| Содержание
1. Анализ и описание системы «электропривод – рабочая машина»
1.1 Количественная оценка вектора состояния или тахограммы требуемого процесса движения
1.2 Количественная оценка моментов и сил сопротивления
1.3 Составление расчетной схемы механической части электропривода
1.4 Построение нагрузочной диаграммы и механической характеристики рабочей машины
2. Анализ и описание системы «электропривод - сеть» и «электропривод — оператор»
3.Выбор принципиальных решений
3.1 Построение механической части электропривода
3.2 Выбор типа привода (двигателя)
3.3 Выбор способа регулирования координат
3.4 Оценка и сравнение выбранных вариантов
4. Расчет силового электропривода
4.1 Расчет параметров и выбор двигателя
4.2 Расчет параметров и выбор силового преобразователя
5. Расчет статических механических и электромеханических характеристик двигателя и привода
6. Расчет переходных процессов в электроприводе за цикл работы
7. Проверка правильности расчета мощности и окончательный выбор двигателя
1. Анализ и описание системы «электропривод – рабочая машина»
1.1 Количественная оценка вектора состояния или тахограммы требуемого процесса движения
Скорость электропривода во время правки и на холостом ходу, которая выбирается из диапазона скоростей от 1,45 м/с до 2,4 м/с.
По описанию технологического процесса [ 1] , можно построить тахограмму требуемого процесса движения. По требованию процесса цикл работы происходит при постоянной скорости. Пуск и переход на другую скорость не входит в цикл работы. Тахограмма показана на рисунке 1 .
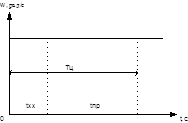
Рисунок 1- Тахограмма рабочего процесса
Определим значение минимальной угловой скорости двигателя исходя из тахограммы и условий задания:
 (1) (1)
где i - передаточное число редуктора;
v1
- минимальная скорость передвижения листа;
R - радиус рабочих и опорных роликов.
Максимальная угловая скорость двигателя:
 (2) (2)
где v2
- максимальная скорость передвижения листа.
Рассмотрим два случая:
1)прогонка максимальной длины листа с минимальной скоростью;
2) прогонка минимальной длины листа с максимальной скоростью.
Первый случай.
Время прокатки:
 (3) (3)
где Lmax
- максимальная длина листа.
По условию задания ПВ механизма - 75%. Определим время цикла:
 (4) (4)
Время холостого хода:
 (5) (5)
Второй случай.
 (6) (6)

Будем выбирать двигатель с расчётным режимом S1 т.к. за время цикла работы привода отсутствуют паузы.
1.2 Количественная оценка моментов и сил сопротивления
Зная общий суммарный момент при максимальной нагрузке, отнесенный к рабочим валкам, можно определить статический момент, приведенный к валу:
 (7) (7)
где  - КПД механизма (считается неизменным). - КПД механизма (считается неизменным).
Момент холостого хода, приведенный к валу двигателя, задан и равен:
Момент на валу двигателя во время правки определяется по формуле:
 (8) (8)
1.3 Составление расчетной схемы механической части электропривода
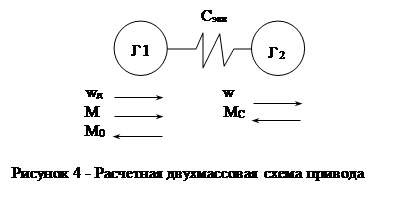
Для теоретического исследования реальную механическую часть электропривода (рисунок 2) заменяем динамически эквивалентной приведенной расчётной схемой, состоящей из сосредоточенных инерционных элементов, соединённых между собой упругими связями, и обладающей таким же энергетическим запасом, как и реальная исходная система привода. Параметрами эквивалентной приведенной расчётной схемы являются суммарные приведенные моменты инерции масс, образованные приведенными массами, связи между которыми приняты жёсткими, и эквивалентные приведенные жёсткости упругих механических связей.
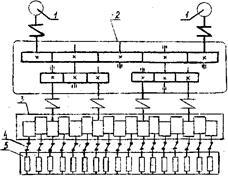
Рисунок 2 - Кинематическая схема механизма
Электропривод состоит из следующих кинематических элементов:
1 - электродвигатель;
2 - редуктор;
3 - шестерная клеть;
4 - универсальные шпиндели;
5 - рабочая клеть.
Момент инерции муфт между двигателем и редуктором равен 16 кг*м2
,момент инерции муфт между редуктором и шестерной клетью равен 40,2 кг*м2
, одного шпинделя - 0,003 кг*м2
. Момент инерции редуктора, приведенный к валу двигателя, равен 30% от Jдв
.
Количество шпинделей -17, количество рабочих роликов -17, опорных - 15.
