Введение
В данной главе рассматриваются задачи описания упорядоченных данных, полученных последовательно (во времени). Вообще говоря, упорядоченность может иметь место не только во времени, но и в пространстве, например, диаметр нити как функция её длины (одномерный случай), значение температуры воздуха как функция пространственных координат (трёхмерный случай).
В отличие от регрессионного анализа, где порядок строк в матрице наблюдений может быть произвольным, во временных рядах важна упорядоченность, а следовательно, интерес представляет взаимосвязь значений, относящихся к разным моментам времени.
Если значения ряда известны в отдельные моменты времени, то такой ряд называют дискретным
, в отличие от непрерывного
, значения которого известны в любой момент времени. Интервал между двумя последовательными моментами времени назовём тактом
(шагом)
. Здесь будут рассматриваться в основном дискретные временные ряды с фиксированной протяжённостью такта, принимаемой за единицу счёта. Заметим, что временные ряды экономических показателей, как правило, дискретны.
Значения ряда могут быть измеряемыми непосредственно
(цена, доходность, температура), либо агрегированными (кумулятивными)
, например, объём выпуска; расстояние, пройдённое грузоперевозчиками за временной такт.
Если значения ряда определяются детерминированной математической функцией, то ряд называют детерминированным
. Если эти значения могут быть описаны лишь с привлечением вероятностных моделей, то временной ряд называют случайным
.
Явление, протекающее во времени, называют процессом
, поэтому можно говорить о детерминированном или случайном процессах. В последнем случае используют часто термин “стохастический процесс”
. Анализируемый отрезок временного ряда может рассматриваться как частная реализация (выборка) изучаемого стохастического процесса, генерируемого скрытым вероятностным механизмом.
Временные ряды возникают во многих предметных областях и имеют различную природу. Для их изучения предложены различные методы, что делает теорию временных рядов весьма разветвленной дисциплиной. Так, в зависимости от вида временных рядов можно выделить такие разделы теории анализа временных рядов:
– стационарные случайные процессы, описывающие последовательности случайных величин, вероятностные свойства которых не изменяются во времени. Подобные процессы широко распространены в радиотехнике, метереологии, сейсмологии и т. д.
– диффузионные процессы, имеющие место при взаимопроникновении жидкостей и газов.
– точечные процессы, описывающие последовательности событий, таких как поступление заявок на обслуживание, стихийных и техногенных катастроф. Подобные процессы изучаются в теории массового обслуживания.
Мы ограничимся рассмотрением прикладных аспектов анализа временных рядов, которые полезны при решении практических задач в экономике, финансах. Основной упор будет сделан на методы подбора математической модели для описания временного ряда и прогнозирования его поведения.
Практическое изучение временного ряда предполагает выявление свойств ряда и получение выводов о вероятностном механизме, порождающем этот ряд. Основные цели при изучении временного ряда следующие:
– описание характерных особенностей ряда в сжатой форме;
– построение модели временного ряда;
– предсказание будущих значений на основе прошлых наблюдений;
– управление процессом, порождающим временной ряд, путем выборки сигналов, предупреждающих о грядущих неблагоприятных событиях.
Достижение поставленных целей возможно далеко не всегда как из-за недостатка исходных данных (недостаточная длительность наблюдения), так из-за изменчивости со временем статистической структуры ряда.
Перечисленные цели диктуют в значительной мере, последовательность этапов анализа временных рядов:
1) графическое представление и описание поведения ряда;
2) выделение и исключение закономерных, неслучайных составляющих ряда, зависящих от времени;
3) исследование случайной составляющей временного ряда, оставшейся после удаления закономерной составляющей;
4) построение (подбор) математической модели для описания случайной составляющей и проверка ее адекватности;
5) прогнозирование будущих значений ряда.
При анализе временных рядов используются различные методы, наиболее распространенными из которых являются :
1) корреляционный анализ, используемый для выявления характерных особенностей ряда (периодичностей, тенденций и т. д.);
2) спектральный анализ, позволяющий находить периодические составляющие временного ряда;
3) методы сглаживания и фильтрации, предназначенные для преобразования временных рядов с целью удаления высокочастотных и сезонных колебаний;
4) модели авторегрессии и скользящего среднего для исследование случайной составляющей временного ряда ;
5) методы прогнозирования.
Как уже отмечалось, в модели временного ряда принято выделять две основные составляющие : детерминированную и случайную (рис.). Под детерминированной составляющей временного ряда  понимают числовую последовательность понимают числовую последовательность  , элементы которой вычисляются по определенному правилу как функция времени t
. Исключив детерминированную составляющую из данных, мы получим колеблющийся вокруг нуля ряд, который может в одном предельном случае представлять чисто случайные скачки, а в другом – плавное колебательное движение. В большинстве случаев будет нечто среднее: некоторая иррегулярность и определенный систематический эффект, обусловленный зависимостью последовательных членов ряда. , элементы которой вычисляются по определенному правилу как функция времени t
. Исключив детерминированную составляющую из данных, мы получим колеблющийся вокруг нуля ряд, который может в одном предельном случае представлять чисто случайные скачки, а в другом – плавное колебательное движение. В большинстве случаев будет нечто среднее: некоторая иррегулярность и определенный систематический эффект, обусловленный зависимостью последовательных членов ряда.
В свою очередь, детерминированная составляющая может содержать следующие структурные компоненты:
1) тренд g, представляющий собой плавное изменение процесса во времени и обусловленный действием долговременных факторов. В качестве примера таких факторов в экономике можно назвать : а) изменение демографических характеристик популяции (численности, возрастной структуры); б) технологическое и экономическое развитие; в) рост потребления.
2) сезонный эффект s
,
связанный с наличием факторов, действующих циклически с заранее известной периодичностью. Ряд в этом случае имеет иерархическую шкалу времени (например, внутри года есть сезоны, связанные с временами года, кварталы, месяцы) и в одноименных точках ряда имеют место сходные эффекты.
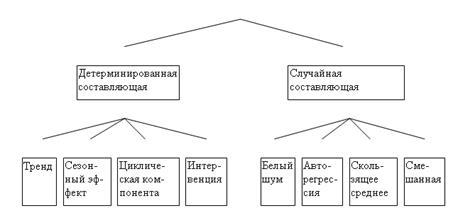
Рис. Структурные компоненты временного ряда.
Типичные примеры сезонного эффекта: изменение загруженности автотрассы в течение суток, по дням недели, временам года, пик продаж товаров для школьников в конце августа - начале сентября. Сезонная компонента со временем может меняться, либо носить плавающий характер. Так на графике объема перевозок авиалайнерами (см рис.) видно, что локальные пики, приходящиеся на праздник Пасхи «плавают» из-за изменчивости ее сроков.
Циклическая компонента c
, описывающая длительные периоды относительного подъема и спада и состоящая из циклов переменной длительности и амплитуды. Подобная компонента весьма характерна для рядов макроэкономических показателей. Циклические изменения обусловлены здесь взаимодействием спроса и предложения, а также наложением таких факторов, как истощение ресурсов, погодные условия, изменения в налоговой политике и т. п. Отметим, что циклическую компоненту крайне трудно идентифицировать формальными методами, исходя только из данных изучаемого ряда.
«Взрывная» компонента i
, иначе интервенция, под которой понимают существенное кратковременное воздействие на временной ряд. Примером интервенции могут служить события «черного вторника» 1994г., когда курс доллара за день вырос на несколько десятков процентов.
Случайная составляющая ряда отражает воздействие многочисленных факторов случайного характера и может иметь разнообразную структуру, начиная от простейшей в виде «белого шума» до весьма сложных, описываемых моделями авторегрессии-скользящего среднего (подробнее дальше).
После выделения структурных компонент необходимо специфицировать форму их вхождения во временной ряд. На верхнем уровне представления с выделением лишь детерминированной и случайной составляющих обычно используют аддитивную либо мультипликативную модели.
Аддитивная модель имеет вид
 ; ;
мультипликативная –
 , ,
где  - значение ряда в момент t
; - значение ряда в момент t
;
 - значение детерминированной составляющей; - значение детерминированной составляющей;
 - значение случайной составляющей. - значение случайной составляющей.
В свою очередь, детерминированная составляющая может быть представлена как аддитивная комбинация детерминированных компонент:
 , ,
как мультипликативная комбинация:
 , ,
либо как смешанная комбинация, например,

