Розділ 1. Поняття відкритих систем, дисипативні структури. 3
Розділ 2. Фізичний та динамічний хаос. 5
Розділ 4. Фрактальні структури й розмірність дивних атракторів. 17
Розділ 5. Застосування понять фізики відкритих систем до моделювання обробки інформації. 25
Висновок. 30
Список використаної літератури. 31
Вступ
Метою даної роботи є розгляд питання, чим являється у наш час фізика відкритих систем? Під час навчання нам довелося вивчити курс загальної фізики і у ньому не було згадки про фізику відкритих систем. То ж чи являється фізика відкритих систем окремим предметом і які питання вона вивчає?
Фізика відкритих систем – міждисциплінарний науковий напрям. Для його характеристики можна привести короткий перелік ключових слів і понять: хаос і порядок; відкриті системи; критерії відносного ступеня впорядкованості станів відкритих систем; норма хаотичності; деградація й самоорганізація; діагностика відкритих систем; конструктивна роль динамічної нестійкості руху атомів; перехід від оборотних рівнянь до необоротних. Кінетичний і гідродинамічний опис нерівноважних процесів з урахуванням структури "суцільного середовища"; опис на цій основі рівноважних і нерівноважних фазових переходів; єдиний кінетичний опис ламінарних і турбулентних рухів; квантові відкриті системи. Багато із цих понять не є новими. Однак, метою фізики відкритих систем є розвиток ідей і методів єдиного опису цього широкого кола питань.
Фізика відкритих систем почала свій розвиток лише нещодавно, із середини ХХ століття, коли вчені побачили, що за допомогою тих чи інших математичних моделей можна описати досить складні процеси у відкритих системах, зокрема рухи повітряних мас та шарів води, які отримали своє застосування у гідро- та аеродинаміці, коливні процеси. Останнім часом фізика відкритих систем почала вивчати також і процеси обміну інформацією, адже процеси навчання, передачі та обробки інформації також можна віднести до галузі застосування фізики відкритих систем.
Розглянемо питання, що ж являють собою відкриті системи? Відкриті системи можуть обмінюватися з навколишніми тілами енергією, речовиною й, що не менш важливо, інформацією. Процес обміну енергії чи маси носить назву дисипації. Розглянемо лише макроскопічні відкриті системи. Вони складаються з багатьох об'єктів, які приймемо за елементи структури. Ці елементи можуть бути мікроскопічними, наприклад атоми або молекули у фізичних і хімічних системах. Ці елементи також можуть бути відносно малими, але все-таки макроскопічними. Це, наприклад, макромолекули в полімерах, клітини в біологічних структурах.
Завдяки складності відкритих систем у них можливе утворення різного роду структур. Дисипація енергії відіграє при утворенні таких структур конструктивну роль. Це здається, на перший погляд, дивним, так як поняття дисипації асоціюється із згасанням різного роду рухів, з розсіюванням енергії, із втратою інформації. Однак, і це надзвичайно істотно, дисипація необхідна для утворення структур у відкритих системах. Щоб підкреслити це, Ілля Пригожин ввів термін " дисипативні структури" (7, ст. 56). Це надзвичайно ємка й точна назва поєднує всі види структур: тимчасові, просторові й, нарешті, найбільш загальні просторово-тимчасові структури. Прикладом останніх можуть бути автохвилі.
Складність відкритих систем визначає широкі можливості для існування в них кооперованих явищ. З метою підкреслити роль об’єднання при утворенні дисипативних структур Герман Хакен ввів термін синергетика, що означає – спільна дія. Мета синергетики – виявлення загальних ідей, загальних методів і загальних закономірностей у самих різноманітних областях природознавства, а також соціології й навіть лінгвістики. Більше того, у рамках синергетики відбувається кооперування різних спеціальних дисциплін. Синергетика народилася на базі термодинаміки й статистичної фізики. Тому необхідно підкреслити, що в основі теорії відкритих систем лежать фундаментальні фізичні закони.
Хаос і порядок – поняття, які відігравали істотну роль уже у світогляді філософів древності, зокрема, представників школи Платона. Не вдаючись у деталі, відзначимо лише два сформульованих ними положення, які зберігають своє значення й донині.
По уявленнях Платона і його учнів хаос – стан матерії, що залишається в міру усунення можливостей прояву її властивостей. З іншого боку, з хаосу виникає все, що становить зміст світобудови, тобто з хаосу може народжуватися порядок .
В фізиці поняття "хаос" й "хаотичний рух" є фундаментальними, але все-таки недостатньо чітко визначеними. Дійсно, згідно Больцмана, найбільш хаотичним є рух у стані рівноваги. Однак, хаотичними називають і рухи, далекі від рівноважного. Це, наприклад, рух у генераторах шуму, призначених для придушення сигналів.
Хаотичним називають, як правило, і різного роду турбулентні рухи в газах і рідинах. Прикладом може бути турбулентний рух рідини у трубах. Він виникає із ламінарного руху при досить великому перепаді тиску на кінцях труби. При цьому уявлення про турбулентний рух як більш хаотичний, ніж ламінарний, здається зрозумілим. Однак, такий висновок базується на змішуванні понять складності й хаотичності. При спостереженні турбулентного руху проявляється саме складність руху. Питання ж про ступінь хаотичності вимагає додаткового аналізу й для кількісних оцінок необхідні відповідні критерії.
В останні роки стало широко використовуватися поняття "динамічний хаос" для характеристики складних рухів у порівняно простих динамічних системах. Слово "динамічний" означає, що відсутні джерела флуктуації – джерела безладдя.
Із цієї причини поняття "динамічна система" ідеалізоване. Більш реальний хаотичний рух з врахуванням і випадкових джерел руху можна назвати "фізичним хаосом". Його прикладом і є хаотичний рух атомів і молекул у стані рівноваги.
Математичне поняття "динамічний хаос" простежується в роботах А. Пуанкаре й А.Н. Колмогорова.
