Курсова робота:
Регулювання тиску пара в казані
Зміст
1. Ціль роботи. Завдання. Вихідні дані
2. Характеристика об'єкта керування, опис пристрою й роботи системи САР (Системи Автоматичного Регулювання), складання її функціональної схеми. Принцип автоматичного керування й вид системи
3. Складання структурної схеми системи
4. Визначення закону регулювання системи
5. Визначення передатних функцій системи по керуючому впливу
6. Аналіз стійкості системи. Визначення запасів стійкості
6.1 Аналіз стійкості за критерієм Гурвіца
6.2 Аналіз стійкості за критерієм Найквиста
7. Аналіз залежності статичної помилки системи від зміни керуючого впливу на систему
8. Спільний аналіз зміни керованої величини об'єкта керування й системи від впливу, що обурює, у статиці
9. Оцінка якості керування по перехідних функціях
9.1 Розглянемо оцінку прямих показників якості керування нашої системи
9.2 Швидкодія системи оцінюється часом регулювання
9.3 Коливання перехідного процесу
9.4. По перехідній функції може бути визначена статична помилка системи
10. Загальні виводи по роботі
Література
Ціль роботи: закріплення базових даних і знань за курсом "Основи автоматики" на прикладі проведених аналізів системи автоматичного регулювання.
Завдання:
1. Дати коротку характеристику об'єкта керування, описати пристрій і роботу системи, скласти її функціональну схему. Зробити вивід про принцип автоматичного керування, використаному в системі.
2. Скласти структурну схему системи.
3. Визначити закон регулювання системи.
4. Визначити передатні функції системи.
5. Виконати аналіз стійкості системи за критеріями Гурвіца й Найквиста. Визначити запас стійкості.
6. Проаналізувати залежність статичної помилки системи від зміни керуючого впливу на систему. Зробити вивід про характер цієї залежності.
7. Провести спільний аналіз зміни керованої (регульованої) величини об'єкта керування й системи від впливу, що обурює, у статиці. Дати їхню порівняльну оцінку. Визначити статичну помилку системи по впливу, що обурює.
8. Оцінити якість регулювання по перехідних функціях.
9. Зробити загальні виводи по роботі.
Таблиця 1.1 Вихідні дані
| Параметри |
| Варіант |
Схема |
К1
|
К2
|
Т1
, з |
Кд
|
Тд
, з |
Ку
|
Кдв
|
Кр
|
Кв
|
Тдв, З
|
| 0 |
3 |
0,1 |
0,5 |
100 |
0,5 |
1 |
10 |
0,005 |
0,2 |
40 |
0,5 |
Об'єктом керування (ОК) є казан. Регульованою величиною є кількість подачі палива  , що спалюється й дає певну температуру в казані. При певній температурі в казані буде певний тиск у барабані казана. Керуючим впливом на ОК є відкриття вентиля, що регулює подачу палива. Основний вплив, що обурює, зміна витрати пари (зміна навантаження казана). Додатковими збурюваннями можуть бути, наприклад, зміна температури навколишнього середовища, зміна напруги живлення датчика тиску - манометра 3 з перетворювачем сигналу. , що спалюється й дає певну температуру в казані. При певній температурі в казані буде певний тиск у барабані казана. Керуючим впливом на ОК є відкриття вентиля, що регулює подачу палива. Основний вплив, що обурює, зміна витрати пари (зміна навантаження казана). Додатковими збурюваннями можуть бути, наприклад, зміна температури навколишнього середовища, зміна напруги живлення датчика тиску - манометра 3 з перетворювачем сигналу.
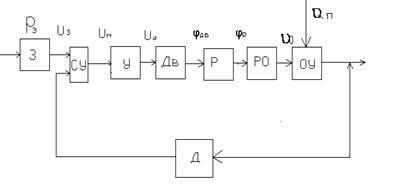
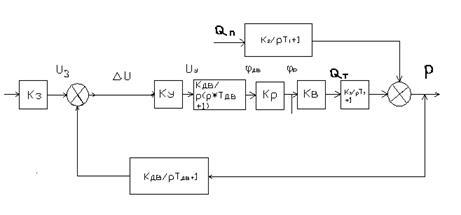
Малюнок 2. Функціональна схема системи.
Система працює в такий спосіб:
У сталому режимі при рівності тиску  в казані заданої в казані заданої  напруга напруга  . .
При відхиленні тиску пари в казані від заданої, на вході ДУ з'являється різниця напруг, відмінна від нуля, що приводить до появи потенціалу на його виході. Починає обертатися двигун, відхиляючи через редуктор фрамуги на кут  , до того моменту, поки різниця напруг не стане дорівнює нулю. , до того моменту, поки різниця напруг не стане дорівнює нулю.
У результаті розгляду пристрою й роботи системи можна зробити наступні виводи:
У системі реалізований принцип керування по відхиленню (помилково).
Система є стабілізуючою й володіє великою інерційностью
3.
Складання структурної схеми системи
Структурною схемою називається наочне графічне зображення математичної моделі (математичного опису) системи.
На структурній схемі кожна ланка зображується прямокутником, усередині якого записується математичний опис ланки. Зв'язку між ланками структурної схеми зображуються лініями зі стрілками, що відповідають напрямку проходження сигналів. Над лініями ставляться позначення сигналів. Складемо структурну схему САР температури поливної води у водонагрівачі. Для цього одержимо передатні функції всіх елементів системи:
1. Рівняння теплиці, як об'єкта керування:
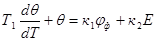 , (3.1) , (3.1)
Зображення Лапласа цього рівняння:
 , (3.2) , (3.2)
Відповідно до принципу суперпозиції зміна вихідної величини такої ланки дорівнює сумі змін вихідних величин по кожному впливі.
Передатна функція водонагрівача по керуючому впливі:
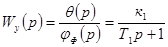 , (3.3) , (3.3)
Передатна функція водонагрівача по впливі, що обурює:
 , (3.4) , (3.4)
Аналогічним образом одержимо передатні функції інших елементів системи.
1. Термометр опору разом з вимірювальним блоком:
 , ,

