МГТУ «МАМИ»
КУРСОВОЙ ПРОЕКТ
Кинематический и силовой расчет механизма долбежного станка с качающейся кулисой
Москва
2010
Содержание
1. Исходные данные
2. Структурный анализ механизма
3. Построение положений механизма
4. Построение планов скоростей
4.1 План скоростей для рабочего хода
4.2 План скоростей для холостого хода
4.3 План скоростей для верхнего крайнего положения
4.4 План скоростей для нижнего крайнего положения
5. Построение планов ускорений
5.1 План ускорений для рабочего хода
5.2 План ускорений для холостого хода
5.3 План ускорений для верхнего крайнего положения
5.4 План ускорений для нижнего крайнего положения
6. Кинетостатический расчет механизма
6.1 Определение сил инерции и сил тяжести звеньев
6.2 Определение реакций в кинематической паре 4-5
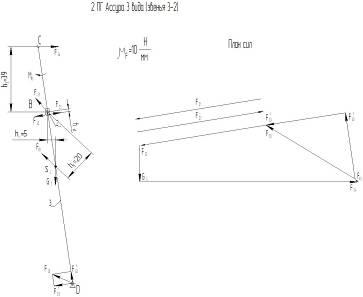
6.3 Определение реакций в кинематической паре 3-2
6.4 Определение уравновешивающей силы на кривошипе 1
7. Определение уравновешивающей силы с помощью рычага Жуковского
Список использованной литературы
1. Исходные данные
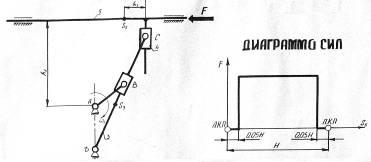
Механизм долбежного станка с качающейся кулисой.
2. Структурный анализ механизма
Определим число степеней свободы механизма по формуле Чебышева:
W= 3n – 2р1
–р2,
где n – число подвижных звеньев механизма,
р1
– число низших кинематических пар,
р2
- число высших кинематических пар.
Согласно структурной схеме механизма число подвижных звеньев n = 5.
Составим таблицу кинематических пар, соединяющих звенья:
Обозначения
кинематической пары
|
A |
B |
C |
D |
П1
|
П2
|
П3
|
| Звенья, образующие кинематическую пару |
0,1 |
1,2 |
3,4 |
3,0 |
2,3 |
4,0 |
5,0 |
| Наименование пары |
вращательные |
поступа-
тельные
|
Количество низших кинематических пар: p1
=7
Количество высших кинематических пар: p2
=0
W= 3 × 5 – 2 × 7 = 1
Механизм имеет одну степень свободы, и значит, в нем должно быть одно начальное звено. За начальное звено принимаем кривошип 1, движение которого задано, на котором требуется определить уравновешивающую силу.
Тогда последовательность образования механизма по Ассуру будет следующей:Начальное звено 1, стойка 0.
Возможными поводками для присоединения групп Ассура к начальному звену и стойке являются звенья: 2, 3, 5. Из них звенья 2 и 3 образуют двухповодковую группу Ассура 3 вида (ВПВ). В этой группе внешние кинематические пары, которыми звенья группы присоединяются к начальному звену и стойке вращательные: (1 – 2) и (3 – 0), внутренняя кинематическая пара, которая соединяет между собой звенья 2 и 3 – поступательная (2 – 3). Присоединив 2ПГ Ассура 3 вида к начальному звену 1 и стойке 0, получим промежуточный механизм: 0, 1, 2, 3.
По отношению к промежуточному механизму поводками будут звенья 5 и 4 (образующие кинематические пары со звеньями промежуточного механизма). Звенья 4 и 5 образуют двухповодковую группу Ассура 5 вида (ВПП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – поступательная (4 – 0).
Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала 2ПГ 3 вида, а затем 2ПГ 5 вида.
3. Построение положений механизма
Для построения кинематической схемы исследуемого механизма в различных положениях выбираем масштабный коэффициент длины  , который определяется как: , который определяется как:
μl
= l1
/ AB = 0,14 / 28 = 0,005 м/мм
Каждое положение механизма обозначено соответствующим индексом:
I – соответствует левому крайнему положению ползуна 5,
II – соответствует правому крайнему положению ползуна 5,
III – соответствует рабочему ходу ползуна 5,
IV – соответствует холостому ходу ползуна 5.
Рабочему ходу ползуна соответствует угол поворота кривошипа φр.х
. Холостому ходу – φх.х
.
При выборе расчётного рабочего положения используем диаграмму сил F=F(SЕ
), построенную на ходе ползуна 5. В металлорежущих станках процесс резания происходит только на части рабочего хода, соответствующей длине обрабатываемой детали lЕ
. Поэтому выбираем положение кривошипа на угле поворота φр.х
, соответствующем рабочему ходу, когда ползун 5 (точка Е) находится внутри отрезка lЕ
.
При выборе положения механизма, соответствующего холостому ходу ползуна, берём любое положение кривошипа на угле его поворота φх.х.
4. Построение планов скоростей
4.1 План скоростей для рабочего хода
VB1
= VB2
= ω1
· l1
=  · l1
= · l1
=  = 0,9 м/с = 0,9 м/с
μv
= VB1
/ (pb1
) = 0,9 / 90 = 0,01 
___ ___ ____
VB3
= VB2
+ VB3B2
___ ___ ____
VB3
= VD
+ VB3D
VB3
= (pb3
) · μv
= 82 · 0,01 = 0,82 м/с
VB3B2
= (b2
b3
) · μv
= 36 · 0,01 = 0,36 м/с
(c3
d) = (b3
d) ·  = 82 · = 82 ·  = 113 мм = 113 мм
VC3
= (c3
d) · μv
= 113 · 0,01 = 1,13 м/с
__ __ ___
VС3
= VE
+ VС3E
VЕ
= (pе) · μv
= 112 · 0,01 = 1,12 м/с
VС3E
= (с3
е) · μv
= 16 · 0,01 = 0,16 м/с
ω2
= ω3
= VB3
/ lBD
= 0,82 / 0,51 = 1,6 c-1

