| Зміст
ВСТУП
1.АВТОМАТИЧНИХ СИСТЕМ КЕРУВАННЯ НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ. ЗАГАЛЬНІ ПОЛОЖЕННЯ
2. ОСНОВНІ ПОЛОЖЕННЯ ЩОДО РОЗРОБКИ АВТОМАТИЧНИХ СИСТЕМ КЕРУВАННЯ НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ
2.1 Перший етап проектування - побудова математичних моделей об'єктів керування
2.2 Другий етап проектування – вибір пристроїв незмінної та змінної частин системи
2.3 Третій етап проектування – вирішення задачі аналізу чи синтезу
2.4 Задачі синтезу
3.РОЗРОБКА АСК НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ. Автоматизування змішувальної установки на основі одноконтурних систем регулювання
3.1 Принцип роботи змішувальної установки
3.2 Розрахунок невідомих значень технологічних параметрів
3.3 Аналіз технологічного процесу змішування як об'єкта керування
3.4 Побудова функціональної схеми автоматизації змішувальної установки
3.5 Синтез автоматичної системи регулювання
3.5.1 Розробка структурної схеми АСР і математичних моделей
3.5.2 Основи методу квадратур
3.5.3 Розрахунок оптимальних настроювань регулятора
3.5.4 Розрахунок частотних характеристик АСР
3.5.5 Розрахунок перехідного процесу системи регулювання
ВИСНОВОК
ЛІТЕРАТУРА
Вступ
Тема курсової роботи «Автоматизування змішувальної установки на основі одноконтурних систем регулювання».
Мета курсової роботи – навчитися та набути навики з розробки та проектування систем автоматизації неперервними технологічними процесами.
У хімічній технології автоматизованому управлінню технологічними процесами приділяється особлива увага. Це пояснюється складністю і високою швидкістю протікання хімічних реакцій, а також чутливістю технологічних процесів до порушення режимних параметрів, шкідливістю умов роботи, пожежо- і вибухонебезпечністю перероблюваних речовин тощо.
Автоматизація виробництва приводить до покращення основних показників ефективності: підвищення якості та зменшення собівартості вироблюваної продукції. Впровадження автоматизованих систем управління технологічними процесами приводить до того, що на оператора покладається тільки спостерігаюча роль – виконує аналіз результатів управління, розробляє завдання та програми для автоматизованих систем, проводить налагоджування складних автоматичних пристроїв тощо.
1.АВТОМАТИЧНИХ СИСТЕМ КЕРУВАННЯ НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ. ЗАГАЛЬНІ ПОЛОЖЕННЯ
Автоматизація передбачає регулювання, контроль, сигналізацію та блокування технологічних параметрів за допомогою відповідних автоматичних пристроїв. Прикладом системи є будь-який регульований технологічний процес, який підлягає керуванню. На рис. 1 показані принципи автоматизації теплообмінника змішування. Протікання процесу контролюється датчиками  . Вироблювані сигнали датчиків . Вироблювані сигнали датчиків  та та  , котрі пропорційні регульованим вихідним координатам , котрі пропорційні регульованим вихідним координатам  та та  , за допомогою вимірювальних перетворювачів , за допомогою вимірювальних перетворювачів   і і  перетворюються на відповідні уніфіковані сигнали і надходять на регулятори перетворюються на відповідні уніфіковані сигнали і надходять на регулятори  та та  , на які одночасно подаються керуючі сигнали , на які одночасно подаються керуючі сигнали  та та  . Останні формують відповідний алгоритм регулювання та видають сигнали . Останні формують відповідний алгоритм регулювання та видають сигнали  та та  на виконавчі механізми ВМ1 та ВМ2, котрі встановлені на відповідних лініях матеріальних потоків х1 та х3 (вхідні координати системи). На систему діють збурення на виконавчі механізми ВМ1 та ВМ2, котрі встановлені на відповідних лініях матеріальних потоків х1 та х3 (вхідні координати системи). На систему діють збурення  . Причому . Причому  – температура матеріального потоку – температура матеріального потоку  ; ;  – витрата потоку – витрата потоку  з температурою з температурою  . .
Автоматичному контролю підлягають наступні технологічні параметри: температура на виході теплообмінника (вимірюється датчиком Д1), рівень рідини в апараті (вимірюється датчиком Д2), витрати матеріальних потоків (вимірюються датчиками Д3 і Д4), а також температури цих потоків (вимірюються датчиками Д5 і Д6).
Сигналізації (лампи Л1…Л4) підлягають витрати матеріальних потоків (за їх мінімумом і максимумом), температура потоку на виході (за максимумом) і рівень рідини в апараті (за максимумом і мінімумом).
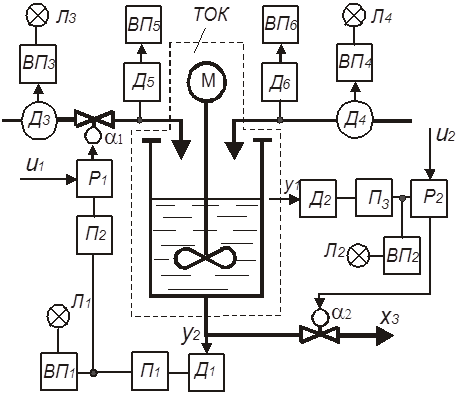
Рис. 1. Схема керування технологічним процесом.
Для проведення технологічного процесу необхідно мати інформацію як про вхідні, так і вихідні параметри. Вимірювальну інформацію одержують з допомогою відповідних перетворювачів, котрі реалізують той чи інший метод вимірювання.
Перед кожним об’єктом вимірювання ставиться відповідна вимірювальна задача, яка полягає у визначенні значення фізичної величини з необхідною точністю в даних умовах вимірювань. Для розв’язання такої задачі необхідна вимірювальна система, яка включає первинні вимірювальні й проміжні перетворювачі, а також засоби відображення інформації (вторинні прилади, дисплеї, принтери тощо).
Розробка АСК неперервними технологічними процесами починається з вивчення фізичних або фізико-хімічних процесів об′єкта керування. На основі аналізу технологічного процесу як об′єкта керування розробляються математичні моделі технологічного процесу, структурні схеми автоматичних систем регулювання (АСР), які мають враховувати принцип регулювання, вимоги до точності та надійності, а також комплексу технічних засобів: датчиків, нормуючих і проміжних перетворювачів, підсилювачів, регуляторів, виконавчих механізмів, регулюючих органів тощо.
Задачі синтезу АСK, як правило, зводяться до вибору типу та параметрів регуляторів, компенсаторів і коректуючих пристроїв, здатних найточніше відтворювати регулярні сигнали керування.
2. ОСНОВНІ ПОЛОЖЕННЯ ЩОДО РОЗРОБКИ АВТОМАТИЧНИХ СИСТЕМ КЕРУВАННЯ НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ
Сучасні АСК представляють собою складні динамічні системи, які забезпечують високу точність управління в умовах дії різноманітних збурень і перешкод. При великих величинах збурень і рівнів перешкод порушуються нормальні експлуатаційні режими, зменшується точність і погіршуються показники якості перехідних процесів в системах по відношенню до заданих технічними умовами. Проектування таких АСК представляє собою достатньо складну проблему, так як до них входять пристрої та об'єкти керування різної фізичної природи.
Для одержання необхідних характеристик АСК проектувальнику приходиться знаходити компромісні рішення, так як вимоги до точності та показників якості перехідних процесів взаємовиключаючі. Основний шлях подолання такого протиріччя – використання в АСК елементів з великими коефіцієнтами підсилення та корегуючих пристроїв з переналагоджувальними під час роботи параметрами. Але з ростом коефіцієнтів підсилення зростає вплив нелінійностей в елементах, що призводить до порушення принципу суперпозиції та необхідності врахування при проектуванні керуючих і збурюючих дій. З їх зміною в системах появляються поперемінно режими стійкого, нестійкого руху та автоколивання.
Переналагоджування параметрів корегуючих пристроїв може проводитися неперервно або стрибкоподібно. У результаті порушується стаціонарність процесів в елементах, динаміка яких у цих випадках описується диференціальними, інтегральними або різницевими рівняннями зі змінними параметрами. При проектуванні АСК досить часто необхідно мати амплітудно-фазові частотні характеристики, за якими знаходять запаси стійкості всієї АСК. Користуючись такими характеристиками, можна оцінити вплив зміни параметрів елементів системи та об'єктів на її стійкість у замкненому стані. Методи дослідження систем у частотній області дозволяє знаходити показники якості та характеристики точності.
Стійкість є необхідною, але не достатньою умовою нормального функціювання АСК. Наявність стійкості свідчить лише про те, що перехідний процес, який викликаний дією зовнішнього впливу або існуючими ненульовими початковими умовами, є загасаючим. Але при цьому не визначаються ні час загасання, ні максимальне відхилення регулюючої величини, ні кількість коливань. А якраз ці показники характеризують якість протікання процесів регулювання.
Незалежно від способу виконання робіт – традиційним ручним методом чи автоматизованим шляхом з використанням обчислювальної техніки – весь процес проектування ділиться на декілька характерних етапів.