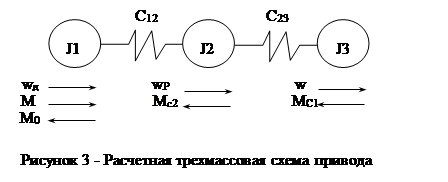
Механическая часть электропривода листоправильного стана представляет собой трехмассовую систему, состоящую из роторов (якорей) двигателей с полумуфтами на валах - J1, редуктора с полумуфтами на его входном и выходном валах - J2 и рабочий орган машины, также с полумуфтами на входном валу - J3. Упругими звеньями данной системы являются жесткости соединительных муфт С12
и С23
.
Рассчитаем параметры полученной схемы.
Момент инерции первой массы:
 (9) (9)
где J пм1
- момент инерции полумуфт на валах двигателей. пм1
- момент инерции полумуфт на валах двигателей.
Момент инерции редуктора с полумуфтами на его входном и выходном валах (учитывая, что момент инерции редуктора, приведенный к валу двигателя, равен 30% от Jдв
) равен:
 (10) (10)
где Jпм2
- момент инерции полумуфты на выходном вале редуктора.
Момент инерции рабочего органа привода с полумуфтами на входном валу, приведенный к валу двигателя, рассчитывается по следующему выражению:
 (11) (11)
где Jрол
– суммарный момент инерции рабочих и опорных роликов;
Jшп
- момент инерции шпинделей;
Jпм
- момент инерции полумуфт;
i – передаточное отношение редуктора.
Определим момент инерции ролика:
 (12) (12)
где L - длина ролика, м;
D - диаметр ролика, м;
 - плотность материала(=7,66*103
кг/м3
). - плотность материала(=7,66*103
кг/м3
).
Учитывая количество рабочих и опорных роликов, получим:
 (13) (13)
Момент инерции шпинделей:
 (14) (14)
Тогда момент инерции рабочего органа будет равен:

Жесткость муфты между редуктором и шестерной клетью, приведенная к валу двигателя:
 .(15) .(15)
Учитывая, что при параллельном соединении упругих элементов жесткости складываются, найдем жесткости соединительных муфт С12
и С23
,которые являются упругими звеньями трехмассовой системы:
 (16) (16)
где См1
- жесткость соединительной муфты между двигателем и редуктором.
 (17) (17)
Расчет переходных процессов в трехмассовой системе сложен, поэтому преобразуем систему в двухмассовую.
Рассчитаем параметры схемы. Эквивалентная жесткость двухмассовой расчетной схемы:
 (18) (18)

 (19) (19)
Переход и обоснование перехода к одномассовой расчетной схеме будет приведен ниже.
1.4 Построение нагрузочной диаграммы и механической характеристики рабочей машины
Нагрузочная диаграмма механизма представляет собой зависимость приведенного к валу двигателя момента в функции времени за цикл работы.
Рабочий цикл представляет собой чередование работы привода при движении листа и холостая работа машины до начала следующего цикла работы. Строим упрощенную нагрузочную диаграмму рабочей машины, которая строится по рассчитанным для каждого участка цикла работы статическим нагрузкам, то есть без учета динамических нагрузок. Динамические нагрузки не входят в цикл работы, так как машина работает с постоянной скоростью.
Упрощенная нагрузочная диаграмма имеет вид:
- на интервале холостого хода момент равен моменту холостого хода;
- на интервале правки момент равен сумме моментов статического на оси рабочих валков, приведенного к валу двигателя и холостого хода.
Нагрузочная диаграмма представлена на рисунке 5.

Рисунок 5 – Нагрузочная диаграмма механизма
Механическая характеристика рабочей машины есть зависимость приведенного статического момента от скорости вала двигателя. Согласно заданию эта зависимость близка к параболической.
Механическая характеристика рабочей машины представлена на рисунке 6.
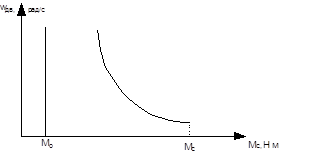
Рисунок 6 – Механическая характеристика рабочей машины
2. Анализ и описание системы «электропривод—сеть» и «электропривод— оператор»
Электропривод листоправильного стана получает питание от 3-х фазной сети переменного тока частотой 50 Гц, напряжением 380В.
Стандартами предусмотрено и допускается изменение напряжения сети ±10% и частоты ±2,5 % (ГОСТ 13109-87). Данное явление вызвано, среди всего прочего, наличием других мощных потребителей энергии в условиях цеха, завода. Это значительно влияет на работу двигателей, накладывает дополнительные требования к организации их работы.
При помощи автоматического выключателя QF1 подключаем напряжение на преобразователь частоты.
Нажатием кнопки ПУСК привод включается, далее привод работает в автоматическом режиме, для постоянного контроля работы привода оператор не требуется.