Тренд отражает действие постоянных долговременных факторов и носит плавный характер, так что для описания тренда широко используют полиномиальные модели, линейные по параметрам
 , ,
где значения степени k
полинома редко превышает 5.
Наряду с полиномиальными моделями экономические данные, описывающие процессы роста, часто аппроксимируются следующими моделями:
– экспоненциальной
 . .
Эта модель описывает процесс с постоянным темпом прироста, то есть

– логистической

У процесса, описываемого логистической кривой, темп прироста изучаемой характеристики линейно падает с увеличением y
, то есть

– Гомперца
 . .
Эта модель описывает процесс, в котором темп прироста исследуемой характеристики пропорционален ее логарифму
 . .
Две последние модели задают кривые тренда S
-образной формы, представляя процессы с нарастающим темпом роста в начальной стадии с постепенным замедлением в конце.
При подборе подходящей функциональной зависимости, иначе спецификации тренда, весьма полезным является графическое представление временного ряда.
Отметим также, что тренд, отражая действие долговременных факторов, является определяющим при построении долговременных прогнозов.
3.2 Модели сезонной компоненты
Сезонный эффект во временном ряде проявляется на «фоне» тренда и его выделение оказывается возможным после предварительной оценки тренда. (Здесь не рассматриваются методы спектрального анализа, позволяющего выделить вклад сезонной компоненты в спектр без вычисления других компонент ряда). Действительно, линейно растущий ряд помесячных данных будет иметь схожие эффекты в одноименных точках – наименьшее значение в январе и наибольшее в декабре; однако вряд ли здесь уместно говорить о сезонном эффекте: исключив линейный тренд, мы получим ряд, в котором сезонность полностью отсутствует. В то же время ряд, описывающий помесячные объемы продаж новогодних открыток, хотя и будет иметь такую же особенность (минимум продаж в январе и максимум в декабре) будет носить скорее всего колебательный характер относительно тренда, что позволяет специфицировать эти колебания как сезонный эффект.
В простейшем случае сезонный эффект может проявляться в виде строго периодической зависимости.
 , для любого t
, где t
- период сезонности. , для любого t
, где t
- период сезонности.
В общем случае значения, отстоящие на t
могут быть связаны функциональной зависимостью, то есть
 . .
К примеру, сезонный эффект сам может содержать трендовую составляющую, отражающую изменение амплитуды колебаний .
Если сезонный эффект входит в ряд аддитивно, то  модель сезонного эффекта можно записать как модель сезонного эффекта можно записать как
 , ,
где  - булевы, иначе индикаторные, переменные, по одной на каждый такт внутри периода t
сезонности. Так, для ряда месячных данных - булевы, иначе индикаторные, переменные, по одной на каждый такт внутри периода t
сезонности. Так, для ряда месячных данных  =0 для всех t
,
кроме января каждого года, для которого =1 и так далее. Коэффициент =0 для всех t
,
кроме января каждого года, для которого =1 и так далее. Коэффициент  при показывает отклонение январских значений от тренда, при показывает отклонение январских значений от тренда,  - отклонение февральских значений и так далее до - отклонение февральских значений и так далее до  . Чтобы снять неоднозначность в значениях коэффициентов сезонности . Чтобы снять неоднозначность в значениях коэффициентов сезонности  , вводят дополнительное ограничение, так называемое условие репараметризации, обычно , вводят дополнительное ограничение, так называемое условие репараметризации, обычно
 . .
В том случае, когда сезонный эффект носит мультипликативный характер, то есть

модель ряда с использованием индикаторных переменных можно записать в виде

Коэффициенты , в этой модели принято называть сезонными индексами.
Для полностью мультипликативного ряда

обычно проводят процедуру линеаризации операцией логарифмирования
 . .
Условимся называть представленные модели сезонного эффекта «индикаторными». Если сезонный эффект достаточно «гладкий» – близок к гармонике, используют «гармоническое» представление
 , ,
где d
- амплитуда, w
- условия частоты (в радианах в единицу времени), a
- фаза волны. Поскольку фаза обычно заранее неизвестна. Последнее выражение записывают как
 , ,
где  , ,  . .
Параметры А
и В
можно оценить с помощью обычно регрессии. Угловая частота w
считается известной. Если качество подгонки окажется неудовлетворительным, наряду с гармоникой w
основной волны в модель включают дополнительно первую гармонику (с удвоенной основной частотой 2w