Одне з фундаментальних понять, з якими доведеться мати справу – це поняття динамічної системи.
Про динамічну систему говорять у тому випадку, якщо можна вказати такий набір величин, які називають динамічними змінними системи, що характеризують стан, і їхні значення в будь-який наступний момент часу випливають із вихідного набору за певним правилом. Це правило задає оператор еволюції системи. Якщо стан системи задається набором N величин, то зміна стану в часі, чи динаміки системи, можна представити як рух точки по траєкторії в N-мірному фазовому просторі, що називають фазовою траєкторією.
Колись у поняття динамічної системи вкладали чисто механічний зміст, маючи на увазі набір тіл, зв'язаних силовими взаємодіями, які підкоряються системі диференціальних рівнянь, що випливають із законів Ньютона. По мірі розвитку науки поняття динамічної системи розширювалось, охоплюючи об'єкти різної природи. Сучасне поняття динамічної системи це результат тривалої еволюції наукових уявлень і синтезу досягнень багатьох дисциплін. Воно має на увазі можливість задання оператора еволюції будь-яким способом, не обов'язково диференціальним рівнянням. Зокрема, останнім часом й у теоретичних дослідженнях, і в роботах прикладного характеру дуже часто розглядають системи з дискретним часом, які описуються рекурентними відображеннями. У цьому випадку під фазовою траєкторією слід розуміти деяку дискретну послідовність точок у фазовому просторі.
Виділяють два класи динамічних систем – консервативні й дисипативні.
У фізиці під властивістю консервативності розуміється збереження енергії. Зокрема, механічні коливальні системи під час відсутності тертя відносяться до консервативних систем. У присутності тертя механічна енергія не зберігається, а поступово розсіюється (дисипує) і переходить у тепло, тобто в енергію мікроскопічного руху молекул, що становлять систему і її оточення. У цьому випадку тимчасова еволюція повинна визначатися не тільки станом самої системи, але й оточенням. І у цій ситуації опис у рамках концепції динамічних систем, заданих, наприклад, диференціальними рівняннями, дуже часто виявляється вірним і досить точним. Це буде вже дисипативна динамічна система. Ми хотіли б, однак, асоціювати консервативність і дисипативність із вихідними поняттями теорії динамічних систем.
Нехай ми маємо деяку динамічну систему, тобто задане фазовий простір і зазначений оператор еволюції. Замість однієї системи розглянемо ансамбль, що складається з великої кількості її ідентичних копій, причому всі представники ансамблю можуть відрізнятися один від одного тільки лише початковими умовами. У фазовому просторі ансамбль представляється хмарою точок. Із часом кожна точка, переміщається у фазовому просторі, як записано динамічними рівняннями системи, так що форма хмари і її розміри будуть змінюватися.
Може трапитися, що об'єм хмари в процесі тимчасової еволюції буде залишатися постійним. Це характерно для консервативних систем, до яких відносяться, зокрема, розглянуті в класичній механіці гамільтонові системи.
Для гамільтонової системи розмірність фазового простору N парна; стан задається набором динамічних змінних  , , , (i = 1, ..., N/2), які називають узагальненими координатами й імпульсами. Кількість пар координат й імпульсів, тобто величину, удвічі меншу розмірності фазового простору, називають числом ступенів вільності. Для систем з безперервним часом динаміка задається рівняннями Гамільтона , (i = 1, ..., N/2), які називають узагальненими координатами й імпульсами. Кількість пар координат й імпульсів, тобто величину, удвічі меншу розмірності фазового простору, називають числом ступенів вільності. Для систем з безперервним часом динаміка задається рівняннями Гамільтона
 
де H ( ) - певна для кожної даної системи функція N змінних, названа гамільтоніаном. Гамільтонова система з дискретним часом (відображення) у самому загальному випадку може бути виражена неявно через одну функцію N змінних F ( ) - певна для кожної даної системи функція N змінних, названа гамільтоніаном. Гамільтонова система з дискретним часом (відображення) у самому загальному випадку може бути виражена неявно через одну функцію N змінних F ( ), яку називають похідною функцією: ), яку називають похідною функцією:

Тут величини, відзначені штрихами, відносяться до наступного моменту дискретного часу.
Що стосується дисипативних систем, то для них характерно, що із часом хмара точок, стискається і концентрується на одному або декількох атракторах – підмножинах фазового простору, що володіють звичайно нульовим фазовим об'ємом (див. рис. 1 (б)). З погляду динаміки в часі, це означає, що режим, що виникає в системі, наданій самій собі протягом тривалого часу, стає незалежним від початкового стану (принаймні, при варіації початкових умов у деяких кінцевих границях).
Прості приклади аттракторів – стійкий стан рівноваги й стійкий граничний цикл – замкнута фазова траєкторія, до якої прямують із часом всі близькі траєкторії. Граничний цикл відповідає, як відомо, режиму періодичних автоколивань.
При наявності у фазовому просторі двох або більше атракторів говорять, що має місце, відповідно, бістабільністъ або мультистабільность. Безліч точок фазового простору, з яких траєкторії приходять врешті-решт до якогось одного атрактора, називається басейном цього атрактора.
Одним з важливих понять теорії динамічних систем являється поняття інваріантної множини. Безліч точок фазового простору називають інваріантним у тому випадку, якщо фазова траєкторія, що стартує з будь-якої його точки, цілком належить цій множині. Будь-який атрактор – це інваріантна множина, але не навпаки. Нестійкі нерухомі точки, нестійкі замкнуті орбіти – це також інваріантні множини. На відміну від атракторів, які мають місце тільки в дисипативних системах, інваріантні множини зустрічаються й у дисипативних, і в консервативних динамічних системах.
Варто чітко усвідомлювати, що поняття динамічної системи є теоретична абстракція, так само як багато інших звичних і корисних наукових абстракцій (матеріальна точка, абсолютно тверде тіло, нестислива рідина, ідеальний газ). Реальні об'єкти можуть розглядатися як динамічні системи тільки в певному наближенні, в тій мірі, у якій при описі динаміки можна ігнорувати тонкі деталі внутрішньої структури системи і її взаємодію з навколишнім світом.