3. Выбор принципиальных решений
3.1 Построение механической части электропривода
Кинематическая схема главного электропривода листоправильного стана изображена на рисунке 2. Основная операция - правка, производится с помощью вращающихся валков, расположенных в рабочей клети. Верхний рабочий валок перемещается в вертикальной плоскости, а ось нижнего валка находится всегда в неизменном положении.
Передаточные механизмы в раскатном стане состоят из редуктора, шестерной клети, рабочих шпинделей и соединительных муфт.
Редуктор предназначен для того, чтобы при небольших скоростях раскатки получить возможность применение двигателя с относительно большой номинальной скоростью и тем самым снизить габариты и стоимость двигателя и всей установки в целом.
Шпиндели служат для передачи вращения валкам от шестерной клети. Необходимость их применения заключается в том, что с изменением положения верхнего валка изменяется и расстояние между этим валком и шестерной клетью, а также угол между валом шестерной клети и шпинделем.
Муфты применяются для соединения шестерной клети и двигателя с редуктором.
3.2 Выбор типа привода (двигателя)
Основой выбора типа двигателя является технические условия на проектирование привода листоправильного стана:
- продолжительный режим работы;
- ударная нагрузка;
- плавное регулирование скорости в заданном диапазоне.
Выше перечисленным условиям соответствуют следующие приводы:
1 Частотный преобразователь - асинхронный двигатель;
2 Управляемый выпрямитель - двигатель постоянного тока;
3 Каскадная схема;
4 Генератор - двигатель.
3.3 Выбор способа регулирования координат
При выборе способа регулирования координат (скорости) необходимо учитывать энергетический аспект выбора способа регулирования. Это значит, что минимальный габарит двигателя и его полное использование по нагреву имеет место тогда, когда способ регулирования скорости по показанию допустимой нагрузки соответствует зависимости нагрузки от скорости.
Так как механическая характеристика механизма является вязкой нагрузкой, то целесообразно использовать способ регулирования скорости при постоянстве мощности, т.е. регулирование с Р = const. В случае применения такого способа двигателю обеспечивается наилучший тепловой режим.
В системе частотный преобразователь (АИН ШИМ) – асинхронный двигатель необходимая скорость получается путем изменения частоты и формирования напряжения на статоре (вольт частотное управление) либо путем регулирования частоты и формировании вектора основного потокосцепления машины (векторное управление).
В системах управляемый выпрямитель – двигатель постоянного тока и генератор – двигатель необходимая скорость получается путем изменения напряжения питания якоря.
В каскадной схеме регулирование скорости осуществляется путем введения добавочной ЭДС в цепь ротора машины.
3.4 Оценка и сравнение выбранных вариантов
Система генератор – двигатель морально устарела, поэтому при сравнении выбранных вариантов учитываться не будет.
Проведение строгих технико-экономических расчётов не представляется возможным из-за отсутствия требуемых исходных данных, поэтому для оценки и сравнения выбранных вариантов воспользуемся приблизительным методом – “методом экспертных оценок”. Сравнение вариантов решения производится относительно n характеристик системы, важных с точки зрения цели проектирования путём сравнения определённых значений соответствующих показателей качества qi
. Показатели качества служат для количественной характеристики степени выполнения требований задания на проектирование электропривода, а также других требований рабочей машины.
Оценку электроприводов будем вести по следующим показателям качества:
1 - диапазон регулирования;
2 - КПД электропривода;
3 - коэффициент мощности;
4 - массогабаритные показатели;
5 - стоимость электропривода;
6 - надежность электропривода;
7 - ресурс работы;
8 - затраты на эксплуатацию;
9 - точность регулирования;
Оценим выполнение требований к i-ой характеристике системы по следующему критерию:
5 - требования к i-ой характеристике системы выполнено очень хорошо;
qi = 4 - требования к i-ой характеристике системы выполнено хорошо;
3 - требования к i-ой характеристике системы выполнено удовлетворительно;
2 - требования к i-ой характеристике системы выполнено неудовлетворительно.
Системы ПЧ – АД и УВ – ДПТ с обратной связью по скорости обеспечивают очень большой диапазон регулирования, поэтому требования к диапазону регулирования выполняются очень хорошо. В каскадной схеме диапазон ограничивается мощностью преобразователя, т.е. при увеличении диапазона мощность преобразователя становится больше мощности двигателя, поэтому требования к диапазону регулирования выполняются удовлетворительно.
КПД приводов мощностью  достаточно высок, поэтому требования к КПД привода выполняются очень хорошо. достаточно высок, поэтому требования к КПД привода выполняются очень хорошо.
Требования к коэффициенту мощности во всех приводах выполняются хорошо.
Массогабаритные показатели привода определяются массогабаритными показателями двигателя и преобразователя. Современные приводы ПЧ – АД и УВ – ДПТ имеют очень хорошие массогабаритные показатели, поэтому требования к массогабаритным показателям привода выполняются очень хорошо, а каскадная схема имеет несколько худшие массогабаритные показатели, поэтому требования к массогабаритным показателям привода выполняются хорошо.
