Розрахунково-пояснювальна записка
До курсової роботи з основ теорії систем та системного аналізу:
Дослідження властивостей технологічного агрегата як многомірної системи
Одеса - 2010
1. Еквівалентні та апроксимаційні перетворення моделі
1.1 Нелінійна модель агрегату
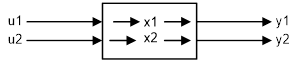
На прикладі розглянемо конкретну технічну систему - змішувальний бак:

Рисунок 1. Модель бака.
F1
,F2
,F - витрати рідини на притоці і витоці системи, м3
/с;
C1
,C2
,C - концентрація на витоці і притоці системи, кмоль/м3
;
h - рівень рідини в бакові, м; S - площа бака, м2
;
V - об'єм рідини в бакові, м3
;
Запишемо рівняння системи в стаціонарному (встановленому) стані, коли притік дорівнює витоку (рівняння матеріального балансу):
F10
+F20
-F0
=0; C1
 , ,
де індекс 0 означає встановлений стан.
Записавши умови балансу кінетичної і потенціальної енергії на виході із бака
 , ,
де
p - густина рідини, кг/м3
;
w - швидкість витоку, м/с;
q - прискорення вільного падіння,q=9.81 м/с2
;
і припускаючи, що
d - діаметр вихідного трубопроводу, м.
Одержимо:
 чи, відповідно, чи, відповідно,
 , де , де
k - коефіцієнт.
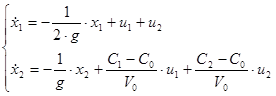
При зміні витрат у системі відбувається накопичення речовини і перехід до нового встановленого стану. Цей перехідний процес описується диференціальними рівняннями

де dv/dt - приріст об'єму рідини,  - приріст маси рідини. - приріст маси рідини.
Наведемо цю систему у стандартному вигляді:
Позначимо:
 − зміна у часі відхилення витрати від номінального щодо першого каналу − зміна у часі відхилення витрати від номінального щодо першого каналу
 − теж щодо другого каналу − теж щодо другого каналу
 − зміна у часі відхилення об'єму від номінального у бакові; − зміна у часі відхилення об'єму від номінального у бакові;
 − відхилення концентрації від номінальної; − відхилення концентрації від номінальної;
 - зміна втрати на виході; - зміна втрати на виході;
 - зміна концентрації на виході. - зміна концентрації на виході.
1.2 Нелінійна модель в стандартній формі
Розглянемо поповнення бака від 0 до номінального значення витрати з урахуванням приросту поданого лінеаризованій моделі. Таким чином, розглянемо стрибок u1
=0,03; u2
=0.
Позначивши  , рівняння бака запишемо у вигляді системи: , рівняння бака запишемо у вигляді системи:
Перше рівняння є нелінійним зі змінними що розділяються

З урахуванням того, що  запишемо: запишемо:
 , ,
чи підставляючи

Виразимо 
Підставляємо  та та 
Таблиця 1.
| y1 |
0.141 |
0.142 |
0.143 |
0.144 |
0.145 |
0.146 |
0.147 |
0.148 |
0.149 |
0.150 |
0.151 |
| t, с |
0 |
1.5 |
3.188 |
5.116 |
7.357 |
10.026 |
13.315 |
17.585 |
23.643 |
34.072 |
68.958 |

1.3 Отримання квадратичної моделі
Рівняння квадратичної моделі має вигляд:

Матриці з підстановкою номінального режиму:


1.4 Запис білінійної моделі






1.5 Лінеаризована модель
Лінеаризуємо залежність  , розклавши її на ряд Тейлора. , розклавши її на ряд Тейлора.

