Реферат
Курсовий проект на тему: “Розробка конструкції робочого органу і схеми збиральної машини”, складається з графічної частини на 4 листах формату А1 та пояснюючої записки.
Об’єктом розробки в даному курсовому проекті є зернозбиральна машина, тобто необхідно розробити схеми збиральної машини та конструкції одного вузла.
Пояснююча записка містить опис процесу побудови молотильного апарату, обґрунтування принципової та функціональної схем зернозбиральної машини. Встановлено режими, за яких двигун енергетичного засобу працюватиме з оптимальним завантаженням. Висвітлено питання обслуговування та організації робіт із використанням розробленого молотильного апарату.
Вступ
Курсове проектування є навчальною частиною процесу. Мета курсового проекту із предмета “Конструкція, розрахунок і виробництво сільськогосподарських машин” – навчити студентів самостійно розраховувати і проектувати збиральні машини на основі знань, отриманих при вивченні дисципліни.
Актуальним завданням сільськогосподарських машин, господарства є гарантоване забезпечення нашої країни продовольством за умови збереження і підвищення родючості ґрунтів, зменшення енергоспоживання, охорони навколишнього середовища, його вирішенню особливо на етапі становлення багатоукладних форм господарювання, сприятиме впровадженню новітніх технологій і машин, зокрема комплексної механізації рослинництва і тваринництва на базі науково обґрунтованої системи машин.
Система машин – це сукупність машин. Взаємоузгоджених за технологічним процесом, техніко-екологічними параметрами і продуктивністю, за допомогою яких забезпечується механізація виробничих процесів. Розробляють таку систему з урахуванням основних природно-кліматичних зон. Її постійно удосконалюють, доповнюють і змінюють на основі досягнень науки і техніки.
Науково-технічний прогрес у галузі механізації сільськогосподарського виробництва спрямований на підвищення продуктивності праці за рахунок розробки і впровадження широкозахватних машин, збільшення їх робочих швидкостей, вантажопідйомності, універсальності.
1. Основні вимоги до проектованої машини і умов її експлуатації
1.1 Призначення машини та вихідні вимоги
РозроблюванамноюмашинаєаналогоммашинизбиральногокомбайнуСК-5«Нива».
ЗернозбиральнийсамохіднийкомбайнСК-5«Нива»призначенийдлязбираннязерновихколосових,зернобобових,круп’янихкультурінасінниківтравпрямимкомбайнуванням,підборуіобмолотухлібноїмасизвалків,їїскошуванняувалок.Застосовуючирізніприставки,комбайномможназбиратинасінникитрав,кукурудзуназерноісилос,соняшник,сою,бобовіікруп’янікультури.
Основнимивузламиє:жатка,молотарказмолотильним,сепаруючим,очищувальнимітранспортуючимпристроями,бункерзвивантажувальнимпристроєм,гідрофікованийкопнувач,абоподрібнювачсоломи,ходовасистема,двигун,кабіна,електро-ігідрообладнання,органикеруванняісигналізація.
Технічнахарактеристикакомбайна:
· Шириназахватужатки–4,1або5м;
· Пропускназдатність–5…5,5м/с;
· Продуктивністьзагодинучасу–7,2т.;
· Ширинамолотарки–1200мм;
· Діаметрбарабана–600мм;
· Конструктивнамасамашини–8060кг;
· Ріжучийапараткосілочноготипузкованимипальцямиізсталі20;
· Декадвохсекційна,зізміннимкрокомробочихпланок,зкутомобхватубарабана146˚;
· Тахометробертівбарабанаіпристрій,щодозволяєшвидшеізручнішерегулюватичислообертівбарабана,редукторобертів.
1.2
Вихідні
дані
для
проектування
і
розробки
конструкції
машини
Розроблюваназбиральнамашинапроектуєтьсядлязбираннязерновихкультур.
Вихіднимиданимидлявиконаннякурсовогопроектуєтехнічнезавданнянакурсовийпроект.
Темоюкурсовогопроектуєрозробкаконструкціїробочогооргануісхемзернозбиральноїмашини.
Згіднозавданнятипмашинипричіпнийзвласнимдвигуном.
Пропускназдатністьмолотарки–11,5кг/с;
Врожайність-40ц/га;
Робочашвидкість–2,0м/с;
Коефіцієнтвикористаннячасу–0,85;
Висотавстановленняріжучогоапарата–19см;
Хідножа–90мм;
Параметрипротирізальноїпластини:
а=25мм;в=37мм;h=65мм;
Щільністьсоломи–20кг/м3
;
Робочийорган,щовиноситьсядлярозробки–молотильнийапарат.
Агротехнічнівимоги
Основнимиагротехнічнимивимогамидорозроблювальноїмашиниє:
· Безвідмовність–комбайнповиненбезперервнозберігатироботоздатністьнапротязідеякогочасу,абодеякоговиробітку;
· Ремонтопридатність–властивістьмашинизаключаєтьсявпристосовностідопопередженняівиявленняпричинйоговідмови,атакожшвидкоготалегкогоремонту,доступностівузлівдошвидкоїзміниаборемонту;
· Працездатність–станмашини,приякомувоназдатнавиконуватизаданіфункції,зберігаючизначеннязаданихпараметріввмежах,встановленихтехнічноюдокументацією;
· Збереженість–властивістьмашинибезперервнозберігатисправнийіпрацездатнийстаннапротязітапіслязберігання,атакожпіслятранспортування.Цявластивістьхарактеризуєтьсяздатністюоб’єктапротидіятируйнуваннюістаріннювпроцесізберіганняаботранспортування;
· Технічнийресурс–напрацюваннямашинивідпочаткуексплуатаціїабойогопоновленняпісляремонтудонастаннякритичногостану;
· Строкслужби–календарнатривалістьексплуатаціїоб’єктавідйогопочатку,абопоновленняпісляремонтудонастаннякритичногостану;
· Високазносостійкість–здатністьмашини,вузлів,деталейневтрачатисвоїхвластивостейтарозміріввпроцесіроботи;
· Легкістьконтролюватистантадинамікуроботиагрегатівтаскладовихвузлівмашини;
· Простотаобслуговування,проведенняТО,легкадоступністьвузлів,щопотребуютьтехнічногоконтролю,перевірки.
Естетичнітаенергопомічнівимоги.
Особливостіформитаестетичностісільськогосподарськихмашин.
Підформоюрозуміютьзовнішніобриси,зовнішнійвиглядвиробу.Всільськогосподарськомумашинобудуваннірозрізняютьвідкритіформимашин,колипідкреслюєтьсяособливістьконструкції,призначенняробочих органівтапанелінесучихконструкційнадаютьїйзакритоговигляду.Третяформа–сукупністьдвохперших.
Формиокремихвузлів(складальниходиниць)неможнастворюватиувідривівідзагальноїформимашин.
Донайважливішихвластивостейкомпозиціїналежать:цілісність,виразність,статичність,динамічністьтаінше.
Художнєконструюваннясільськогосподарськихмашинєневід'ємнимвідїхконструюванняіспрямованеназабезпеченнякрасимашини.
Вимогидоскладовихчастинвиробу,сировини,експлуатаційнихматеріалів.
ВсіматеріалиікомплектуючівиробизанайменуваннямімаркамиповиннівідповідатизакладенимутехнічнудокументаціюівідповідатиДСТУ,ТУтаін.
Вибірматеріалівікомплектуючихвиробівповиннізабезпечувативиконанняпоказниківпризначення,експлуатаціїтаіншихвимог.
Вимоги до маркування
МаркуваннясільськогосподарськихмашинтаїїскладовихчастинповинневідповідативимогамГОСТ26828-86,кресленьтатакимтехнічнимвимогам:
- Намашиніповиннабутипаспортнатабличказнаписомтакогозмісту:найменуванняіпозначеннямашини,порядковийномермашинизасистемоюнумераціїзаводувиробника,ріквипуску;
Транспортнемаркування.