2.1 Перший етап проектування - побудова математичних моделей об'єктів керування
Знаючи фізичні процеси, які протікають в об'єкті, можна при деяких припущеннях описати його поведінку аналітично, звичайно з допомогою диференціальних, інтегро-диференціальних чи різницевих рівнянь. Як правило, побудова детермінованих математичних моделей об'єктів керування базується на рівняннях їх теплових і матеріальних балансів, а стохастичних – на експериментальних результатах досліджень. При цьому проектувальник знає номінальні значення вхідних і вихідних координат, діапазони їх зміни, вимоги до них технологічного регламенту, за якими можна розрахувати коефіцієнти математичних моделей. На основі математичних моделей проектувальник може скласти структурну схему об'єкта керування з допомогою матриць, передавальних функцій або графів. Одержані моделі є математичною формалізацією процесів у реальних об'єктах, при чому один і той же об'єкт у залежності від прийнятих припущень може бути описаний у різній формі.
2.2 Другий етап проектування – вибір пристроїв незмінної та змінної частин системи
До незмінної частини прийнято відносити виконавчі механізми і регулюючі органи, підсилювачі потужності, проміжні перетворювачі та вимірювальні засоби. Їх вибирають не тільки з урахуванням вимог до точності та якості регулювання, але, в основному, за надійністю дії, вартістю, стійкістю до впливу агресивного середовища, вибухобезпечності тощо. До змінної частини системи відносять регулятори, мікропроцесорні пристрої, компенсатори, а також пристрої корекції динамічних характеристик.
На другому етапі проектувальник складає математичні моделі пристроїв керування, які входять до незмінної частини системи. Це забезпечує основу для побудови структури всієї АСК. Якщо повністю ви
значена структура АСК, то подальше проектування зводиться до вирішення задачі аналізу, в іншому випадку – до вирішення задачі синтезу.
2.3 Третій етап проектування – вирішення задачі аналізу чи синтезу
Якщо ставиться задача аналізу АСК, то при цьому процес проектування зводиться до розрахунково-теоретичної роботи. Проектувальник повинен знайти математичні моделі замкнених і розімкнених систем регулювання. При цьому широко використовуються методи структурних перетворень, котрі дозволяють багатоконтурні системи представити у вигляді одноконтурних.
Прийнятий порядок аналізу АСК полягає в послідовному виконанні наступних дій: визначення еквівалентних передавальних функцій об'єкта керування, дослідження стійкості, якості й точності регулювання. Досліджувати якість неперервних і дискретних лінійних систем можно, аналізуючи розташування нулів і полюсів передавальної функції замкненої системи, а також за кореневим годографом, інтегральними оцінками, дійсної та уявної частотних характеристик замкненої системи або за кривими перехідних процесів.
Проблема підвищення динамічної точності є основною, так як без її вирішення неможливо забезпечити виконання покладених на систему задач (системи стабілізації не зможуть підтримувати режими регулювання з заданою точністю, системи програмного керування можуть вивести об'єкт на недопустимі робочі режими тощо).
На характеристики точності значний вплив чинять не тільки сигнали керування та збурення, але й перешкоди, які поступають ззовні або які створюються всередині системи. Тому при аналізі АСК враховують два типи похибок: регулярні та випадкові. Для зменшення регулярних похибок необхідно збільшувати коефіцієнти підсилення пристроїв керування. Але при цьому слід пам'ятати, що одночасно збільшується небажаний вплив нелінійностей на поведінку системи. З ростом коефіцієнта підсилення збільшується смуга пропускання системи, що приводить до зростання похибки від дії шумів.
Шляхом підбору додаткових корегуючих пристроїв можна підвищити порядок астатизму системи регулювання. Але підвищувати астатизм системи вище 3-го порядку недоцільно, так як це приводить до значного збільшення впливу перешкод на точність системи.
2.4 Задачі синтезу
Задачі синтезу АСК зводяться до вибору типу та параметрів послідовних, паралельних і послідовно-паралельних корегуючих пристроїв, які забезпечують найбільш точне відтворення регулярних сигналів керування. Розрізняють структурний і параметричний синтез АСК. Постановка задачі структурного синтезу зводиться до того, що необхідно визначити тип корегуючого пристрою, який забезпечує мінімальну середньоквадратичну похибку перешкоди при заданій динамічній похибці й часу протікання перехідного процесу. У результаті вирішення задачі синтезу в обох випадках у систему вводяться лінійні корегуючі пристрої. Вони реалізуються у вигляді RC-фільтрів або робочих програм для мікропроцесорних контролерів. Постановка задачі параметричного синтезу зводиться до того, що необхідно визначити параметри регуляторів і корегуючих пристроїв, які забезпечують задані показники якості системи регулювання.
Якщо результати моделювання АСК відповідають технічним умовам, то на цьому процес проектування закінчується і розробляється ескізний проект системи регулювання.
3.РОЗРОБКА АСК НЕПЕРЕРВНИМИ ТЕХНОЛОГІЧНИМИ ПРОЦЕСАМИ
Автоматизування змішувальної установки на основі одноконтурних систем регулювання
3.1 Принцип роботи змішувальної установки
Змішувальна установка (рис. 2) призначена для неперервного змішування двох електропровідних рідин з різними концентраціями (процес запуску змішувальної установки не розглядається).
Принцип роботи змішувальної установки полягає в наступному. При постійному перемішуванні рідини в установку через регулюючі клапани 1 і 2 постійно завантажуються дві рідини з витратами:  (концентрація (концентрація  , густина , густина  ) і ) і  (концентрація (концентрація  , густина , густина  ), а через регулюючий клапан 3 рідина виводиться з устаноки. Рівень рідини в установці повинен дорівнювати ), а через регулюючий клапан 3 рідина виводиться з устаноки. Рівень рідини в установці повинен дорівнювати  . Для проводення процесу в автоматичному режимі неохідно стабілізувати рівень рідини в установці та її концентрацію, а також вести автоматичний контроль за наступними технологічними параметрами: витратами потоків . Для проводення процесу в автоматичному режимі неохідно стабілізувати рівень рідини в установці та її концентрацію, а також вести автоматичний контроль за наступними технологічними параметрами: витратами потоків  і і  , рівнем рідини , рівнем рідини  та концентрацією та концентрацією  цільового компоненту на виході з установки. Приймаємо, що процес перемішування відноситься до процесу ідеального перемішування. Зміною температури в установці знехтуємо. Блокування виконується за перевищенням рівня цільового компоненту на виході з установки. Приймаємо, що процес перемішування відноситься до процесу ідеального перемішування. Зміною температури в установці знехтуємо. Блокування виконується за перевищенням рівня  в установці шляхом перекриття потоків в установці шляхом перекриття потоків  і і  . .
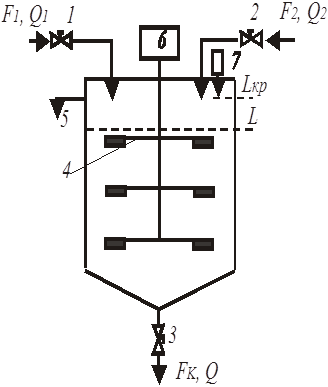
Рис. 2. Схема змішувальної установки.
На рис. 2 показано: 1,2, 3 – клапани; 4 – перемішувач; 5 – переливний патрубок; 6 – привід перемішувача; 7 – датчик аварійної зупинки установки.
3.2 Розрахунок невідомих значень технологічних параметрів
Розраховуємо масові витрати матеріальних потоків:
 ; ;
 ; ;
 . .
Розрахуємо номінальне значення концентрації на виході з установки за формулою:
 . .
3.3 Аналіз технологічного процесу змішування як об'єкта керування
Для нормальної роботи змішувальної установки в неперервному режимі роботи необхідно стабілізувати два технологічних параметри: рівень  рідини в установці та концентрацію рідини в установці та концентрацію  на її виході. на її виході.
Рівень в установці доцільно стабілізувати за рахунок зміни витрати  рідини на її виході. Для стабілізації концентрації на виході установки використаємо витрату рідини на її виході. Для стабілізації концентрації на виході установки використаємо витрату  , враховуючи, що концентрація , враховуючи, що концентрація  . Збурюючими технологічними параметрами будуть: витрата матеріального потоку і концентрації . Збурюючими технологічними параметрами будуть: витрата матеріального потоку і концентрації  та та  . Так як витрата є змінною координатою, яка не використовується для регулювання, то її необхідно стабілізувати. Структурно-логічна схема змішувальної установки показана на рис. 3. . Так як витрата є змінною координатою, яка не використовується для регулювання, то її необхідно стабілізувати. Структурно-логічна схема змішувальної установки показана на рис. 3.

