – 67.
14. Фильштинский Л.А., Сиренко Ю.В. Двумерные фундаментальные решения в связанной задаче термоупругости. // Теорет. и прикладная механика. – 2003. – Вып.37. – С. 157 – 161.
15. Папкович П.Ф. Выражение общего интеграла основных уравнений теории упругости через гармонические функции. // Изв. АН СССР. Отделение математических и естественных наук. – 1937. – Т.1, № 2. – С. 245 – 246.
16. Папкович П.Ф. Общий интеграл тепловых напряжений. // Прикладная математика и механика. – 1937. – Т.1, № 2. – С. 245 – 246.
17. Лебедев Н.Н. Температурные напряжения в теории упругости. – М. – Л.: Гостехтеоретиздат, 1937. – 110с.
18. Прусов И.А. Некоторые задачи термоупругости. – Минск: Изд-во Белорус. ун-та, 1972. – 200с.
19. Узделов А.И. Некоторые задачи термоупругости анизотропного тела. – Саратов: Изд-во СГУ, 1967. – 167с.
20. Лехницкии С.Д. Теория упругости анизотропного тела. – М.: Наука, 1977. – 416с.
21. Космодамианский А.С., Калоеров С.А. Температурные напряжения в многосвязанных пластинах. – Донецк: Виша шк., 1983. – 160с.
22. Кушнир Р.М., Николишин А.М., Осадчук В.А. Задача термоупругости для ортотропной цилиндрической оболочки с поперечной сквозной трещинной. // Теорет. и прикладная механика. – 2003. – Вып.37. – С. 109 – 113.
23. Шевченко В.П., Гольцев А.С. Фундаментальное решение уравнений термоупругости пологих ортотропных оболочек. // Доп. НАН Украина. – 2001. – № 12. – С. 56 – 60.
24. Гольц А.С. Фундаментальное решение уравнений плоской задачи термоупругости для тонких ортотропных пластин при симметричном теплообмене. // Высш. Донец. ун-ту. Сер. А. Природн. науки. – 1999. – Вып.1. – С. 51 – 56.
25. Илюшин А.А., Победря Б.Е. Основы математической теории термовязкоупругости. – М.: Наука, 1970. – 280с.
26. Карнаухов В.Г., Сенченков И.К., Гуменюк Б.П. Термомеханическое поведения вязкоупругих тел при гармоническом нагружении. – К.: Наук. думка, 1985. – 288с.
27. Карнаухов В.Г., Киричек И.Ф. Электротермовязкоупругость. – К.: Наук. думка, 1988. – 328с. – (Механика связанных полей в элементах конструкций: В5-ти т.; T.4).
28. Шевчук Ю.Н., Савченко Ю.Г. Термовязкопластичность. – К.: Наук. думка, 1987. – 238с. – (Механика связанных полей в элементах конструкций: В5-ти т.; T.2).
29. Шевченко Ю.Н. Термопластичность при переменных нагружениях. – К.: Наук. думка, 1970. – 287с.
30. Шевченко Ю.Н. Приближенные методы решения задач термопластичности при повторном нагружении. // Прочность и пластичность. – М.: Наука, 1971. – С. 383 – 391.
31. Шевченко Ю.Н. Об определяющих уравнениях теории пластического течения при неизотермических процессах нагружения. // Тепловые нагружения в элементах конструкций. – 1987. – Вып.18. – С. 17 – 23.
32. Карнаухов В.Г. Об исследованиях А.Д. Коваленко по термомеханике связанных полей в материалах и элементах конструкций и их дальнейшем развитии // Прикладная механика. – 2005. – Т.41, № 9. – С. 16 – 25с.
33. Коваленко А.Д. Развитие исследований в области термоупругости, термопластичности, термовязкоупругости. // Прикладная механика. – 1969. – Т.5,№ 12. – С. 1 – 16.
34. Коваленко А.Д. Особенности современной термоупругости. // Прикладная механика. – 1970. – Т.6, № 4. – С. 23 – 30.
35. Мелешко В.В. Метод суперпозиции в задачах о тепловых напряжениях в прямоугольных пластинах. // Прикладная механика. – 2005. – Т.41,№ 9. – С. 101 – 117.
36. Tauchert T.R. Publications On Thermal Stresses. // J. Therm. Stress. – 2001. – Vol. 24, № 1. – P. 91 – 92.
37. Гейтвуд Б.Е. Температурные напряжения применительно к самолетам, снарядам и ядерным ракетам. – М.: Изд-во иностр. лит., 1959. – 350с.
38. Гузь А.Н., Махорт Ф.Г. Акустоэлектромагнитоупругость. – К.: Наук. думка, 1988. – 2888с. – (Механика связанных полей в элементах конструкций: В5-ти т.; T.2).
39. Илюшин А.А. Механика сплошной среды. – М.: Изд-во МГУ, 1988. – 220с.