Основнінаписи:
1. Назвавантажоодержувача,повнаназвастанціїтаскороченаназвазалізниціпризначення,порядковийномервпартії(чисельник–номермісця,азнаменник–кількістьмісць).
2. Додатковінаписи:назвапунктувідправлення.
Інформаційнінаписи:масабруттотанеттовантажногомісця.
1.3.
Відомості
про
природно-кліматичну
зону
Таблиця1.1 -Середнятривалістьбезморозногоперіоду(150днів)
Степовазона
|
Середнійбагаторічнийперіод(дні)зтемпературамиповітрявищимиза |
| 0ºС |
+5ºС |
+10ºС |
+15ºС |
| 230-240 |
190-245 |
160-195 |
115-145 |
Таблиця1.2 -СумитемпературповітряустеповійзонінатериторіїУкраїни
Степовазона
|
Сумитемпературповітря |
| 0ºС |
+5ºС |
+10ºС |
+15ºС |
| 3000º-4000º |
3000º-3900º |
2800º-3500º |
2200º-3000º |
Найбільшізапасивологивґрунтіспостерігаютьсявесною,нимизабезпечуєтьсяврожайсільськогосподарськихкультурвумовахполивногоземлеробства.
Таблиця1.3 -Середнябагаторічнасумаопадів,мм.
| Степова зона |
Середня багаторічна сума опадів, мм. |
| За рік |
Холодний період (ХІ-ІІІ) |
Теплий період (ІV-Х) |
Січень |
Липень |
| 405-500 |
120-190 |
180-340 |
20-45 |
25-65 |
Південно-західнерозташуваннястеповоїзонивідносноїїєвразійськогопростяганнязумовлюєкліматичніхарактеристики,зокремавеличинисонячноїрадіації,тепловихресурсів,характерзволоженості,тривалістьбезморозногоівегетаційногоперіодівтаінше.Такрічнісумивеличинсонячноїрадіаціїстановлятьузонімішанихлісів4100МДж/м2,австеповійзоні–5230МДж/м2.Річнийрадіаційнийбалансзмінюєтьсявід1900до2210МДж/м2.Середнітемпературисічнязмінюютьсявід-7,6ºСнапівночізони,до-2ºСнапівдні,асереднялипневатемпературазмінюєтьсявідповідно,від+20ºСдо+24ºС.Річнасуматемпературвище+10ºСстановить2800ºС-3600ºС,щона600º-1000ºСбільше,ніжузонімішанихлісів.Безморознийперіодтриває160-220днів,аперіодактивноївегетації160-295днів.Середнірічнітемпературиповітряпідвищуютьсявід+7,5ºСнапівнічномусходідо+14ºСнапівденномусходізони.Степовазоназнаходитьсянапівденьвідосіпідвищеногоатмосферноготиску.Цевпливаєнахарактератмосферноїциркуляції.Тутпризагальномупереважаннізахідногоперенесеннявологихповітрянихмасуформуванністеповогокліматувеликурольвідіграютьсхіднійпівнічно-східніконтинентальні,атакожсередземноморськітропічніповітрянімаси.Частоатлантичніциклонинедосягаютьстеповоїзони,щоєпричиноюменших,порівнянозлісостеповоюзоною,річнихсумопадів.
Річнісумиопадівсягаютьвід450ммнапівночізонидо350ммнапівдні.До60–70%опадіввипадаєвтепловийперіодроку.Характерноюособливістюстепівєвисокавипаровуваність:700–880ммнапівночійдо900–1000ммнарікнапівднізони.Коефіцієнтзволоженнязмінюєтьсявід1,2до0,8.Дефіцитвологивстепувпливаєнасучасніфізико–географічніпроцеси,формуваннягідрографічноїмережі.Останнявстепуємалорозвиненою:середняїїгустотастановить0,08–0,005км/км2.Стікформуєтьсяпереважнозарахунокталихсніговихвод,якідають70–80%річногостоку.Атмосферніопадивліткувтрачаютьсяпередусімнавипаровування.Урежимістеповихрічокспостерігаєтьсякороткочаснатависокавеснянаповіньінизькалітнямежень.Підвищеннярівнівможливевліткупідчасзлив.
УпівнічнійпідзоніпереважаютьчорноземиПриазовськоївисочини(7,2%).Напівденьвідсмугисередньогумуснихчорноземівпоширенімалогумусні(вмістгумусу–5–5,8%).Наплакорахґрунтовийпокриводноріднийнасхилахпоширенівідмілизвичайнихчорноземів,натерасовихрівнинахрозвинутічорноземиталучно–чорноземніґрунти.НапівдніПричорноморськоїнизовинисформувалисьчорноземипівденні.Напівдністепувумовахрізкогодефіцитувологиглибинапромиваннягрунтівзменшується.Завдякицьомугіпспідтягуєтьсявгору.
1.3.1
Відомості
про
технологічні
процеси
Молотильнийапаратміститьусобімолотильнийбарабан,підбарабанникімеханізмрегулюванняпідбарабанника.Принципйогороботинаступний.Молотильнийбарабан,захоплюючипорціїрослинноїмаси,виконуєобмолотісепараціюсоломистоїкупизодночаснимпереміщеннямйогочереззменшуванийдовиходузазор,утворенийбичамимолотильногобарабанаіпланкамипідбарабанника.Післяпроходурослинної масичерезмолотильнийапаратусезернозколосьповиннебутивиділенойвосновномупросепарованочерезпідбарабанник.
Приводбарабаназдійснюєтьсявідвідбійногобітерачерезклинореміннийваріатор.Наприводібарабанавстановленийпристрійдляавтоматичногонатягуременяпропорційнопереданоїпотужності.
Керуютьчастотоюобертаннябарабаназкабіникомбайнера.
Підбарабанникодносекційний,оборотний,звареноїконструкції.Включаєдеку,вхіднийщиток,пальцевіґратиівідбивнийщитокзфартухом.
Дляпропорційноїзмінизазорівміждекоюібичамибарабана,аварійногоскиданняпідбарабанникапривипадковихзабиванняхмолотильногоапарата,атакожзапобіганнядекивідполомокпривлученнітвердихпредметівслужитьмеханізмпідвіскиірегулюванняпідбарабанника.
Зазориміжбичамибарабанаіпланкамидекипринеобхідностізаміряютьчерезлюкивпанеляхмолотарки.Дляправильноїроботимеханізмуназаводівстановлюютьзазори:навходінапереднійпланцідеки—18мм,навиході—2мм.
2.
Обґрунтування
параметрів
проектованої
машини,
її
робочих
органів
2.1
Обґрунтування
технологічних
параметрів
зернозбиральної
машини
ШириназахватукомбайнаВ
знаходитьсязнаступногорівняння:
q0
=А·В·
V
м,
(1)
деq0
–пропускназдатністьмашини,кг/с; А
–врожайністьусієїрослинноїмаси,щозбирається,кг/с; V
м
–швидкістьрухумашини,м/с.
МіжурожайністювсієїрослинноїмасиА
іурожайністюзернаАз
існуєзалежність:
А=
Аз___
(2)
1-β
деβ–коефіцієнтсоломистості(дляпроектнихрозрахунківприймаютьβ=0,6)
Тоді
В=
___
q0
_
(1-β),
Аз·
V
м
ДеАз
–вимірюєтьсявкг/м2
.
АбоВ
=100
·
q0
(1-β),
(3)
Азм
·
V
м
ДеАзм
вимірюєтьсявц/га.
В
=100
·
q0
(1-β)=
100
·11,5
·
(1-0,6)=1150
·
0,4=5,75м
Азм
·
V
м
40·
280
ДляподальшогопроектуванняівподальшихрозрахункахвякостіширинизахватукомбайнуВ
використовуєтьсяйогозначенняВ0
округленезточністюдо0,1м.