), при необходимости и вторую и так далее гармоники. В принципе, из двух представлений: индикаторного и гармоничного – следует выбирать то, которое потребует меньшего числа параметров.
Интервенция, представляющая собой воздействие, существенно превышающее флуктуации ряда, может носить характер «импульса» или «ступеньки».
Импульсное воздействие кратковременно: начавшись, оно почти тут же заканчивается. Ступенчатое воздействие длительно, носит устойчивый характер. Обобщенная модель интервенции имеет вид
 , ,
где  - значение детерминированной компоненты ряда, описываемой как интервенция; - значение детерминированной компоненты ряда, описываемой как интервенция;
 - коэффициенты типа авторегрессии; - коэффициенты типа авторегрессии;
 - коэффициенты типа скользящего среднего; - коэффициенты типа скользящего среднего;
 - экзогенная переменная одного из двух типов; - экзогенная переменная одного из двух типов;
 («ступень»), или («ступень»), или  («импульс») («импульс»)
где  -- фиксированный момент времени, называемый моментом интервенции. -- фиксированный момент времени, называемый моментом интервенции.
Приведенные в п.3.1 спецификации ряда являются параметрическими функциями времени. Оценивание параметров может быть проведено по методу наименьших квадратов так же, как в регрессионном анализе. Хотя статистические предпосылки регрессионного анализа (см п. ) во временных рядах часто не выполняются (особенно п.5 – некоррелированность возмущений), тем не менее оценки тренда оказываются приемлемыми, если модель специфицирована правильно и среди наблюдений нет больших выбросов. Нарушение предпосылок регрессионного анализа сказывается не столько на оценках коэффициентов, сколько на их статистических свойствах, в частности, искажаются оценки дисперсии случайной составляющей и доверительные интервалы для коэффициентов модели.
В литературе описываются методы оценивания в условиях коррелированности возмущений, однако их применение требует дополнительной информации о корреляции наблюдений.
Главная проблема при выделении тренда состоит в том, что подобрать единую спецификацию для всего временного часто невозможно, поскольку меняются условия протекания процесса. Учет этой изменчивости особенно важен, если тренд вычисляется для целей прогнозирования. Здесь сказывается особенность именно временных рядов: данные относящиеся к «далекому прошлому» будут неактуальными, бесполезными или даже «вредными» для оценивания параметров модели текущего периода. Вот почему при анализе временных рядов широко используются процедуры взвешивания данных.
Для учета изменчивости условий модель ряда часто наделяют свойством адаптивности, по крайней мере, на уровне оценок параметров. Адаптивность понимается в том смысле, что оценки параметров легко пересчитываются по мере поступления новых наблюдений. Конечно, и обычному методу наименьших квадратов можно придать черты адаптивности, пересчитывая оценки каждый раз, вовлекая в процесс вычислений старые данные плюс свежие наблюдения. Однако при этом каждый новый пересчет ведет к изменению прошлых оценок, тогда как адаптивные алгоритмы свободны от этого недостатка.
4.1 Скользящие средние
Метод скользящих средних – один из самых старых и широко известных способов выделения детерминированной составляющей временного ряда. Суть метода состоит в усреднении исходного ряда на интервале времени, длина которого выбрана заранее. При этом сам выбранный интервал скользит вдоль ряда, сдвигаясь каждый раз на один такт вправо (отсюда название метода). За счет усреднения удается существенно уменьшить дисперсию случайной составляющей.
Ряд новых значений становится более гладким, вот почему подобную процедуру называют сглаживанием временного ряда.
Процедуру сглаживания рассмотрим вначале для ряда, содержащего лишь трендовую составляющую, на которую аддитивно наложен случайных компонент.
Как известно, гладкая функция может быть локально представлена в виде полинома с довольно высокой степенью точности. Отложим от начала временного ряда интервал времени длиной (2m
+1) точек и построим полином степени m
для отобранных значений и используем этот полином для определения значения тренда в (m
+1
)-й, средней, точке группы.
Построим для определенности полином 3-го порядка для интервала из семи наблюдений. Для удобства дальнейших преобразований занумеруем моменты времени внутри выбранного интервала так, чтобы его середина имела нулевое значение, т.е. t
= -3, -2, -1, 0, 1, 2, 3. Запишем искомый полином:
 . .
Константы  находим методом наименьших квадратов: находим методом наименьших квадратов:
 . .
Дифференцируем по коэффициентам  : :