З урахуванням раніше викладеного запишемо:

 ; (т.к ; (т.к  ), где ), где  ; ;

Припустивши у випадку остатку  . Тоді підставивши похідну . Тоді підставивши похідну  , отримаємо , отримаємо
 ; ;


В результаті маємо
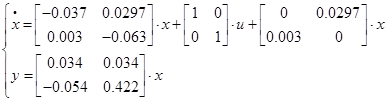
Представивши цю систему в матричній формі:

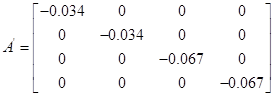
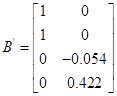
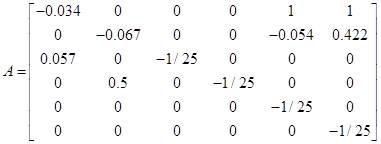
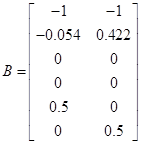
Тоді матриці А і В запишуться в вигляді
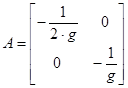 , , 
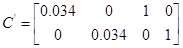
Для визначення матриці С необхідно встановити зв'язок між векторами x и y. Оскільки  , ,  , то , то
 ; ;   , то , то 
Тоді

Система буде мати вигляд
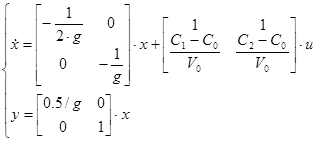
Коефіцієнти моделі системи:

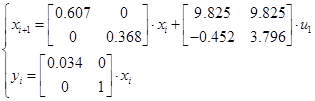
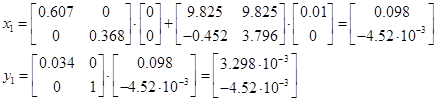
1.6 Модель в дискретному часі
система в дискретному часі має вид:
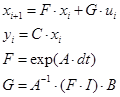
dt=14,89 c.
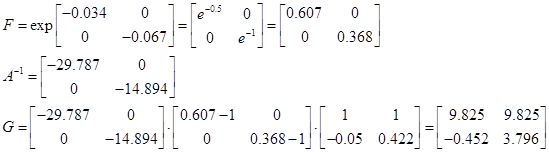
Таким чином

Задавшись  , ,  , тоді , тоді
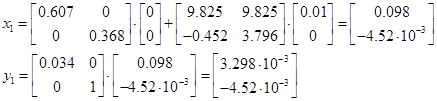
Результати подальших ітерацій представлено в таблиці:
Таблиця 3.
| Збурення |
Реакція виходу системи y (t) |
u1=0
u2=0,01
|
y1
y2
|
0
0
|
0,003298
0,00452
|
0,005299
0,00469
|
0,00773
0,006183
|
0,006512
0,006795
|
0,00725
0,00702
|
0,00769
0,00713
|
| час t, с |
0 |
14,894 |
29,787 |
44,681 |
59,574 |
74,468 |
89,362 |
1.7 Перетворення моделі у форму Ассео





   
1.8 Обчислення МПФ системи
 ; ;  ; ;  ; n=2; i=1; ; n=2; i=1; 

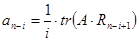


Таким чином




1.9 Структурні схеми системи в початковій формі, формі Ассео, ЗЗП
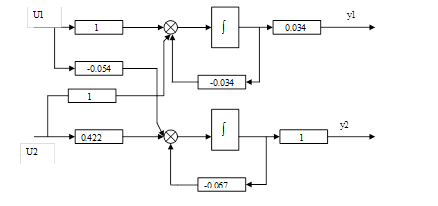
Рисунок 2. Структурна схема системи в початковій формі.
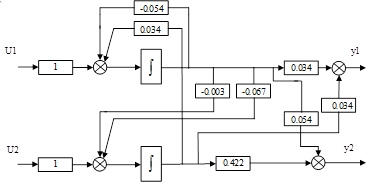
Рисунок 3. Структурна схема системи в формі Ассео.