ГодиннупродуктивністьмашиниW
розраховуютьзаформулою
W=0,36·В
·V
м·
Ƭ
зм,
(4)
деƬзм–коефіцієнтвикористаннячасузміни.
W=0,36·В
·V
м·
Ƭ
зм
=0,36·5,75·2·0,85=3,52
2.2
Розрахунок
параметрів
ріжучого
апарата
Вихіднимиданимидлярозрахункуріжучогоапаратаєйоготип,висотавстановленняріжучогоапаратуНвст
,хідножаS
(тобтопереміщенняножаприйогорусізодногокрайньогоположеннявінше),крокріжучоїt
тапротиріжучоїt
0
частин,розмірипротирізальноїпластини.
Ніжусегментно-пальцевомурізальномуапаратіздійснюєзворотно-поступальний(коливний)рух,ацейрух,якправило,отримуютьзобертового
руху.Дляперетворенняостанньогоузворотно-поступальнийнайчастішевикористовуютькривошипно-шатунниймеханізм.Томуупроектірекомендуєтьсярозроблятизгадуваниймеханізмприводу.Протеможебутиірозробленийпривідниймеханізмзколивноюшайбоючиколивноювилкою.
Оскількипрактикоювстановлено,щокращимріжучимапаратомдлязернозбиральнихмашинзаякістюрізання,енергетичнимийексплуатаційнимипоказникамиєапаратнормальногорізаннязодинарнимпробігомножа,товкурсовомупроектіслідрозраховуватиіпроектуватитакийтипапарата.Останнійхарактеризуєтьсятим,щоS
=
t=
t0
;такимчиномt=
S
іt0=
S
.
Кутαвідхиленнялезсегментазнаходятьсязумови:
α+β
n
≤
φ
1+
φ
2
,(5)
деβ
n
–кутнахилулезапротирізальноїпластини;
φ1
іφ2
–куттертястеблавідповідновлезосегментаілезопротирізальноїпластини.Сумаφ
1+
φ
2
призбираннізернових,якправило,знаходитьсяумежах30º....75º.
РозмірисегментівтапротиріжучихпластинвизначаютьсяГОСТ158-74,протепривиконаннікурсовогопроектустудентамнеобхіднопідібратитакийпараметрсегментаe
,заякогобудевиконуватисьумова(5)
(рис.1).Дляцьогонеобхідновстановити,занаведенимиувихіднихданихрозмірамипротирізальноїпластини,кутнахилуїїлезаβ
n
,прийнятизначенняφ
1+
φ
2
ізнаведеногодіапазонутазазначеннямtg
α
визначитипараметрe
.

Користуючисьвикладенимивищеданими,визначаєтьсярадіускривошипамеханізмуприводу,будуєтьсятраєкторіярухуточоклезасегмента,визначаємошвидкістьрізання,площуподачі,площунавантаження,частотуобертаннякривошипатавідгинстебелприрізанні.
Уприводахсегментнихрізальнихапаратівтехнічноважковикористатиаксіальні(центральні)кривошипно-шатуннімеханізмихочабчерездуженизькерозташуванняповідношеннюдоґрунтуножа(повзуна),атомувикористовуютьсямеханізмизміщені(дезаксіальні)зпараметрамидляжатоккомбайнів:e
=2·
r
іɭ
=10·
r
,деe
–величинадезаксіалу,ɭ
-довжинашатуна[17].Хідножадлятакогомеханізмуприводустановить
S
=√(
ɭ
+
r)2
-
e2
-
√(
ɭ
-
r)2
-
e2
(6)
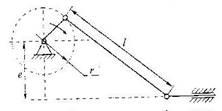
Рис.2.Схемадезаксіальногокривошипно-шатунногомеханізму
Якщоврахуватинаведенівищеспіввідношення,тоотримаємо
S
=2,04·r
(7)
Уподальшихрозрахункахслідкористуватисьотриманоюзалежністю.
Оскількиніжздійснюєколивнийрух,тойогошвидкістьзмінюєтьсявіднуляукрайніхположенняхдопевногомаксимальногозначенняусерединіходуножа.Утойжечасекспериментальновстановлено,щоприроботісегментногорізальногоапаратужатокіснуютьграничнішвидкостірізання,
нижчеякихнерекомендуєтьсязрізатистебла.Такішвидкостіназиваютьтехнологічними.Такдля
скошуваннязерновихтехнологічнашвидкістьстановитьVm=1,5м/с
[17].Тому,длязабезпеченняякісноїроботиріжучогоапаратумінімальнезначення,здіапазонушвидкостейприякихвідбуваєтьсязрізаннястебел,повиннобутибільшимзатехнологічнушвидкість.
Длявизначеннядіапазонузмінишвидкостейрізаннятакутовоїшвидкостіобертаннякривошипаукурсовомупроектірекомендуєтьсявикористовуватиграфічнийметод.ЗцієюметоюбудуютьграфікзміниробочихшвидкостейрізаннязалежновідпереміщенняножаX
умасштабіμ1=ω
,деω
–кутовашвидкістьобертаннякривошипаприводуножа.Оскількипроектуєтьсяріжучийапаратнормальноготипузодинарнимпробігомножа,товикреслюємоконтуродногосегментатаоднієїпротиріжучоїпластини,єтакожконтурлезасегментаудвохбіжучихположенняхA1B1
таA2B2
,щовідповідаютьвідповіднопочатку(дотикточкиA1
лезасегментазпротиріжучоюпластиною)тазакінченню(дотикточкиB2
лезасегментазпротиріжучоюпластиною)процесурізання(рис.3).Користуючисьприйнятиммасштабомбудуютьдіаграмузмінишвидкостірізанняувиглядіпівколарадіусомr
.
ОрдинатиA1а1
таA2а2
умасштабіμ1=ω
являютьсобоюшвидкістьпочаткуV
п
тазавершенняV
к
різаннярослин.ЗіншоїсторониданішвидкостінеповиннібутименшимивідтехнологічноїшвидкостіV
m
,томуможназаписати
V
п
=
A1
а
1·
ω
≥
Vm
(8)
V
к
=
A2
а
2·
ω
≥
Vm
(9)
ДеV
m=1,5м/с
Або
ωп≥
V
m
=___1,5_____
=139
(10)
A1а1
0,027·0,04
ωк≥
V
m
=
___1,5______
=58,7
(11)
A2а2
0,073·0,035
Значеннякутовоїшвидкостікривошипаω
,щозадовольняєумови(10)
і(11)
приймаютьдляподальшихрозрахунків.
Користуючисьприйнятимзначеннямω
розраховуютьзначенняV
п
таV
к
,атакожмаксимальнезначенняшвидкостірізанняVmin
=
r·
ω
.
Дляпобудовитраєкторіїточоклезаврахуємо,щоніжздійснюєскладнийрух:коливнийувідносномурусііпоступальнийвпереносномурусі.Ізпевнимдопущеннямможнарахувати,щопоступальнийрухвідбуваєтьсязпостійноюшвидкістюмашиниV
м
,аколивнийрухізпостійноюкутовоюшвидкістюобертаннякривошипаω
.
Зачасповоротукривошипанакутω·t=180º=π
рад,сегментножапереміститьсязкрайньоголівогоположеннявкрайнєправе,пройшовшиувідносномурусішляхS≈2·r
.Аупереносному,разомізмашиною,просунетьсянадеякувіддальL
,щоназиваютьподачею
L=
V
м·t=
V
м·
π
(12)
ω
де
L=90мм
ω
=
V
м·
π
=2·3,14
=6,98
L
0,90
Длясучаснихзернозбиральнихмашинподачанайчастішерівна50...90мм,томузначенняотриманезаформулою(12)
необхідноузгодитиізнаведенимимежами.Якщозначенняподачіперевищуєнаведенізначення,тонеобхіднозбільшитичастотуобертаннявалакривошипаприводуножа.Атакожпровестиперерахунокшвидкостейрізаннязаформулами(8)
і(9)
.