Успіхи класичної механіки в ХVII-ХІХ ст. були настільки вражаючими, що почало здаватися можливим уявляти собі весь Всесвіт як одну гігантську динамічну систему. Ця доктрина, що одержала назву лапласівського детермінізму, виразила в концентрованому виді ідеал наукового пізнання, яким він бачився в ті часи. Знадобився тривалий шлях розвитку науки й наукового світогляду (теорії поля, термодинаміки й статистичної фізики, квантової механіки), щоб переконатися в неспроможності такого уявлення про світ.
Як ми тепер знаємо, ідеал лапласівського детермінізму принципово недосяжний навіть у тому випадку, якщо обмежитися рамками абстракції динамічних систем. Феномен, що яскраво демонструє цю обставину, був відкритий і став загальновідомим в останні кілька десятиліть. Це динамічний хаос. Хаотичні режими характеризуються нерегулярними, схожими на випадкові процеси, змінами динамічних змінних у часі. У дисипативних системах хаос асоціюється з наявністю у фазовому просторі дивних атракторів – складно влаштованих фрактальних множин, що притягують до себе всі траєкторії з деякої прилягаючої області (басейну атрактора).
Можливість хаотичного руху здається на перший погляд несумісною із самим визначенням динамічної системи, заснованому на твердженні про можливості однозначного визначення кінцевого стану по вихідному. Якщо намагатися підійти до проблеми, взявши за відправну точку яку-небудь реальну фізичну систему, то питання здається зовсім непростим. Однак є інший шлях – звернутися до моделей, що представляють собою штучно сконструйовані іграшкові приклади, які свідомо являють собою динамічні системи, допускають детальний теоретичний аналіз й демонструють хаос.
Раніше ми розглядали приклади динамічних систем з хаотичною поведінкою, які сконструйовані штучно. Чи може виникати хаос у фізичних системах або їхніх реалістичних моделях, наприклад, при описі звичними для більшості фізиків диференціальними рівняннями. Класичною стала модель Лоренца.
В 1963 р. американський дослідник Едвард Лоренц, що займався проблемами прогнозування погоди, опублікував у журналі «JournalofAtmosphericSciences» статтю «Детермінований неперіодичний потік». Ця робота була присвячена дослідженню модельної нелінійної системи трьох звичайних диференціальних рівнянь першого порядку, що виходила як результат певних наближень при аналізі задачі про конвекцію шару рідини, що підігрівається знизу. При чисельному розв’язку завдання на комп'ютері виявлялося встановлення в системі хаотичного режиму, що характеризувався складною, неперіодичною зміною динамічних змінних у часі. Проте, цей режим можна розглядати як стаціонарний, оскільки його статистичні характеристики, усереднені за досить великий інтервал часу, залишаються постійними. Цікаво, що система рівнянь Лоренца застосовується не тільки до завдання про конвекцію в шарі, але й до інших систем. До них відносяться одномодова модель лазера, конвекція в трубці, модель водяного колеса, дисипативний осцилятор з інерційним збудженням.
Розглянемо шар рідини глибиною h, що перебуває в полісили тяжіння. Нехай на верхній межі підтримується постійна температура То
, а на нижній межі То
+ ∆Т.
Через те що нагріта рідина легша за холодну, при досить великій різниці температур виникає конвекційний потік рідини, опис якого й становить предмет дослідження. У вихідній постановці задачі ми маємо справу з розподіленою системою – її стан характеризується полями розподілу швидкості v (x, y, z, t), густини (x, y, z, t) і температури Т ((x, y, z, t), що еволюціонують у часі. Зміна цих полів у часі описується системою рівнянь із частковими похідними

 (3.1) (3.1)

де - векторний оператор Гамильтона (i, j, k- орти прямокутної системи координат), елемент g обумовлений присутністю сили ваги, - векторний оператор Гамильтона (i, j, k- орти прямокутної системи координат), елемент g обумовлений присутністю сили ваги,  - поле тиску, - поле тиску,  - коефіцієнт кінематичної в'язкості, - коефіцієнт кінематичної в'язкості,  - коефіцієнт температуропровідності, - коефіцієнт температуропровідності,  - коефіцієнт теплового розширення. - коефіцієнт теплового розширення.
Ми хочемо тепер одержати наближений опис, у рамках якого можна було б працювати з скінченномірною динамічною системою. Які можна зробити припущення? По-перше, обмежимося двовимірним заданням. Будемо вважати систему відстані уздовж осі г, перпендикулярною до площини малюнка. Нехай всі змінні величини не залежать від  і - компонента швидкості відсутня. По-друге, використаємо так назване наближення Бусинеска. Воно полягає в тому, що рідина вважається мало стиснутою й залежність густини від температури враховується в рівняннях тільки в одному місці, у правій частині рівняння для швидкості. Покладемо, що і - компонента швидкості відсутня. По-друге, використаємо так назване наближення Бусинеска. Воно полягає в тому, що рідина вважається мало стиснутою й залежність густини від температури враховується в рівняннях тільки в одному місці, у правій частині рівняння для швидкості. Покладемо, що
 (3.2) (3.2)
де  - відхилення поля тисків від гідростатичного тиску - відхилення поля тисків від гідростатичного тиску  а а  - відхилення температури від лінійного профілю, і використаємо в правій частині першого рівняння (3.1) наступне подання: - відхилення температури від лінійного профілю, і використаємо в правій частині першого рівняння (3.1) наступне подання:
 (3.3) (3.3)
З огляду на те, що g
= -j
g , переписуємо рівняння у вигляді:
 (3.4) (3.4)
Корисно помітити, що  , оскільки в другому рівнянні (3.4) , оскільки в другому рівнянні (3.4)  . На верхній і нижній краї шару накладемо граничні умови, що виражають сталість температури й відсутність потоку рідини через границю: . На верхній і нижній краї шару накладемо граничні умови, що виражають сталість температури й відсутність потоку рідини через границю:
 (3.5) (3.5)
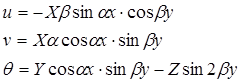
Розпишемо векторні рівняння в координатах, позначаючи x- і у-компоненти швидкості через u і . Щоб записати співвідношення для компонентів швидкості, слід відмітити , що з умови нульової дивергенції  випливає, що U та V повинні виражатися через похідні від однієї й тієї ж функції випливає, що U та V повинні виражатися через похідні від однієї й тієї ж функції  , яка називається функцією течії: , яка називається функцією течії:
 (3.6) (3.6)
Функція течії має вигляд:
 (3.7) (3.7)
Тоді для компонентів швидкості маємо
 (3.8) (3.8)

Далі, можна підставити вираження (3.8) у рівняння (3.4) і, використовуючи співвідношення ортогональності для базисних функцій, одержати систему рівнянь.