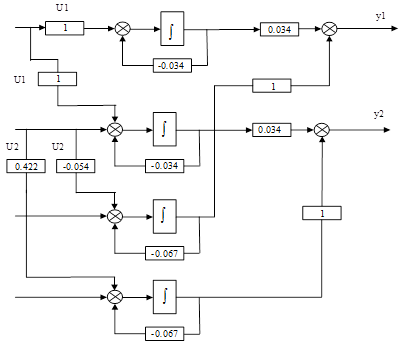
Рисунок 4. Структурна схема системи у зовнішньозв'язанному поданні.
1.10 Лінеаризована модель в непереривному і дискретному часі з датчиками і ВМ
a) в непереривному часі
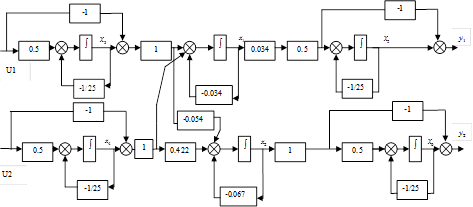
Рисунок 5. Структурна схема системи в неперервному часі з датчиками і ВМ.

б) в дискретному часі

Рисунок 6. Структурна схема системи в дискретному часі з датчиками і ВМ.

1.11 Умова правомірності децентралізації
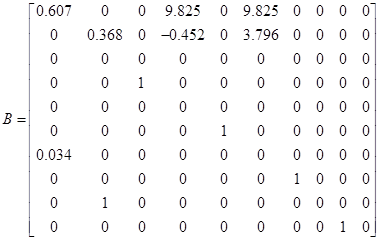
Система в формі Ассео:
 
 , ,  ,, ,,



Спектральна норма матриці  , тобто максимальне сингулярне число матриці: , тобто максимальне сингулярне число матриці:
 , ,  . .
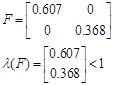
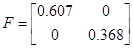
Спектральна норма матриці F:
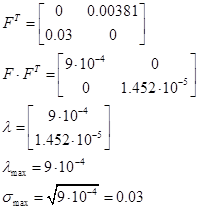
Тоді:


Похибка складає:

Можна допустити, що децентралізація є допустимою.
2. Аналіз якісних властивостей системи
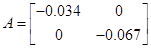
А) 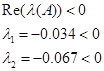
Матриця являється гурвіцевою.
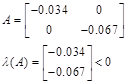
Б) 
max s1 (A) =||A||2=0.067<1
Відповідно, матриця А є нільпотентною.
Перевірити, чи є система (А, В, С) сталою, керованою, спостережною, ідентифікованою з вектором-стовпцем х = (1; 1.25), параметрично інваріантною, мінімально фазовою, розчеплюваною, мінімально.
А) сталість:
Відповідно система являється сталою.
Відповідно система являється сталою.
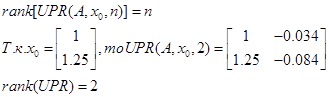
Б) керованість:

; 
По першому входу:


Система керована по першому входу.
По другому входу:


Система керована по другому входу.
В) спостережність:
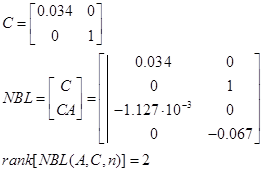
Система спостережна.
Г) ідентифікованість:
Система є ідентифікована.
Д) параметрична інваріантність:

Система не інваріантна відносно відхилення dA.

Система не інваріантна відносно відхилення dB.

Система не інваріантна відносно відхилення dС.
Е) мінімальнофазовість і астатичність:

 система являється мінімально фазовою і статичною. система являється мінімально фазовою і статичною.
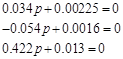
Ж) розчеплюваність:



 det=0.016 det=0.016
Система є розчеплюваною.
3. Дослідження процесів в системі і аналіз кількісних властивостей системи
3.1 Побудова графіків розгінних кривих непереривної системи
Побудова графіку розв'язання у (t) для системыи {А, В, С}, якщо
 и и 
Таблиця 4.
| Збурення |
Реакція виходу системи y (t) |
u1=0,01
u2=0
|
y1
y2
|
0
0
|
0,00435
0,00445
|
0,00681
0,00609
|
0,00820
0,0067
|
0,00898
0,00692
|
0,00942
0,00700
|
0,00967
0,00703
|
u1=0
u2=0,01
|
y1
y2
|
0
0
|
0,00435
0,037
|
0,00681
0,051
|
0,00820
0,056
|
0,00898
0,058
|
0,00942
0,059
|
0,00967
0,059
|
| час t, с |
0 |
14,3 |
28,6 |
42,9 |
57,2 |
71,5 |
85,8 |
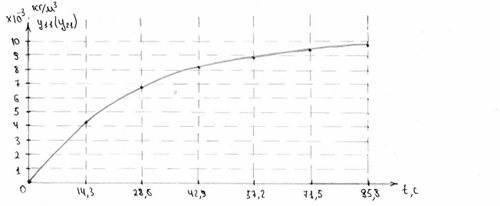
Рисунок 7. Розгінна крива витрати рідини для неперервної системи при збуренні 0 і 0,01.
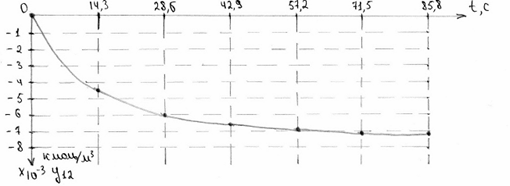
Рисунок 8. Розгінна крива концентрації для неперервної системи при збуренні 0.
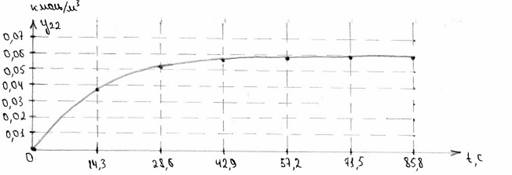
Рисунок 9. Розгінна крива концентрації для неперервної системи при збуренні 0,01.
3.2 Побудова графіків кривих разгону дискретної системи
Система в дискретному часі має вид:

dt=14,89 c.

Таким чином
Задавшись  , ,  , тоді , тоді
Результати подальших ітерацій представлено в таблиці:
Таблиця 5.
| Збурення |
Реакція виходу системи y (t) |
u1=0
u2=0,01
|
y1
y2
|
0
0
|
0,003298
0,00452
|
0,005299
0,00469
|
0,00773
0,006183
|
0,006512
0,006795
|
0,00725
0,00702
|
0,00769
0,00713
|
| час t, с |
0 |
14,894 |
29,787 |
44,681 |
59,574 |
74,468 |
89,362 |
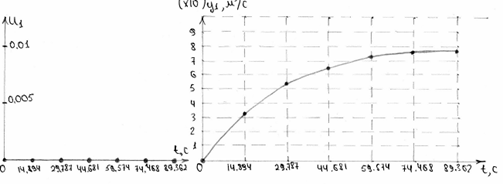
Рисунок 10. Характеристика витрати рідини в дискретному часі.

Рисунок 11. Характеристика концентрації в дискретному часі.
3.3 Побудова графіків кривих разгону нелінійної системи
Розглянемо поповнення бака від 0 до номінального значення витрати з урахуванням приросту поданого лінеаризованій моделі. Таким чином, розглянемо стрибок u1
=0,03; u2
=0.
Позначивши  ,рівняння бака запишемо у вигляді системи: ,рівняння бака запишемо у вигляді системи:
Перше рівняння є нелінійним зі змінними що розділяються

З урахуванням того, що  запишемо: запишемо:
 , чи підставляючи , чи підставляючи

Виразимо 
Підставляємо  та та 
Таблиця 6.
| y1 |
0.141 |
0.142 |
0.143 |
0.144 |
0.145 |
0.146 |
0.147 |
0.148 |
0.149 |
0.150 |
0.151 |
| t, с |
0 |
1.5 |
3.188 |
5.116 |
7.357 |
10.026 |
13.315 |
17.585 |
23.643 |
34.072 |
68.958 |
По отриманим даним побудуємо графік:

Рисунок 12. Лінійна та нелінійна характеристика витрати води.
Так як немає аналітичної залежності  , використаємо її кус очно-лінійну апроксимацію, представляючи на проміжкові від , використаємо її кус очно-лінійну апроксимацію, представляючи на проміжкові від  до до  функцію как функцію как  . Тоді, . Тоді,
 ; ; 

Отримані дані занесемо в таблицю:
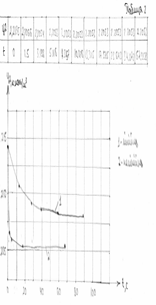
Рисунок 13. Лінійна та нелінійна характеристика концентрації.
3.4 Сталий стан системи
Вичислимо постійне значення системи при умовах

І порівняємо його з результатом розрахунку.


