| Міністерство освіти і науки України
Полтавський національний технічний університет
імені Юрія Кондратюка
Кафедра автоматики та електропривода
Курсовий проект
з дисципліни
“Електропривод і автоматизація промислових роботів
і маніпуляторів”
на тему:
Визначення параметрів електропривода верстата з ЧПК
з підпорядкованим регулюванням координат
ЕАРМ 502.001.000 КП
Міністерство освіти і науки України
Полтавський національний технічний університет
імені Юрія Кондратюка
Кафедра автоматики та електропривода
Пояснювальна записка
до курсового проекту
з дисципліни
“Електропривод і автоматизація промислових роботів
і маніпуляторів”
на тему:
Визначення параметрів електропривода верстата з ЧПК
з підпорядкованим регулюванням координат
ЕАРМ 502.001.000 ПЗ
Завдання
До виконання курсового проекту з дисципліни
“Електропривод і автоматизація роботів-маніпуляторів”
на тему:
“Визначення параметрів електропривода верстата з ЧПК з підпорядкованим регулюванням координат”
Варіант №1.
Склад курсової роботи
| Найменування розділу
|
Термін виконання
|
| 1. Попередній вибір двигуна і його перевірка
|
25%
|
| 2. Вибір інформаційних елементів системи
|
40%
|
| 3. Розрахунок контуру регулювання струму
|
50%
|
| 4. Розрахунок контуру регулювання швидкості і положення
|
70%
|
| 5. Оформлення пояснювальної записки і креслень
|
100%
|
Завдання видав:
Завдання прийняв:
Вихідні дані
Розрахувати параметри електропривода верстата з ЧПК з підпорядкованим регулюванням координат:
Зусилля різання F
р
= 5000 Н;
Маса виконуючого механізму m
1
= 300
кг;
Маса деталі m
2
= 80
кг;
Коефіцієнт тертя m
= 0,05;
Зусилля попереднього натягу FH
= 500
H
;
Швидкість швидкого ходу Jшв.х
= 0,13 м/с;
Швидкість подачі Jп
= 0,06 м/с;
Прискорення а = 1,3 м/с2
;
Крок гвинта S
= 8 мм.
Зміст
Вступ
1. Технічні вимоги
2. Розрахунок потужності і вибір двигунів при контурно-позиційному керуванні
2.1 Розрахунок потужності навантаження
2.2. Вибір електродвигуна і його перевірка
3. Вибір інформаційних електромеханічних елементів виконавчих систем верстата
3.1 Сельсини і обертові трансформатори
3.2 Вибір датчиків кутової швидкості
3.3. Вибір датчика струму
4. Розрахунок параметрів системи регулювання положення електроприводів подачі
4.1 Визначення параметрів структурної схеми двигуна постійного струму
4.2 Визначення і структурна схема контуру регулювання струму в системі керований перетворювач – двигун
4.3. Розрахунок параметрів контуру регулювання швидкості в системі з підпорядкованим контуром струму
4.4. Визначення параметрів контуру регулювання положення системі з підпорядкованими контурами швидкості і струму
Висновки
Література
Додатки
Вступ
Промислові роботи і маніпулятори – одна із головних частин комплексної програми автоматизації виробництва. Вони вирішують задачу скорочення традиційно ручних операцій у виробництві шляхом автоматизації технологічного процесу.
Сучасні наукові розробки акцентують увагу на автоматизації виробничих процесів і електроприводів, створенні і застосуванні сучасних засобів керування і регулювання, розробці складних промислових роботів , маніпуляторів і систем комплексної механізації, що сприяє значному підвищенню продуктивності праці, допомагає працювати у складних умовах.
У відповідності з вимогами сучасної промисловості розвиток електроприводів іде як у напрямку збільшення потужності, так і в напрямку створення мікроелектроприводів. Широкий діапазон потужностей електродвигунів дозволяє проектувати технічно досконалі і економічно доцільні типи приводів в відповідності з вимогами різноманітних галузей промисловості.
Створення нових апаратів для управління електричними машинами, нових типів автоматичних регуляторів, а також впровадження мікро ЭОМ і різноманітних контролерів наводить до розширення галузей автоматизації, і, як окремий випадок, автоматизації електроприводів роботів і маніпуляторів. Отже доцільність розробки промислових роботів обумовлюється як з економічної, так і з технічної точок зору.
1. Технічні вимоги
Електроприводи промислових роботів подібні до електроприводів металорізальних верстатів, а саме до приводів подачі, тому до них висуваються такі вимоги:
1. Електропривод повинний бути розрахований для роботи в тривалому режимі відповідно до вимог технічних умов;
2. Вал електродвигуна повинний бути пов’язаний з валом тахогенератора за допомогою жорсткої безлюфтової передачі з коефіцієнтом редукції, що дорівнює одиниці;
3. У режимі регулювання частоти обертання електропривод повинний забезпечити роботу у всіх чотирьох квадрантах механічної характеристики при зміні напруги керування у межах ±10 В, мінімальну частоту обертання вала 1 об/хв.
4. Датчики положення, пов’язані з двигуном вимірювальними безлюфтовими передачами, повинні бути використані на повний робочий кут по всіх координатах механізму;
5. Відхилення миттєвої частоти обертання при зміні моменту навантаження в діапазоні 0,25..0,5 не повинно перевищувати від установленої частоти обертання при 0,5×Jдв
;
6. Смуга пропускання електропривода зі зворотнім зв’язком по швидкості повинна бути на менше 20-200 Гц при амплітуді вхідного сигналу 0,1 В;
7. При частоті обертання 1 об/хв., моменті навантаження 0,2×Мном
, зовнішньому моменті інерції 0,5×Jдв
електропривод повинний забезпечувати зупинку вала після зняття керуючої напруги за 0,5 кута повороту вала двигуна;
8. Лінійність статичної характеристики електропривода, вхідна напруга керування, частота обертання двигуна у режимі регулювання не більш 5%
9. У системах ЧП ПР головні електроприводи і проводи подач повинні забезпечувати режими позиціювання, точність позиціювання повинна досягати 1..2 мкм;
10. Відносна нерівномірність руху при мінімальній швидкості Кн
< 0,3;
11. Електроприводи промислових роботів повинні бути реверсивними;
12. Необхідний діапазон регулювання швидкості електроприводів подачі складає 1:10 000;
13. Для зниження динамічних ударів кінематика електроприводу повинна забезпечувати повільність процесів пуску і реверсу
14. Для високої надійності обладнання електропривод повинний мати необхідні види захисту, блокування, сигналізації і діагностики.
2. Розрахунок потужності і вибір двигунів при контурно-позиційному керуванні
2.1 Розрахунок потужності навантаження
Контурно-позиційне керування використовується в приводах подач верстатів і ланок роботів. Відмінною рисою роботи виконавчих двигунів у таких приводах є переважне використання тривалого режиму роботи. У приводах роботів переважає повторно-короткочасний режим роботи, особливо для верстатів із ЧПК. У приводах роботів, які використовуються на виробництві, переважає повторно-короткочасний режим роботи. Оскільки переважним видом приводу виконуючого механізму з контурно-позиційним керуванням є електропривод, то ми обмежимося розрахунком необхідної потужності і вибором електродвигуна для цих пристроїв.
Знайдемо зусилля подачі по керованій осі:

Де:
kp
– коефіцієнт запасу, приймаємо рівним 1,4;
Fp
– зусилля різання вздовж осі, за умовою дорівнює 5000 Н;
m – коефіцієнт тертя, що за умовою дорівнює 0,05 ;
Fн
– зусилля попереднього натягу, що за умовою дорівнює 500 Н;
m1
, m2
– маса деталі і виконавчого органу.

Потужність, яка прикладена до вала виконуючого органу в режимі різання:

Потужність у режимі швидкого ходу:

Таким чином потужність в режимі різання складає 461,2 Вт, а режимі швидкого ходу 97,5 кВт.
2.2 Вибір електродвигуна і його перевірка
Двигун попередньо вибирається за найбільшому значенню потужності в режимі різання чи в режимі швидкого ходу. В нашому випадку це потужність в режимі різання Рріз
= 461,2 Вт.
Потужність вибраного двигуна повинна бут більшою за отриману потужність різання, але не набагато. Виконання цієї рекомендації для високомоментних двигунів постійного струму забезпечує краще узгодження двигуна з виконуючим механізмом у динамічних режимах роботи і зменшуючи число ступеней проміжного редуктору або навіть дозволяє відмовитися від його застосування. Вибираємо двигун, дані якого приведені у таблиці 2.2.1.
Таблиця 2.2.1
Попередній вибір двигуна
| Тип
|
Pном
,
кВт
|
wном
,
рад/с
|
Uном
,
В
|
Мном
,
Н×м
|
Іном,
А
|

|
Rяд
,
Ом
|
Jдв
,
кг×м2
|
Тяд
,
с
|
Тем
,
с
|
| ДК1-5,2-АТ
|
0,52
|
105
|
110
|
5,2
|
6,5
|
5
|
1,35
|
0,0032
|
4,0
|
10
|
У верстатах з ЧПК при довжині переміщення менше 3-4 м використовується передача гвинт-гайка, що має ККД рівний 0,95 при відсутності натягу і 0,85-0,9 при наявності попереднього натягу. Відповідно у нашому випадку приймаємо h = 0,9.
Загальне передавальне число між виконуючим механізмом і двигуном дорівнює:

Де:wд
max
– максимальна швидкість двигуна, яку приймаємо рівну номінальній,
wд
max
= wном
=105 рад/с;
 1/м; 1/м;
Момент на валу двигуна, що розвивається під дією сили різання для передачі гвинт-гайка визначається:
 Н×м Н×м
Момент на валу двигуна від сил тертя складається з моментів тертя в направляючих і з моментів сил від попереднього натягу.
Момент тертя в направляючих визначається виразом :
 Н×м. Н×м.
Момент сил тертя в гвинтовій парі, що виникає в результаті попереднього натягу визначається :
 Н×м Н×м
Момент опору на валу двигуна при робочій подачі визначається таким чином:

Статичний момент (момент опору) на валу двигуна при швидкому ході:

Необхідний динамічний момент на валу двигуна, який він повинен розвивати при розгоні до швидкості швидкого ходу дорівнює :
 ; ;
де Jд
– момент інерції двигуна, = 0,0032 кг×м2
, (коефіцієнт 1,2 враховує приведений момент механічної передачі);
Jвм
– приведений момент інерції виконавчого механізму;
eд
– прискорення вала двигуна.
Приведений момент інерції механізму:
 кг×м2 кг×м2
Прискорення вала двигуна:
 рад/с2 рад/с2
Необхідний динамічний момент на валу двигуна:
 Н×м Н×м
Відповідно, необхідний момент на валу двигуна для розгону до швидкості швидкого ходу дорівнює :
 Н×м. Н×м.
Розраховані значення М1
, М2
і М3
повинні бути меншими за відповідні допустимі моменти двигуна Мдоп1
, Мдоп2
і Мдоп3
:
Мдоп1
= Мдоп2
=1,2× Мн
= 6,24 Н×м;
Мдоп3
= l×Мн
= 5×5,2 = 26 Н×м.
Двигун обрано правильно, якщо виконуються всі умови:
М1
< М1доп
;7,152 < 6,24не виконується;
М2
< М2доп
;0,273 < 6,24виконується;
М3
< М3доп
;4,917 < 26 виконується.
Даний двигун вибрано неправильно, вибираємо інший двигун, наступної стандартної потужності за каталогом, дані якого приведені нижче:
Таблиця 2.2.2
Попередній вибір двигуна
| Тип
|
Pном
,
кВт
|
wном
,
рад/с
|
Uном
,
В
|
Мном
,
Н×м
|
Іном,
А
|

|
Rяд
,
Ом
|
Jдв
,
кг×м2
|
Тяд
,
с
|
Тем
,
с
|
| ПБВ 100М
|
0,75
|
105
|
52
|
7,2
|
18
|
10
|
0,22
|
0,01
|
0,063
|
0,05
|
Виконуємо перерахунок параметрів :
ККД знову приймаємо рівним h = 0,9
Загальне передавальне число між виконуючим механізмом і двигуном дорівнює:
 1/м; 1/м;
Момент на валу двигуна, що розвивається під дією сили різання для передачі гвинт-гайка визначається:
 Н×м Н×м
Момент тертя в направляючих визначається виразом :
 Н×м. Н×м.
Момент сил тертя в гвинтовій парі, що виникає в результаті попереднього натягу визначається :
 Н×м Н×м
Момент опору на валу двигуна при робочій подачі визначається таким чином:

Статичний момент (момент опору) на валу двигуна при швидкому ході:

Необхідний динамічний момент на валу двигуна, який він повинен розвивати при розгоні до швидкості швидкого ходу дорівнює :
 ; ;
де Jд
– момент інерції двигуна, = 0,01 кг×м2
, (коефіцієнт 1,2 враховує приведений момент механічної передачі);
Приведений момент інерції механізму:
 кг×м2 кг×м2
Прискорення вала двигуна:
рад/с2
Необхідний динамічний момент на валу двигуна:
 Н×м Н×м
Відповідно, необхідний момент на валу двигуна для розгону до швидкості швидкого ходу дорівнює :
 Н×м. Н×м.
Розраховані значення М1
, М2
і М3
повинні бути меншими за відповідні допустимі моменти двигуна Мдоп1
, Мдоп2
і Мдоп3
:
Мдоп1
= Мдоп2
= 1,2×Мн
= 8,64 Н×м;
Мдоп3
= l×Мн
= 10×7,2 = 72 Н×м.
Двигун обрано правильно, якщо виконуються всі умови:
М1
< М1доп
;7,152 < 8,64виконується;
М2
< М2доп
;0,273 < 8,64виконується;
М3
< М3доп
;13,485 < 26 виконується.
Отже двигун вибрано правильно.
3.
Вибір інформаційних електромеханічних елементів виконавчих систем верстата
Наступний етап роботи передбачає вибір інформаційних електромеханічних елементів, до яких відносяться датчики положення вихідного вала редуктора і виконавчого механізму (сельсини, що обертаються трансформатори), датчики кутової швидкості (тахогенератори) і датчики струму (вимірювальні шунти і датчики Холу).
Вибір типу датчика визначається вимогами по точності системи електропривода, конструктивними особливостями механічної системи верстата, умовами експлуатації.
3.1 Сельсини і обертові трансформатори
У якості датчиків положення широке застосування одержали пристрої трансформаторної синхронної передачі на електричних індукційних електричних машинах типу сельсинів і обертових трансформаторів. Схеми на обертових трансформаторах забезпечують більш точне перетворення кута розузгодження. Частіше всього вимір здійснюється за допомогою двох обертових трансформаторів включених по трансформаторній схемі, де виробляється напруга розузгодження. Параметри обертового трансформатора наведені у таблиці 3.1.1.
Таблиця 3.1.1
Вибір обертових трансформаторів
| Тип
|
Частота
F, Гц
|
Коефіцієнт трансформації
kт
|
Номінальна напруга
U, В
|
Зсув фаз
|
| ВТ-5
|
400
|
0,96
|
40
|
1-40
|

При розгляді нормального режиму роботи обертового трансформатора можна обмежитися робочою зоною ±10°, у межах якої характеристика лінійна і володіє найбільшою крутизною.
Відповідно коефіцієнт передачі датчика положення дорівнює :
Кдп
= 38,4 В/град.
Будуємо статичну характеристику обертового трансформатора згідно наведених вище співвідношень.
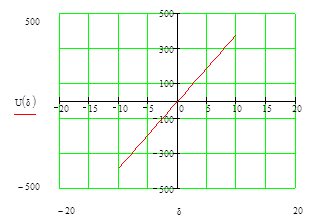
Рис. 1. Статична характеристика обертового трансформатора ВТ-5
Таким чином в якості датчика положення будемо застосовувати обертовий трансформатор типу ВТ-5.
3.2 Вибір датчиків кутової швидкості
У якості датчиків кутової швидкості будемо використовувати тахогенератор.
При виборі тахогенератора необхідно, щоб виконувалась умова:
nдв
< nтах.ген. макс
Так як

то отримуємо
 об/хв. об/хв.
Вибираємо тахогенератор з наступними даними:
Таблиця 3.2.1
Параметри датчика кутової швидкості
| Тип
|
Uзб
,
В
|
Ізб
,
А
|
ктг
,

|
Rя
,
Ом
|
nmax
,
об/хв
|
m,
кг
|
Jтг
,
кг×м2
|
Імакс
,
А
|
| ТД-101
|
110
|
0,065
|
0,021
|
330
|
1500
|
0,7
|
62×10-7
|
0,1
|
Максимальна напруга на тахогенераторі:
 В В
Отже вибраний тахогенератор задовольняє всім умовам.
3.3 Вибір датчика струму
У системах керування електроприводами верстата сигнали, пропорційні струму, знімаються із шунтів, трансформаторів струму. Останнім часом у якості датчиків струму ширше використовуються прилади, засновані на ефекті Холу. Якщо в якості датчика струму обрано шунт, то в подальших розрахунках варто використовувати його коефіцієнт передачі, рівній 1,5 мВ/А, тобто шунт розрахований на номінальний струм у 50 А , має падіння напруги на опорі 75 мВ.
Вибираємо датчик, заснований на ефекті Холу, коефіцієнт передачі якого наводимо в таблиці 3.3.1.
Таблиця 3.3.1
Параметри датчика струму
| Тип датчика
|
Коефіцієнт передачі Кдс
|
| ДХГ-2
|
3,5
|
4. Розрахунок параметрів системи регулювання положення електроприводів подачі
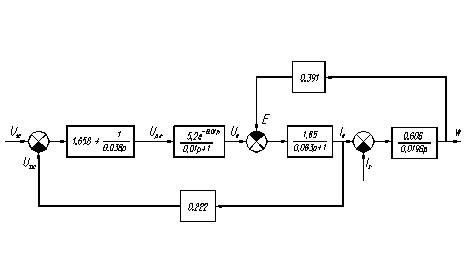
Розрахунок параметрів системи регулювання положення електропривода верстата з підпорядкованими контурами швидкості, струму і положення проводяться на основі методу послідовної корекції. Розрахунок починаємо з визначення параметрів структурної схеми ДПС.
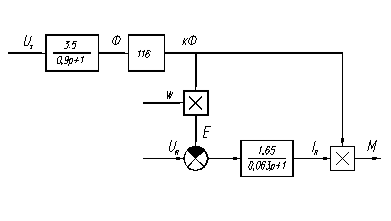
4.1 Визначення параметрів структурної схеми
двигуна постійного струму
Для обраного двигуна складемо структурну схему на основі рівнянь:
Де :Та
– стала часу якоря;
Тз
– стала часу ланцюга збудження
кФ – коефіцієнт зв’язку між потоком і струмом збудження;
Ra
S
– активний сумарний опір якоря.
Де :Rдж.жив
– опір джерела живлення (трансформатора)
Rтр
– опір обмоток трансформатора, приведений до ланцюга
випрямленого струму, Ом;
Rа
– опір, за рахунок перекриття анодних струмів, Ом;
U2л
– вторинна лінійна напруга трансформатора.