Рис. 3. Структурно-логічна схема змішувальної установки.
3.4 Побудова функціональної схеми автоматизації змішувальної установки
Для нормальної роботи установки достатньо трьох автоматичних систем регулювання:
- АСР стабілізації рівня рідини в установці;
- АСР стабілізації концентрації на виході установки;
- АСР стабілізації витрати .
Для вимірювання рівня рідини в установці використаємо тензометричний рівномір типу “Сапфір-22 ДГ, який має вихідний електричний сигнал 4 ... 20 мА. Так як технологічний процес перемішування не відноситься до пожежо-вибухонебезпечних, то використаємо електричну систему приладів. Згідно з технологічним регламентом статична похибка регулювання не допускається. Тому для регулювання використаємо електронний регулятор з ПІ-законом регулювання. Вихідний сигнал рівноміра поступає на підсилювач напруги, підсилювач потужності і далі на виконавчий механізм, яким служить реверсивний двигун постійного струму. Вал останнього жорстко зв'язаний з регулюючим органом, яким служить односідловий клапан.
Для вимірювання концентрації речовини на виході установки використаємо кондуктометричний аналізатор з вихідним електричним сигналом 0 ... 20 мВ. Згідно з технологічним регламентом статична похибка регулювання не допускається. Тому для регулювання використаємо електронний регулятор з ПІ-законом регулювання. Вихідний сигнал аналізатора поступає на підсилювач напруги, підсилювач потужності і далі на виконавчий механізм, яким служить реверсивний двигун постійного струму. Вал останнього жорстко зв'язаний з регулюючим органом, яким служить односідловий клапан.
Так як витрата  невелика, а рідина електропровідна, то для її вимірювання використаємо індукційний витратомір з вихідним сигналом 0 ... 1 В. Згідно з технологічним регламентом статична похибка регулювання не допускається. Тому для регулювання використаємо електронний регулятор з ПІД-законом регулювання, так як трубопровід має достатньо великий час чистого запізнення.. Вихідний сигнал витратоміра поступає на підсилювач напруги підсилювач потужності і далі на виконавчий механізм, яким служить реверсивний двигун постійного струму. Вал останнього жорстко зв'язаний з регулюючим органом, яким служить односідловий клапан. невелика, а рідина електропровідна, то для її вимірювання використаємо індукційний витратомір з вихідним сигналом 0 ... 1 В. Згідно з технологічним регламентом статична похибка регулювання не допускається. Тому для регулювання використаємо електронний регулятор з ПІД-законом регулювання, так як трубопровід має достатньо великий час чистого запізнення.. Вихідний сигнал витратоміра поступає на підсилювач напруги підсилювач потужності і далі на виконавчий механізм, яким служить реверсивний двигун постійного струму. Вал останнього жорстко зв'язаний з регулюючим органом, яким служить односідловий клапан.
Для забезпечення нормальної роботи установки необхідно побудувати такі інформаційно-вимірювальні системи (ІВС): - витрати потоків  і і  ; - концентрації ; - концентрації  і ; - рівня і ; - рівня  рідини в установці. рідини в установці.
Для побудови ІВС витратами використаємо індукційні витратоміри з вихідним сигналом 0 ... 1 В. Вторинними приладами служитимуть автоматичні потенціометри типу КСП-4.
Для побудови ІВС концентраціями використаємо кондуктометричні аналізатори з вихідним сигналом 0 ... 20 мВ. Вторинними приладами служитимуть автоматичні потенціометри типу КСП-4.
Для побудови ІВС рівня використаємо тензометричний датчик “Сапфір 22-ДГ” з вихідним сигналом 4 ... 20 мА. Вторинним приладом служитиме автоматичний міліамперметр типу А 541.
Сигналізація здійснюється за такими технологічними параметрами: рівнем в установці (мінімум і максимум - лампи Л3 і Л4); витратами і  (мінімум - лампи Л1 і Л2) і концентрація (лампа Л5). (мінімум - лампи Л1 і Л2) і концентрація (лампа Л5).
Блокування здійснюється при аварійному перевищенні рівня в установці до значення  . У цьому випадку датчик 7 видає сигнал, який приводить до закриття клапанів КВ. Функціональна схема автоматизації змішувальної установки приведена на рис. 4. . У цьому випадку датчик 7 видає сигнал, який приводить до закриття клапанів КВ. Функціональна схема автоматизації змішувальної установки приведена на рис. 4.
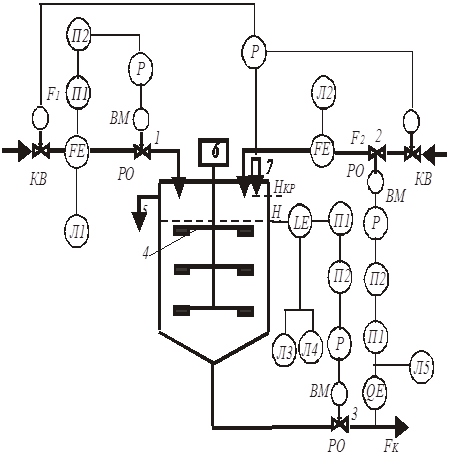
Рис. 4. Функціональна схема автоматизації змішувальної установки
3.5 Синтез автоматичної системи регулювання
3.5.1Розробка структурної схеми АСР і математичних моделей
Згідно зі завданням потрібно виконати параметричний синтез АСР рівня рідини в установці. Структурна схема одноконтурної системи стабілізації рівня рідини показана на рис. 5.