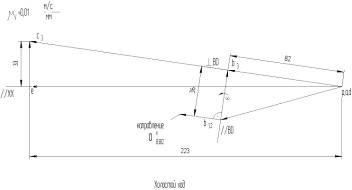
4.2 План скоростей для холостого хода
___ ___ ____
VB3
= VB2
+ VB3B2
___ ___ ____
VB3
= VD
+ VB3D
VB3
= (pb3
) · μv
= 82 · 0,01 = 0,82 м/с
VB3B2
= (b2
b3
) · μv
= 36 · 0,01 = 0,36 м/с
(c3
d) = (b3
d) · = 82 ·  = 225,8 мм = 225,8 мм
VC3
= (c3
d) · μv
= 225,8 · 0,01 = 2,26 м/с
__ __ ___
VС3
= VE
+ VС3E
VЕ
= (pе) · μv
= 223 · 0,01 = 2,23 м/с
VС3E
= (с3
е) · μv
= 33 · 0,01 = 0,33 м/с
ω2
= ω3
= VB3
/ lBD
= 0,82 / 0,26 = 3,15 c-1
4.3 План скоростей для левого крайнего положения
VB3
= (pb3
) · μv
= 0 · 0,01 = 0 м/с
VB3B2
= VB1
= 0,9 м/с
VC3
= 0; VE
= 0
ω2
= ω3
= 0; ω4
= 0
4.4 План скоростей для правого крайнего положения
VB3
= (pb3
) · μv
= 0 · 0,01 = 0 м/с
VB3B2
= VB1
= 0,9 м/с
VC3
= 0; VE
= 0
ω2
= ω3
= 0; ω4
= 0
5. Построение планов ускорений
5.1 План ускорений для рабочего хода
аВА
τ
= 0, т.к. ω1
= const.
аВ1
= аВ2
= аВА
n
=  = ω1
2
· lBA
= = ω1
2
· lBA
=  · lBA
= · lBA
=  · 0,14 = 5,52 м/с2 · 0,14 = 5,52 м/с2
μа
=  = =  = 0,1 = 0,1 
__ __ ____ ____
аВ3
= аВ2
+ аВ3В2
к
+ аВ3В2
r
__ __ ____ ____
аВ3
= аD
+ аВ3D
n
+ аВ3D
t
 = =  = 0,2 = 0,2
аВ3В2
к
= 2 · ω3
· VB3B2
= 2 · 1,6 · 0,36 = 1,16 м/с2
КВ3В2
=  = =  · 0,2 = 11,5 мм · 0,2 = 11,5 мм
nB3D
=  = =  · 0,2 = 13,1 мм · 0,2 = 13,1 мм
аВ3
= (πb3
) · μа
= 16,9 · 0,1 = 1,69 м/с2
аВ3D
t
= tB3D
· μа
= 10,7 · 0,1 = 1,07 м/с2
аВ3В2
r
= rB3B2
· μа
= 37,5 · 0,1 = 3,75 м/с2
 ; (πс3
) = ; (πс3
) =  = =  = 23,3 мм = 23,3 мм
аС3
= (πс3
) · μа
= 23,3 · 0,1 = 2,33 м/с2
__ __ ___
аЕ
= аС3
+ аС3E
аС3E
= с3
е · μа
= 15,7 · 0,1 = 1,57 м/с2
аЕ
= (πе) · μа
= 17,2 · 0,1 = 1,72 м/с2
ε1
= 0
ε2
= ε3
=  = =  = 2,1 c-2 = 2,1 c-2
ε4
= 0
ε5
= 0