 (3.9) (3.9)
Прирівнюючи коефіцієнти в лівій і правій частині, одержуємо:
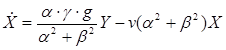 (3.10) (3.10)
Із другим рівнянням поступаємо аналогічно. Різниця, однак, у тім, що в лівій частині тепер присутні дві просторові моди – комбінації косинусів та синусів:
 (3.11) (3.11)
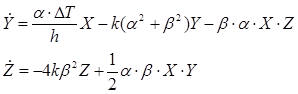
Отже, ми знайшли систему трьох звичайних диференціальних рівнянь для динамічних змінних X, Y, Z. Щоб з нею було зручно працювати, корисно привести рівняння до безрозмірного виду за допомогою деякої заміни змінних і параметрів. Підставимо в (3.10)-(3.11) X = Ах, Y = Ву, Z = Cz, t = Dτ, де А, В, C, D- деякі постійні коефіцієнти. Тоді отримуємо:
 (3.12) (3.12)
Спробуємо підібрати коефіцієнти так, щоб вид рівнянь максимально спростився.
 (3.13) (3.13)
Крім того введемо безрозмірні параметри:
 (3.14) (3.14)
Тоді рівняння (3.12) матимуть вигляд:
 (3.15) (3.15)
Це і є модель Лоренцо (3.15). Вона являє собою динамічну систему із тривимірним фазовим простором. Миттєвий стан визначається набором трьох змінних (х, y, z), а оператор еволюції визначений конкретним видом рівнянь (3.15). Змінна х характеризує швидкість обертання конвекційних валів, величини y и z відповідають за розподіл температури, відповідно, по горизонталі й по вертикалі. Параметр b визначається геометрією конвекційного осередку, а саме, відношенням її вертикального й горизонтального розмірів а. Параметр  є відношення коефіцієнта кінематичної в'язкості й коефіцієнта температуропровідності v/k. Його називають числом Прандтля. Комбінацію є відношення коефіцієнта кінематичної в'язкості й коефіцієнта температуропровідності v/k. Його називають числом Прандтля. Комбінацію  називають числом Рєлея. У свій час Рєлей показав, що умові виникнення конвекційного ходу у вигляді валів відповідає певне критичне значення цього числа, а саме, називають числом Рєлея. У свій час Рєлей показав, що умові виникнення конвекційного ходу у вигляді валів відповідає певне критичне значення цього числа, а саме,  . З формули (3.10) видно, що параметр г являє собою відношення . З формули (3.10) видно, що параметр г являє собою відношення  . .
Дисипативні динамічні системи володіють тією властивістю, що їх розв’язки при  притягуються до деякої підмножини міри нуль у фазовому просторі. Ця підмножина для випадку регулярної динаміки може бути або стійкою стаціонарною точкою, або стійким граничним циклом, або інваріантним тором. Всі ці підмножини є підмножинами фазового простору. Математичним вираженням хаотичних коливань дисипативних систем служить дивний атрактор, який уже не володіє гладкою структурою й достатньою безперервністю. Геометрична будова дивних атракторів більш складна. Вони володіють геометричною {масштабною) інваріантністю, або, як іноді говорять, скейлинговою структурою. притягуються до деякої підмножини міри нуль у фазовому просторі. Ця підмножина для випадку регулярної динаміки може бути або стійкою стаціонарною точкою, або стійким граничним циклом, або інваріантним тором. Всі ці підмножини є підмножинами фазового простору. Математичним вираженням хаотичних коливань дисипативних систем служить дивний атрактор, який уже не володіє гладкою структурою й достатньою безперервністю. Геометрична будова дивних атракторів більш складна. Вони володіють геометричною {масштабною) інваріантністю, або, як іноді говорять, скейлинговою структурою.
Щоб краще уявити собі, про що йде мова, розглянемо характерний приклад – атрактор Ено, що виникає в простій моделі, яка описується точковим відображенням Ено.
Ми вже знаємо, що дивні атракторы можуть з'являтися в системах диференціальних рівнянь, розмірність фазового простору яких більше або рівна трьом,  . Однак складні геометричні притягаючі множини, можуть виникати й у так званих точкових відображеннях – динамічних системах з дискретним часом. Використовуючи точкові відображення, можна описувати системи самої різної природи – від фізичної до біологічної. Відображення Ено – це оборотне двовимірне точкове відображення, яке в принципі можна розглядати як відображення Пуанкаре для деякої двомірної січної поверхні і трьохмірного потоку. . Однак складні геометричні притягаючі множини, можуть виникати й у так званих точкових відображеннях – динамічних системах з дискретним часом. Використовуючи точкові відображення, можна описувати системи самої різної природи – від фізичної до біологічної. Відображення Ено – це оборотне двовимірне точкове відображення, яке в принципі можна розглядати як відображення Пуанкаре для деякої двомірної січної поверхні і трьохмірного потоку.
