1.
Структурный анализ
механизма
Представлен кривошипно-ползунный механизм.
Число степеней исследуемого механизма определим по формуле Чебышева:
 (1)
(1)
где n –
число подвижных звеньев в составе исследуемой кинематической цепи; p4
и p5
– соответственно число пар четвертого и пятого класса.
Для определения величины коэффициента n
проанализируем структурную схему механизма (рисунок 1):
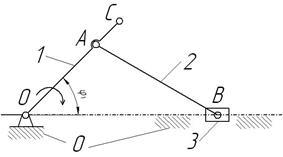
Рисунок 1 – Структурная схема механизма
Структурная схема механизма состоит из четырех звеньев:
1 – кривошип,
2 – шатун АВ,
3 – ползун В,
0 – стойка,
при этом звенья 1 – 3 являются подвижными звеньями, а стойка 0 – неподвижным звеном. Она представлена в составе структурной схемы двумя шарнирно-неподвижными опорами и направляющей ползуна 3.
Следовательно, n=3.
Для определения значений коэффициентов p4
и p5
найдем все кинематические пары, входящие в состав рассматриваемой кинематической цепи. Результаты исследования заносим в таблицу 1.
Таблица 1 – Кинематические пары
| № |
Кинематическая пара (КП) |
Схема кинема-
тической пары
|
Класс кинема-
тической пары
|
Степень подвиж-
ности
|
| 1 |
0 – 1 |
 |
5
вращательная
|
1
|
| 2 |
1 – 2 |
 |
5
вращательная
|
1 |
| 3 |
2 – 3 |
 |
5
вращательная
|
1 |
| 4 |
3 – 0 |
 |
5
вращательная
|
1 |
Из анализа данных таблицы 1 следует, что исследуемый механизм ДВС с увеличенным ходом поршня состоит из семи пар пятого класса и образует замкнутую кинематическую цепь. Следовательно, p5
=4,
а p4
=0.
Подставив найденные значения коэффициентов n, p5
и p4
в выражение (1), получим:
 (1) (1)
Для выявления структурного состава механизма разбиваем рассматриваемую схему на структурные группы Ассура.
Первая группа звеньев 0-3-2 (рисунок 2).
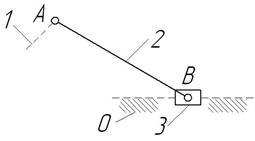
Рисунок 2 – Структурная группа Ассура
Данная группа состоит из двух подвижных звеньев:
шатун 2 и ползун 3;
двух поводков:
кривошип 1 и направляющая (стойка) 0;
и трех кинематических пар:
1-2 – вращательная пара пятого класса;
2-3 – вращательная пара пятого класса;
3-0 – поступательная пара пятого класса;
тогда n=2; p5
=3, a p4
=0.
Подставив выявленные значения коэффициентов в выражение (1),
получим:

Следовательно, группа звеньев 4-5 является структурной группой Ассура 2 класса 2 порядка 2 вида.
Вторая группа звеньев 0-1 (рисунок 3).
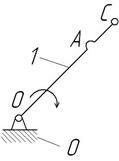
Рисунок 3 – Первичный механизм
Данная группа звеньев состоит из подвижного звена – кривошипа 1, стойки 0 и одной кинематической пары:
0 – 1 – вращательная пара пятого класса;
тогда n=1; p5
=1, a p4
=0.
Подставив найденные значения в выражение (1), получим:

Следовательно, группа звеньев 1 – 2 действительно является первичным механизмом с подвижностью 1.
Структурная формула механизма
МЕХАНИЗМ=ПМ(W=1) + СГА(2 класс, 2 порядок, 2 вид)
2. Синтез кинематической схемы
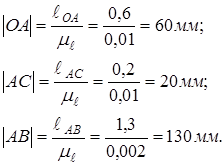
Для синтеза кинематической схемы сперва необходимо установить масштабный коэффициент длин μℓ
. Для нахождения μℓ
необходимо взять натуральный размер кривошипа OС и разделить его на размер отрезка произвольной длины │OС│:

После этого, с помощью масштабного коэффициента длин, переводим все натуральные размеры звеньев в отрезки, с помощью которых мы будем строить кинематическую схему:
После вычисления размеров приступаем к построению одного положения механизма (рисунок 4) с помощью метода засечек.
Для этого сперва вычерчиваем стойку 0 на которой закреплен кривошип. Затем проводим через центр окружности, которая была начерчена для построения стойки, горизонтальную прямую ХХ. Она необходима для последующего нахождения центра ползуна 3. Далее из центра этой же окружности проводим две другие радиусом  и и  . Затем от туда же строим чертим отрезок длиной под углом . Затем от туда же строим чертим отрезок длиной под углом  к горизонтальной прямой ХХ. Точки пересечения этого отрезка с построенными окружностями будут точками А и С соответственно. Затем из точки А строим окружность радиусом к горизонтальной прямой ХХ. Точки пересечения этого отрезка с построенными окружностями будут точками А и С соответственно. Затем из точки А строим окружность радиусом  . .
Точка пересечения этой окружности с прямой ХХ будет являться точкой В. Вычерчиваем направляющую для ползуна, которая будет совпадать с прямой ХХ. Строим ползун и все остальные необходимы детали чертежа. Обозначаем все точки. Синтез кинематической схемы завершен.
3. Кинематический анализ плоского механизма
Приступаем к построению плана скоростей для положения механизма. Для упрощения расчетов следует рассчитать скорости и направления для всех точек положения механизма, а затем строить план скоростей.
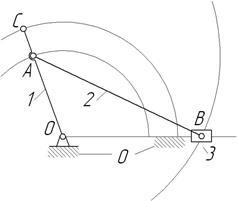
Рисунок 4 – Одно из положений механизма
Проанализируем схему кривошипно-ползунного механизма: точка О и О1
являются неподвижными точками, следовательно, модули скоростей этих точек равны нулю ( ). ).
Вектор скорости точки А представляет собой геометрическую сумму вектора скорости точки О и скорости относительного вращательного движения точки А вокруг точки О:
 . (2) . (2)
Линия действия вектора скорости  является перпендикуляром к оси кривошипа 1, а направление действия этого вектора совпадает с направлением вращения кривошипа. является перпендикуляром к оси кривошипа 1, а направление действия этого вектора совпадает с направлением вращения кривошипа.
Модуль скорости точка А:
  , (3) , (3)
где  - угловая скорость звена ОА; - угловая скорость звена ОА;  - длина OС. - длина OС.
Угловую скорость найдем по формуле, подставив заданное значение n:
 . (4) . (4)
Подставив заданные значения в выражение (5), получим:
 . (5) . (5)
Далее рассчитаем масштабный коэффициент плана скоростей  : :
 , (6) , (6)
где  - модуль скорости точки А; - модуль скорости точки А;  - произвольно выбранный отрезок, изображающий на плане скоростей вектор скорости точки А. Примем - произвольно выбранный отрезок, изображающий на плане скоростей вектор скорости точки А. Примем  , тогда по выражению (6) получим: , тогда по выражению (6) получим:
 . (7) . (7)
Отрезок, изображающий вектор скорости точки С, найдем, воспользовавшись теоремой подобия:
 (8) (8)
откуда
 . (9) . (9)
Отложив отрезок  на плане скоростей найдем положение точки с
. Этот отрезок будет являться вектором скорости точки С. на плане скоростей найдем положение точки с
. Этот отрезок будет являться вектором скорости точки С.
Вектор скорости точки В, принадлежащей шатуну 2, представляет собой геометрическую сумму вектора скорости точки А и вектора скорости относительного вращательного движения точки В вокруг точки А:
 (10) (10)
В то же время точка В принадлежит и ползуну 3. Ползун 3 совершает только прямолинейное возвратно-поступательное движение вдоль направляющей XX, следовательно, линия действия вектора скорости точки В проходит параллельно XX:
 . (11) . (11)
Разрешив графически векторные уравнения (9, 10, 11), построим план скоростей (рисунок 5).
Замерив для каждого плана скоростей длину векторов и с помощью масштабного коэффициента скоростей, найдем числовые значения по формулам

 (12) (12)
Так же рассчитаем угловые скорости для звеньев, совершающих вращательное движение:
 (13) (13)
Для упрощения расчетов построим таблицу (таблица 2), внося найденные значения по уравнениям (12) и (13) линейных и угловых скоростей, соответственно:
Таблица 2 – Линейные, угловые скорости положения механизма
| Положение |
Линейные скорости (м/с) |
Угловые скорости (с-1
) |
|
 |
 |
 |
 |
|
 |
| 1 |
29,3 |
29,3 |
11,1 |
22,7 |
9,77 |
36,63 |
8,53 |