ТраєкторієюабсолютногорухудовільноїточкиА
ножаотримуютьграфічнимдодаваннямвідносноготапереносногорухів(рис.4).ДляцьогонаосіZ
відкладаютьвідрізокдовжиноюL
,ачерезточкуА
проводимопівколорадіусомr
.ПоділившинаоднаковукількістьчастокдугутаподачуL
,проводятьзточокдугивертикальніпрямідовзаємногоперетинузгоризонталямипроведенимичерезточкивідрізкаподачіL
.З’єднавши
плавноюкривоюточкиперетинуотримуємошуканутраєкторію.Рештаточокножабудутьрухатисьзаеквідистантнимитраєкторіями.
Длявизначенняплощіподачітаплощінавантаженнянеобхіднопобудуватидляпроектованогоапаратанормальногорізаннязодинарнимпробігомножадварядипротиріжучихпластинітриположеннясегмента,щохарактеризуютьйогоположеннязаодиноберткривошипа(рис.5).
Оскількикутнахилулезпротиріжучихпластинпроводятьсяпаралельноосьовимлініямпальців.Віддальміжлініямистановить(b+b1)/2
.ЯквідомоплощаподачіSп
–цеплощаполя,зякоїсегментзрізаєрослинизаодинповнийхідножа,аплощанавантаженняSн
–цеплощаполя,зякоїсегментзрізаєрослинибіляодногопальцязаповнийхідножа.ПриповоротівалакривошипанаодинобертвершинасегментаописуєкривуАВС
.Площа,обмеженацієюкривоюілінієюАС
,ібудеплощеюподачі(цепояснюєтьсятим,щосегментприрусізположенняІвположенняІІнезрізаєрослининаційплощі;зрізвідбудетьсятількиприрусісегментазположенняІІвположенняІІІ).Так,яквсірослинизрізуютьсябіляодногопальця(лініяАС),топлоща,обмеженакривоюАВСілінієюАС,будеодночасноплощеюнавантаження.Такимчином,вапаратінормальногорізаннязодинарнимпробігомножа,площаподачідорівнюєплощінавантаження.Віншихтипівапаратівціплощінерівні.
ПлощаSп
становить
Sп=
S·
L
,(13)
ДеL
-подача,щовизначаєтьсязаформулою(12)
.
Здіаграмиплощіподачівидно,щопроцесзрізустебелсупроводжуєтьсяпопереднімвідгинаннямїхурізнихнапрямах,унаслідокчогостернявиявляєтьсянеоднаковоютабільшою,ніжвисотазрізуНвст
,наякувстановленийрізальнийапарат.
Длявизначеннявідгинустебелприрізаннінеобхіднопобудуватисегментавдвохправихтадвохлівихположеннях,щовідповідаютьпереміщеннюзапівтораобертукривошипа.Лініїлезпротирізальнихпластин проводятьсяякіувипадкузпобудовоюплощінавантаження,паралельноосьовимлініямпальців(рис.6).
Приповоротікривошипанакутω·t=180º=π
сегментпереміститьсязположенняІвположенняІІ,аточкиАіВактивноголезабудутьрухатисьтраєкторіямиАА1іВВ1.РухточокСіDактивноголезасегментазположенняІІвположенняІІІвідбуваєтьсязатраєкторієюСС1іDD1.
Аналізуватислідвідгинстебел,розміщенихпоосьовійлініїпальця1.Тутстеблавідхиляютьсявправуілівусторони(поперечнийвідгин).Відгинq1,будерівнийполовиніширинипротирізальноїпластини(∼0,5·а).ВідхиленівправопальцемстебларозміщуютьсявздовжлініїК1Кпластини.Стебла,розміщеніналініїаb
,лезоАВзрізаєзвідгиномq1(зонаХнабоковомувиглядіполя,зображеномунарис.6справа).Наданійділянцівисотастерністановить
h1=√Нвст2
+q12
(14)
деq1
=а/2
h1=√1902
+12,52
=√36100+156,25=√36256,25=190,4
Рослинирозміщенізалінієюbс,відлініїК1КпальцяактивнимлезомCDприрусісегментазположенняІІвположенняІІІізрізуютьсябілялініїО1Опротирізальноїпластини2.
Приймаючи,щостеблаприпереходівідлініїК1КдолініїО1Орухаютьсязатимижтраєкторіями,щоіточкисегмента,знаходимо,щовідгинстебелзониY(поперечнийвідгин)q2будепостійнийдлявсіхстебеллініїbcірівнимвіддалівідпочатковогоположення(точкас)стебладомісцяйогозрізу(точкаn2).Висотастернітутh2дорівнює
h2=√Нвст2
+q22
(15)
Деq2
–віддальвідсдоL
h2=√1902
+902
=√36100+8100=√44200=210,2
Стебла,розміщеніміжточкамисіс1,незахоплюютьсясегментомприрусізположенняІІвположенняІІІ.ПальцевийбруснахиляєїхзанапрямкомрухумашинивточкуdітутвонизрізуютьсяактивнимлезомсегментаА2В2 прийогопереміщеннізположенняІІІвположенняIV.Цейвідгинq3
називаєтьсяпоздовжнім(зонаZнарис.6) Максимальнийвідгинq3
max
дорівнюєвіддалівідпочатковогоположеннястебла(точкас)доположення,девонобудезрізане(точкаd).Іншістеблабудутьзрізанітакожвточціd,алезменшимвідгином.ДлязониZвисотастернінепостійначерезте,щоq3≠
const
.
Максимальнависотастерніh3дляцієїзонивизначаєтьсязаформулою
h3=√Нвст2
+q32
(16)
h3=√1902
+552
=√36100+3025=√39125=197,8
Окрімh1,h2,h3набоковийвидпотрібнонанестивисотуНвст
.
2.3
Розрахунок
параметрів
молотильного
апарата
ОптимальнаколовашвидкістьбичамолотильнихапаратівVбвстановленавнаслідокекспериментальнихдосліджень,тривалоюпрактикою,ізалежитьвідсорту,вологостітаіншихвластивостейкультури,щообмолочується,іповинназнаходитисявнаступнихмежах:приобмолотізернових32-34м/с;приобмолотікукурудзи14-16м/с;приобмолотібобів,гороху,сої,соняшника14,5м/с;приобмолотіконюшини,люцерни,рапсу28-30м/с.ВиходячизцихданихвстановлюєтьсяшвидкістьбилаVб=32м/с.
ДовжинубарабанаLбвизначаютьзадопустимоюпитомоюподачеюнаодиницюдовжинибила:
Lб=__q0___
(17)
q0'·n1
деq0–пропускназдатністьмолотильногоапарату,кг/с;
q0'–допустимапитомаподачанаодиницюдовжинибила,кг/(с·м),q0'=0,50кг/(с·м);
n1–числобил,n1=12.
Lб=11,5
=11,5
≈2м
0,5·126
ДіаметрбильногобарабанаDвизначаютьзаформулою:
D=Vб·Δtср·
n1
(18)
Π
ДеΔtср–проміжокчасуміжударамипохлібніймасідвохсусідніхбичів,Δtср=0,005с.
D=32·0,005·12
=0,61м
3,14
ДіаметрибарабанівусучаснихкомбайнахколиваютьсявмежахD=450...700мм.Зернозбиральнімашинирозроблені“Ростовсільмашем”обладнанімолотаркамиздіаметромбарабана800мм.
Частотаобертанняnббарабанавизначаєтьсязаформулою:
nб=60·
Vб
(19)
π·D
nб=60·32_
=1002,4≈1000
3,14·0,61
Потужність,потрібнадляроботимолотильногопристрою,затрачаєтьсянаобмолотхлібноїмасиінаподоланняшкідливихопорів
N=N1+N2(20)
ДеN1–потужність,щозатрачаєтьсянапереборенняшкідливихопорів(опірупідшипникахтапередавальнихмеханізмах,опірповітря),кВт;
N2–потужність,щозатрачаєтьсянаобмолот,кВт.