Розглянемо в п-мірному фазовому просторі динамічної системи деяку множину А. Покриємо дану множину п-мірними кубиками зі стороною а так, щоб ці кубики містили всі точки множини сили А. Нехай N – мінімальне число кубиків, необхідних для покриття А. Розглянемо межу
 (4.1) (4.1)
Величина  є метричною розмірністю й називається ємністю або фрактальною розмірністю (5). Зауважимо, що в літературі ємність іноді називають також хаусдорфовою або ентропійною розмірністю. є метричною розмірністю й називається ємністю або фрактальною розмірністю (5). Зауважимо, що в літературі ємність іноді називають також хаусдорфовою або ентропійною розмірністю.
Для регулярних сил (наприклад, шматка тривимірного евклідового простору, поверхні або лінії) фрактальна розмірність дорівнює цілому числу (відповідно 3, 2, 1) і співпадає зі звичайною розмірністю. Дійсно, при малих а з (4.1) одержуємо:
 (4.2) (4.2)
Однак для нерегулярних сил, що володіють масштабно-інваріантною структурою, фрактальная розмірність має дробове значення.
Визначимо спочатку фрактальную розмірність множин, які ми розглянули раніше, множини середніх третин і килима Серпиньського.
З побудови сил середніх третин витікає, що вони
Рис. 4. Побудова множини Кантора. складаються із  розділених інтервалів довжиною розділених інтервалів довжиною  кожний. Справді, при к=0 N=1, a=1. Якщо к=1, то N=2, a=1/3, для к=2, N=4, a=1/9 і для k = m і (рис. 4). кожний. Справді, при к=0 N=1, a=1. Якщо к=1, то N=2, a=1/3, для к=2, N=4, a=1/9 і для k = m і (рис. 4).
Тут к означає число ітерацій побудови сил. Отже, використавши формулу (4.1), одержимо:

Визначимо тепер фрактальну розмірність килима Серпиньського. Маємо
К=1, N= 8=81
а=1/31
К=2, N= 8·8=82
а=1/32
К=3, N= 8·8·8=83
а=1/33
К=m, N= 8m
а=1/3m
Таким чином, килим Серпиньского – цевже не лінія, розмірність якої дорівнює одиниці, але ще й не поверхня, оскільки розмірність поверхні дорівнює двом. Це щось проміжне лінією й двовимірною поверхнею. Самим несподіваним є те, що в природі дійсно існують об'єкти, що представляють собою аналог килима Серпиньського в тому розумінні, що їхня розмірність більше одиниці й менше двох. Найбільш відомі з них – це фрактальні агрегати колоїдних часток. Отже, канторова сила – це не чиста математична абстракція.
Як ми вже відзначали, дивні атрактори звичайно близькі по своїй структурі до канторових сил, тому варто очікувати, що розмірність дивного атрактора буде дробовою. Таким чином, значення розмірності можна використати як критерій відмінності простих атракторів від дивних. В основній роботі Рюеля й Такенса термін "дивний" атрактор був уведений авторами саме для того, щоб підкреслити, що такі атрактори не є гладкими множинами.
Через надзвичайну важливість фрактальної розмірності виникає питання про явне її обчислення для тих або інших атракторів динамічних систем.
Існує гіпотеза, висунута Капланом і Йорке, відповідно до якої фрактальна розмірність пов'язана з характеристичними показниками Ляпунова  . Ця гіпотеза припускає, що фрактальна розмірність dF
збігається з ляпуновскою розмірністю dL
. . Ця гіпотеза припускає, що фрактальна розмірність dF
збігається з ляпуновскою розмірністю dL
.
Длятого, щоб встановити геометричну структуру дивного атрактора, необхідно взяти яку-небудь малу область фазового простору й простежити, як із часом вона еволюціонує. Інформацію про зміну малого елемента фазового об'єму динамічної системи дають характеристичні показники Ляпунова.
Деяке критичне значення атрактор може перетерпіти якісну перебудову, а динаміка системи різко змінитися. Зокрема, із граничного циклу може виникнути інваріантний тор і періодичний рух зміниться на квазіперіодичний.
Значення параметрів, при яких відбувається топологічна (або якісна) перебудова сталих режимів руху в системі, називаються біфуркаційними значеннями, а сама перебудова – біфуркацією. При безперервній зміні параметрів можуть виникнути послідовності біфуркацій.
Встановлення в динамічній системі хаотичного режиму руху в результаті тієї або іншої послідовності біфуркацій прийнято називати сценарієм або картиною розвитку хаосу. Тут ми обговоримо найбільш важливі й типові із цих сценаріїв.
Припустимо, що динамічна система, що задає диференціальними рівняннями, залежить від деякого керуючого параметру  : :

Припустимо також, що система (1) має стаціонарний розв’язок х°. Природно, що це рішення залежить від керуючого параметру,  . Допустимо далі, що стаціонарна точка . Допустимо далі, що стаціонарна точка  системи (1) стійка при системи (1) стійка при  до й нестійка при μ> μ0
. Отже, при μ = μ0
реальна частина деяких власних значень матриці лінеаризації стає позитивною, тобто перетинає уявну вісь праворуч. до й нестійка при μ> μ0
. Отже, при μ = μ0
реальна частина деяких власних значень матриці лінеаризації стає позитивною, тобто перетинає уявну вісь праворуч.
Якщо при цьому зміниться топологічна структура розбивки фазового простору системи на траєкторії, то точка μ = μ0
буде точкою біфуркації потоку х(t) динамічної системи (1).
Найбільш відомим прикладом біфуркації стаціонарного стану є біфуркація Андронова - Хопфа, коли стаціонарне рішення х° динамічної системи втрачає стійкість у результаті того, що пара комплексно-сполучених власних значень  матриці лінеаризації переходить в праву на півплощину. При цьому в системі збуджуються періодичні коливання з періодом матриці лінеаризації переходить в праву на півплощину. При цьому в системі збуджуються періодичні коливання з періодом  і відбувається біфуркація народження із спочатку стійкої стаціонарної точки граничного циклу. Якщо в цьому випадку народжений цикл стійкий, то говорять про м'яку втрату стійкості. і відбувається біфуркація народження із спочатку стійкої стаціонарної точки граничного циклу. Якщо в цьому випадку народжений цикл стійкий, то говорять про м'яку втрату стійкості.