Рис. 5. Структурна схема АСР стабілізації рівня рідини.
Порядок синтезу АСР буде наступним.
1.Розробимо або виберемо передавальні функції всіх динамічних ланок АСР. Так як згідно з умовою для стабілізації рівня необхідно використати ПІ-регулятор, то його передавальна функція має вигляд  , де , де  і і  - коефіцієнт підсилення та час інтегрування регулятора - є настроювальними параметрами. - коефіцієнт підсилення та час інтегрування регулятора - є настроювальними параметрами.
Виконавчий механізм представляє собою електродвигун постійного струму. З деяким наближенням передавальну функцію для двигуна запишемо у вигляді  , де , де  - коефіцієнт передачі виконавчого механізму, - коефіцієнт передачі виконавчого механізму,  - постійна часу. - постійна часу.
Регулюючий орган, підсилювачі напруги та потужності рахуватимемо як підсилювальні динамічні ланки, для яких передавальні функції приймаємо наступними:
 , ,  і і  . .
Згідно зі завданням технологічний об'єкт керування (ТОК) описується наступною передавальною функцією:
 , ,
де  - коефіцієнт передачі, постійні часу та час чистого запізнення об'єкта відповідно. - коефіцієнт передачі, постійні часу та час чистого запізнення об'єкта відповідно.
Рівень в установці вимірюється тензометричним датчиком, який можна представити підсилювальною динамічною ланкою. Тому передавальна функція датчика рівня  (передавальні функції для інших датчиків вимірювання технологічних параметрів вибираються з методичних вказівок до виконання курсової роботи з дисципліни “Технологічні вимірювання та прилади”). (передавальні функції для інших датчиків вимірювання технологічних параметрів вибираються з методичних вказівок до виконання курсової роботи з дисципліни “Технологічні вимірювання та прилади”).
2.Знаходимо еквівалентну передавальну функцію замкненої системи регулювання по каналу завдання:
 . .
3.Знаходимо передавальну функцію еквівалентного об'єкта керування
 . .
Підставивши в останнє рівняння вищеназвані передавальні функції, маємо
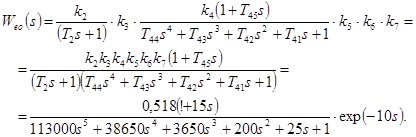
З рівняння видно, що еквівалентний об'єкт керування описується диференціальним рівнянням пятого порядку. Останнє рівняння запишемо в такій формі:

де
 ; ;
 - передавальна функція ланки чистого запізнення. - передавальна функція ланки чистого запізнення.
Перехідний процес для еквівалентного об'єкта керування та АСР розраховуватимемо методом квадратур.
3.5.2 Основи методу квадратур
Передавальну функцію еквівалентного об'єкта керування  ідентифікуємо до рівняння другого порядку. ідентифікуємо до рівняння другого порядку.
Уведемо заміну  , де , де  - частота і запишемо передавальну функцію таким чином: - частота і запишемо передавальну функцію таким чином:
  , ,
де  - поліноми ДЧХ; - поліноми ДЧХ;  - поліноми УЧХ. - поліноми УЧХ.
 Вираз для дійсної частотної характеристики запишемо у вигляді Вираз для дійсної частотної характеристики запишемо у вигляді
 , ,
де  - доповнюючий поліном. - доповнюючий поліном.
Відношення поліномів в останньому рівнянні можна привести до такої форми  , де , де  - відношення поліномів ДЧХ. Тоді ДЧХ приймає вигляд - відношення поліномів ДЧХ. Тоді ДЧХ приймає вигляд
 . .
Уявна частотна характеристика  , де , де  - відношення поліномів УЧХ. - відношення поліномів УЧХ.
З врахуванням вищевикладеного передавальна функція  приводиться до вигляду приводиться до вигляду  . Тепер задача полягає в тому, щоби знайти значення множників . Тепер задача полягає в тому, щоби знайти значення множників  і . Множник знаходиться при і . Множник знаходиться при  . Тоді . Тоді  . Множник знаходиться при . Множник знаходиться при  . Тоді . Тоді  , де , де  - частота переходу ДЧХ через частотну вісь. При таких умовах еквівалентна передавальна функція об'єкта керування приймає вигляд - частота переходу ДЧХ через частотну вісь. При таких умовах еквівалентна передавальна функція об'єкта керування приймає вигляд