5.2 План ускорений для холостого хода
аВ3В2
к
= 2 · ω3
· VB3B2
= 2 · 3,15 · 0,36 = 2,27 м/с2
КВ3В2
= =  · 0,2 = 22,9 мм · 0,2 = 22,9 мм
nB3D
= =  · 0,2 = 26,3 мм · 0,2 = 26,3 мм
аВ3
= (πb3
) · μа
= 52,2 · 0,1 = 5,22 м/с2
аВ3D
t
= tB3D
· μа
= 45,1 · 0,1 = 4,51 м/с2
аВ3В2
r
= rB3B2
· μа
= 76,8 · 0,1 = 7,68 м/с2
; (πс3
) = =  = 143,8 мм = 143,8 мм
аС3
= (πс3
) · μа
= 143,8 · 0,1 = 14,38 м/с2
__ __ ___
аЕ
= аС3
+ аС3E
аС3E
= с3
е · μа
= 53,7 · 0,1 = 5,37 м/с2
аЕ
= (πе) · μа
= 133,4 · 0,1 = 13,34 м/с2
ε1
= 0
ε2
= ε3
= =  = 17,3 c-2 = 17,3 c-2
ε4
= 0
ε5
= 0

5.3. План ускорений для левого крайнего положения.
__ ____ ___
аВ3
= аВ3D
t
= аВА
n
аВ3
= 5,52 м/с2
; (πс3
) = =  = 107,6 мм = 107,6 мм
аС3
= (πс3
) · μа
= 107,6 · 0,1 = 10,76 м/с2