Требование к стоимости в приводах УВ – ДПТ и каскадной схемы выполняется очень хорошо, а в приводе ПЧ – АД несколько хуже в связи тем, что стоимость ПЧ – АД несколько выше стоимости УВ – ДПТ и каскадной схеме.
Асинхронный двигатель с короткозамкнутым ротором не имеет коллекторного узла и щеточных контактов, поэтому требования к надежности и ресурсу работы выполняются очень хорошо. В каскадной схеме двигатель не имеет коллекторного узла, но имеет щеточный контакт, поэтому требования к надежности и ресурсу работы выполняются хорошо. Двигатель постоянного тока имеет коллекторный узел, поэтому требования к надежности выполняются неудовлетворительно, а при надлежащем уходе за коллектором требования к ресурсу работы выполняются удовлетворительно.
Привод ПЧ – АД не требует эксплуатационных затрат, поэтому требования к эксплуатационным затратам выполняются очень хорошо. В каскадной схеме необходима периодическая проверка щеточных контактов, поэтому требования к эксплуатационным затратам выполняются хорошо. В приводе УВ – ДПТ необходим более частый осмотр коллекторного узла, а также периодическая чистка щеток, поэтому требования к эксплуатационным затратам выполняются удовлетворительно.
В приводе УВ – ДПТ требования к точности регулирования выполняются очень хорошо. В приводе ПЧ – АД требования к точности регулирования выполняются хорошо. В каскадной схеме требования к точности регулирования выполняются удовлетворительно.
Выбор варианта в качестве наилучшего зависит от того, насколько равноправными являются характеристики системы, т.е. нужно оценить их значимость. Для этого вводятся весовые коэффициенты λi
, которые можно определить следующим образом:
5 - i-я характеристика системы имеет определяющее значение для цели разработки;
4 - -“- очень большое, но не определяющее значение;
li= 3 - -“- важное;
2 - -“- желательно учесть;
1 - -“- несущественно для цели разработки.
Задачей электропривода является совершение полезной работы с минимумом потерь, поэтому КПД электропривода имеет определяющее значение.
Потребление реактивной мощности из сети нормируется, (за превышение нормы предприятию приходится платить штраф), поэтому коэффициент мощности имеет определяющее значение.
Так как листоправильный стан является агрегатом непрерывного действия и невынужденный простой его приводит к огромным убыткам, поэтому надежность и ресурс работы имеют определяющее значение.
Согласно заданию привод должен обеспечить относительно небольшой диапазон регулирования, поэтому этот показатель качества не имеет очень большого и определяющего значения и его можно охарактеризовать как важный.
Стоимость имеет очень большое значение. Однако, как известно, стоимость тесно связана с качеством, поэтому такой показатель как стоимость имеет большое, но не определяющее значение.
Обычно на металлургических предприятиях имеются помещения достаточные для размещения стана, поэтому массогабаритные показатели стана не имеет очень большого и определяющего значения. Однако с увеличение массы стана увеличивается и его стоимость, поэтому этот показатель можно охарактеризовать как важный.
Оценочная диаграмма представлена на рисунке 7.
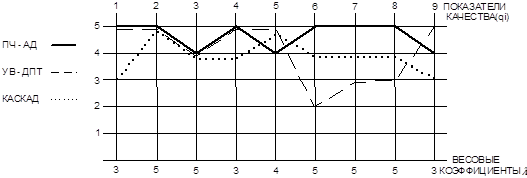
Рисунок 7 – Оценочная диаграмма (показатели качества: 1 - диапазон регулирования; 2 – КПД электропривода; 3 - коэффициент мощности; 4 - массогабаритные показатели; 5 - стоимость электропривода; 6 - надежность электропривода; 7 - ресурс работы; 8 - затраты на эксплуатацию; 9 - точность регулирования)
Выбор наилучшего решения производится определением взвешенной суммы, (лучший вариант имеет большую сумму) по формуле:
 (20) (20)
где - показатель качества; - показатель качества;
 - весовой коэффициент; - весовой коэффициент;
 - взвешенная сумма. - взвешенная сумма.
Определим взвешенные суммы:
 ; ;
 ; ;
 ; ;
В результате получаем, что максимальную взвешенную сумму имеет следующий привод: преобразователь частоты – асинхронный двигатель.
Следовательно, данный привод и подлежит дальнейшему расчету.
4. Расчет силового электропривода
4.1 Расчет параметров и выбор двигателя
Расчетный режим работы двигателя – длительный с переменной нагрузкой, так как в процессе работы двигателя паузы отсутствуют, и нагрузка изменяется скачками (рисунок 5).