або  , ,
де  - визначаються з функції - визначаються з функції  , а , а  - з функції - з функції  . .
Якщо позначити  , то приходимо до наступного рівняння , то приходимо до наступного рівняння

або  . .
Таким чином, передавальну функцію  можна отримати з наступного диференціального рівняння відносно вхідної величини можна отримати з наступного диференціального рівняння відносно вхідної величини
 . .
Для лінійної системи виконується принцип суперпозиції, тобто  . Тоді отримуємо аналогічне диференціальне рівняння для вихідної величини: . Тоді отримуємо аналогічне диференціальне рівняння для вихідної величини:
 . .
Характер перехідного процесу залежатиме від відношення постійних часу  . .
При  перехідний процес буде аперіодичним, який розраховується за формулою перехідний процес буде аперіодичним, який розраховується за формулою
 , ,
де  - корені характеристичного рівняння: - корені характеристичного рівняння:
 . .
При  перехідний процес буде коливальним, який розраховується за формулою перехідний процес буде коливальним, який розраховується за формулою
 , ,
де  - ступінь загасання; - ступінь загасання;  - власна частота коливань. - власна частота коливань.
Рівняння для передавальної функції еквівалентного об'єкта керування запишемо в такій формі
 ; ;
змішувальний установка система керування
Або

