Федеральное агентство по образованию
Филиал государственного образовательного учреждения высшего профессионального образования «Самарский государственный технический университет» филиал в г. Сызрани
Кафедра электротехники, информатики и компьютерных технологий
КУРСОВАЯ РАБОТА по дисциплине « Теория автоматического управления»
Тема : «Система автоматического регулирования давления в ресивере».
2008 год
Содержание
Техническое задание
Введение
1. Построение структурной схемы нескорректированной системы и определение передаточных функций её звеньев
2. Оценка точности и анализ качества исходной системы
3. Построение логарифмических амплитудно-частотных характеристик для исходной системы, желаемой и корректирующего звена
4. Синтез последовательного корректирующего устройства
5. Оценка точности и качества скорректированной системы с учётом ограничений выходного сигнала регулятора путём моделирования
Заключение
Библиографический список использованной литературы
Техническое задание
Техническое задание включает в себя сведения о принципе действия нескорректированной системы автоматического регулирования (САР), ее функциональную схему, параметры всех звеньев системы, характеристики входных и возмущающих воздействий, показатели качества проектируемой САР.
Для САР приводятся ограничение выходного сигнала электронного усилителя, требуемое значение выходного сигнала, максимальная относительная ошибка системы ν (в %), допустимое относительное перерегулирование σ (в%).
Требуется спроектировать следящую систему автоматического регулирования, удовлетворяющую заданным условиям. Исходная система состоит из набора неизменяемых устройств, необходимо рассчитать корректирующие устройства.
Давление в данной системе контролируется с помощью сильфонного датчика 3, выходная величина которого - перемещение Хс
сильфона 5 однозначно зависит от разности сил ,
где Fр
-
сила, создаваемая давлением Р;
F
о -
сила натяжения пружины 6,
которое можно изменять винтом 7. Перемещение сильфона Хс
с помощью потенциометрического преобразователя 4 преобразуется в электрический сигнал – напряжение U, которое усиливается электронным усилителем 8. ,
где Fр
-
сила, создаваемая давлением Р;
F
о -
сила натяжения пружины 6,
которое можно изменять винтом 7. Перемещение сильфона Хс
с помощью потенциометрического преобразователя 4 преобразуется в электрический сигнал – напряжение U, которое усиливается электронным усилителем 8.
Выходной сигнал усилителя U
,
управляет электромагнитным приводом 9, связанным с заслонкой 2.
В данной САР сильфонный датчик выполняет функции воспринимающего, задающего и сравнивающего органов. Как воспринимающий орган он контролирует давление Р,
преобразуя его в силу F
р.
Задание требуемого давления в ресивере обеспечивается посредством силы F
о.
Как сравнивающий орган сильфон обеспечивает сравнение величин F
о и
F
р,в
результате чего получается - сигнал рассогласования .
Динамические свойства объекта регулирования и элементов САР описываются следующей системой уравнений:
F
р
=кВ
р-
воспринимающий орган
- сравнивающий орган
 -ресивер
-ресивер
 -
сильфон
-
сильфон
 - потенциометрический преобразователь
- потенциометрический преобразователь
 -
усилитель
-
усилитель
 - электромагнитный привод совместно с заслонкой - электромагнитный привод совместно с заслонкой
Выходной сигнал электронного усилителя ограничен уровнем 48 В. Требуемое значение давления Р=500 кПа.
Результатом курсового проектирования должна быть скорректированная система параметры которой соответствуют параметрам, приведённым в задании.
Таблица 1
Введение
Задача синтеза системы автоматического регулирования заключается в выборе такой её структуры, параметров, характеристик и способов их реализации, которые при заданных ограничениях наилучшим образом удовлетворяют требованиям, предъявленным к системе.
Заданная часть проектируемой системы является исходной или нескорректированной САР. Параметры ее основных функциональных элементов известны. В такой постановке задача проектирования сводится к определению корректирующего устройства, обеспечивающего заданные показатели качества системы.
Наиболее простым, наглядным и хорошо разработанным инженерным методом синтеза САР является метод логарифмических амплитудных частотных характеристик (ЛАЧХ). Его идея основана на однозначной связи между переходным процессом в системе и ее ЛАЧХ. Исходя из этого, по заданным динамическим показателям и точности сначала строится желаемая ЛАЧХ, а затем путем графического построения осуществляется приближение к ней частотных характеристик исходной системы. В результате такой процедуры определяется ЛАЧХ корректирующего устройства.
Для синтеза САР необходимо выполнить ряд следующих задач:
1. Построение структурной схемы нескорректированной системы и определение передаточных функций её звеньев.
2. Оценка точности и анализ качества исходной системы (запаса устойчивости и быстродействия) с использованием пакета ControlSystemToolbox.
3. Построение желаемой ЛАЧХ.
4. Определение желаемых передаточных функций разомкнутой и замкнутой системы. Оценка показателей качества желаемой системы с использованием математического пакета МatLab.
5. Синтез последовательного корректирующего устройства (регулятора).
6. Реализация корректирующего устройства в виде аналогового и цифрового регуляторов
7. Оценка точности и качества скорректированной системы с учетом ограничений выходного сигнала регулятора путём моделирования с помощью пакета SIMULINK.
8. Построение и описание функциональной схемы скорректированной системы (с приведением параметров САР и её показателей качества).
1. Построение структурной схемы нескорректированной системы и определение передаточных функций её звеньев
.
По заданной функциональной схеме (рис.1) составим структурную схему исходной системы . Она изображена на рис.2 :
Будем считать , что все звенья системы линейны . Таким образом , в рассматриваемой системе отпадает необходимость линеаризации и можно сразу приступить к определению передаточных функций динамических звеньев на основе их дифференциальных уравнений.
Запишем в общем виде передаточные функции каждого звена системы :
Прямой канал
ПФ сильфона :
ПФ потенциометрического преобразователя : 
ПФ усилителя : 
ПФ электромагнитного привода совместно с заслонкой
Ресивер является одновременно объектом регулирования и возмущающим воздействием , поэтому представим его в виде двух блоков с передаточными функциями :
 ; ;
 ; ;
Обратный канал
ПФ воспринимающего органа :
Передаточная функция двигателя записана в общем виде . Для определения типа сильфона исследуем его на колебательность , проверив следующее условие :  . .
Если оно выполняется , то сильфон является апериодическим звеном второго порядка , если не выполняется – колебательным звеном.
Для этого подставим значения Т 2
и Т1
из таблицы 1 в данное условие :
 отсюда отсюда 
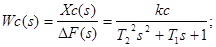
Мы видим , что условие выполняется , значит сильфон является апериодическим звеном второго порядка и его ПФ может быть записана в виде:

Для нахождения коэффициентов  и и  воспользуемся соотношениями воспользуемся соотношениями

Решим систему из двух линейных уравнений :
В результате получим и решим квадратное уравнение:

В итоге получаем :
 ; ; 
Сделаем проверку :
Найдём передаточную функцию разомкнутой системы исходя из передаточных функций её звеньев и структурной схемы нескорректированной системы ( рис.2) ;

Подставим в выражение численные значения коэффициентов и получим следующее :

2. Оценка точности и анализ качества исходной системы
Приведём систему к единичной обратной связи , тогда структурная схема нескорректированной системы приведённой к единичной обратной связи будет иметь вид:
Тогда передаточная функция замкнутой системы принимает вид:

Найдём ошибку системы , величина которой равна 
Ошибка по входу будет равна :

Ошибка по возмущению будет равна :
Общая ошибка будет равна : 
Далее для оценки свойств системы воспользуемся пакетом прикладных программ
ControlSystemToolbox математического пакета MatLab.
Занесём в tf-форме передаточную функцию разомкнутой исходной системы в MatLab , обозначив её через Wr , для этого сначала введём передаточные функции звеньев и найдём их произведение :
>> w1=tf([78],[0.0016,1])
Transfer function:
78
------------
0.0016 s + 1
>> w2=tf([1],[0.3985,1])
Transfer function:
1
------------
0.3985 s + 1
>> w3=tf([1],[0.01,1])
Transfer function:
1
----------
0.01 s + 1
>> w4=tf([1],[0.7,1])
Transfer function:
1
---------
0.7 s + 1
>> Wr=w1*w2*w3*w4
Transfer function:
78
-------------------------------------------------------
4.463e-006 s^4 + 0.003253 s^3 + 0.2917 s^2 + 1.11 s + 1
Далее строим логарифмические амплитудные характеристики :
>> margin(Wr);gridon
Для определения устойчивости замкнутой системы автоматического управления построим годограф Найквиста от разомкнутой системы с помощью средств MatLab.(рис.5)
>> nyquist(Wr);grid on
Точка с координатами (0;-j) охватывается годографом, следовательно исходная система не устойчива.
Чтобы оценить время переходного процесса и относительное перерегулирование , введём в нашу модель единичную обратную связь и построим график переходного процесса замкнутой исходной системы (рис.6)
>> f=tf([1])
Transfer function:
1
>> W=feedback(Wr,f)
Transfer function:
78
--------------------------------------------------------
4.463e-006 s^4 + 0.003253 s^3 + 0.2917 s^2 + 1.11 s + 79
>> step(W);grid on
Из графика (рис.6) видно , что время перехода равно 15 секунд , подобная скорость переходного процесса приемлема , но не желательна .
Относительное перерегулирование составляет приблизительно  , что является слишком большим значением и превышает допустимое по условию задания (σ =5 %). , что является слишком большим значением и превышает допустимое по условию задания (σ =5 %).
Оценив характеристики исходной системы , делаем вывод о том , что система требует доработки в виде дополнительного корректирующего устройства (регулятора)
5. Построение логарифмических амплитудно-частотных характеристик для исходной системы, желаемой и корректирующего звена .
Для построения ЛАЧХ используется стандартная сетка ,. По оси абсцисс откладывается угловая скорость в логарифмическом масштабе , т.е. наносятся отметки , соответствующие  , а около отметок пишется само значение частоты , а около отметок пишется само значение частоты  в рад/с . Выбираем длину , равную 50мм . По оси ординат откладывается модуль в дБ. в рад/с . Выбираем длину , равную 50мм . По оси ординат откладывается модуль в дБ.
Построим для нашей исходной системы так называемую асимптотическую ЛАЧХ ( см. приложение), представляющую собой совокупность отрезков прямых линий снаклонами , кратными величине 20 дБ/дек, а точки перегибов соответствуют десятичным логарифмам частот , равных величинам , обратным постоянным времени из передаточной функции.
Для построения исходной ЛАЧХ будем использовать передаточную функцию