N=N1+N2=1,46·10-3
+29,4=29,4кВт
Середнюпотужність,щовитрачаєтьсянаобмолот,N2визначаєтьсязаформулоюВ.П.Горячкіна
N2=q0·
Vб2
(21)
1000(1-f)
деf–коефіцієнтперетирання,характеризуєтьсяопоромдеки;f=0,6приобмолотісухоїмасизерновихкультур.
N2=11,5
·
322
=11776
=29,4кВт
1000(1-0,6)400
Середнюпотужність,необхіднудляподоланняшкідливихопорівN1визначаютьзаформулою:
N1=А´·
ωб
+
В´·
ωб3
(22)
1000
деА´іВ´-коефіцієнти,значенняякихотримуютьекспериментально:А´приймають0,004Н·м,аВ´приймають0,91·10-6
Н·м·с2
;
ωб–кутовашвидкістьобертаннябарабана,с-1
.
ωб=π·
nб
(23)
30
ωб=3,14·1000
=3140
=104,67
3030
N1=0,004·104,67+0,91·10-6
·104,673
=1,46·10-3
кВт
1000
Длянормальноїроботимолотильногоапаратунеобхіднодотримуватисьсередньоїлінійноїшвидкостіробочихорганів,оскількизбільшенняшвидкостіприводитьдозбільшенняподрібненнязерна,азменшеннявпливаєнанедомолот.Встановлено,щозмінасередньоїлінійноїшвидкостібарабанавмежах±7%невикликаєпомітногозбільшенняподрібненняабонедомолоту.
Подоланняопорів,щораптововиниклиприобертаннібарабана,відбуваєтьсязарахунокенергії,накопиченоївньому.Дляцьогомоментінерціїбарабанаповиненматипевнувеличину.
МоментінерціїбарабанаJвизначаєтьсязаформулоюВ.П.Горячкіна:
J=1000·N2
(24)
ωб·d
ωб
dt
деdωб/dt–можливекутовеприскореннябарабана,с-2
.
dωб/dt=12с-2
.
J=1000·N2
=1000·29,4
=23,4кг·м2
ωб·d
ωб
104,67·12
dt
Кутохопленнябарабанадекоюусучаснихзернозбиральнихкомбайнахвстановлюєтьсяумежах101...142º.Прицьомучимбільшадовжинадеки(чимбільшийкутохоплення)тимнижчийнедомолотколосківтапосилюєтьсясепараціязерна,алеутойжечасзбільшуєтьсяйогоподрібнення.Подовженнядекитакождосягаєтьсязарахунокзбільшеннядіаметрабарабанапризбереженніоптимальногокутаохоплення.Кутохопленняприймаємо130º.
2.4
Встановлення
параметрів
сепаратора
грубого
вороху
Соломотрясслідпроектуватиклавішнийдвохвальний.ШиринасоломотрясаBсдорівнюєдовжинібарабана:Bс=Lб.
УсучаснихзернозбиральнихкомбайнівчислоклавішприBс<1200ммдорівнюєчотирьом,при1200<Bс≤1500ммклавішможебутичотиричип’ять,колижBс≥1500ммточислоклавішякправилорівнешести.Ізцихроздуміввстановлюєтьсячислоклавіш.Ширинуоднієїклавішіприймаютьумежах200...300мм.
200:6=33,333
Радіускривошипавалаr,рекомендуєтьсябрати50мм,вцьомувипадкучастотаобертанняnсможебутивдіапазоні195...215об/хв.
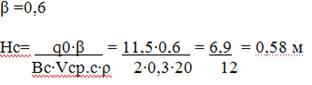
ВисоташарусоломиНснасоломотрясвизначаєтьсязаформулою:
Нс=q0·β
(25)
Bс·Vср.с·ρ
ДеVср.с–середняшвидкістьрухушаруворохупосоломотрясу,длясучаснихкомбайнівVср.с=0,3...0,4м/с,приймаємоVср.с=0,3м/с.
ρ–щільністьшарусоломи,щознаходитьсянасоломотрясі(узавданніρ=20кг/м3
).
ЗарозрахованимзначеннямНс,визначаютьрозташуваннядахумолотарки.
Длявизначеннядовжинисоломотрясанеобхідноспочаткувизначитикоефіцієнтсепараціїμс.Експериментальнимидослідженнямидоведено,щокоефіцієнтсепараціїμсвзалежностівідтовщинишаруумежах,щомаютьпрактичнезначеннядляроботисоломотрясів,змінюєтьсязазакономрівносторонньоїгіперболи,взв’язкузчимупершомунаближенніможназаписати:
μ
=Нс
(26)
μсН
деμ–коефіцієнтсепараціїдлявідомоїтовщинишаруНсоломи,см-1
.
ЗначеннякоефіцієнтасепараціїμдлядвохвальногоклавішногосоломотрясапривисотішарусоломиН=200мм,складаєμ=0,018см-1Т
Тодізначеннякоефіцієнтаμсдляпроектованогосоломотрясастановитиме:
μс=0,018·200
=3,6
см-1
(27)
НсНс
μс= 3,6
=0,006см-1
580
Якщовважати,щопросіюваннязерна,віднесенедоодиницідовжинисоломотряса,заодиноберткривошипа,однаковезавсієюйогодовжиною,тозакожнепідкиданнябудепросіюватисяоднаковакількістьзернаувідсоткахвіднаявногоусоломінапочаткуданоїділянки.
Затакоїумови,рівнянняпросіюваннязернанасоломотрясізапишетьсяутакомувигляді
y=а·е-μсх
(28)
деy–кількістьзернанарозглядуванійділянцісоломотряса,кг/с;
а–подачазернанасоломотряс,кг/с;
х–довжинашляху,щопроходитьворохпосоломотрясу,см;
е–основанатуральногологарифма.
ТеоретичнудовжинусоломотрясаLm(рис.6),заякуприймаютьвіддальпогоризонталівідцентрувалабарабанадокінцясоломотряса,можнавизначитиіззагальногорівнянняпросіювання,замінившивньомукоординатуx
теоретичноюдовжиноюсоломотрясуізадавшиськількістюзернавсоломінакінцісоломотрясуyс:
yс=а·е-
μс
L
m
(29)

Рис.7.Схемасоломотряса
Якщодопустити,щоразомзсоломоюізсоломотрясуможесходити0,25%зерна,тоyс=0,0025·а.Арозв’язавширівнянняпросіювання,отримаємовираздлярозрахункутеоретичноїдовжинисоломотрясу:
Lm=6/μс(30)
Lm=6/0,006=1000см=10м
ДовжинасоломотрясуLс(рис.6)прикутійогонахилуαснавіддалівідцентрабарабанадопочаткуклавішL1визначаєтьсязаформулою:
Lс=L
m
-
L1
(31)
Cosαс
деαс–рекомендовановмежах5...10º. ВрахуваннявіддаліL1пояснюєтьсятим,щосепараціярозпочинаєтьсяумолотильномуапараті.Длямолотильнихапаратівзрешітчастоюдекою залежновіддіаметрабарабанаданавіддальстановитьL1=600...900мм.ПриймаємоL1=900мм.
Lс=L
m
-
L
1
=10-0,9
=9,1
=9,3м
сosαс0,980,98
2.5.
Розрахунок
параметрів
зерноочистки
ШиринарешетаBрзв’язаназшириноюсоломотрясаBсспіввідношенням:
Bр=(0,90...0,95)Bс(32)
Bр=0,9·2=1,8м
Bс=2м
Bр=Bв=1,8м
ПлощарешетаочисткиFрвизначаєтьсязадопустимимпитомимнавантаженнямна1м2
Fр=qв
(33)
qf
деqв–подачаворохунаочистку.