 , ,
де  ; ;  . .
Розрахуємо перехідний процес методом квадратур.
Знайдемо доповнюючий поліном для ДЧХ

Знайдемо відношення
Знаходимо рівняння для дійсної частотної характеристики

За останнім рівнянням розраховуємо ДЧХ і знаходимо частоту переходу  . Графік ДЧХ показаний на рис. 6. З графіка видно, що частота переходу . Графік ДЧХ показаний на рис. 6. З графіка видно, що частота переходу  . .
Підставивши частоту  в рівняння в рівняння

знаходимо постійну часу  . .
Уявна частотна характеристика має вигляд
 , ,
звідки 
або
 . .
З останнього рівняння при  отримуємо: отримуємо:  . .

Рис. 6. ДЧХ еквівалентного об'єкта керування.
Таким чином, ідентифіковане характеристичне рівняння еквівалентного об'єкта керування має вигляд:  , а диференціальне рівняння - , а диференціальне рівняння -  Знайдемо відношення постійних часу еквівалентного об'єкта керування: Знайдемо відношення постійних часу еквівалентного об'єкта керування:  . Так як відношення постійних часу менше 2, то робимо висновок, що перехідний процес еквівалентного об'єкта керування матиме коливальний характер. Тому розрахунок перехідного процесу виконаємо за формулою . Так як відношення постійних часу менше 2, то робимо висновок, що перехідний процес еквівалентного об'єкта керування матиме коливальний характер. Тому розрахунок перехідного процесу виконаємо за формулою
 . .
Знайдемо ступінь загасання перехідного процесу об'єкта:  , а власну частоту коливань за формулою , а власну частоту коливань за формулою
 . .

Рис. 7. Графік перехідного процесу еквівалентного об'єкта керування
Тоді рівняння перехідного процесу приймає вигляд
 . .
Графік перехідного процесу еквівалентного об'єкта керування показаний на рис. 7.
3.5.3 Розрахунок оптимальних настроювань регулятора
Розрахунок оптимальних настроювань регулятора виконаємо метод трикутника. Для цього використаємо криву перехідного процесу еквівалентного об'єкта керування показану на рис. 7. В області максимальної чутливості об'єкта побудуємо трикутник як показано на рис. 8 і знайдемо швидкість його руху за формулою:  . .
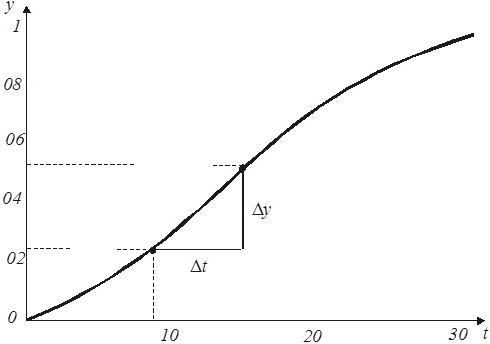
Рис. 8. Визначення оптимальних параметрів регулятораметодом трикутника
Максимальна швидкість наростання перехідного процесу  . Так як згідно зі завданням для регулювання використовується ПІ-регулятор, то оптимальні настроювання регулятора знаходимо за формулами: оптимальне значення коефіцієнта регулювання . Так як згідно зі завданням для регулювання використовується ПІ-регулятор, то оптимальні настроювання регулятора знаходимо за формулами: оптимальне значення коефіцієнта регулювання  ; час інтегрування ; час інтегрування  . .
3.5.4 Розрахунок частотних характеристик АСР
Передавальна функція еквівалентного об'єкта керування
 . .
Передавальна функція замкненої АСР має вигляд
 , ,
де  - передавальна функція регулятора. - передавальна функція регулятора.
Так як згідно зі завданням для регулювання використовується ПІ-регулятор, то з врахуванням передавальних функцій динамічних ланок маємо
 . .
Після відповідних перетворень одержуємо
 , ,
де  - коефіцієнт передачі АСР. - коефіцієнт передачі АСР.
Замінимо  , а через формулу Ейлера запишемо функцію , а через формулу Ейлера запишемо функцію  і приведемо рівняння до наступного вигляду і приведемо рівняння до наступного вигляду
 , ,
де  ; ;  ; ;  ; ;  ; ;  ; ;  ; ;
 ; ;  . .
Після відповідних перетворень отримуємо
 , ,
де  ; ;  ; ;
 ; ;
 . .
Частотні характеристики АСР дорівнюють: дійсна –
 ; уявна - ; уявна -  ; амплітудна - ; амплітудна -  . .
Розрахуємо коефіцієнти для поліномів частотних характеристик:
 ; ; ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 . .
 ; ;
 ; ;


