| 1. Введение
Из числа различных видов современных электрических машин самой распространённой в наши дни является асинхронная бесколлекторная машина, применяемая обычно в качестве двигателя.
Асинхронная машина – это машина, в которой при работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости поля. Она была изобретена М. О. Доливо – Добровольским в 1888 г., но до настоящего времени сохранила ту простую форму, которую ей придал русский изобретатель.
Причины исключительно широкого распространения асинхронного двигателя – его простота и дешевизна. Можно сказать, что в основном асинхронная машина состоит из трёх неподвижных катушек (точнее, обмоток), размещённых на общем сердечнике, и помещенной между ними четвёртой, вращающейся катушки. В машине отсутствуют какие-либо легко повреждающиеся или быстро изнашивающиеся части (например, коллектор).
Асинхронные машины малой мощности часто выполняются однофазными для устройств, питающихся от двухпроводной сети. Такие машины находят широкое применение в бытовой технике.
Общий недостаток асинхронных машин – это относительная сложность и неэкономичность регулирования их режимов работы.
Представление механической части электропривода 2-массовой системой даёт наиболее полное представление о динамических процессах, происходящих в реальном приводе, т. к. даже сложные механические системы, связанные с приводом, сводятся к 2-массовой или 3-массовой системам.
2. Исходные данные
Моделируемая машина – асинхронный электродвигатель с короткозамкнутым ротором типа 4А160S4У3
Справочные данные:
Мощность АД, Pn
(кВт)18.5
Число пар полюсов 2
К.П.Д. η (%)89.5
сosφ0.88
Номинальное скольжение Sn
(%)2.2
Номинальная частота f1(Гц) 50, Un
ф
(В)220
Момент инерции ротора Jд.р.
.0,13
Параметры Т-образной схемы замещения двигателя (в относительных единицах):
Активное сопротивление обмотки статора Rs
= 0.042
Индуктивное сопротивление рассеяния обмотки статора Xs
= 0.085
Приведённое активное сопротивление обмотки ротора Rr
'
=
0.024
Приведённое индуктивное сопротивление рассеяния обмотки ротора Xr
’
= 0.13
Индуктивное сопротивление магнитной цепи Xµ
= 4.3
3. Обработка исходных данных для моделирования
Угловая скорость вращения магнитного поля:
ω0
= 2×π×f1
/p = 2×π×50/2 = 157 рад/с
Номинальная угловая скорость ротора определяется на основе выражения скольжения:
Sн
= ( ω0
- ωн
)/ ω0
, откуда
ωн
= ω0
× (1- Sн
) = 157× (1-0.022) =153.546 рад/с
Номинальный момент двигателя:
Мн
= Рн
/ ωн
= 18500/153.546 = 120,485 Н×м
Номинальный ток двигателя определяется из выражения потребляемой мощности:
Р1
=3×Uнф
×Iнф
×cosj.
Потребляемая мощность, в свою очередь равна:
Р1=Рн/h = 3000/0.895 = 20670,39 Вт , тогда
Iнф
= Р1
/(3×Uнф
×cosj.) = 20670,39 /(3×220×0.88) = 35,589 A
Номинальное сопротивление двигателя, на которое необходимо умножить активные и индуктивные сопротивления в относительных единицах, чтобы получить параметры двигателя в абсолютных единицах (Ом):
Zн
= Uнф
/ Iнф
= 220/35,589 = 6,18 Ом
Пересчитаем параметры Т – образной схемы замещения двигателя из относительных единиц в абсолютные.
Активное сопротивление обмотки статора:
Rs
= 0.042×6,18 = 0,2596 Ом
Приведённое активное сопротивление обмотки ротора:
Rr
'
=
0.024×6,18 = 0,148358 Ом
Собственная индуктивность статора:
Lσs = Xs
/2×π×f1
= 0.085×6,18 /2×π×50 = 0.00167 Гн
Собственная индуктивность ротора:
Lσr = Xr
’
/2×π×f1
= 0.13×6,18/2×π×50 = 0.0025573 Гн
Взаимная индуктивность:
Lm = Xµ
/2×π×f1
= 4.3×6,18/2×π×50 = 0.084587 Гн
Индуктивность обмотки статора:
L1
= Lm + Lσs = 0.084587 + 0.00167 = 0.086257 Гн
Индуктивность обмотки ротора:
L2
= Lm + Lσr = 0.084587 + 0.0025573 = 0.0871443 Гн
3. Разработка модели
Математическая модель асинхронного двигателя в форме Коши (в системе координат u-v) имеет следующий вид:
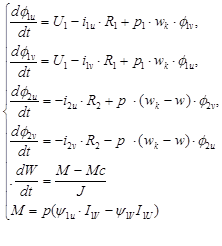
Пуск двигателя будем выполнять на холостом ходу, и после выхода АД на синхронную скорость нагрузим номинальным моментом.
Момент инерции привода подобран таким образом, чтобы в динамической кривой скорости вращения двигателя ω (t) не было колебаний при выходе на установившийся режим.
Блок-схема прямого пуска асинхронного двигателя с использованием пакета
Power
System
Blockset