Рисунок 5 – План скоростей
Для построения плана ускорений составим векторные уравнения. Вектор ускорения точки А представляет собой геометрическую сумму вектора ускорения точки О, вектора нормального ускорения и вектора тангенциального ускорения относительного вращательного движения точки А вокруг точки О:
 (14) (14)
В уравнении (17) первое слагаемое равно нулю ( ), так как точка О является неподвижной, а третье слагаемое равно нулю, так как угловая скорость звена ОА постоянна ( ), так как точка О является неподвижной, а третье слагаемое равно нулю, так как угловая скорость звена ОА постоянна ( ). Тогда уравнение (14 примет следующий вид: ). Тогда уравнение (14 примет следующий вид:

Модуль ускорения точки А:
 (15) (15)
Теперь подберем масштабный коэффициент ускорений:
 (16) (16)
где  - модуль ускорения точки А; - модуль ускорения точки А;  - произвольно выбранный отрезок, изображающий на плане ускорений вектор ускорения точки А. Примем - произвольно выбранный отрезок, изображающий на плане ускорений вектор ускорения точки А. Примем  , тогда с учетом равенства (16)получим: , тогда с учетом равенства (16)получим:

Длину отрезка, изображающего на плане ускорений вектор ускорения точки С, найдем, воспользовавшись теоремой подобия:
. (17)
Вектор ускорения точки В принадлежащей шатуну 2 представляет геометрическую сумму вектора ускорения точки А, вектора нормального ускорения и вектора тангенциального ускорения относительного вращательного движения точки В вокруг точки А:
 (18) (18)
Модуль вектора  найдем по выражению: найдем по выражению:

Длина отрезка, изображающего в составе плана ускорений вектор :
 (19) (19)
В то же время точка В принадлежит и ползуну 3. Ползун 3 совершает только прямолинейное возвратно-поступательное движение вдоль направляющей ХХ, следовательно, линия действия вектора ускорения точки D проходит параллельно прямой ХХ:

Разрешив графически векторные уравнения (17,18,19), построим планы ускорений для всех найденных положений. После построения замерим для каждого плана длины отрезков 
Используя найденные значения отрезков, определим модули соответствующих ускорений:
 (20) (20)
Так же, для расчетов, необходимо определить ускорения центров масс представленных звеньев. Центры масс шатунов 2, 4 и коромысла 3 считаем расположенными по середине этих звеньев. Соединив на планах ускорений точки  и a
, а
и b
;
и определив середины этих отрезков мы получим центры масс звеньев s
1
,
s
2
. Проведя от точки
вектора к вышеуказанным точкам мы получим соответствующие вектора ускорений центров масс. Измеряя длину этих отрезков мы сможем определить модули этих отрезков: и a
, а
и b
;
и определив середины этих отрезков мы получим центры масс звеньев s
1
,
s
2
. Проведя от точки
вектора к вышеуказанным точкам мы получим соответствующие вектора ускорений центров масс. Измеряя длину этих отрезков мы сможем определить модули этих отрезков:
 (21) (21)
Определим угловые ускорения звеньев:
 (22) (22)
Угловая скорость кривошипа 1 является постоянной величиной, следовательно, угловое ускорение этого звена равно нулю, т.е.  . Ползун 3 совершает только поступательные движения, следовательно, угловое ускорение этого звена тоже равно нулю, т.е. . Ползун 3 совершает только поступательные движения, следовательно, угловое ускорение этого звена тоже равно нулю, т.е.  . .
Таблица 3 – Нормальные составляющие ускорений
| Положение |
 |
 м/с2 м/с2
|
 м/с2 м/с2
|
 |
 |
 |
| 1 |
1073 |
94,8 |
1076 |
752 |
753 |
827 |
Кинематический анализ успешно проведен.