 ; ;
 ; ;
 . .
Суммы нечетных порядков t от -3 до +3 равны 0, и уравнения сводятся к виду:
  ; ;
   ; ;
  ; ;
   . .
Используя первое и третье из уравнений, получаем при t=0:

 (1) (1)
Следовательно, значение тренда в точке t
= 0 равно средневзвешенному значению семи точек с данной точкой в качестве центральной и весами
 , которые в силу симметрии можно записать короче: , которые в силу симметрии можно записать короче:
 . .
Для того чтобы вычислить значение тренда в следующей, (m+2)-й точке исходного ряда (в нашем случае пятой), следует воспользоваться формулой (1), где значения наблюдений берутся из интервала, сдвинутого на такт вправо, и т.д. до точки N
-
m
.
Далее приводятся формулы для подсчета скользящего среднего подбором полиномов второго и третьего порядка к отрезкам ряда длиной до 9 точек:
количество точек формула
5 
7 
9  . .
Свойства скользящих средних:
1) сумма весов равна единице (т.к. сглаживание ряда , все члены которого равны одной и той же константе, должно приводить к той же константе);
2) веса симметричны относительно серединного значения ;
3) формулы не позволяют вычислить значения тренда для первых и последних m значений ряда;
4) можно вывести формулы для построения трендов на четном числе точек, однако при этом были бы получены значения трендов в серединах временных тактов. Значение тренда в точках наблюдений можно определить в этом случая как полусумма двух соседних значений тренда.
Следует отметить, что при четном числе 2m
тактовв интервале усреднения (двадцать четыре часа в сутки, четыре недели в месяце, двенадцать месяцев в году), широко практикуется простое усреднение с весами  . Пусть имеются, например, наблюдения на последний день каждого месяца с января по декабрь. Простое усреднение 12 точек с весами . Пусть имеются, например, наблюдения на последний день каждого месяца с января по декабрь. Простое усреднение 12 точек с весами  дает значение тренда в середине июля. Чтобы получить значение тренда на конец июля надо взять среднее значение тренда в середине июля и середине августа. Оказывается, это эквивалентно усреднению 13-месячных данных, но значения на краях интервала берут с весами дает значение тренда в середине июля. Чтобы получить значение тренда на конец июля надо взять среднее значение тренда в середине июля и середине августа. Оказывается, это эквивалентно усреднению 13-месячных данных, но значения на краях интервала берут с весами  . Итак, если интервал сглаживания содержит четное число 2m
точек, в усреднении задействуют не 2m
, а 2m
+1 значений ряда : . Итак, если интервал сглаживания содержит четное число 2m
точек, в усреднении задействуют не 2m
, а 2m
+1 значений ряда :
 . .
Скользящие средние, сглаживая исходный ряд, оставляют в нем трендовую и циклическую составляющие. Выбор величины интервала сглаживания должен делаться из содержательных соображений. Если ряд содержит сезонный компонент, то величина интервала сглаживания выбирается равной или кратной периоду сезонности. В отсутствии сезонности интервал сглаживания берется обычно в диапазоне три-семь
Эффект Слуцкого-Юла
Рассмотрим, как влияет процесс сглаживания на случайную составляющую ряда, относительно которой будем полагать, что она центрирована и соседние члены ряда некоррелированы.
Скользящее среднее случайного ряда x
есть:
 . .
В силу центрированности x
и отсутствия корреляций между членами исходного ряда имеем:
 и и  . .
Далее,  . .
Из полученных соотношений видно, что усреднение приводит к уменьшению дисперсии колебаний. Кроме того члены ряда, полученные в результате усреднения, не являются теперь независимыми. Производный, сглаженный, ряд имеет ненулевые автокорреляции (корреляции между членами ряда, разделенных k-1 наблюдениями) вплоть до порядка 2m. Таким образом производный ряд будет более гладким, чем исходный случайный ряд, и в нем могут проявляться систематические колебания. Этот эффект называется эффектом Слуцкого-Юла .
Если имеется ряд, содержащий полином (или локально представляемый полиномом) с наложенным на него случайным элементом , то было бы естественно исследовать, нельзя ли исключить полиномиальную часть вычислением последовательных разностей ряда. Действительно, разности полинома порядка k представляют собой полином порядка k-1. Далее , если ряд содержит полином порядка p , то переход к разностям , повторенный (p+1) раз, исключает его и оставляет элементы, связанные со случайной компонентой исходного ряда.
Рассмотрим, к примеру, переход к разностям в ряде, содержащим полином третьего порядка.
 0 1 8 27 64 125 0 1 8 27 64 125
 1 7 19 37 61 1 7 19 37 61
 6 12 18 24 6 12 18 24