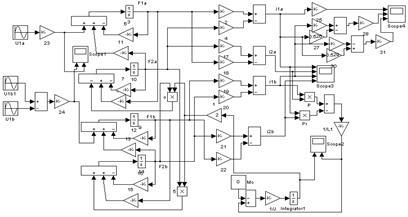
Схема прямого пуска асинхронного двигателя в осях
XY
.
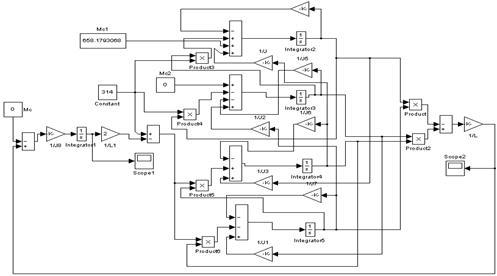
Схема прямого пуска асинхронного двигателя в осях  . .
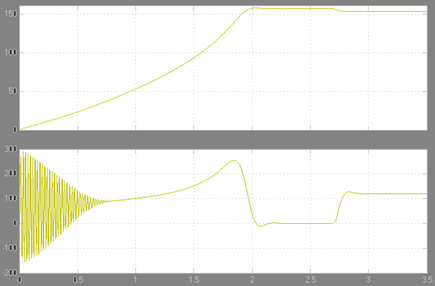
4. Результаты моделирования
В результате моделирования нами получены следующие зависимости угловой скорости вращения якоря и момента:
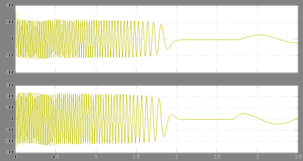
Зависимость тока статора от времени в неподвижной (связанной со статором) системе координат имеет следующий вид (для фазы А):
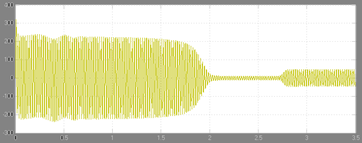
Зависимость тока статора от времени в неподвижной (связанной со статором) системе координат под номинальной нагрузкой.
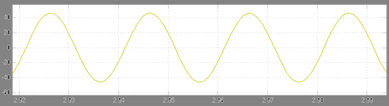
Зависимость тока статора от времени в неподвижной (связанной со статором) системе координат на холостом ходу.
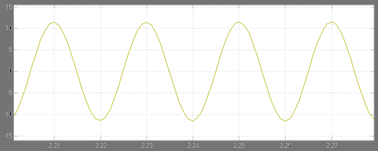
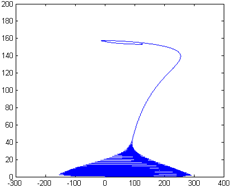
График зависимости w=f(M) имеет следующий вид:
Зависимость тока ротора от времени в вращающейся со скоростью ротора (связанной с ротором) системе координат имеет следующий вид (d q):
5. Адекватность модели прямого пуска асинхронного двигателя
Проведём анализ адекватности разработанной нами модели прямого пуска асинхронного двигателя на основе расчета процентного совпадения параметров номинального режима, полученных при моделировании и рассчитанных по справочным данным.
В установившемся режиме при нагрузке на валу двигателя, соответствующей номинальной, значение угловой скорости будет равно:
В результате моделирования получено значение:

Определим расхождение сравниваемых параметров в процентах:

Такое расхождение результатов моделирования и номинальных данных двигателя даёт основание полагать, что разработанная нами модель адекватно отражает прямой пуск реального асинхронного двигателя.
По результатам моделирования определить номинальный ток, номинальную скорость, ток холостого хода, пусковой ток, кратность пускового тока, кратность пускового момента.
Номинальный ток равен Iном=32,6 А
Ток холостого хода Iх.х.=8,13 А
Пусковой ток Iп=166 А
Кратность пускового тока
Кратность пускового момента
Я ознакомился с методом моделирования прямого пуска АД с короткозамкнутым ротором на основе обобщённой машины.
|