 ; ;  ; ;
 
Начальный уровень исходной ЛАЧХ будет равен :

Для построения желаемой ЛАЧХ необходимо найти желаемый передаточный коэффициент:
 ; ;

Из построенной желаемой ЛАЧХ определяем передаточную функцию разомкнутой желаемой системы :
 , ,

Для построения ЛАЧХ корректирующего звена вычтем из желаемой ЛАЧХ исходную.
Передаточная функция регулятора имеет вид (см. приложение):
 , где , где 
где , ,  ; (см. приложение) ; (см. приложение)

Произведём оценку точности и анализ качества скорректированной системы с помощью математического пакета МatLab.
>> g1=tf([49],[1,0])
Transfer function:
49
--
s
>> g2=tf([1],[0.01,1])
Transfer function:
1
----------
0.01 s + 1
>> g3=tf([1],[0.0016,1])
Transfer function:
1
------------
0.0016 s + 1
>> Gr=g1*g2*g3*g3
Transfer function:
49
-----------------------------------------------
2.56e-008 s^4 + 3.456e-005 s^3 + 0.0132 s^2 + s
>> margin(Gr);gridon
Запас по амплитуде увеличился почти в 9 раз и теперь составляет 17,3 дБ , запас по амплитуде составляет 57,8 градуса .
Введём в систему отрицательную обратную связь и оценим переходный процесс.
>> f=tf([1])
Transfer function:
1
>> G=feedback(Gr,f)
Transfer function:
----------------------------------------------------
2.56e-008 s^4 + 3.456e-005 s^3 + 0.0132 s^2 + s + 49
>> step(G);grid on
Из графика (рис.8)видно , что время перехода равно 0,15 секунды , а перерегулирование составляет примерно  % , что не превышает заданных 5 %. % , что не превышает заданных 5 %.
Проверим систему на устойчивость при помощи построения годографа Найквиста :
>> nyquist(Gr);grid on
Оценив характеристики скорректированной системы , делаем вывод :
сходящийся колебательный процесс (рис.8) и годограф Найквиста (рис.9) , не охватывающий точку (0,-j) свидетельствуют об устойчивости системы.
4. Синтез последовательного корректирующего звена
Структурная схема САУ при последовательной коррекции изображена на рис.10, где приняты следующие обозначения : W(s)-передаточная функция исходной системы ;
Wk(s)- передаточная функция корректирующего устройства .
Полагая , что передаточная функция скорректированной системы Wск(s) равна желаемой передаточной функции Wж(s) , можно записать

Реализация аналогового регулятора на пассивных RC-цепях.
Передаточная функция корректирующего звена имеет вид:

Т.к.  , то данная ПФ может быть реализована при помощи схемы , изображённой на рис.11. , то данная ПФ может быть реализована при помощи схемы , изображённой на рис.11.
Произведём расчёт сопротивлений и ёмкости , а так же коэффициента усиления дополнительного усилителя . Расчёт устройства производится по соотношениям :
  ; ; 
Пусть ёмкость конденсатора равна 10 мкФ ( модель К15П-1)

По таблице номиналов выбираем близкие по значению резисторы модели С1-1 R1
=39кОм , R2
=160Ом

Чтобы сделать коэффициент регулятора равным 2,02 , подберём коэффициент усиления дополнительного усилителя Куд=112.
Найдём постоянные времени с учётом номиналов найденных реальных конденсатора и резисторов :