40. Новацкий В. Электромагнитные эффекты в твердых телах. – М.: Мир, 1986, - 160с.
41. Партон В.З., Кудрявцев Б.А. Электромагнитоупругость пьезоэлектрических и электропроводных тел. – М.: Наука, 1988. – 472с.
42. Penfield P., Haus H.A. Elektrodynamics of moving media. – Cambridge: MIT, 1967. – 215p.
43. Тимм И.Е. Основы теории электричества. – М.: Наука, 1976. – 616с.
44. Hutter K. van de Ven A. A. Field-matter interation in thermoelastic solids. – Lecture Notes in Physics. – 88. – Berlin: Springer-Verlag. 1978. – 234p.
45. Тарлецкий Я.П., Рыбаков Ю.П. Электродинамика. – М.: Высш. шк., 1980. – 335с.
46. Кит Г.С., Кривцун М.Г. Плоские задачи термоупругости для тел с трещинами. – К.: Наук. думка, 1983. – 280с.
47. Коваленко А.Д. Термоупругость. – К.: Вища. шк., 1975. – 216с.
48. Савин Г.Н. Распределение напряжений около отверстий. – К.: Наук. думка, 1968. – 887с.
49. Калоеров С.А., Антонов Ю.С. Термонапряженное состояние конечной многосвязанной анизотропной пластинки с отверстиями и трещинами // Высш. Донец. ун-ту. Сер. А. Природн. науки. – 2004. – № 1. – С. 103 – 110.
50. Калоеров С.А., Антонов Ю.С. Термонапряженное состояние анизотропной пластинки с отверстиями и трещинами // Прикладная механика. – 2005. – Т.41, № 9. – С. 127 – 136.
51. Калоеров С.А., Антонов Ю.С. Термонапряженное состояние анизотропной пластинки с отверстиями и трещинами при действии линейного потока тепла и температуры на контурах. // Теорет. и прикладная механика. – 2005. – Вып.40. – С. 102 – 116.
52. Галеркин Б.Г. Определение напряжений и перемещение в упругом изотропном теле при помощи трех функций. Сбор. соч., Т.1. Изд-во АН СССР, 1952.
53. Бабкин А.Б., Селиванов В.В. Основы механики сплошных сред. – М.: МГТУ им. Н.Э. Баумана, 2004. – 371с.
54. Снеддон И.Н., Берии Д.С. Классическая теория упругости. – М.: ФМЗМАТЛИТ, 1961. – 218с.
55. Седов Л.И. механика сплошных сред. – В 2 т. М.: Наука, 1973. – 536с.Т.1.
56. Карташов Э.М. Динамическая термоупругость и проблемы термического удара. // Итоги науки и техники. Серия Механика деформируемого твердого тела. М: ВИНИТИ, 1992. – 122с.
57. Новацкий В. Теория упругости. - М.: Мир, 1986, 556 с.
58. С.К. Тлеукенов Метод матрицанта, Павлодар, НИЦ ПГУ им. С. Торайгырова, 2004, 148 с.
59. Ержанов Ж.С., Жубаев Н.Ж., Тлеукенов С.К. Сейсмические волны в неоднородной среде. – Алматы: Наука, 1985. – 176 с.
60. Тлеукенов С.К. О характеристической матрице периодически неоднородного слоя. В кн.: Математические вопросы теории распространения волн. – Ленинград: Зап. научн. семин., ЛОМИ, 1987. - Т.165. - С. 177-181.
61. Tleykenov S. The structure of propagabor matrix and it is application in the case of the periodical inhomogeneous media. Abstr. Semin. on Earthquake processes and their consequences Seismological investigations. 1989. - Kurukshetra, India. - P. 4.
62. Тлеукенов С.К., Сейтханова А.К., Испулов Н.А. О структуре фундаментальных решений уравнений движения термоупругих волн в различных анизотропных средах, // Материалы международной научной конференции «Первые Ержановские чтения». - Павлодар, 2004. - T. 3.- C. 195-200.
63. Тлеукенов С.К., Испулов Н.А., Сейтханова А.К. О приложении метода матрицанта к изучению распространения термоупругих волн в анизотропной среде моноклинной сингонии, Журнал «Вестник Инженерной академии», Серия Прикладная математика и механика, №2. - Алматы, 2005. - С. 47-51.
64. Тлеукенов С.К., Кудерин М.К., Козионов В.А., Испулов Н.А., Баяубаев Е.К. Сейтханова А.К. Динамические и термодинамические процессы в скальных грунтах и строительных конструкциях / Под. ред. академика АЕН, д.ф.-м.н., профессора С.К. Тлеукенова. – Павлодар, 2006. – 275 с.
65. Тлеукенов С.К., Досумбеков К.Р., Ильясов М., Сейтханова А.К. О матричной формулировке задачи отражения и преломления термоупругих волн // Материалы международной научной конференции «Вторые Ержановские чтения». - Актобе, 2007.
|