аС3E
= с3
е · μа
= 38,6 · 0,1 = 3,86 м/с2
аЕ
= (πе) · μа
= 100,4 · 0,1 = 10,04 м/с2
ε2
= ε3
= =  = 15,3 c-2 = 15,3 c-2
5.4 План ускорений для правого крайнего положения
аВ3
= аВ3D
t
= аВА
n
аВ3
= 5,52 м/с2
 ; (πс3
) = = = 107,6 мм ; (πс3
) = = = 107,6 мм
аС3
= (πс3
) · μа
= 107,6 · 0,1 = 10,76 м/с2
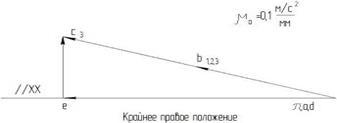
аС3E
= с3
е · μа
= 38,6 · 0,1 = 3,86 м/с2
аЕ
= (πе) · μа
= 100,4 · 0,1 = 10,04 м/с2
ε2
= ε3
= = = 15,3 c-2
6. Кинетостатический расчет механизма
6.1 Определение сил инерции и сил тяжести звеньев
Силы тяжести  , ,  приложены в центрах масс S3
, S5
звеньев и направлены вертикально вниз. Рассчитаем модули этих сил: приложены в центрах масс S3
, S5
звеньев и направлены вертикально вниз. Рассчитаем модули этих сил:
G3
= m3
· g = 22 · 9,8 = 216 H
G5
= m5
· g = 26 · 9,8 = 255 H
При определении сил инерции и моментов сил инерции воспользуемся построенным планом ускорений для нахождения ускорений центров масс звеньев.
 ; (πs3
) = ; (πs3
) =  = =  = 11,5 мм = 11,5 мм
аS3
= (πs3
) · μа
= 11,5 · 0,1 = 1,15 м/с2
aS5
= aЕ
= 1,72 м/с2
Теперь рассчитаем модули сил инерции.
Звено 3 совершает вращательное движение.
FИ3
= m3
· aS3
= 22 · 1,15 = 25,3 H
MИ3
= JS3
· ε3
= 0,4 · 2,1 = 0,84 H · м
Звено 5 совершает поступательное движение.
FИ5
= m5
· aS5
= 26 · 1,72 = 44,72 Н
Сила инерции FИ3
приложена в центре масс S3
звена 3 и направлена противоположно ускорению аS3
. Сила инерции FИ5
приложена в центре масс S5
звена 5 и направлена противоположно ускорению аS5
. Момент сил инерции MИ3
по направлению противоположен угловому ускорению ε3
.
6.2 Определение реакций в кинематической паре 4-5
| № |
Что определяется |
Каким уравнением |
Для какого звена |
| 1. |
 |
 =0 =0 |
4, 5 |
| 2. |
 (или (или  ) ) |
=0 |
4 |
| 3. |
 |
 |
5 |
| 4. |
 (или (или  ) ) |
=0 |
4 (или 5) |
___ __ __ __ __ __
1. 
μF
= F / f = 1250 / 125 = 10 Н / мм
F40
= f40
· μF
= 129,5 · 10 = 1295 H
F50
= f50
· μF
= 25,5 · 10 = 255 H
___ __ __ __
2. 
__ ___ ___
F43
= -F40
F43
= 1295 H
3.  , откуда =0. , откуда =0.
__ __
4.F45
= F43
F45
= 1295 H

6.3 Определение реакций в кинематической паре 3-2
| № |
Что определяется |
Каким уравнением |
Для какого звена |
| 1. |
 
|
 |
2,3 |
| 2. |
 |
=0 |
3 |
| 3. |
 |
=0 |
2 |
| 4. |
 |
|
2 |
1.  ,
,
 =
=
= = 477 Н = 477 Н
2.   . .
F32
= f32
· μF
= 75,8 · 10 = 758 H
F23
= -F32
; F23
= 758 H
F30
n
= f30
n
· μF
= 39,8 · 10 = 398 H
F30
= f30
· μF
= 61,9 · 10 = 619 H
___ __ __
3. 
F21
= -F23
= 758 H
4.  , откуда , откуда  =0. =0.
6.4 Определение уравновешивающей силы на кривошипе 1
| № |
Что определяется |
Каким уравнением |
Для какого звена |
| 1. |
Fур
|
 |
1 |
| 2. |
 |
 |
1 |

1.  , ,
 = =  = 703,9 Н = 703,9 Н
2. 
F10
= f10
· μF
= 140,4 · 10 = 1404 H
7. Определение уравновешивающей силы с помощью рычага Жуковского
План скоростей для рассматриваемого рабочего положения механизма поворачиваем на 90° в сторону, противоположную вращению кривошипа.
Находим на плане скоростей точку s3
, одноимённую точке S3
на механизме.
 ; (рs3
) = ; (рs3
) =  = =  = 55,8 мм = 55,8 мм
Все силы, действующие на звенья механизма, включая силы инерции и искомую уравновешивающую силу, переносим параллельно самим себе в одноимённые точки повёрнутого плана. Если на звено действует момент сил, то этот момент следует предварительно представить на звене механизма как пару сил, вычислив их величины:
FM3
=  = =  = 1,63 H = 1,63 H
Составим уравнение моментов всех сил относительно полюса повёрнутого плана скоростей:

 = =
= = 698,5 Н = 698,5 Н
Полученную с помощью рычага Жуковского уравновешивающую силу сравниваем с силой, полученной в результате кинетостатического расчёта:
 ·100% = 0,7% < 5% ·100% = 0,7% < 5%
Список использованной литературы
1. Артоболевский И.И. Теория механизмов и машин. М., 1975г.
2. Петрова Т.М., Дмитриева Л.Н. Методические указания по теории механизмов и машин «Кинематический и силовой расчет механизма», М., МАМИ, 1990г.
|