Таким образом передаточная функция регулятора примет вид :

Реализация активного корректирующего звена на ОУ.
Принципиальная схема регулятора на ОУ приведена на рис.12.
Расчёт устройства производится по соотношениям :
  
Примем R1
=10 кОм , тогда
По таблице номиналов выбираем близкие по значению резисторы модели С1-1 и конденсаторы модели К15П-1 :
R2
= 4,7 кОм ; С2
= 0,33мкФ ; С1
= 39мкФ
Цифровой регулятор может быть получен из передаточной функции корректирующего устройства путём перевода её в дискретную форму с помощью аппроксимации Тустена и последующей записи разностного уравнения .
В схеме изображённой на рис.13 сигнал , поступающий в АЦП (аналого-цифровой преобразователь) преобразуется из аналоговой формы в цифровую ( дискретную) путём квантования непрерывной величины по времени ,затем сигнал поступает в D(z) (цифровая вычислительная машина),где производятся вычисления согласно разностному уравнению , после чего сигнал поступает в ЦАП ( цифровой аналоговый преобразователь), где преобразуется из цифровой в аналоговую форму
Период дискретности примем равным 0,0008с., т.е. Тs=0,0008 c.
>> Wk=tf([0.563479,2.21897,2.02],[0.0016,1,0])
Transfer function:
0.5635 s^2 + 2.219 s + 2.02
---------------------------
0.0016 s^2 + s
>> Wkd=c2d(Wk,0.0008,'tustin')
Transfer function:
282.2 z^2 - 563.5 z + 281.3
---------------------------
z^2 - 1.6 z + 0.6
Samplingtime: 0.0008
Преобразуем функцию в dsp-форму :
>> W=filt([282.2,-563.5,281.3],[1,-1.6,0.6],0.0008)
Transfer function:
282.2 - 563.5 z^-1 + 281.3 z^-2
-------------------------------
1 - 1.6 z^-1 + 0.6 z^-2
Sampling time: 0.0008
Получили передаточную функцию цифрового регулятора :

Теперь можно записать разностное уравнение в общем виде:

перемножив получим следующее:

Отсюда получаем следующее уравнение

Данное уравнение реализуется в виде компьютерной программы , и используется для управления цифровым контроллером ,который в свою очередь реализует коррекцию системы.
Заключение
В результате выполнения курсовой работы была выполнена задача синтеза корректирующего звена для исходной САР.
Для этого были решены следующие задачи: построена структурная схема нескорректированной системы и определены передаточные функции её звеньев, произведена оценка точности и анализ качества исходной системы (запаса устойчивости и быстродействия) с использованием пакета ControlSystemToolbox.
Также была построена желаемая ЛАЧХ, определены желаемые передаточные функции разомкнутой и замкнутой систем, после чего была произведена оценка показателей качества желаемой системы с использованием математического пакета MATLAB и синтез последовательного корректирующего устройства (регулятора), реализация корректирующего устройства в виде аналогового (активная и пассивная коррекции) и цифрового регуляторов , а также построение и описание функциональной схемы скорректированной системы (с приведением параметров САР и её показателей качества).
Физическая схема скорректированной САР приведена на рис. 22.
Спроектированная система автоматического регулирования устойчива и обладает показателями качества ,соответствующими требуемым в задании :перерегулирование  4 % . 4 % .
Список используемой литературы
1. Бесекерский В.А., Попов Е.П. Теория автоматического управления - Изд.. 4-е, перераб. И доп. - СПб, Изд-во «Профессия», 2003
2. Ерофеев А.А. Теория автоматического управления: Учебник для втузов. -2-е изд., перераб. И доп. - СПб.: Политехника, 2003. - 302с: ил.
3. Синтез следящей системы автоматического управления: Метод. Указания к курсовой работе. Сост. В.И. Будин, О.Б. Сигова, - Самара, СамГТУ, 2003.-20с.
4. МедведевВ.С„ ПотёмкинВ.Т.Control System Toolbox. Matlab5 для студентов. - М.: ДИАЛОГ - МИФИ, 1999. - 287 с.
5. Лазарев Ю. Ф. Matlab5. х. - К.: Издательская группа ВНV, 2000. - 384с.
6. Дьяконов В.П. Simulink 4. Специальный справочник. - СПб: Питер, 2002. - 528с: ил.
7. Макаров И.М ., Менский Б.М. Линейные автоматические системы(справочный материал) -2-е изд., -М.: Машиностроение , 1982.-504с.,ил.
8. Ким Д.П. Теория автоматического управления. Т.1. Линейные системы.-
М.: ФИЗМАТЛИТ , 2003.-288 с.
|