 , (3.5) , (3.5)
2. Датчик.
 , ,
,
 , (3.6) , (3.6)
3. Диференціальний підсилювач (ДП):



 (3.7) (3.7)
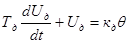
4. Двигун (ДВ):

 , (3.8) , (3.8)
5. Редуктор (Р):

 , (3.9) , (3.9)
6. Фрамуги (ФО):

 , (3.10) , (3.10)
Складемо структурну схему нашої системи.
Датчик (З) є безінерційним. Його коефіцієнт передачі  повинен бути дорівнює коефіцієнту передачі датчика, оскільки задана температура повинен бути дорівнює коефіцієнту передачі датчика, оскільки задана температура й дійсна й дійсна  повинні відніматися в одному масштабі. Тому для наочності дослідження ці коефіцієнти можна перенести за СУ й уважати, що із заданої температури безпосередньо віднімається обмірювана датчиком, і формується сигнал помилки повинні відніматися в одному масштабі. Тому для наочності дослідження ці коефіцієнти можна перенести за СУ й уважати, що із заданої температури безпосередньо віднімається обмірювана датчиком, і формується сигнал помилки  . .
Малюнок 3.1 Структурна схема САР тиску пари в казані.
4.
Визначення закону регулювання системи
Законом регулювання називають математичну залежність, у відповідності, з якого керуючий вплив на об'єкт формувалося б безінерційним регулятором у функції від помилки системи.
Закон регулювання багато в чому визначає властивості системи. Визначимо закон регулювання розглянутої САР тиску пари в казані. Для цього знайдемо передатну функцію, що визначає взаємозв'язок керуючого впливу  на об'єкт і помилки е: на об'єкт і помилки е:
 (4.1) (4.1)
Передатна функція безінерційного регулятора:
 (4.2) (4.2)
 (4.3) (4.3)
Тому:
 (4.4) (4.4)
Залежність керуючого впливу від помилки показує, що в розглянутій системі інтегральний закон регулювання.
5.
Визначення передатних функцій системи по керуючому впливу
Для розглянутої САР тиску пари в казані передатна функція по керуючому впливі:



 (5.1) (5.1)
Передатна функція САР по впливу, що обурює, визначає взаємозв'язок між зміною регульованої величини й зміною впливу, що обурює.
Для даного приклада передатна функція САР температури повітря по впливі, що обурює:
 , (5.2) , (5.2)
де  - передатна функція ланцюга ланок від місця додатка впливу, що обурює, до регульованої величини. - передатна функція ланцюга ланок від місця додатка впливу, що обурює, до регульованої величини.
 (5.3) (5.3)
Передатна функція САР для помилки по керуючому впливу:

 (5.4) (5.4)
Передатна функція САР для помилки по впливу, що обурює:
 (5.5) (5.5)