 6 6 6 6 6 6
 0 0 0 0
Взятие разностей преобразует случайную составляющую ряда.
В общем случае получаем :
 ; ;
 ; ;
 ; ;
 ; ;
 . .
Из последнего соотношения получаем
 . .
Следовательно, метод последовательных разностей переменной состоит в вычислении первых, вторых, третьих и т.д. разностей , определении сумм квадратов, делении на  и т.д. и обнаружения момента , когда это отношение становится постоянным. Таким образом мы получаем оценки порядка полинома , содержащегося в исходном ряде, и дисперсии случайного компонента. и т.д. и обнаружения момента , когда это отношение становится постоянным. Таким образом мы получаем оценки порядка полинома , содержащегося в исходном ряде, и дисперсии случайного компонента.
Методы построения функций для описания наблюдений до сих пор основывался на критерии наименьших квадратов, в соответствии с которым все наблюдения имеют равный вес. Однако, можно предположить, что недавним точкам следует придавать в некотором смысле больший вес, а наблюдения, относящиеся к далекому прошлому, должны иметь по сравнению с ними меньшую ценность. До некоторой степени мы учитывали это в скользящих средних с конечной длиной отрезка усреднения, где значения весов, приписываемых группе из 2m+1 значений, не зависят от предшествующих значений. Теперь обратимся к другому методу выделения более «свежих» наблюдений.
Рассмотрим ряд весов, пропорциональных множителю b, а именно  и т.д. Так как сумма весов должна равняться единице, т.е. и т.д. Так как сумма весов должна равняться единице, т.е.  , весами фактически будут , весами фактически будут  и т.д. ( предполагается , что 0<b<1.) и т.д. ( предполагается , что 0<b<1.)
4.3.1 Простое экспоненциальное сглаживание
Рассмотрим простейший ряд  , равный сумме постоянной , равный сумме постоянной  (уровень) и случайной компоненты (уровень) и случайной компоненты  : :
 . .
Будем считать, что ряд имеет бесконечную предысторию, т. е. время принимает значения t,t-1,t-2,..., - ¥ . Найдем оценку  уровня ряда , воспользовавшись минимизацией взвешенной суммы квадратов: уровня ряда , воспользовавшись минимизацией взвешенной суммы квадратов:
 . .
В приведенном выражении расхождения между наблюденными значениями ряда и оценкой уровня берутся с экспоненциально убывающими весами в зависимости от возраста данных.
 ; ;  ; ;  . .
Полученную оценку на момент t
обозначим (t
). Сглаженное значение в момент t
можно выразить через сглаженное значение в прошлый момент t
-1 и новое наблюдение  : :
  
Полученное соотношение
(t
) =
Перепишем несколько иначе, введя так называемую постоянную сглаживания  (0 £a
£1). (0 £a
£1).
(t
)  , ,
Из полученного соотношения видно, что новое сглаженное значение получается из предыдущего коррекцией последнего на долю ошибки, рассогласования, между новым и прогнозным значениями ряда. Происходит своего рода адаптация уровня ряда к новым данным.
4.3.2 Экспоненциальное сглаживание высоких порядков
Обобщим метод экспоненциального сглаживания на случай , когда модель процесса определяется линейной функцией  . Как и прежде, при заданном b минимизируем: . Как и прежде, при заданном b минимизируем:
 . .
(Здесь для удобства представления знаки ~ и Ù опущены).
 , ,


С учетом того что
 , ,  , ,
получаем

Запишем :  . .
Эту операцию можно рассматривать как сглаживание 1-го порядка. По аналогии построим сглаживание 2-го порядка:

 . .
ß

 ; ;  . .
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 . .
Рассмотренную выше процедуру можно обобщить на случай полиномиальных трендов более высокого порядка n , при этом алгебраические выражения будут сложнее. Например, если модель описывается параболой, то используется метод тройного экспоненциального сглаживания.
Сезонные компоненты могут представлять самостоятельный интерес либо выступать в роли мешающего фактора. В первом случае необходимо уметь выделять их из ряда и оценивать параметры соответствующей модели. Что же касается удаления сезонной компоненты из ряда, то здесь возможны несколько способов.
Рассмотрим сначала процедуру оценивания сезонных эффектов. Пусть исходный ряд является полностью аддитивным, то есть
 . .
Необходимо оценить  по наблюденным . Иными словами, необходимо получить оценки по наблюденным . Иными словами, необходимо получить оценки  коэффициентов коэффициентов  индикаторной модели. индикаторной модели.
Как уже отмечалось, сезонный эффект проявляется на фоне тренда, поэтому вначале необходимо оценить трендовую составляющую одним из рассмотренных методов. Затем для каждого сезона  вычисляют все относящиеся к нему разности вычисляют все относящиеся к нему разности