4. Ідентифікація багатомірної математичної моделі по даним експеремента
4.1 Активна ідентифікація
Для дискретної форми системи (F, G, C) провести реалізацію системи.
Запишемо систему у вигляді:

Подавши імпульс по першому входу, розрахуємо:
  
 
  
 
Із власних векторів від ( ) і ( ) і ( ) побудуємо: ) побудуємо:
  



При 
Знайдемо передаточну функцію системи:
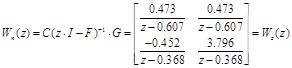 . .
4.2 Пасивна ідентифікація
Для дискретної форми системи (F, G, C) провести пасивну ідентифікацію системи:
Таблиця 7.
| Такт, n |
0 |
1 |
2 |
3 |
4 |
5 |
| U (n) |
0.01 |
0 |
0 |
0.04 |
0 |
0 |
| 0 |
0.01 |
0.02 |
0 |
0.03 |
0 |
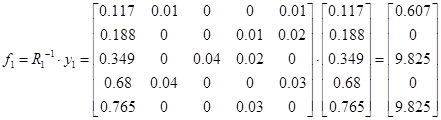
Використовуючи матриці системи в дискретній формі для заданих значень вектора входу, розрахуємо значення вектора виходу
Результати розрахунку занесемо до таблиці:
Таблиця 8.
| Такт, n |
1 |
2 |
3 |
4 |
5 |
6 |
| y (n) |
0.117 |
0.188 |
0,349 |
0.68 |
0.765 |
0.464 |
| -0.00509 |
0.03787 |
0.09342 |
0.01402 |
0.12438 |
0.04577 |
Тогда
Следовательно,
5. Конструювання багатомірних регуляторів, оптимізуючи динамічні властивості агрегату
5.1 Конструювання П-регулятора, оптимізую чого систему по інтегральному квадратичному критерію
Регулятор стану який оптимізує систему по критерію:

Визначається по співвідношенню: P=LR1 (A,B,Q,R);


Притом Q=R=I
Так як матриця С є інвертованою, для створення регулятора виходу немає
Необхідно конструювати спостерігач стану -недосяжний стан вичислюється по формулі  . Відповідно регулятор виходу має вид . Відповідно регулятор виходу має вид 
Позначивши через z задане значення виходу у і припускаючи, що  , отримаємо , отримаємо


5.2 Конструювання компенсаторів завдань і вимірюваних збурень
Прийнявши до уваги, що А=В
Якщо при компенсації збурень і завдань зчитувати "вартість" управління, записавши критерій в виді
 , ,
то компенсатори визначаються залежностями

Значення виходу при дії збурення f в системі без компенсаторів при z=0

З оптимальною компенсацією
 f f

5.3 Конструювання регулятора з компенсатором взаємозв'язків




Следовательно,

Перевіримо чи регулятор дійсно розчіплює систему, тобто матриця передаточних функцій являється діагональною
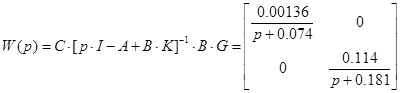

 , ,  , де , де  , ,  . .
Знайдемо
1.  
2.   . .
5.4 Конструювання аперіодичного
Аперіодичний регулятор для дискретної системи може бути отриманий із умови  . Запишем . Запишем 
5.5 Конструювання децентралізованого регулятора
Використовуючи форму Ассео, запишем:
 