6.1
Аналіз стійкості за критерієм Гурвіца
Стійкість - це властивість системи вертатися у вихідний або близький до нього сталий режим після зняття впливу, що викликав вихід зі сталого режиму.
Визначимо стійкість САР температури повітря в теплиці. Для цього можна скористатися кожною з отриманих у пункті 5 передатних функцій системи, з яких треба це характеристичне рівняння системи:

Для аналізу стійкості скористаємося безпосередньо умовами стійкості для рівняння четвертого ступеня:  >0, >0,  >0, >0,  >0, >0,  >0, >0,  >0; >0;
 >0 >0
Всі коефіцієнти характеристичного рівняння позитивні.
Перевіримо другу умову:
 >0 >0
Отриманий результат показує, що система стійка.
6.2
Аналіз стійкості за критерієм Найквиста
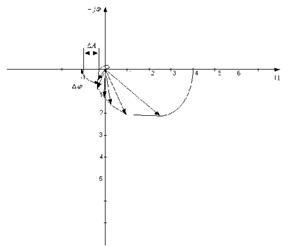
Критерій стійкості Найквиста заснований на використанні амплітудно-фазової частотної характеристики (АФЧХ) розімкнутої системи.
Визначимо стійкість САР температури повітря в теплиці з даними значеннями параметрів. Розімкнемо систему й запишемо її передатну функцію:
 (6.1) (6.1)
Така система називається астатичною.
АФЧХ розімкнутої системи можна побудувати, розрахувавши  й й 
 (6.2) (6.2)
 (6.3) (6.3)
Частотна передатна функція є комплексною функцією:
 (6.4) (6.4)
Вираження для модуля й аргументу можна записати практично без перетворень:
 (6.5) (6.5)
Вираження для модуля й аргументу можна записати практично без перетворень:
 (6.6) (6.6)
 (6.7) (6.7)


 (6.8) (6.8)
Дані розрахунку зводимо в таблицю:
 |
0 |
0,001 |
0,01 |
0,03 |
0,05 |
0,1 |
 |
|
|
30 |
2,4 |
2,4 |
0,15 |
0,03 |
0 |
|
-90 |
-95 |
-131 |
72,8 |
84,38 |
-220 |
360 |
Запас стійкості по амплітуді для даної САР  =0,7, по фазі - =0,7, по фазі -  . Отримані значення . Отримані значення  й й  задовольняють рекомендованим величинам запасів по амплітуді й по фазі. задовольняють рекомендованим величинам запасів по амплітуді й по фазі.
7.
Аналіз залежності статичної помилки системи від зміни керуючого впливу на систему
При виконанні такого аналізу використовують передатну функцію системи для помилки по керуючому впливу.
 (7.1) (7.1)
У статистиці р звертається в нуль, тому статична помилка по керуючому впливу відсутня.
У загальному випадку відсутність статичної помилки по керуючому впливі є наслідком астатизму системи. Як видно з попереднього розділу, розглянута система має астатизм 1-го порядку.
Скористаємося передатними функціями об'єкта керування й системи по впливі, що обурює.
 (8.1) (8.1)
У статиці р звертається в нуль, тому для об'єкта:
 (8.2) (8.2)
 (8.3) (8.3)
Для системи:
 (8.4) (8.4)
 (8.5) (8.5)
де К - коефіцієнт передачі розімкнутої системи.
Після підстановки чисельних значень параметрів одержуємо залежність зміни температури в теплиці при зміні сонячної радіації:
 - для об'єкта без регулятора; - для об'єкта без регулятора;
 - для об'єкта, постаченого регулятором (САР). - для об'єкта, постаченого регулятором (САР).
Передатна функція системи для помилки по впливі, що обурює:
 (8.6) (8.6)
Тому для нашої системи:
 (8.7) (8.7)
Зміна температури в теплиці значно зменшилося в порівнянні зі зміною активності сонячної радіації в  раз. раз.
9.
Оцінка якості керування по перехідних функціях
9.1
Розглянемо оцінку прямих показників якості керування нашої системи
Для перехідної функції по керуючому впливу визначається:
 % (9.1) % (9.1)
де  - максимальне значення регульованої величини в перехідному процесі; - максимальне значення регульованої величини в перехідному процесі;  - стале значення регульованої величини. - стале значення регульованої величини.
У нашім випадку:
 %= %= %=43% (9.2) %=43% (9.2)
Якщо немає спеціальних вимог до системи, то нормальним уважається перерегулювання  <30%. Тому що 43>30 і система має малий запас стійкості при перерегулюванні. <30%. Тому що 43>30 і система має малий запас стійкості при перерегулюванні.
Для перехідних процесів по впливі, що обурює, визначається максимальне відхилення регульованої величини від сталого значення, що доводиться на одиницю впливу, що обурює, F (t):
 (9.3) (9.3)
У нашому випадку при F (t) =1 (t)
 (9.4) (9.4)
9.2
Швидкодія системи оцінюється часом регулювання
Час регулювання  визначається як інтервал часу від початку перехідної функції до моменту, коли відхилення вивідної величини від її нового сталого значення стає менше певної досить малої величини визначається як інтервал часу від початку перехідної функції до моменту, коли відхилення вивідної величини від її нового сталого значення стає менше певної досить малої величини  : :
 (9.5) (9.5)
Приймемо  . У нашій системі для перехідної функції по керуючому впливу: . У нашій системі для перехідної функції по керуючому впливу:
 (9.6), (9.6), 
Для перехідної функції по впливу, що обурює:
 (9.7) (9.7)
9.3 Коливання перехідного процесу
Коливання перехідного процесу визначається числом N для перехідної функції по керуючому впливі або числом коливань N для перехідної функції по впливу, що обурює, за час перехідного процесу
Коливання також оцінюється відношенням сусідніх відхилень регульованої величини від сталого значення:
 (9.8) (9.8)
Для нашої системи по керуючому впливу:
 (9.9) (9.9)
Для перехідного процесу по впливу, що обурює:
 (9.10) (9.10)
9.4. По перехідній функції може бути визначена статична помилка системи
 (9.11) (9.11)
де  - задане значення регульованої величини. - задане значення регульованої величини.
Для нашої системи статична помилка по керуючому впливу:

Статична помилка по впливі, що обурює:

За результатами виконання роздягнула 9 для САР температури поливної води на виході з водонагрівача зробимо наступні виводи:
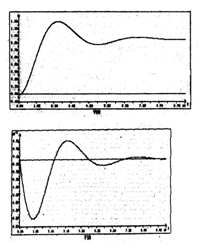
Для розглянутої системи перерегулювання 1 становить 43%, число перерегулювань і коливань системи за час перехідного процесу N=3. Якість системи за цими показниками варто вважати задовільним.
Час регулювання становить близько 59 з, максимальне відхилення регульованої величини від її сталого значення, що доводиться на одиницю східчастого впливу, що обурює, дорівнює 0,294.
Коливання системи близько 0, 19.
10.
Загальні виводи по роботі
Об'єктом керування САР є тиск пару в казані. У САР застосований інтегральний закон регулювання.
Закон регулювання - пропорційний.
Система стійка. Запас стійкості по амплітуді 0,7, по фазі  , що задовольняє рекомендованим запасам стійкості. Система є астатичною. Статична помилка по керуючому впливу , що задовольняє рекомендованим запасам стійкості. Система є астатичною. Статична помилка по керуючому впливу , статична помилка по впливу, що , статична помилка по впливу, що обурює . обурює .
Прямі оцінки якості керування наступні:
Перерегулювання  =47%; число перерегулювань і коливання N=3, що не задовольняє пропонованим вимогам і свідчить про недостатній запас стійкості; час регулювання становить близько 59 з, максимальне відхилення регульованої величини від її сталого значення, що доводиться на одиницю східчастого впливу, що обурює, становить 0,294; Коливання системи дорівнює 0, 19. =47%; число перерегулювань і коливання N=3, що не задовольняє пропонованим вимогам і свідчить про недостатній запас стійкості; час регулювання становить близько 59 з, максимальне відхилення регульованої величини від її сталого значення, що доводиться на одиницю східчастого впливу, що обурює, становить 0,294; Коливання системи дорівнює 0, 19.
Якість системи варто вважати незадовільною.
Література
1. Юревич Е.Н. Теорія автоматичного керування. – К., 2003
2. Бородін І.Ф., Кирилін М.І. Основи автоматики й автоматизації виробничих процесів. – К., 2004
3. Солодовників В.В., Тесль В.Н., Яковлєв О.В. Основи теорії й елементи систем автоматичного регулювання. – К., 2005
4. Бохан Н.И., Бородін И.Ф., Дробишев Ю.В., Фурсенко С.Н., Герасенков О.О. Засоби автоматики й телемеханіки. – К., 2002
5. Бородін І.Ф. Технічні засоби автоматики. – К., 2002
7. Бохан Н.И., Фурунжієв Р.І. Основи автоматики й мікропроцесорної техніки. – К., 1997
8. Сидоренко Ю.О. Методичні вказівки до курсової роботи для спеціальності С.03.02. – К., 2001
|