Так как необходимые исходные данные для расчета мощности двигателя методами средних потерь, эквивалентного тока отсутствуют, поэтому воспользуемся менее точным методом – методом эквивалентного момента, считая, что постоянные потери, сопротивления двигателя в процессе работы не изменяются, а также, что момент, развиваемый двигателем, пропорционален току.
Согласно нагрузочной диаграмме и механической характеристике рабочей машины момент эквивалентный равен:
 (21) (21)
где - коэффициент ухудшения охлаждения машины при работе со скоростью - коэффициент ухудшения охлаждения машины при работе со скоростью  ; ;
 - коэффициент ухудшения охлаждения при паузах, зависящий от вентиляции двигателя (для закрытых самовентилируемых двигателей =0,45
-0,55 ) - коэффициент ухудшения охлаждения при паузах, зависящий от вентиляции двигателя (для закрытых самовентилируемых двигателей =0,45
-0,55 )
 - диапазон регулирования при работе со скоростью . - диапазон регулирования при работе со скоростью .
Дополнительную нагрузку, создаваемую динамическим моментом, будем учитывать коэффициентом запаса  . .
Рассчитаем момент эквивалентный без учета коэффициента ухудшения охлаждения машины при работе со скоростью отличной от номинальной для двух предельных режимов работы привода:
1)прогонка максимальной длины листа с минимальной скоростью:
 ; ;
2) прогонка минимальной длины листа с максимальной скоростью:
 . .
Примем момент наибольший из двух приведенных случаев:
 . .
По заданию проекта требуется обеспечить работу в диапазоне скоростей, следовательно, частоты вращения двигателя:
 рад/с; рад/с;
 об/мин;(22) об/мин;(22)
 рад/с; рад/с;
 об/мин;(23) об/мин;(23)
Минимальная частота вращения двигателя - nдв
=500 об/мин, она меньше требуемой. Поэтому регулировать приводом мы будем в 1-ой зоне.
Применяя частотно регулируемый привод, мы сможем обеспечить требуемую частоту вращения.
Оценим необходимую мощность двигателя:
 . (24) . (24)
Критерии выбора двигателя следующие:

 (25) (25)
 . .
При выборе необходимо выбирать двигатель с  , чтобы более полно использовать двигатель по мощности. , чтобы более полно использовать двигатель по мощности.
Однако промышленностью выпускаются двигатели (стандартной серии 4А) мощностью больше 197,3 кВт (200кВт) только на обороты свыше 1000 об/мин (104,6 рад/с) и выше, причем при увеличении мощности увеличивается номинальная скорость двигателей.
Так же при увеличении номинальной скорости двигателя уменьшается номинальный момент, согласно формуле
 , ,
откуда следует, что для того чтобы двигатель не перегревался в процессе работы необходимо завысить мощность двигателя.
Таким образом, необходимо выбирать двигатель мощностью  и и  об/мин. Однако стандартного двигателя (серии 4А) с такими параметрами нет. об/мин. Однако стандартного двигателя (серии 4А) с такими параметрами нет.
Из-за невозможности выполнения привода большой мощности с одним двигателем будем строить электропривод, состоящий из двух машин. Взаимосвязный электропривод в установках большой мощности позволяет уменьшить нагрузку каждого привода и тем самым облегчить передачу к рабочему органу, уменьшить суммарный момент инерции роторов двигателей.
Таким образом, из справочника выбираем двигатели (серии 4А) с идентичными параметрами (поэтому далее все расчеты будем производить для одного двигателя):
4А355M12У3(IP44),
Рн
= 110кВт – номинальная мощность,
n = 500 об/мин – синхронная частота вращения,
sн
= 0,02 – номинальное скольжение,
 - номинальный КПД, - номинальный КПД,
 , ,
 - момент инерции ротора, - момент инерции ротора,
 - кратность критического момента, - кратность критического момента,
 - кратность пускового момента, - кратность пускового момента,
 о.е.; о.е.;  о.е.; о.е.;  о.е.; о.е.;  о.е.; о.е.;  о.е. – параметры схемы замещения в о.е. о.е. – параметры схемы замещения в о.е.
Номинальная скорость двигателя равна:
 (26) (26)
 (27) (27)
Номинальный момент двигателя:
 (28) (28)
Для того чтобы двигатель не перегревался, необходимо, чтобы момент допустимый по нагреву двигателя (равный моменту номинальному двигателя) был больше либо равен моменту эквивалентному:
 (29) (29)
Таким образом, выбранный двигатель проходит по нагреву.
Проверяем правильность выбора двигателя по перегрузочной способности и по условиям пуска.
Привод пускается на холостом ходу, тогда:
 (30) (30)
По перегрузочной способности:
 (31) (31)
где U = 0.9Uн
– учитываем возможное снижение питающего напряжения на 10%.