Інший часто зустрічний механізм біфуркації втрати стійкості стаціонарного стану Х° динамічної системи, - це тверде збудження, коли стійка стаціонарна точка зливається з навколишнім нестійким граничним циклом. У цьому випадку з наближенням керуючого параметру μ до біфуркаційного значення μ0
область притягання стаціонарного стану х° системи одночасно з розмірами граничного циклу зменшується до нуля, і при μ = μ0
цикл зникає, зливаючись із Х° і передаючи йому свою нестійкість. При μ = μ0
всі фазові криві залишають деяку межу точки х.
У цьому випадку реалізується тверда втрата стійкості: при проходженні через до система стрибком переходить на інший режим руху.
Припустимо, що в результаті біфуркації Андронова - Хопфа народився стійкий граничний цикл. Які подальші можливі біфуркації в системі при зміні керуючого параметру? Відповідь на це питання не є однозначною: тут, як і при біфуркації втрати стійкості стаціонарного стану, може реалізуватися декілька випадків. Розглянемо тільки характерні випадках, при реалізації яких подальші біфуркації в системі можуть привести до появи дивного атрактора:
1. Втрата стійкості вихідного циклу й народження інваріантного
двовимірного тора (рис. 7).
2. Народження граничного циклу подвоєного періоду.
Досліджуючи стійкість станів, що відповідають ситуації 1, можна прийти до наступної картини. У результаті біфуркації втрати стійкості граничного циклу у фазовому просторі динамічної системи народжується інваріантний тор. Як і для гамільтонових систем, істотним моментом тут є відношення частот руху уздовж меридіана тору й уздовж його осі. Якщо відношення ірраціональне, тобто не може бути представлене як m/n, де m и n цілі числа, то фазова траєкторія всюди щільно покриває тор. У іншому випадку, тобто при раціональному відношенні частот, у фазовому просторі виникне граничний цикл, що розташований на торі. Поведінка системи в цьому випадку стане періодичною.
З наступною зміною параметра й у фазовому просторі багатомірної динамічної системи може відбутися втрата стійкості двовимірного інваріантного тору й народження тривимірної тороїдальної множини. При цьому поведінка системи характеризується трьома незалежними частотами. Подальша зміна керуючого параметру може привести до послідовності біфуркацій, у результаті яких у фазовому просторі дисипативних динамічних систем виникають інваріантні тори наростаючої розмірності. В кінцевому підсумку ми приходимо до складного квазіперіодичного руху з неспіврозмірними частотами, який при дуже великому μ0
буде виглядати як хаотичний. Вважаючи, що такий шлях розвитку хаосу дійсно можливий, Ландау і незалежно Хопф висунули гіпотезу, відповідно до якої хаотична динаміка дисипативних систем є не що інше, як рух по інваріантному тору великої розмірності. Такий тор буде займати у фазовому просторі область, що відповідає різним наборам початкових фаз, і фазова траєкторія, що намотується на нього, буде із часом проходити практично через будь-яку як завгодно малу частину цієї області.
Квазіперіодичний рух, нехай навіть із дуже більшим числом неспіврозмірних частот, не може бути названий хаотичним, оскільки для такого руху відсутнє розбігання фазових кривих, відповідальне за появу хаотичної динаміки. Крім того, варто сказати, що багатомірний квазіперіодичний притягаючий рух з більшим числом неспіврозмірних частот не є типовим і зустрічається надзвичайно рідко. Під дією завжди присутніх збурень такий рух із часом вироджується в періодичний, що відповідає появі у фазовому просторі граничного циклу, або ж руйнується й дає початок хаотичному режиму. Відзначимо також, що картина Ландау – Хопфа не підтверджується експериментально: після невеликого числа біфуркацій звичайно спостерігається різкий перехід до хаотичного руху.
Вперше на можливість руйнування тороїдальної множини, у результаті якої відбувається народження дивного атрактора, звернули увагу Д. Рюель і Ф. Такенс. Автори досліджували поводження розв’язку динамічної системи при досить загальних припущеннях щодо характеру векторного поля. Ними було показано, що якщо при зміні керуючих параметрів після трьох біфуркацій (починаючи зі стаціонарного стану) виникає трьохчастотний квазіперіодичний рух, то він нестійкий, легко руйнується, і на місці зруйнованого тривимірного тору з'являється дивний атрактор.
Зупинимося на цьому сценарії розвитку хаосу більш детально.
Нагадаємо, що кожна динамічна система, як припускалося вище, задається відповідним векторним полем V. Сукупність всіх можливих векторних полів V утворить деякий функціональний простір Ф. Кожна точка цього функціонального простору відповідає одній з можливих динамічних систем, і навпаки, кожна динамічна система відповідає єдиній точці функціонального простору Ф. Якщо злегка збурити праві частини рівняння, ми одержимо нову динамічну систему, для якої векторне поле буде близьке до вихідного.
При побудові математичної моделі будь-якого реального процесу завжди доводиться прибігати до певних спрощень, зневажати впливом малоістотних факторів і т.п. Отже векторне поле, що входить у праву частину динамічних рівнянь завжди буде відоме лише з якимсь ступенем точності, тобто в межах деякої границі V функціонального простору Ф. Тому очевидно, що якщо розглянута властивість динамічної системи не є структурно стійкою, то для реальних систем вона в експерименті спостерігатися не буде.