Подачаворохуqврівна:
qв=q0(1-k0·β)(34)
деk0–коефіцієнт,щовраховуєнаявністьдрібноїсоломиуворосі,щопотрапиланаочистку,k0=0,4...0,9.Приймаємоk0=0,5.
Длякомбайновихрешетqf=1,5...2,5кг/(с·м2
).Приймаємоqf=2кг/(с·м2
).
qв=11,5(1-0,5·0,6)=8,05кг/с
Fр=8,05
=4,03м2
2
ДовжинарешетаLррівна
Lр=Fр
(35)
Bр
Lр=4,03
=2,2м
1,08
Кутнахилурешітдогоризонтускладає0...4º,кутнахилуподовжувачадогоризонту12...15º.
Амплітудаколиванняверхньогорешетаскладає55...65мм,нижньогорешета35...40мм.Кінематичнийрежимроботирешіточистки
к=r·
ω2
=2,2...3,0(36)
g
деω
–кутовашвидкістьобертаннякривошипамеханізмупривода,с-1
;
r–радіускривошипа,м;
g–прискореннявільногопадіння,м/с2
.
Швидкістьповітрянадзадньоютасередньоючастинамирешетаповиннабути3,8м/с,анадпередньоючастиною5,8м/с.
ВочистцізернозбиральногокомбайнанайчастішевикористовуютьсявідцентровівентиляторинизькоготискуН≤1000Па
Дляствореннявідповідногорухуішвидкостіповітрявочистцівентиляторповиненстворювативідповіднийтискповітрязметоюподоланнярізногородуопоріввканалахіпроміжкахочисткитаузазорахміжжалюзямирешіт.
РобочашвидкістьповітряногопотокунавиходіVрnповиннабутивαвразбільшекритичноїшвидкостіVкрдлятихкомпонентіввороху,котріповиннівиноситисязазонуочисткитобто
Vрn=αв·Vкр(37)
Длясоломидовжиноюдо200ммαв=1,1...1,7,дляполовиαв=1,9...3,7ідлязбоїниαв=2,5...5,0.КритичнашвидкістьзернаVкр=8,0...11,5м/с,адляполовиVкр=0,75...5,25м/с.Алезметоюусуненнявтратзернавидуваннямйогоізполовою,робочашвидкістьповітряногопотокунеповиннаперевищуватизначеннякритичноїшвидкостідлязерна.Приймаємоαв=2,5іVкр=5,8м/с.
Vрn=2,5·5,8=14,5м/с
НеобхіднавитратаповітряQввентиляторомдлярозділенняворохудорівнює:
Qв=qв
,(38)
k1·ρn
деk1–коефіцієнт,щовраховуєконцентраціюматеріалу,щовидаляється,уповітряномупотоці(k1=0,2...0,3).Приймаємоk1=0,3;
ρn–густинаповітря(рівна1,2кг/м3
).
Повнийтиск,щоповиненстворювативентиляторстановить
h=hs+hd(39)
деhs–статичнийтиск,щозатрачаєтьсянаподоланняопорів,Па;
hd–динамічнийтиск,необхіднийдлянаданняповітрюкінетичноїенергії,Па.
Динамічнийтиск
hd=Vрn2
·
ρn
(40)
2
hd=14,52
·1,2
=126,15Па
2
Статичнийтиск
hs=hd(1-k2
)
(41)
k2
деk=Fе/F,тутF–площавихідногоотворувентилятора,аFе–площаеквівалентногоотвору(задосліднимиданимиk=0,5).
hs=126,15(1-0,52
)
=378,45Па
0,52
h=hs+hd=378,45+126,15=504,6Па
Теоретичнийтиск(енергія1м3
повітря)становить
Hт=h/ɳ(42)
Деɳ-ККДвентилятора(ɳ=0,7)
Hт=504,0,7=720,86Па
ДіаметрвхідногоотворуDо(рис.8)визначаєтьсязаформулою:
Dо= 2,57√∆·λ0·Qв
,(43)
µ0·n·(1-φ0)
де∆-коефіцієнтвикористаннявхідногоотвору(∆=0,55);
λ0=Dо/D1≈1,9–відношеннядіаметрувхідногоотворукожухаDоівнутрішньогодіаметраколесавентилятораD1;
µ0–коефіцієнтпідтискуванняпотоку(µ0=1,0);
n–частотаобертанняколесавентилятора(n=1000об/хв);
φ0–коефіцієнтпопередньогозакручуванняпотоку(φ0=0,42).
Dо=2,57√0
,
55·
1,9·22,4
=2,57√0,04=2,57·0,02=0,51м
1·1000·(1-0,42)
Рис.8.Схемавідцентровоговентиляторадвобічноговсмоктування.
ЗовнішнійдіаметрколесаD2дорівнює
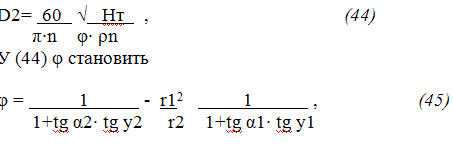
деα1іα2–кутинахилулопатідорадіус-векторавідповіднонавходітавиходіповітряногопотоку;
y1іy2–кутивідхиленняабсолютноїшвидкостіповітрявідпереносноївідповіднопривходіналопатьтасходженнізнеї;
r1=D1/2,r2=D2/2–внутрішнійтазовнішнійрадіусиколеса.
Дляпроектнихрозрахунківможнаприйматиα1≤25º;y1=45º;y2=2º;r1/r2=0,4.
φ=1
-0,161
=0,99-0,16·1,89=0,69
1+0,17·0,041+0,47·1
α2=arcsin[(D1/D2)·sinα1](46)
α2=arcsin[(D1/D2)·sinα1]=arcsin[0,4·0,42]=arcsin[0,168]=9,7
Потужність,щовикористовуєтьсявентилятором,Nврівна
Nв=Qв·Hт
(47)
ɳп
деɳп–ККДпередачі(ɳп=0,95)
Nв=22,4·720,86
=16,997кВт
0,95
ШиринувентилятораВвприймаютьрівноюширинірешетаабогрохота.Висотувихідногоотворувентилятораsвизначаютьзаформулою:
деa–координатапередньогокінцярешетавідносноверхньогоребраканалу;
β–кутрозширенняпотоку(β=12º);
δ–кутнахилуповітряногопотокудоплощинирешета(δ=30º);
k0'–коефіцієнт,щовраховуєвідхиленняпотокуповітрярешетом,(k0'=0,6).
a=(cosβ/sin(δ-β)-k0')·S–Lp=(cos12/sin(30-12)-0,6)·0,86-2,2=
=(0,97/0,29-0,6)·0,86-2,2=0,62м
З(49)розраховуєтьсяпараметрa,післячогопотрібновизначитикоординатуbпередньогокінцярешетавідносноверхньогоребраканалу(рис.8)заформулою:
b=a·tg(δ+β),(50)
b=0,62·0,9=0,56м
Рис.9.Схемадовизначеннярозташуваннявихідногоканалувентилятора.
3.
Обґрунтування
до
побудови
схем
машин
3.1
Обґрунтування
функціональної
схеми
Завданнямобґрунтуванняфункціональноїсхемимашинивходитьвибіртипівробочихорганів,взаємногоїхрозташування,визначеннярозмірівтарежимівобробки,щозабезпечуютьвиконаннявимогтехнічногозавдання.Основнимзавданнямнаданомуетапіпроектуванняєзабезпеченнянеобхідногорівняагропоказників.Формальнихметодівпобудовифункціональноїсхеминеіснує.Дляпобудовивиходятьзаналізуконструкціймашинаналогів.Використовуючинаведенівищеданібудуютьможливіваріантифункціональноїсхеми,вякійсукупнадіяробочихорганівнаоброблювальнийматеріалзабезпечуєнеобхіднуякістьвиконанняробітусільськогосподарськомувиробництві.Ціваріантилогічноаналізуютьстосовноможливостіуподальшомузабезпеченнявиконаннясукупностііншихвимогтехнічногозавдання:технологічних,ергономічнихіт.д.