4.2 Расчет параметров и выбор силового преобразователя
Требуется выбрать преобразователь частоты со следующими характеристиками:
- тип преобразователя – АИН ШИМ;
- закон управления – P=const;
- питающая сеть: ~3 380В 50Гц;
- мощность преобразователя – Р=75 кВт.
Выбираем преобразователь Omron 3G3FV А4750 CUE. Высоко динамичный с большой глубиной регулирования. Пусковой момент до 150% с 3 Hz. Отличается режимом векторного управления, возможностью работы с полным моментом в области нулевых частот и улучшенными динамическими характеристиками: имеет функцию автоматического определения параметров электродвигателя. 7 дискретных входов (6 из них программируемые), 3 аналоговых входа (1 программируемый) (0-10В или 4-20мА). 2 аналоговых выхода для мониторинга частоты или тока. 2 программируемых релейных выхода (до 1А). 2 опторазвязанных выхода Встроенный RS232/RS485/422 + PID + Энергосбережение + neuro-Fuzzy + крановые характеристики.
Таблица 1 – Характеристики преобразователя
| Параметр
|
Значение
|
| Мощность (кВт)
|
75
|
| Входное напряжение (В)
|
380В~460В
|
| Входная частота (Гц)
|
50/60 Гц
|
| Допустимое колебание напряжения
|
от -15% до +10%
|
| Диапазон частоты (Гц)
|
0.1~400 Гц
|
| Разрешение выходной частоты (Гц)
|
0.01Гц
|
| Управление двигателем
|
вольт-частотное / векторное с обратной связью
|
| Несущая частота (кГц)
|
0.4~15 кГц
|
| Коммуникационные возможности
|
Modbus; Compo Bus/D (Device Net); Profibus DP Sysmac Bus; Interbus
|
| Аналоговый выход (0-10 В)
|
есть
|
| Количество фиксированных скоростей
|
8
|
| Аналоговое задание скорости
|
-10 ~ +10 В
0~10 В
4~20мА
|
| Время ускорения/замедления
|
от 0.01 до 6000 сек.
|
| Степень защиты
|
IP20
|
Частотный преобразователь обеспечивает полную защиту преобразователя и двигателя от перегрузок по току, перегрева, утечки на землю, и обрыва фазы.
5. Расчет статических механических и электромеханических характеристик двигателя и привода
Механическая характеристика рассчитывается по формуле:
 (32) (32)
где - фазное напряжение на статоре; - фазное напряжение на статоре;
 - активное сопротивление фазы статора, Ом; - активное сопротивление фазы статора, Ом;
 - активное сопротивление фазы ротора, приведенное к цепи статора, Ом; - активное сопротивление фазы ротора, приведенное к цепи статора, Ом;
 - индуктивное сопротивление фазы статора, Ом; - индуктивное сопротивление фазы статора, Ом;
 - индуктивное сопротивление фазы ротора, приведенное к цепи статора, Ом; - индуктивное сопротивление фазы ротора, приведенное к цепи статора, Ом;
s – скольжение;
 - скорость идеального холостого хода (магнитного поля). - скорость идеального холостого хода (магнитного поля).
Сопротивления фаз статора и приведенные сопротивления фаз ротора рассчитаем по справочным данным.
Базисное значение сопротивления:
 (33) (33)
где в качестве базисных значений напряжения и тока принимаем номинальные значения фазного напряжения и тока статора:
 (34) (34)
Тогда:

 (35) (35)


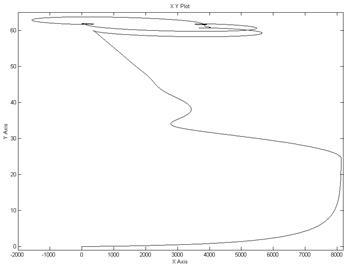
Построим естественную механическую характеристику по формуле (41) используя математический пакет Mathcad, учитывая, что  , подставляя , подставляя  , откладывая по оси х момент М, а по оси у - скорость двигателя , откладывая по оси х момент М, а по оси у - скорость двигателя  . .
Естественная механическая характеристика двигателя представлена на рисунке 8.
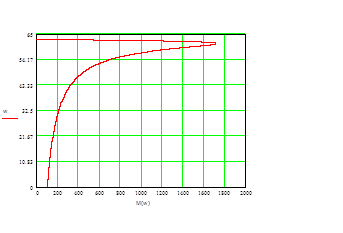
Рисунок 8 - Естественная механическая характеристика двигателя
Рассчитаем электромеханические характеристики двигателя.
В качестве базисной величины тока, принимаем номинальное значение тока ротора, приведенного к статорной цепи.
Зависимость приведенного тока ротора от скольжения определяется по формуле:
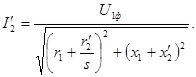 (36) (36)
Зависимость тока статора от скольжения определяется по формуле:
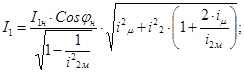 (37) (37)
где - относительный ток ротора; - относительный ток ротора;
 - максимальное значение относительного тока ротора; - максимальное значение относительного тока ротора;
 - относительный ток намагничивания; - относительный ток намагничивания;
 - номинальный ток статора. - номинальный ток статора.