где, как обычно,  - наблюденное значение ряда, - наблюденное значение ряда,  - оцененное значение тренда. - оцененное значение тренда.
Каждая из этих разностей дает совместную оценку сезонного эффекта и случайного компонента, отличного, правда, от исходного  в силу взятия разностей. в силу взятия разностей.
Производя усреднение полученных разностей, получают оценки эффектов. Полагая, что исходный ряд содержит целое число k
периодов сезонности и ограничиваясь простым средним, имеем

С учетом условия репараметризации, требующим, чтобы сумма сезонных эффектов равнялась нулю, получаем скорректированные оценки
 . .
В случае мультипликативного сезонного эффекта, когда модель ряда имеет вид
 , ,
вычисляют уже не разности, а отношения
 . .
В качестве оценки сезонного индекса  выступает среднее выступает среднее
 . .
На практике считается, что для оценки сезонных эффектов временной ряд должен содержать не менее пяти-шести периодов сезонности.
Перейдем теперь к способам удаления сезонного эффекта из ряда. Таких способов два. Первый из них назовем «послетрендовый». Он является логическим следствием рассмотренной выше процедуры оценивания. Для аддитивной модели удаление сезонной компоненты сводится к вычитанию оцененной сезонной компоненты из исходного ряда. Для мультипликативной модели значения ряда делят на соответствующие сезонные индексы.
Второй способ не требует предварительной оценки ни трендовой, ни сезонной компонент, а основывается на использовании разностных операторов.
Разностные операторы.
При исследовании временных рядов часто имеется возможность представить детерминированные функции времени простыми рекуррентными уравнениями. К примеру, линейный тренд
 (1) (1)
можно записать как
 (2) (2)
Последнее соотношение получается из (1) сравнением двух значений ряда для соседних моментов t
-1 и t
. Учитывая, что соотношение (2) справедливо и для моментов t
-2 и t
-
1, так что  , модель (1) можно записать и в виде , модель (1) можно записать и в виде
 (3) (3)
Модель (3) не содержит явно параметров, описывающих тренд. Более компактно описанные преобразования можно описать, используя операторы взятия разности назад
 . .
 . .
Модели (2) и (3) можно записать как
 , ,  . .
Выходит, разность второго порядка полностью исключает из исходного ряда линейный тренд. Легко видеть, что разность порядка d
исключает из ряда полиномиальный тренд порядка d
-1. Пусть теперь ряд содержит сезонный эффект с периодом t
, так что
 (4). (4).
Процедура перехода от ряда (t
= 1,2,...,T
) к ряду  называется взятием первой сезонной разности, а оператор называется взятием первой сезонной разности, а оператор  сезонным разностным оператором с периодом t
. Из (4) следует, что сезонным разностным оператором с периодом t
. Из (4) следует, что
 . .
Выходит, взятие сезонной разности  исключает из временного ряда любую детерминированную сезонную компоненту. исключает из временного ряда любую детерминированную сезонную компоненту.
Иногда оказываются полезными сезонные операторы более высоких порядков. Так, сезонный оператор второго порядка с периодом t
есть
 . .
Если ряд содержит и тренд, и сезонную составляющую, их можно исключить, последовательно применяя операторы  и . и .
Легко показать, что порядок применения этих операторов не существенен:
 . .
Отметим также, что детерминированный тренд, состоящий из тренда и сезонной компоненты, после применения операторов и полностью вырождается, то есть  . Однако записав последнее уравнение в рекуррентной форме, получаем . Однако записав последнее уравнение в рекуррентной форме, получаем
 . .
Из последнее соотношения видно, каким образом ряд можно неограниченно продолжать, имея вначале по крайней мере t
+1 последовательных значения.
линейный ряд временной система
Для удобства изложения условимся обозначать здесь случайные величины так, как это принято в математической статистике – строчными буквами.
Случайным процессом X
(
t
)
на множестве Т называют функцию, значения которой случайны при каждом t
ÎT. Если элементы Т счетные (дискретное время), то случайный процесс часто называют случайной последовательностью.
Полное математическое описание случайного процесса предполагает задание системы функций распределения:
– для каждого t
ÎT , (1) , (1)
– для каждой пары элементов 
 (2) (2)
и вообще для любого конечного числа элементов