Такимчиномможебутистворенокількаваріантівфункціональноїсхеми,логічнийаналізякихзабезпечитьвибірраціональнішої.Прицьомувраховується,щовзаємнерозташуванняробочихорганівповинно забезпечуватистабільністьтанадійністьробочихпроцесів,виконуванихробочимиорганами,їхраціональнезавантаження,збереженнянеобхідноїякостіоброблювальногоматеріалу.Функціональнасхемаєосновоюдляпобудовиіншихсхеммашини.
3.2
Обґрунтування
кінематичної
схеми
Обґрунтуваннякінематичноїсхеми(КС)міститьвирішеннязадачзвиборутипівмеханізмів,приводу,регулюваннятакерування,передатнихчиселчиспіввідношеньтавизначеннякінематичниххарактеристикелементівталанок,щозабезпечуютьвиконаннявимогтехнічногозавдання.Зарезультатамиїхрішеннянеобхідноотриматиданідляпобудовитакоїзв’язноїпослідовностікінематичнихланок,якаприпередачірухувідджерелаенергіїзабезпечуєнеобхіднийрухвсіхосновнихтадопоміжнихорганівзамінімальногочислапередатнихмеханізмів,джереленергії,найбільшпростомуконтурііраціональнихзв’язках.
3.2.1
Вибір
типів
механізмів.
На
цьому
етапі
обґрунтування
КС
вибираються
передачі
та
інші
механізми,
з
яких
утворюються
кінематичні
ланцюги
для
здійснення
руху
робочих
органів
від
джерел
руху.
Таквідомо,щозаміналанцюговихпередачклинопасовимизабезпечуєзменшеннявитратматеріалу,трудомісткістьвиготовленняімасимашини,апідчасексплуатації–доусуненняшумутапідвищеннянадійностіроботи.
3.2.2
Удосконалення
КС
машини.
У
процесі
вдосконалення
КС
машини
покращують
технічні
показники
призначення.
Існують
різноманітні
шляхи
покращення
КС,
один
з
них
–
вибір
раціональної
передачі.
З
основних
шляхів
раціоналізації
слід
відмітити
також
наступні:
скорочення
кількості
ланок
та
механізмів;
об’єднання
привода
для
поряд
розташованих
робочих органів;
силове
розвантаження
привода
за
рахунок
швидкісного
режиму;
скорочення
номенклатури
ланок
привода;
об’єднання
робочих
органів.
3.2.3
Обґрунтування
кінематичних
характеристик
елементів.
Під
час
обґрунтування
кінематичних
характеристик
визначаються
передатні
числа
всього
приводу
та
окремих
елементів,
частоти
обертання
валів
і
попередньо
для
пасових
передач
діаметри
шківів,
типи
та
розміри
паса;
для
ланцюгових
передач
тип
та
крок
ланцюга,
кількість
зубів
зірочки;
для
зубчастих
–
тип
зчеплення,
профіль,
кількість
зубів,
міжвісеву
віддаль
і
т.д.
3.2.4
Силовий
розрахунок.
На
наступному
етапі
здійснюють
розрахунок
зусиль,
що
діють
на
елементи
привода.
Вихідними
даними
є
зусилля,
що
діють
на
робочі
органи
та
інерційні
сили
кінематичних
ланок.
3.2.5
Енергетичний
розрахунок.
У
випадку
коли
відоме
зусилля
опору
Р,
що
діє
на
робочий
орган,
то
необхідну
потужність
для
його
приводу
визначають
за
формулою
N=P·V
ДеV–швидкістьпереміщенняробочогооргану,м/с.
УвипадкуколивідомиймоментопорунаробочомуорганіТ,тонеобхіднупотужністьдляйогоприводувизначаютьзаформулою
N=Т·ω,
Деω–кутовашвидкістьобертанняваланаякомузакріпленийробочийорган,с-1
.
Зарозрахованимизначеннямипотужностітадіючихзусильможназдовідниківвибратистандартизованіелементикінематики(паси,ланцюги,муфти,шестерні,редуктори,карданніпередачііт.д.).Знаючипотужністьприводуробочихорганівможнавибратиджерелорухутарозрахувати,наприклад,длямобільноїмашинипотужністьнавалувідборупотужності.
3.3
Обґрунтування
принципової
схеми
Принциповасхема,абоякїїназиваютьнапрактицікомпонувальна,визначаєповнийскладелементівсільськогосподарськоїмашиниізв’язківміжними,іякправило,даєдетальнеуявленняпроструктурутапринципроботисільськогосподарськоїмашини.
Загальнекомпонуваннярозроблюваноїмашини,асамерозробкаїїпринципової(компонувальної)схеми,виконуєтьсяякправилотількипіслявиборутаобґрунтуванняробочихорганів,механізмівприводутакеруванняіпринеобхідностіспособуагрегатування.Загальнекомпонуванняпочинаєтьсязрозміщенняробочихорганівабоїхелементівупорядкувиконаннязаданоготехнологічногопроцесуроботи.Тобтоприкомпонуванніважливовмітивиділятиголовнездругорядногоівстановлювативірнупослідовністьрозробкиконструкції.Спочаткурозміщаютьнайгроміздкішітанайскладнішіробочіоргани,розташовуючиїхупорядкуотриманомупривиконанніфункціональноїсхеми,апотімвженавколонихйвідноснонихкомпонуютьіншіробочіоргани,механізмиприводутавиконавчімеханізми,зурахуваннямтраєкторійрухутарозмірамиотриманимиприобґрунтуваннікінематичноїсхеми
Робочіоргани,допоміжніелементи,механізмиприводутакеруваннявиконуютьзанеобхідності,упрозоромувигляді,вдійснійабоспрощенійформідлязабезпеченняможливостібачитибудь-якіконструктивніелементивиробупринакладанніїходиннаодногоуоднійпроекції.
Необхідноматинаувазі,щопочатковийваріантсхемиможекоригуватисьприрозробціробочоїконструкторськоїдокументації–кресленьскладальниходиницьтадеталей.Всвоючергупобудовапринциповоїсхемиможевноситизміниуфункціональну,кінематичнутаіншісхеми.
Принциповусхемувиконуютьзтакоюкількістюпроекційтавидів,якапотрібнадлявизначеннявсіхнеобхіднихрозміріввиробуізабезпеченняраціональноговзаємногорозташуваннявсіхелементівконструкції.
4.
Розробка
конструкції
складальних
одиниць
і
деталей
Розробкоюробочихкресленьконструкційскладальниходиницьідеталейзакінчуєтьсястворенняграфічноїчастиниконструкторськоїдокументаціїітакимчином,закінчуєтьсяроботаконструкторанадвиконаннямвимог“Технічногозавдання”.
Прирозробціскладальниходиницьвстановлюєтьсятакийсклад,компонування,форма,основнірозміриіспряженняскладовихдеталейтатехнічнівимоги,щозабезпечуютьїїпрацездатність.
Підчасрозробкиконструкційскладальниходиницьідеталейдоцільнодотримуватисьнаступноїпослідовності.
4.1.Вивчення,доповненнятаформуваннявимогвисунутихдоконструкціїскладальноїодиниці.
4.2.Аналізконструкціїскладальноїодиницізасхемамистосовнокращоговиконанняпокладенихнанеїфункційівідповідностііншимвисунутимвимогамдоскладальноїодиниці,внесеннязанеобхідностізмінусхемимашини.