Рисунок 6 – План ускорении
4. Определение сил, действующих на звенья механизма
На каждое звено плоского рычажного механизма действует сила тяжести, которая находится по формуле:
 (23) (23)
где g=9,81 м/с2
- ускорение свободного падения, а  - масса i-го звена. - масса i-го звена.
Для определения массы каждого звена плоского рычажного механизма воспользуемся следующими формулами:
 (24) (24)
Далее определяем силы тяжести для каждого звена плоского рычажного механизма:
  (25) (25)
Также мы можем определить силы инерции, действующие на звенья плоского рычажного механизма, по формуле:
 (26) (26)
где - масса i-го звена, а  - ускорение центра масс i-го звена. - ускорение центра масс i-го звена.
Уславливаемся, что центр масс кривошипа лежит на оси его вращения, т.к в большинстве случаев кривошип – вал механизма, т.е 
Также уславливаемся, что у линейных звеньев центр масс лежит на середине звена. Значения ускорений центра масс найдены в кинематическом анализе плоского рычажного механизма. Находим силы инерции:
 (27) (27)
Определяем моменты от сил инерции:
 (28) (28)
где  - момент инерции i-го звена, угловое ускорение i-го звена. - момент инерции i-го звена, угловое ускорение i-го звена.
Момент инерции i-го звена:
 (29) (29)
где - масса i-го звена,  - длина i-го звена. - длина i-го звена.
Находим моменты от сил инерции:

Момент от сил инерции направлен противоположно направлению действию углового ускорения. Для определения углового ускорения звена необходимо на плане ускорений взять вектор тангенциальной составляющей ускорения звена и мысленно перенести его в ведомую точку звена (точка, стоящая первой в индексе), а ведущую условно остановить. Направление вращения звена при этом будет характеризовать направление углового ускорения звена.
Нанесем на построенное положение механизма все заданные внешние нагрузки. В результате, полученная картина будет являться расчетной схемой данного положения плоского рычажного механизма.
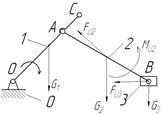
Рисунок 7 – Расчетная схема силового анализа
5. Кинетостатический метод силового анализа
В данном курсовом проекте силовой анализ мы проведем с помощью кинетостатического метода, в основе которого лежит принцип Д’Аламбера. Если к внешним силам, действующим на звенья механизма добавить силы инерции, то данный механизм будет находиться в квазистатическом состоянии. Силовой анализ этого механизма можно выполнить, используя уравнения кинетостатического равновесия:
 (30) (30)
Этот метод применяется для анализа движущихся механизмов при известных массах и моментах инерции звеньев.
Для этого разбиваем механизм на структурные группы Ассура и начинаем вычерчивать с последней группы звеньев (группы, связанной с выходным звеном).
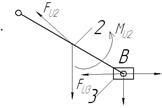
Рисунок 6 – Структурная группа Ассура 1
Разорванную связь 1-2 заменяем реакцией R12
, раскладывая ее на составляющие  и и  , а нормаль XX реакцией R03
. Составляем уравнение равновесия: , а нормаль XX реакцией R03
. Составляем уравнение равновесия:
 (31) (31)
 (32) (32)
Уравнение равновесия (32) содержит три неизвестных , и  , следовательно, его статическая неопределимость равна двум. , следовательно, его статическая неопределимость равна двум.
С целью раскрытия статической неопределимости найдем модуль . .
Звено АВ: 
 (33) (33)

В результате проведенных вычислений уравнение (32) содержит две неизвестных и , следовательно статическая неопределимость раскрыта полностью. Уравнение равновесия примет следующий вид:
 (34) (34)
Определение оставшихся неизвестных выполним с помощью плана сил. Для этого необходимо выбрать масштабный коэффициент плана сил:
 (35) (35)
Переведем в масштабный коэффициент  оставшиеся силы: оставшиеся силы:
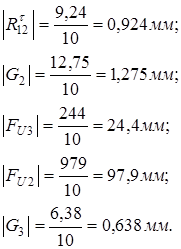 (36) (36)
По полученным величинам строим план сил в масштабном коэффициенте  (рисунок 7). (рисунок 7).
По построенному плану сил определяем неизвестные  , и , и  : :
 (37) (37)
Рассмотрим первичный механизм.
Направляем уравновешивающую силу перпендикулярно оси кривошипа, в противоположную сторону вращения оси кривошипа. Вектор выходит из подвижной точки кривошипа.
Составляем уравнение равновесия:
 (38) (38)
Составляем уравнение моментов сил относительно точки O:
 (39) (39)
Из уравнения (4.23) определяем  : :

Уравнение равновесия примем следующий вид:
 (4.24) (4.24)
Определим оставшиеся неизвестные с помощью плана сил. Для этого необходимо выбрать масштабный коэффициент сил:

Переведем в масштабный коэффициент оставшиеся силы:

По полученным данным строим план сил в масштабном коэффициенте (рисунок 8).
По построенному плану определяем неизвестную реакцию  : :

Метод кинетостатики силового анализа завершен.
|