Uном
– номінальна напруга двигуна. Uном
= 52 В.
ka
– коефіцієнт запасу, що враховує неповне відкриття вентилів при максимальному сигналі. Приймаємо рівним 1,2.
kе
– відношення напруги вторинної обмотки силового трансформатора до середнього значення випрямленої напруги. Приймаємо рівним 0,857.
kмережі
– коефіцієнт запасу по напрузі, який враховує можливе зниження напруги. Приймаємо рівним 1,15.
kR
– коефіцієнт запасу, що враховує падіння напруги в вентилях і обмотках трансформатора, а також наявності кутів комутації. Приймаємо рівним 1,06.
І2
– струм вторинної обмотки трансформатора.
І2
= Кі
× К2
× Іяном
Кі
– коефіцієнт прямокутності струму, що враховує відхилення форму струму від прямокутної. Приймаємо рівним 1,1.
К2
– коефіцієнт, рівний відношенню діючого значення лінійного струму вторинної обмотки силового трансформатора до середнього значення випрямленого струму. Приймаємо рівним 0,578.
Таким чином:
 В В

 Ом Ом
 Ом Ом
Rз
S
– активний сумарний опір обмотки збудження.
Е – ЕРС двигуна, яка знаходиться як добуток кутової швидкості двигуна на коефіцієнт зв’язку між потоком і струмом збудження.

Індуктивність якірного кола може бути визначена з виразу:
Де: k – коефіцієнт компенсації, який лежить у межах 8..12.
Приймаємо k=10; 2р – число полюсів, керуючись [1] ця величина рівна 2. Отже:
 Гн Гн
Загальна індуктивність якірного кола має вигляд

Де Lдж.жив
– індуктивність джерела живлення (трансформатора).
Значення електромеханічної сталої двигуна Та
наведено у таблиці параметрів вибраного двигуна – таблиця 2.2.2
Та
= 0,063 с.
Знайдемо кФ, виходячи із рівняння:

Отже ЕРС двигуна дорівнює:
 В В
Статична електромеханічна характеристика двигуна будується на основі виразу:

Характеристика наведена на рисунку 2.
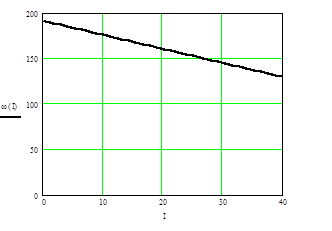
Рис 2. Статична електромеханічна характеристика двигуна.
Структурна схема двигуна приведена в додатках
Дані про ланцюг збудження розраховуємо наближено із рівнянь паралельного збудження :
 Ом.Uз.ном
= Uдв.ном
= 52 В. Ом.Uз.ном
= Uдв.ном
= 52 В.
 А. А.
Відповідно до параметрів двигуна :кф
» 280 Вб/А;
Тз
= 0,9 с.
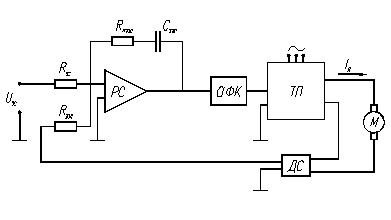
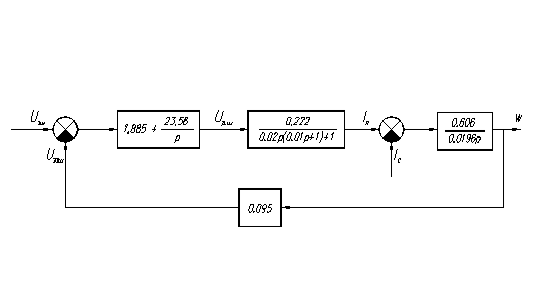
4.2 Визначення і структурна схема контуру регулювання струму в системі керований перетворювач – двигун
Визначимо параметри структурної схеми контуру регулювання струму. Для цього спочатку визначимо електромеханічну сталу часу регулювання:
JS
– сумарний момент інерції двигуна, тахогенератора і виконуючого механізму маніпулятора.
 кг×м2 кг×м2
 с с
Передавальна функція об’єкта регулювання з урахуванням сталої часу тиристорного перетворювача tтп
і сталої часу інерційного фільтру tф
у системі СІФК, які є некомпенсованими і складають:

має вигляд:
Де Ктп
– коефіцієнт підсилення тиристорного перетворювача, який визначається:

Де Uк.мах
– максимальне значення напруги керування тиристорним перетворювачем. Приймаємо Uк.мах
= 10 В.
Таким чином передавальна функція об'єкта регулювання має вигляд :
В даному випадку об'єктом регулювання виступає лише контур регулювання струму, а не вся система.
З огляду на реальні співвідношення Тm
і Та
в результаті послідовної корекції отримуємо передавальну функцію розімкнутого контуру:
Коефіцієнт зворотного зв’язку визначається так:
Де Uзс.мах
– максимальне значення напруги задання струму, приймаємо 10 В.
В даному випадку нам важливо, щоб контур регулювання струму мав підвищену точність і виключав статичну похибку за збурюванням. Відповідно цим властивостям відповідають настройки технічного оптимуму
. Швидкодія контуру визначається постійною ас
, яка дорівнює 2, при настроюванні на технічний оптимум. Таким чином передавальна функція розімкнутого контуру запишеться так:

Передавальна функція регулятора струму визначається так :
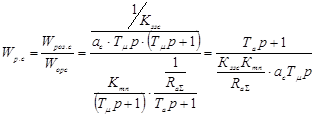
 , ,
Де Тіс
– стала часу контуру регулювання струму :


Таким чином ми отримали ПІ-регулятор струму, налагоджений на технічний оптимум.
Визначимо параметри регулятора струму.
Приймемо Сззс
= 8,2 мкФ. Тоді:
 ; ;
 ; ;
Де Rпззс
– опір у ланцюзі зворотного зв'язку ПІ-регулятора струму.
Rззс
= Rзс
×Кдс
/Кззс
= 4,634×3,5/0,222 = 73,059 кОм.
Кдс
– коефіцієнт передачі датчика струму.
Схема регулятора струму наведена в додатках.
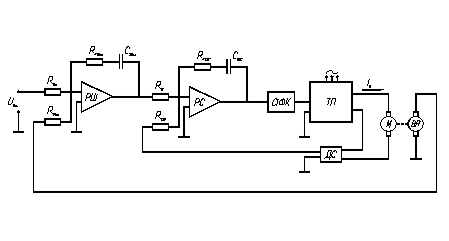
4.3 Розрахунок параметрів контуру регулювання швидкості в системі з підпорядкованим контуром струму
Функціональна і структурна схеми контуру регулювання швидкості наведені в додатках.
Передавальна функція замкнутого контуру, з урахуванням вище розрахованих параметрів, визначається так :

У структурній схемі струмів контур і виконавчий механізм складають об'єкт регулювання для контуру швидкості
Для досягнення підвищеної швидкодії контуру регулювання швидкості, налагоджуємо його на симетричний оптимум.
При цьому в якості регулятора швидкості застосовуємо ПІ-регулятор, передавальна функція якого має вигляд
 ; ;
При стандартній настройці на симетричний оптимум регулятора швидкості приймаємо :
Тр
.
ш
= 8×Тm
= 8×0,01 = 0,08 с.
Кр.ш
=  . .
Деаш
– швидкодія контуру регулювання швидкості (значна).
Кззш
– коефіцієнт зворотного зв'язку за швидкістю :
(Приймаємо Uзш.ном
=10 В.)
 ; ;
 ; ;
Кр.ш
=  ; ;
 . .
Значення пасивних елементів зворотного зв’язку знаходимо із співвідношень :
Трш
= Rзш
×Сззш
;ТМ
= Rпззш
×Сззш;
Де Rпззш
– опір у ланцюзі зворотного зв'язку ПІ-регулятора швидкості.
Приймаємо Сззш
= 8,2 мкФ, тоді
 кОм; кОм;
 кОм; кОм;
 кОм. кОм.
Через мале перерегулювання (4,3%) перехідні процеси оптимізованого контуру струму близькі до аперіодичного і тому передавальна функція має вигляд більш простої передавальної функції аперіодичної ланки:

У цьому випадку передавальна функція розімкненого контуру швидкості має вигляд:



Регулятор швидкості компенсував велику сталу часу ТМ
і динамічні властивості контуру швидкості визначаються лише меншою сталою часу Тm
. Передавальна функція замкненого контуру швидкості має вигляд :


Наявність форсуючої ланки в передавальній функції приводить до великого пере регулювання, яке може досягати 43%. Пере регулювання можна зменшити до 8%, якщо на вхід оптимізованого контуру швидкості додати аперіодичний фільтр зі сталою часу Тф
= 8Тm
, що здатний компенсувати форсуючу ланку в передавальній функції. Тоді передавальна функція замкненого контуру швидкості отримає вигляд :

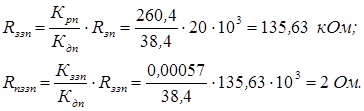
Механічна характеристика синтезованого приводу зображена на рис. 3:

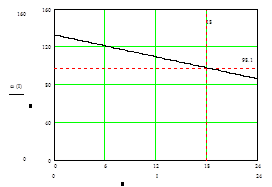
Рис. 3. Електромеханічна характеристика синтезованого електроприводу
Структурна схема контуру регулювання швидкості наведена в додатках
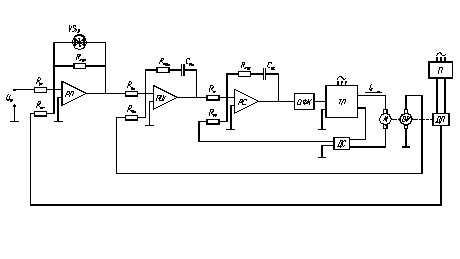
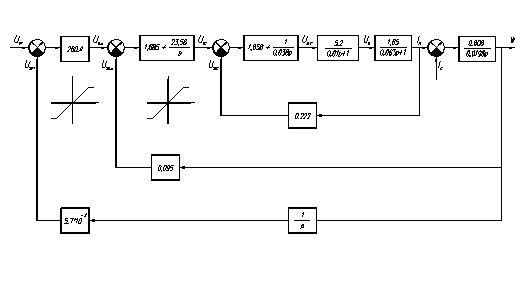
4.4 Визначення параметрів контуру регулювання положення системі з підпорядкованими контурами швидкості і струму
В якості об’єкта регулювання положення приймається двократно інтегруюча система регулювання швидкості в системі керований перетворювач – двигун. Необхідно доповнити її інтегруванням швидкості для одержання переміщення і ввести зворотній зв¢язок за положенням. Утворюється трьох контурна система регулювання положення. Передавальна функція об’єкта регулювання положення має вигляд:


Необхідна передавальна функція розімкнутого контуру регулювання положення визначається за формулою:
Де : ап
– коефіцієнт швидкодії контуру, який приймається рівним 4.
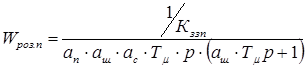
Кззп
– коефіцієнт підсилення каналу зворотного зв¢язку за положенням.
 м/рад. м/рад.
Де іп
– передавальне число між виконуючим механізмом і двигуном на
робочій подачі.
 . .
Ми бачимо, що для досягнення бажаної передавальної функції контуру положення необхідно знехтувати доданками  у виразі для передавальної функції об'єкта регулювання положенням. Тоді ми отримаємо П-регулятор положення такого вигляду : у виразі для передавальної функції об'єкта регулювання положенням. Тоді ми отримаємо П-регулятор положення такого вигляду :


Розрахуємо параметри регулятора положення. Для цього задамо необхідні опори. Значення опору Rзп
повинно бути не менше 10-15 кОм. Усі інші опори розраховані нижче:
Rзп
= 20 кОм
Де Кдп
– коефіцієнт передачі датчика положення. (Див. вище розділ 3.1.)
Напругу пробою стабілітронів, увімкнених у зворотні зв'язки регуляторів для обмеження вихідної напруги, приймаємо рівним максимальній вхідній напрузі приведених в схемах підсилювачів постійного струму, тобто Uc
т
= 10 В.
Структурна схема контуру регулювання положення знаходиться в додатках.
Висновки
Таким чином при розрахунку електропривода верстата з ЧПК необхідно виходити із основних вимог проектування електроприводів подачі верстатів, які перераховані у першому розділі.
Застосована методика проектування трьохконтурної системи з підпорядкованим керуванням координат станка є
· точною
, завдяки ПІ-регулятору струму, налагодженому на технічний оптимум (похибка не перевищує 8%);
· швидкодіючою,
завдяки ПІ-регулятору швидкості, нала-годженому на симетричний оптимум (швидкодія контуру аш
=8);
· високопозиційною,
завдяки П-регулятору положення (коефіцієнт передачі Кззп
= 0,00057 м/рад.)
При цьому досягнуті найкращі показники керування: забезпечений діапазон регулювання швидкості обертання двигуна, лінійність статичної характеристики електропривода, стійкість системи автоматичного керування.
Виконання вказаних розрахунків грунтується на використанні нормативної технічної документації, початкових, довідникових, нормативних, літературних та інших даних, результати яких відображені у курсовій роботі.
Література
1. Методичні вказівки до виконання курсового проекту з дисципліни “Електропривод і автоматизація промислових роботів і маніпуляторів” для студентів спеціальності 7.092203 “Електропривод та автоматизація промислових установок”/ Шульга О. В. – ПДТУ, 1996 р. – 28 с.
2. Гусев И.Г. Устройства числового программного управления: Учебное пособие для энергетических ВУЗов, – М.: Высшая школа, 1986 г.
3. Ильин О.П. Системы программного управления производственными установками и робототехническими комплексами: Учебное пособие для ВУЗов, – М.: Высшая школа, 1988 г.
Додатки