Теорема Рюеля й Такенса стверджує, що якщо існує векторне поле V на тривимірному торі, що відповідає трьохчастотному квазіперіодичному рухові, то в будь-якій околиці V відповідної точки функціонального простору Ф найдуться векторні поля в на тривимірному торі, що володіють дивними атракторами. Аналогічне твердження справедливе для квазіперіодичних рухів і на торах більшої розмірності. Інакше кажучи, у принципі достатньо слабко обурити праві частини системи, щоб рух із квазіперіодичного із трьома неспіврозмірними частотами перейшов в хаотичний. Однак це виконується не для всіх векторних полів.
Деякі експериментальні дані свідчать про те, що сценарій переходу до хаосу Рюэля - Такенса, очевидно, дійсно виконується для ряду систем. Були проведені експерименти по дослідженню конвекції Рэлея -Бенара в горизонтальному шарі. Зі збільшенням градієнта температури перед переходом до хаотичного руху в спектрі швидкості рідини спостерігалася спочатку одна, а потім дві незалежні частоти. Хаотичний режим, що характеризується суцільним спектром, з'являвся відразу слідом за квазіперіодичною двохчастотною течією.
Знання основних закономірностей утворення структур в активних середовищах, а також у мережах, що складаються з великої кількості активних елементів, дозволяє перейти до цілеспрямованого створення розподілених динамічних систем, які формують ті або інші просторові структури. Одним з основних застосувань при цьому є завдання аналогової обробки інформації. Використання як елементів обробки інформації не окремих сигналів, а протяжних просторових структур дає можливість різко підвищити ефективність комп'ютера в проблемах розробки штучного інтелекту. Є ряд свідчень, що саме аналогові механізми лежать в основі роботи людського мозку. Людський мозок – це гігантська мережа з десятків мільярдів нервових клітин – нейронів, зв'язаних між собою відростками (дендритами й аксонами). Число зв'язків одного нейрона може досягати десятків тисяч. Завдяки роботам нейрофізіологів досить добре відомий механізм дії окремого нейрона. Нервова клітина здатна перебувати в одному із трьох дискретних станів – спокою, збудження й рефрактерності (стану незбудливості). Переходи між станами керуються як процесами всередині самої клітини, так й електричними сигналами, що надходять до неї по відростках від інших нейронів. Перехід від стану спокою до збудження відбувається пороговим методом при майже одночасному надходженні досить великої кількості імпульсних сигналів збудження. Перейшовши у збуджений стан, нейрон перебуває в ньому протягом певного часу, а потім самостійно переходить у стан рефрактерності. Цей стан характеризується дуже високим порогом збудження: нейрон практично не здатний реагувати на находжені до нього сигналів збудження. Через якийсь час здатність до збудження відновлюється й нейрон повертається в стан спокою.
Крім будови окремих нервових клітин відносно добре вивчені глобальні аспекти діяльності мозку – спеціалізація його великих областей, функціональні зв'язки між ними й т.п. У той же час мало відомо, як же здійснюється обробка інформації на проміжному рівні, у ділянках нейронної мережі, що містять усього десятки тисяч нервових клітин.
Іноді мозок уподібнюють до колосальної обчислювальної машини, що відрізняється від звичайних комп'ютерів лише значно більшим числом складових елементів. Вважається, що кожен імпульс збудження переносить одиницю інформації, а нейрони відіграють роль логічних перемикачів у повній аналогії із будовою ЕОМ. Така точка зору помилкова. Робота мозку повинна ґрунтуватися на дещо інших принципах. У мозку немає твердої структури зв'язків між нейронами, що була б подібна до електричної схеми ЕОМ. Надійність його окремих елементів (нейронів) набагато нижча, ніж елементів, використовуваних для створення сучасних комп'ютерів. Руйнування навіть таких ділянок, які містять досить велике число нейронів, найчастіше майже не впливає на ефективність обробки інформації в цій області мозку. Частина нейронів відмирає при старінні організму. Ніяка обчислювальна машина, побудована на традиційних принципах, не зможе працювати при таких великих ушкодженнях.
Сучасні обчислювальні машини виконують операції послідовно, по одній операції на такт (подібно людині з арифмометром або логарифмічною лінійкою). Число витягається з пам'яті, записується в процесор, де над ним проводиться деяка дія в відповідності з поставленою програмною інструкцією, і результат знову направляється в пам’ять. Взагалі, при виконання окремої операції електричний сигнал повинен пройти по провідниках відстань порядку розмірів центрального процесора, тому виникає обмеження на швидкодію такої обчислювальної машини.
Нехай розмір процесора дорівнює 30 см. Електричний сигнал пробігає цю відстань по металевих провідниках зі швидкістю світла за час 10-9
с. Тому, якщо всі операції виконуються послідовно, теоретична межа швидкодії цієї обчислювальної машини становить мільярд операцій за секунду.
Аналогові машини виконують за один такт не окрему дію чи операцію, а певну їх сукупність. Сьогодні інтерес до аналогових машин відроджується. Головну увагу привертають розподілені аналогові машини, що представляють собою просторові мережі із взаємодіючих між собою елементів. "Одиницями" обробки інформації в подібних машинах є цілі просторові картини.
Вузьку спеціалізацію аналогових машин можна перебороти, наділивши їх здатністю до навчання. Розглянемо це питання докладніше. Припустимо, що в закони взаємодії між елементами, які формують мережу аналогової машини, спочатку жорстко ("фізично") вбудована тільки одна програма – програма навчання. Підкоряючись цій програмі, у процесі попереднього тренування система перебудовує свою структуру: у ній встановлюються нові або розриваються старі зв'язки між елементами мережі, модифікуються параметри, що характеризують окремі елементи, і т.д. Пройшовши навчання, ця аналогова машина здобуває здатність до вирішення деякого завдання – розпізнавання образів, що належать певному набору, або пошуку оптимального шляху (траєкторії, послідовності дій) і т.д..