Дійсна частотна характеристика показана на рис. 9, уявна – на рис. 10, а амплітудна – на рис. 11.

Рис. 9. Дійсна частотна характеристика АСР.

Рис.10. Уявна частотна характеристика АСР.

Рис. 11. Амплітудна частотна характеристика АСР.
3.5.5 Розрахунок перехідного процесу системи регулювання
Дійсна частотна характеристика АСР має вигляд
 , ,
де  ; ;
 ; ;


Знайдемо доповнюючий поліном
 , ,
де  . .
По ДЧХ визначаємо частоту переходу  . .
Вираз для параметра  має вигляд має вигляд

При частоті переходу  . Тобто постійна часу ідентифікованої системи регулювання . Тобто постійна часу ідентифікованої системи регулювання  . .
Для знаходження постійної часу  використаємо передавальну функцію системи регулювання без ланки чистого запізнення, яка має вигляд використаємо передавальну функцію системи регулювання без ланки чистого запізнення, яка має вигляд
 . .
З останнього рівняння уявна частотна характеристика має наступну форму
 , ,
де  ; ;  ; ;
 ; ;  . .
Тоді  . При маємо: . При маємо: . .
Ідентифіковане диференціальне рівняння, яке описує АСР, матиме вигляд
 . .
Знайдемо відношення постійних часу:  . Так як відношення . Так як відношення  , то перехіний процес розраховуватимемо за формулою , то перехіний процес розраховуватимемо за формулою
.
Тоді
 , ,
де  - корені характеристичного рівняння: - корені характеристичного рівняння:
 . .
Знайдемо корені рівняння:  . Тоді рівняння перехідного процесу матиме вигляд . Тоді рівняння перехідного процесу матиме вигляд
 . .
Крива перехідного процесу автоматичної системи регулювання показана на рис. 12.
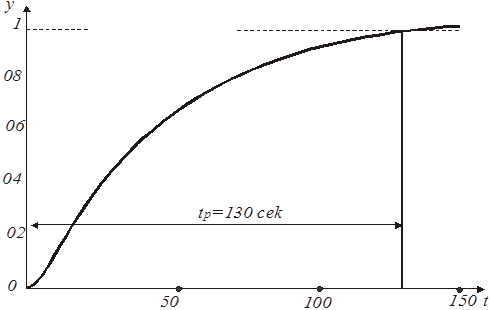
Рис. 12. Крива перехідного процесу АСР
Висновок
З графіка рис.12 видно, що перехідний проце аперіодичний, час регулювання дорівнює 130 сек., а перерегулювання відсутнє.
Література
1.Шувалов В.В., Огаджавнов Г.А., Голубятников В.А. Автоматизация производственных процессов в химической промышленности. – М.: Химия, 1991. – 480 с.
2.Гуров А.М., Починкин С.М. Автоматизация технологических процессов. – М.: Высшая школа, 1979. – 355 с.
3.Автоматическое управление в химической промышленности: Учебник для вузов. Под ред. Е.Г.Дудникова. – М.: Химия, 1987. – 368 с.
4.Автоматизированные системы управления технологическими процессами в металлургии. Учебное пособие. /Медведев Р. Б., Бондарь Ю.Д., Романенко В.Д. – М.: Металлургия, 1987. – 256 с.
5.Автоматизация технологических процессов пищевых производств. /Под ред. Е.Б.Корпина. – М.: Агропромиздат, 1985. – 536 с.
6.Топфер Г., Шрепель Д., Шварц А. Пневматические системы управления. – М.: Энергия. 1972. –88 с.
7. Гиршберг В.В., Доманицкий С.М., Кутлер Н.П. и др. Типовые узлы на полупроводниковых логических и функциональных элементах серии ЭТ. – М.- Л.: Энергия, 1966. – 44 с.
8.Стенцель Й.І. Автоматизація технологічних процесів хімічних виробництв: Навч. посібник. – К.: ІСДО. 1995ю – 360 с.
9.Стенцель Й.І. Метрологія та технологічні вимірювання в хімічній промисловості: Навч. посібник. – Луганськ: вид-во Східноукраїнського нац. ун-ту, 2000. – 261 с.
|