4.3.Аналізконструкціїскладальноїодиницізасхемамистосовнозабезпеченнянадійності,довговічності,технологічності.Внесеннявідповіднихзміндосхеммашини,оцінкараціональностірозрахунковоїсхеми,видунавантаження,виборунавантаженогосічення,ступенярівномірностіміцностіскладовихчастин,компактностіконструкції,способуфіксаціїдеталейіточностіїхвзаємногорозташування.
4.4.Виконаннярозрахунківпов’язанихзвизначеннямзусиль,щодіютьнаскладальнуодиницюврізнихїїчастинахзурахуваннямрежимузавантаженості,розрахунокнаміцність,жорсткість,довговічність.
4.5.Формуваннятехнічнихвимог,щозабезпечуютьпрацездатністьскладальноїодиниці(ГОСТ2.316-68).
4.6.Вибірмасштабу,позначеннягабаритів,розмірівівикреслюванняосьовихлінійтаосновнихелементівконструкціїскладальноїодиниці.Виконаннякресленняскладальноїодиницінайкращездійснюватиумасштабі1:1,якщодозволяютьгабаритнірозміриоб’єкту.Затакихумовпростішевибратинеобхіднірозміритасіченнядеталей,отриматиуявленняпроспіврозмірністьскладовихчастинскладальноїодиниці,міцністьтажорсткістьдеталейтаконструкціїзагалом.Розміридеталейпридеталюванніможнабратибезпосередньозкреслення.
4.7.Виконанняетапів4.1.–4.6.стосуєтьсяірозробкиконструкціїдеталі.Кресленняскладальноїодиниціідеталейвиконуютьвідповіднодо ГОСТ2.109-73зпостановкоюнеобхіднихрозмірів,вказуваннямтехнічнихвимогтаскладаннямспецифікаціїнаскладальніодиниці.
4.8.Накресленніскладальноїодиниціпроставляютьтритипирозмірів:робочірозміри,якихдотримуютьсяабозабезпечуютьпідчасзбирання,складання;технологічні–розмірипотрібнідлявиборуобладнання,пристосуваньінеобхідногомісцядлязбирання(посадки,габаритнірозміриіт.д.)таприєднувальні(параметримісцькріпленняскладальноїодиницідорамимашиничиіншихскладальниходиниць,діаметривихіднихкінціввалівіт.д.).
Трудомісткістьвиготовленняскладальниходиницьтадеталейєоднимзоб’єктивнихпоказниківтехнологічностіконструкції.Першзавсетрудомісткістьзалежитьвіддосконалостіконструкціїскладальноїодиниціідеталей.Складнаконфігурація,точністьвиготовлення,чистотаобробкиповерхніповиннібутимінімальнодопустимими.Томувженацьомуетапідоцільнопровестиопрацюванняскладальноїодиниціідеталей,визначившизміни,щовносятьсявїхконструкцію.Утойжечаснепотрібношкодуватизатратнавиготовленнядеталей,щовизначаютьнадійністьскладальноїодиниці,оскількивкінцевомурахункуцезабезпечуєпозитивчереззбільшеннясумарноїкорисноївіддачімашини,зменшенняпростоївтавартостіремонтів.
Деякіприйомизабезпечуютьпокращеннядекількохтехнічнихпоказників.Такуніфікаціяпокращуєпридатністьскладальноїодиницідоскладаннятарозбирання,скорочуєноменклатуруматеріалів,інструментівіобладнаннявпроцесівиготовлення,експлуатаціїтаремонту,щовсвоючергувизначаєпокращеннятехнологічностііпідвищеннянадійностіскладальноїодиниці.
5.
Організація
робіт
із
застосуванням
проектованої
машини
Заходизорганізаціїробітрозробляютьсязметоюреалізаціїупроцесіексплуатаціїпоказниківтехнічногозавдання.Вонивключаютьдопоміжніпроцесизпідготовкимашинидороботи,зпідготовкимісцяроботи(поля),іззабезпеченняроботимашинисільськогосподарськимитаексплуатаційнимиматеріаламиаботранспортомдлявідвезенняпродукції.
5.1
Заходи
з
підготовки
машини
до
роботи
Цізаходиповиннібутинаправленінадосягненнядвоякоїмети.По-перше,забезпеченнянеобхідноїякостівиконаннясільськогосподарськихробітшляхомрегулюванняробочихорганів,встановленнямвідповіднихзазорів,робочихкутів,режимівобробки.Дляцьогонеобхідновказати,длячоготауякихмежахтауякійпослідовностіслідпроводитирегулювання,використовуючиданізобгрунтуванняфункціональноїікінематичної(гідравлічної),пневматичної,електричноїсхем.По-друге,забезпечитинеобхіднунадійністьконструкціїшляхомвпровадженнязаходівтехнічногообслуговуваннятапоточногоремонту.Дляцьогонеобхідноописатипослідовність,періодичністьпроведеннявидівтехнічногообслуговування,їхзміст,видсервісногообладнання,назвунеобхіднихексплуатаційнихматеріалівтазапаснихчастин.
5.2
Заходи
з
підготовки
поля
до
роботи
Цізаходиспрямованінаскороченняневиробничогочасу,щозатрачаєтьсяназдійсненняхолостихходівузагінціізабезпеченнянеобхідноїпродуктивностімашинитаагрегату.Дляцьоговказуєтьсяраціональнийспосібрухувзагоні(безпетлевий,човниковий,круговийіт.д.)зобґрунтуваннямширинигону,зурахуваннямобкошувань,прокосівіпротипожежногооборювання.
5.3
Заходи
із
забезпечення
проектованої
машини
чи
агрегату
транспортними
засобами
Цізаходиспрямованіназниженняпростоївагрегатуізабезпеченнянеобхідноїпродуктивності.Прицьомукеруютьсяспіввідношеннямтранспортногоциклутачасомзаповненнябункераабовитратматеріалу,щоєуньому.
Список
літератури
1. АзовцевН.Г.,БакчеевВ.Е.Практикумпозерноуборочныммашинам.–М.:Агропромиздат,1987.–223с.
2. АлферовС.А.Воздушно-решетныеочисткизерноуборочныхкомбайнов.–М.:Агропромиздат,1987.–159с.
3. ВойтюкД.Г.,ГаврилюкГ.Р.Сільськогосподарськімашини.–К.:Каравела,2004.–552с.
4. ГапоненкоВ.С.,ВойтюкД.Г.Сільськогосподарськімашини.–К.:Урожай,1982.–312с.
5. ГевкоБ.М.Технологіясільськогосподарськогомашинобудування.–К.:Кондор.2006.–486с.
6. КарпенкоА.Н.Сельскохозяйственныемашины.–М.:Колос,1979.–472с.
7. КленинН.И.идр.Сельскохозяйственныемашины.–М.:Колос,1970.–456с.
8. КомаристовВ.Ю.,ДунайМ.Ф.Сільськогосподарськімашини.–К.:Вищашкола,1987.–486с.
9. ЛистопадГ.Е.Сельскохозяйственныеимелиоративныемашины.–М.:Агропромиздат,1986.–688с.
10. Лур’єА.Б.Курсовоеидипломноепроектированиепос/химелиоративныммашинам.–М.:Колос,1981.
11. Лур’єА.Б.Сельскохозяйственныемашины.–Л.:Колос,1983.–496с.
12. МорозовА.Ф.Зерноуборочныекомбайны.–М.:Агропромиздат,1991.–208с.
13. ПогорілецьО.М.Зернозбиральнікомбайни.–К.:Урожай,1990.–224с.
14. ПортновМ.Н.Зерноуборочныекомбайны.–М.:Агропромиздат,1985.–304с.
15. УстиновА.Н.Сельскохозяйственныемашины.–М.:ИРПО,2000.–264с.
16. ШматК.І.,СамарінО.Є.Теоріяірозрахунокзернозбиральнихкомбайнів.–Херсон:ОЛДІ-плюс.2003.
|