В наш час отримує все більш широке визнання точка зору, відповідно до якої мозок людини (і тварин) являє собою саме аналоговий пристрій, що навчається. З експериментів, наприклад, відомо, що процес навчання в людини (і тварин) супроводжується встановленням нових синаптичних контактів між нейронами й модифікацією вже наявних синаптичних зв'язків. Установлено, що пам'ять не локалізована в окремих нейронах або невеликих групах нервових клітин. Зразки, що зберігаються в пам'яті, не губляться, а лише начебто тьмяніють при ушкодженнях окремих ділянок головного мозку.
Основний вид діяльності в людини й вищих тварин - це операції із семантичними структурами: їхнє розпізнавання, генерація, передача, перетворення й порівняння. За словами М. Мінського, «задовго до того як наші предки навчилися розмовляти, у них уже виникли спеціальні механізми мозку для уявлення об'єктів, розходжень і причин; ці механізми пізніше лягли в основу нашої мови (і граматики в тому числі)».
Всі необхідні операції із семантичними структурами повинні здійснюватися в мозку як динамічні процеси в складній розподіленій нелінійній системі. Мозок є середовищем, де семантичні структури "живуть своїм життям": еволюціонують, взаємодіють і конкурують між собою.
Всі ці питання привертають увагу насамперед через можливе практичне застосування. Не очікуючи повного з'ясування всіх питань, що відносяться до роботи мозку, можна ставити завдання побудови таких пристроїв для обробки інформації, у яких були б втілені принципи роботи мозку.
Головна тенденція в розвитку сучасної обчислювальної техніки полягає в переході до використання розподілених систем, які утворені з логічних елементів з досить простою внутрішньою структурою. Великі надії тут зв'язують із молекулярною мікроелектронікою. Сучасний рівень розвитку технології дозволяє створювати схеми із розмірами порядку розмірів полімерної молекули. Розробляються методи масового хімічного синтезу таких молекулярних елементів і способи їхнього сполучення в мережі на основі механізмів самозборки.
Однак, навіть якщо будуть остаточно вирішені проблеми технологічного характеру, на шляху до створення молекулярного комп'ютера залишається кілька принципових теоретичних проблем.
Очевидно, що пристрій молекулярних розмірів не може працювати як традиційна ЕОМ з послідовним виконанням операцій. На молекулярному рівні неможливо позбутися локальних дефектів структури, обумовлених домішками й ''дислокаціями", а також від впливу теплових флуктуацій. Все це вимагає використати схемотехніку з великою стійкістю від локальних ушкоджень. Крім того, як відзначалося вище, сам по собі послідовний характер виконання операцій уже накладає значні обмеження на швидкодію ЕОМ.
Тому молекулярний комп'ютер повинен бути заснований на принципі паралельних обчислень. З декількох сотень або тисяч молекулярних елементів можна формувати блоки, які виконуватимуть роль окремих примітивних процесорів обробки інформації, або клітинних автоматів. Мережа з таких блоків, зв'язаних між собою, формує розподілене обчислювальне середовище.
Основні труднощі, що виникають на цьому шляху, - це "криза програмування". Чим менші розміри окремих блоків і чим щільніше їхнє розміщення, тим складніше програмувати роботу такого комп'ютера. Лише в найпростіших випадках, при прямій аналоговій імітації процесів з локальними взаємодіями, що протікають в однорідних умовах, або при первинній найпростішій обробці зображень, всі елементи мережі повинні виконувати ідентичні інструкції. У наш час неможливо створити такий єдиний програмний блок, що видавав би індивідуальні інструкції для кожного примітивного процесора з молекулярними розмірами.
Вихід тут полягає у створенні систем, які були б здатні до самонавчання. У таких розподілених системах на елементному рівні жорстко запрограмована лише здатність до навчання. Пристосування подібної обчислювальної мережі до рішення конкретних завдань досягається потім у процесі індивідуального її навчання або "тренування". Всі розроблені до теперішнього часу моделі мереж, що здатні до навчання, у тій або іншій мірі засновані на спробах імітації процесів у нейронних мережах мозку. У зв'язку із цим стосовно розроблювального нового покоління обчислювальної техніки, що широко використовує принципи навчання, часто застосовують терміни "нейрокомп’ютер" або "біокомп’ютер".
Хоча найбільш адекватною базою для майбутніх нейрокомп’ютеров є молекулярна електроніка, це не виключає створення обчислювальних мереж, що навчаються, на основі традиційної напівпровідникової плівкової технології або оптоелектроніки.
У роботі розглянуті питання, що стосуються розвитку уявлень про фізику відкритих систем, розглянуто основні галузі застосування фізики відкритих систем до аналізу складних рухомих систем, а саме атмосферних явищ, турбулентних та конвективних процесів в рідинах та атмосфері, коливних та авто коливних процесів.
Фізика відкритих систем також займається вивченням методів обробки інформації та створенням систем штучного інтелекту, самонавчаючих систем та нейронних систем обробки інформації, що являється важливим етапом у створенні комп’ютерних систем нового покоління. У майбутньому ми станемо свідками розширення застосування фізики відкритих систем у багатьох галузях життя.
1. Ю.Л. Климентович. Введение в физику открытых систем. Соросовский образовательный журнал, №8, 1996, с. 109 – 116.
2. Ю.Л. Климентович.Критерии относительной упорядоченности открытых систем. Успехи физических наук. Т. 166, 311, 1996, 1231 – 1243.
3. В. С. Анищенко Динамические системы. Соросовский образовательный журнал, №2, 1994, с. 87 – 92.
4. С.П.Кузнецов Динамический хаос. М.: Наука. 2001, 297 с.
5. Р. М. Кроновер Фракталы и хаос в динамических системах. Основы теории. Пер. с англ. М.: Постмаркет, 2000, 352 с.
6. А.Ю.Лоскутов, А.С.Михайлов Введение в синергетику. М.: Наука, 1990, 272 с.
7. И.Пригожин, И. Стенгерс Порядок из хаоса. Пер. с англ. М.: Прогресс, 1989, 431 с.
8. А.Л.Эфрос Физика и геометрия беспорядка. Библиотека «Квант». М.: Наука, 1982, 265 с.
|