Максимальное значение относительного тока ротора:
 (38) (38)
где - критическое скольжение; - критическое скольжение;
 .(39) .(39)
Относительный ток намагничивания:
 (40) (40)
Относительный ток ротора:
 (41) (41)
Построим естественную электромеханическую характеристику роторного тока и электромеханическую характеристику статорного тока, используя математический пакет Mathcad, подставляя , откладывая по оси х ток I, а по оси у - скорость двигателя .
Естественные ЭМХ двигателя представлены на рисунке 9.
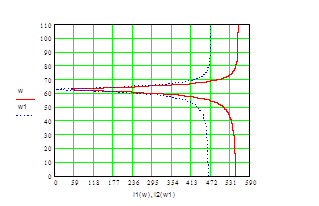
Рисунок 9 - Естественные электромеханические характеристики двигателя
Так как для регулирования скорости применяется ПИ – регулятор (будет показано ниже), который дает нулевую статическую ошибку, поэтому механическая характеристика привода будет абсолютно жесткой.
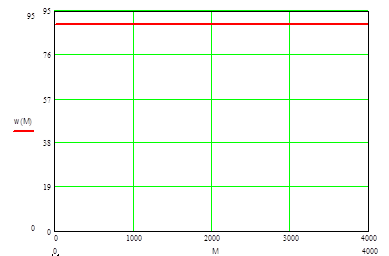
Рисунок 10 - Механическая характеристика привода
6. Расчет переходных процессов в электроприводе за цикл работы
Для получения более простых передаточных функций регуляторов необходимо перейти от двухмассовой расчетной схемы к одномассовой расчетной схеме.
Обоснование перехода к одномассовой расчетной схеме:
- используются только обратные связи по переменным двигателя;
- частота собственных колебаний:
 (42) (42)
- условие перехода:  . .
Как показано ниже Т
привода составляет 0,0258, тогда  . Тогда условие перехода выполняются ( . Тогда условие перехода выполняются ( ) и, следовательно, можно перейти к одномассовой расчетной схеме. ) и, следовательно, можно перейти к одномассовой расчетной схеме.
Суммарный момент инерции одномассовой расчетной схемы будет равен:
 . .
Одномассовая расчетная схема представлена на рисунке 11

Рисунок 11 - Одномассовая расчетная схема
При регулировании зависимость момента допустимого по нагреву двигателя от скорости должна повторять зависимость момента статического от скорости.
Для управления приводом будем использовать двухконтурную систему автоматического регулирования с вольт/частотным управлением с последовательной коррекцией звеньев, с внутренним контуром регулирования момента и внешним контуром регулирования скорости.
При вольт/частотном управлении организуется два канала управления: канал управления частотой питания и канал управления напряжением. Стабилизация скорости осуществляется путем регулирования напряжения в функции частоты и в функции нагрузки.
Рассмотрим канал регулирования частоты.
Разлаживая уравнения динамической механической характеристики в ряд и линеаризуя полученные уравнения в окрестности точки М=0, s=0, получим линеаризованную модель асинхронного двигателя, справедливую для  . .
Вследствие того, что в асинхронном электроприводе сложно измерять момент двигателя, вместо регулирования момента по отклонению применяют регулирование по возмущению. Т.к. возмущающим воздействием для контура регулирования момента является скорость, то будем вводить положительную обратную связь по скорости, с коэффициентом передачи  . .
Регулировать скорость двигателя будем по отклонению, вводя отрицательную обратную связь по скорости.
Структурная схема канала регулирования частоты представлена на рисунке 12.
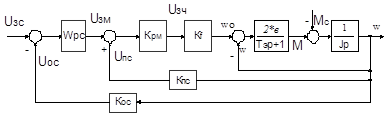
Рисунок 12 - Структурная схема канала регулирования частоты
Рассмотрим контур регулирования момента.
Для статического режима:
 (43) (43)
Нулевая ошибка будет обеспечена, если:

 .(44) .(44)
Максимальное значение момента двигателя:
 .(45) .(45)
При вольт/частотном управлении с  : :
 (46) (46) (47) (47)
Электромагнитная постоянная времени:
 (48) (48)
Жесткость механической характеристики:
 (49) (49)
Коэффициент передачи преобразователя по частоте определяется отношением максимального сигнала на выходе преобразователя к максимальному сигналу на выходе регулятора момента:
 .(50) .(50)
Максимальное значение момента ограничения равно критическому моменту естественной характеристики двигателя:
 (51) (51)
Из уравнения (45) находим Крм
:
 (52) (52)
Регулятор момента представляется в виде П – регулятора .