Відповідно, отримаємо 
 , , 
Розв'яжим рівняння Ляпунова.
 T=B T=B

5.6 Конструювання надійного регулятора
Якщо матриця G моделяє відмови каналів вимірювання, то регулятор знаходиться в виді 

нехай s=0.041


Відповідно, система являеться постійною при любих відхиленнях.
5.7 Конструювання блочно-ієрархічного регулятора
Використаємо регулятор стану і перевіримо чи можна створити послідовність регуляторів стану.
 ; ;  ; ;  ; ;  ; ; 







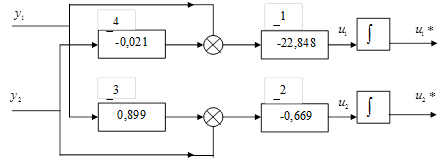
Рисунок 14. Схема блочно-ієрархічного регулятора.
5.8 Конструювання регулятора для білінійної моделі






5.9 Конструювання регулятора для нелінійної системи
Сконструювати нелінійний регулятор, використовуючи початкову не спрощену модель бака.
 , , 
Розрахункове співвідношення для регулятора -  , де , де 
При s=4, W=1 запишемо
Підставивши  запишемо запишемо
5.10 Конструювання програмного регулятора
Використовуючи лінеаризовану модель в дискретному часі, запишемо програму переходу системи із стану  в стан в стан
 . .

При ; 
Отримаємо

6. Аналіз властивостей зконструйованої системи з оптимальним П-регулятором
6.1 Побудова процесу в системі з П-регулятором
Стале значення виходу при дії збурення f у системі без компенсаторів при z=0

З оптимальною компенсацією
 f f

Рисунок 15. Графіки перехідних процесів та кривих розгону по першому та другому виходах з оптимальним П-регулятором з компенсатором і без.
6.2 Обчислення критерію оптимальності в системі
Величина критерію оптимальності обчислюється за залежністю . Для обчислення величини критерію з довільним регулятором слід використовувати формулу . Для обчислення величини критерію з довільним регулятором слід використовувати формулу
 , де , де  . .
розв'язавши рівняння Ляпунова отримаємо


розв'язавши рівняння Ляпунова отримаємо


При 10% та 5%
 , ,
 , ,
 , , 
Розв'яжемо  для всіх матриць при нових значеннях для всіх матриць при нових значеннях
 , , 
 , ,  , ,  , , 
При 10% та 5%
 , , 
 , ,
 , ,  . .
6.3 Обчислити чуйність системи







6.4 Проаналізувати робастність системи

6.5 Розв'язати зворотну задачу конструювання
Знайти за яким критерієм є оптимальний регулятор з компенсаторів взаємозв'язків.


де W - довільна матриця яка задовольняє умові S>0

розв'язавши отримаємо


Висновок
Таким чином, в ході виконання курсової роботи на прикладі моделі змішувального бака була розгляне на технологічна послідовність конструювання систем: побудова та перетворення моделей системи, аналіз властивостей початкової системи, конструювання регуляторів, аналіз властивостей і порівняння сконструйованих систем. Також при виконанні були отримані ряд кривих розгону та перехідних процесів для моделі бака, були побудовані структурні схеми моделі в початковій формі, Ассео, зовнішньо зв’язаній формі. Отримали навики конструювання систем з використанням регулятора з компенсатором взаємозв”язків, аперіодичного, децентралізованого, надійного, блочно-ієерархічного регуляторів, програмного регулятора, регулятора для нелінійної моделі, регулятора для білінійної моделі.
Література
1. Методические указания к практическим занятиям по курсу "Основы системного анализа и теория систем", А.А. Стопакевич
2. "Сложные системы: анализ, синтез, управление", А.А. Стопакевич
Додаток
Розв'язання рівняння Рікарті
Розв'язання рівняння Рікарті  визначення матриці Р. визначення матриці Р.
Сформуємо матрицю
Для обчислення власних значень розкриємо визначник 

 . .
Розв'язання рівняння Ляпунова 


  . .
Обчислення матричної експоненти


 , ,
  . .
Фробеніусові матриці


Вандермордова матриця

|