 (3). (3).
Функции (1),(2),(3) называют конечномерными распределениями случайного процесса.
Построить такую систему функции для произвольного случайного процесса практически невозможно. Обычно случайные процессы задают с помощью априорных предположений о его свойствах, таких как независимость приращений, марковский характер траекторий и т. п.
Процесс, у которого все конечномерные распределения нормальны, называется нормальным (гауссовским). Оказывается, что для полного описания такого процесса достаточно знания одно- и двумерного распределений (1), (2), что важно с практической точки зрения, поскольку позволяет ограничиться исследованием математического ожидания и корреляционной функцией процесса.
В теории временных рядов используются ряд моделей случайной составляющей, начиная от простейшей – «белого шума», до весьма сложных типа авторегрессии – скользящего среднего и других, которые строятся на базе белого шума.
Прежде чем определять процесс белого шума рассмотрим последовательность независимых случайных величин, для которой функция распределения есть
 . .
Из последнего соотношения следует, что все конечномерные распределения последовательности определяются с помощью одномерных распределений.
Если к тому же в такой последовательности составляющие ее случайные величины X
(t
) имеют нулевое математическое ожидание и распределены одинаково при всех t
ÎT, то это – «белый шум». В случая нормальности распределения X
(t
) говорят о гауссовском белом шуме. Итак, гауссовский белый шум – последовательность независимых нормально распределенных случайных величин с нулевым математическим ожиданием и одинаковой (общей) дисперсией.
Более сложными моделями, широко используемыми в теории и практике анализа временных рядов, являются линейные модели: процессы скользящего среднего, авторегрессии и смешанные.
Процесс скользящего среднего порядка q
 представляет собой взвешенную сумму случайных возмущений: представляет собой взвешенную сумму случайных возмущений:
 (4), (4),
где  – независимые одинаково распределенные случайные величины (белый шум); – независимые одинаково распределенные случайные величины (белый шум);
 – числовые коэффициенты. – числовые коэффициенты.
Легко видеть из определения, что у процесса скользящего среднего порядка q
(сокращенно CC(q
)) статистически зависимыми являются (q
+1) подряд идущих величин X
(t
), X
(t
-1),..., X
(t
-
q
). Члены ряда, отстоящие друг от друга больше чем на (q
+1) такт, статистически независимы, поскольку в их формировании участвуют разные слагаемые  . .
Процессом авторегрессии порядка p
(сокращенно АР(р
)) называют взвешенную возмущенную сумму p
прошлых значений временного ряда
 (5), (5),
где – случайное возмущение, действующее в текущий момент t
;
 – числовые коэффициенты. – числовые коэффициенты.
Выражая последовательно в соответствии с соотношением (5) X
(t-1) через X
(t-2), . . . , X
(t-p-1), затем X
(t-2) через X
(t-3), . . . , X
(t-p-2) и т.д. получим, что X
(t) есть бесконечная сумма прошлых возмущений  Из этого следует, члены процесса авторегрессии X(t) и X
(t-k) статистически зависимы при любомk
. Из этого следует, члены процесса авторегрессии X(t) и X
(t-k) статистически зависимы при любомk
.
Процесс АР(1) часто называют процессом Маркова, АР(2) – процессом Юла. В общем случае марковским называют такой процесс, будущее которого определяется только его состоянием в настоящем и воздействиями на процесс, которые будут оказываться в будущем, тогда как его состояние до настоящего момента при этом несущественно. Процесс АР(1)

является марковским, поскольку его состояние в любой момент  определяется через значения процесса , если известна величина определяется через значения процесса , если известна величина  в момент в момент  . Формально процесс авторегресси произвольного порядка . Формально процесс авторегресси произвольного порядка  также можно считать марковским, если его состоянием в момент t
считать набор также можно считать марковским, если его состоянием в момент t
считать набор
(X
(t),X
(t-1), . . . , X
(t-p-1)) .
Более полно модели СС, АР, а также их композиция: модели авторегрессии – скользящего среднего рассматриваются далее (п.10.1.5 ). Заметим только, что все они представляются частными случаями общей линейной модели
 (6) (6)
где – весовые коэффициенты, число которых, вообще-то говоря, бесконечно.
Среди моделей случайной составляющей выделим важный класс – стационарные процессы, такие, свойства которых не меняются во времени. Случайный процесс Y(t) называется стационарным, если для любых n
,  распределения случайных величин распределения случайных величин  и и  одинаковы. Иными словами, функции конечномерных распределений не меняются при сдвиге времени: одинаковы. Иными словами, функции конечномерных распределений не меняются при сдвиге времени:
 . .
Образующие стационарную последовательность случайные величины распределены одинаково, так что определенный выше процесс белого шума является стационарным.
7.Числовые характеристики случайной составляющей
При анализе временных рядов используются числовые характеристики, аналогичные характеристикам случайных величин:
– математическое ожидание (среднее значение процесса)
 ; ;
– автоковариационная функция
 ; ;
– дисперсия
 ; ;
– стандартное отклонение

– автокорреляционная функция

– частная автокорреляционная функция
Заметим, что в операторе функции  усреднение происходит при неизменном t
, то есть имеется математическое ожидание по множеству реализаций (вообще-то говоря, потенциальных поскольку «в реку времени нельзя войти дважды»). усреднение происходит при неизменном t
, то есть имеется математическое ожидание по множеству реализаций (вообще-то говоря, потенциальных поскольку «в реку времени нельзя войти дважды»).
Рассмотрим введенные числовые характеристики для стационарных процессов. Из определения стационарности следует, что для любых s
,
t
и 