Предельное значение коэффициента усиления обратной связи, обеспечивающее регулирования момента с нулевой ошибкой:
 (53) (53)
Для расчета контура скорости представим контур момента в виде звена:

 (54) (54)
Обозначив  , получим передаточную функцию оптимизированного контура регулирования момента: , получим передаточную функцию оптимизированного контура регулирования момента:
 (55) (55)
где 
Структурная схема контура регулирования скорости представлена на рисунке 13
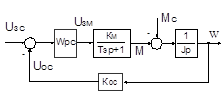
Рисунок 13 – Структурная схема контура регулирования скорости
Коэффициент передачи датчика отрицательной обратной связи по скорости рассчитывается как отношение максимальной скорости на соответствующее напряжение задания:
 (56) (56)
Малой некомпенсируемой постоянной времени контура регулирования скорости является электромагнитная постоянная двигателя, т.е. принимаем  . .
Большой компенсируемой постоянной времени контура регулирования скорости является механическая постоянная двигателя.
Для получения нулевой ошибки в статике и форсировки переходных процессов в динамике регулятор скорости должен быть ПИ – регулятор.
Настроим регулятор скорости на симметричный оптимум.
Желаемая передаточная функция контура скорости настроенного на симметричный оптимум:
 .(57) .(57)
Передаточная функция объекта регулирования:
 (58) (58)
Разделив желаемую передаточную функцию контура скорости, на передаточную функция объекта регулирования получим передаточную функцию регулятора скорости:
 (59) (59)
где , ,
 ;(60) ;(60)
 ; ;
 . .
Для того чтобы убрать перерегулирование, по заданию необходимо на входе контура скорости поставить фильтр с постоянной времени  и следующей передаточной функцией: и следующей передаточной функцией:
 (61) (61)
Расчет переходных процессов производятся в пакете Matlab.
В модели будем использовать одномассовую консервативную расчетную схему привода.
Модель привода представлена на рисунке 14.

Рисунок 14 – Модель привода
Графики переходных процессов – момента электромагнитного двигателя и скорости первой массы, приведенные к валу двигателя - представлены на рисунках 15, 16.
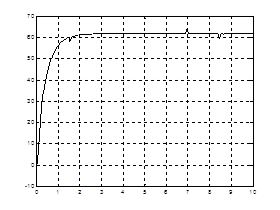
Рисунок 15 – График переходного процесса скорости первой массы
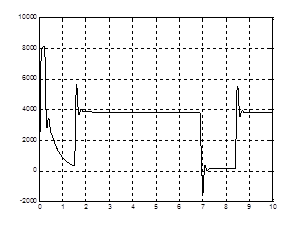
Рисунок 16 – График переходного процесса электромагнитного момента
В результате моделирования получили, что перерегулирование скорости составляет:

7. Проверка правильности расчета мощности и окончательный выбор двигателя
Проверку правильности расчета мощности выполним методом средних потерь.
Полные номинальные потери в двигателе равны:
 (62) (62)
Переменные номинальные потери в двигателе равны:
 (63) (63)
Тогда постоянные потери будут равны:
 (64) (64)
Средние потери за цикл работы равны:
 (65) (65)
где - потери в i-й момент времени, - потери в i-й момент времени,
 - коэффициент ухудшения охлаждения при работе со скоростью - коэффициент ухудшения охлаждения при работе со скоростью  , ,
Тц
=6.9 с – время цикла.
Потери в i-й момент времени можно определить из следующего выражения:
 ,(66) ,(66)
где , ,
 - степень загрузки двигателя. - степень загрузки двигателя.
Или
 .(66’) .(66’)
Подставляя (66’) в (65) получим:
 (67) (67)
Используя выражения (67) найдем средние потери за цикл работы.
Для нахождения средних потерь по формуле (67) воспользуемся моделью привода.
Сначала возводим в квадрат момент электромагнитный двигателя. Потом делим полученное значение на квадрат номинального момента и прибавляем  . Затем интегрируем полученное значение и умножаем на . Затем интегрируем полученное значение и умножаем на  , получаем значение средних потерь за цикл работы. , получаем значение средних потерь за цикл работы.
Модель для нахождения средних потерь за цикл работы представлена на рисунке 17.
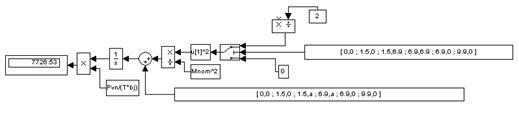
Рисунок 17 - Модель для нахождения средний потерь за цикл работы
В результате моделирования было получено, что средние потери за цикл работы равны:
 . .
Тогда коэффициент загрузки двигателя составляет:
 (68) (68)
Таким образом, двигатель загружен на 80% (70%<80%<100%), следовательно, оставляем выбранный двигатель.
|