| Форм.
|
Позначення
|
Найменування
|
Кільк.
|
Прим.
|
| Відомість курсового проекту
|
| А4
|
ЕАРМ 502.001.000 ТЗ
|
Технічне завдання
|
1
|
| А4
|
ЕАРМ 502.001.000 ПЗ
|
Пояснювальна записка
|
23
|
| А4
|
ЕАРМ 502.001.001 Е1
|
Схема структурна ДПС
|
1
|
| А4
|
ЕАРМ 502.001.002 Е1
|
Схема структурна ДПС з постійним
|
1
|
| магнітним потоком
|
| А4
|
ЕАРМ 502.001.003 Е2
|
Схема функціональна контуру
|
1
|
| регулювання струму
|
| А4
|
ЕАРМ 502.001.004 Е2
|
Схема функціональна контуру
|
1
|
| регулювання швидкості
|
| А4
|
ЕАРМ 502.001.005 Е2
|
Схема функціональна контуру
|
1
|
| регулювання положення
|
| А4
|
ЕАРМ 502.001.006 Е1
|
Схема структурна контуру
|
1
|
| регулювання струму в системі ТП-Д
|
| А4
|
ЕАРМ 502.001.007 Е1
|
Схема структурна контуру
|
1
|
| регулювання швидкості
|
| А4
|
ЕАРМ 502.001.008 Е1
|
Схема структурна контуру
|
1
|
| регулювання положення
|
| Зм
|
Лист
|
№ докум.
|
Підпис
|
Дата
|
Виконав
|
Відомість курсового проекту
|
Літ.
|
Лист
|
Листів
|
Перевір
|
н
|
1
|
1
|
| Н.контр
|
| Затв.
|
| Форм
|
Позначення
|
Найменування
|
Кільк
|
Прим.
|
| М
|
ПБВ 100-М
|
1
|
0,75 кВт
|
| ТП
|
ТП ТС 1,0
|
1
|
1,0 кВт
|
| СІФК
|
ТСА 160А
|
1
|
160 А
|
| ДС
|
ДХГ-2
|
1
|
кт
= 3,5
|
| BR
|
ТД-101
|
1
|
ктг
= 0,021
|
| ДП
|
ВТ-5
|
1
|
кт
= 0,96
|
| РС
|
К153УД5А
|
1
|
Umax
= 20 B
|
| РШ
|
К153УД5А
|
1
|
Umax
= 20 B
|
| РП
|
К140УД8
|
1
|
Umax
= 20 B
|
| Rзс
|
МЛТ-50
|
1
|
4,7 кОм
|
| Rззс
|
МЛТ-100
|
1
|
73 кОм
|
| Rпззс
|
МЛТ-50
|
1
|
7,8 кОм
|
| Rзш
|
МЛТ-50
|
1
|
10 кОм
|
| Rззш
|
МЛТ-5
|
1
|
2,2 кОм
|
| Rпззш
|
МЛТ-50
|
1
|
6 кОм
|
| Rзп
|
МЛТ-50
|
1
|
20 кОм
|
| Rззп
|
МЛТ-200
|
1
|
136 кОм
|
| Rпззп
|
МЛТ-5
|
1
|
2 Ом
|
| Сззс
|
0,01 мк
|
1
|
8,2 мкФ
|
| Сззш
|
0,01 мк
|
1
|
8,2 мкФ
|
| VS1,2
|
КД 522Б
|
2
|
Umax
= 40 B
|
ЕАРМ 502.001.000 СП
|
| Зм.
|
Лист
|
№ докум.
|
Підпис
|
Дата
|
Виконав
|
Специфікація
|
Літ.
|
Лист
|
Листів
|
Перевір.
|
н
|
1
|
1
|
| Н. контр.
|
| Затв.
|
|