положив = - t
, получаем
 (1) (1)
Выходит, у стационарного процесса математическое ожидание и дисперсия одинаковы при любом t
, а автоковариационная и автокорреляционная функции зависят не от момента времени s
илиt
, а лишь от их разности (лага).
Отметим, что выполнение свойств (1) еще не влечет стационарности в смысле определения из п.6. Тем не менее постоянство первых двух моментов, а также зависимость автокорреляционной функции только от лага определенно отражает некоторую неизменность процесса во времени. Если выполнены условия (1), то говорят о стационарности процесса в широком смысле, тогда как выполнение условий ( ) означает стационарность в узком (строгом) смысле.
Данное выше определение белого шума надо трактовать в узком смысле. На практике часто ограничиваются белым шумом в широком смысле, под которым понимают временной ряд (случайный процесс), у которого =0 и

Отметим, что гаусовский процесс, стационарный в узком смысле, стационарен и в широком смысле.
О стационарности в широком смысле судить гораздо проще. Для этого используют различные статистические критерии, базирующиеся на одной реализации случайного процесса.
Оценивание числовых характеристик случайного временного ряда в каждый момент времени требует набора реализаций (траекторий) соответствующего случайного процесса. Хотя время и не воспроизводимо, однако условия протекания процесса иногда можно считать повторяющимися. Особенно это характерно для технических приложений, например, колебания напряжения в электрической сети в течении суток. Временные ряды, наблюдаемые в разные сутки, можно считать независимыми реализациями одного случайного процесса.
Иная ситуация при исследовании процессов социально-экономической природы. Как правило, здесь доступна единственная реализация процесса, повторить которую не представляется возможным. Следовательно, получить оценки среднего, дисперсии, ковариации нельзя. Однако для стационарных процессов подобные оценки все-таки возможны. Пусть  наблюденные значения временного ряда в моменты наблюденные значения временного ряда в моменты  соответственно. Традиционная оценка среднего соответственно. Традиционная оценка среднего  может служить оценкой математического ожидания стационарного (в широком смысле) случайного процесса. может служить оценкой математического ожидания стационарного (в широком смысле) случайного процесса.
Ясно, что такая оценка для стационарного ряда будет несмещенной. Состоятельность этой оценки устанавливается теоремой Слуцкого, которая в качестве необходимого и достаточного условия требует чтобы
 , ,
где  – автокорреляционная функция процесса. – автокорреляционная функция процесса.
Точность оценивания среднего зависит от длины N
ряда. Считается, что длина N
всегда должна быть не меньше так называемого времени корреляции, под которым понимают величину
T
= . .
Величина Т
дает представление о порядке величины промежутка времени , на котором сохраняется заметная корреляция между двумя значениями ряда.
Рассмотрим теперь получение оценок значений автокорреляционной функции. Как и прежде, – наблюденные значения временного ряда. Образуем (N
-1) пар  . Эти пары можно рассматривать как выборку двух случайных величин, для которых можно определить оценку стандартного коэффициента корреляции . Эти пары можно рассматривать как выборку двух случайных величин, для которых можно определить оценку стандартного коэффициента корреляции  . Затем составим (N
-2) пар . Затем составим (N
-2) пар  и определим оценку и определим оценку  и т.д. Поскольку при подсчете очередного и т.д. Поскольку при подсчете очередного  объем выборки меняется, меняется значение среднего и стандартного отклонения для соответствующего набора значений. Для упрощения принято измерять все переменные относительно среднего значения всего ряда и заменять дисперсионные члены в знаменателе на дисперсию ряда в целом, то есть объем выборки меняется, меняется значение среднего и стандартного отклонения для соответствующего набора значений. Для упрощения принято измерять все переменные относительно среднего значения всего ряда и заменять дисперсионные члены в знаменателе на дисперсию ряда в целом, то есть
 , ,
где  - среднее, равное - среднее, равное  . .
При больших N
расхождение в оценках незначительные. На практике k
берут не выше N
/4.
Если ряд рассматривается как генеральная совокупность бесконечной длины, то говорят об автокорреляциях (теоретических) и обозначают их  . Массив коэффициентов . Массив коэффициентов  или соответствующих им выборочных коэффициентов или соответствующих им выборочных коэффициентов  содержат весьма ценную информацию о внутренней структуре ряда. Совокупность коэффициентов корреляции, нанесенная на график с координатами k
(лаг) по оси абсцисс и либо содержат весьма ценную информацию о внутренней структуре ряда. Совокупность коэффициентов корреляции, нанесенная на график с координатами k
(лаг) по оси абсцисс и либо  по оси ординат, называют коррелограммой (теоретической или выборочной соответственно). по оси ординат, называют коррелограммой (теоретической или выборочной соответственно).
Точностные характеристики оценки получены для гауссовских процессов. В частности, для гаусовского белого шума, у которого все корреляции равны нулю,  . Математическое ожидание для гауссовского белого шума оказывается не равным нулю, а именно, . Математическое ожидание для гауссовского белого шума оказывается не равным нулю, а именно,  , то есть оценка оказывается смещенной. Величина смещения убывает с ростом объема выборки и не столь существенна в прикладном анализе. , то есть оценка оказывается смещенной. Величина смещения убывает с ростом объема выборки и не столь существенна в прикладном анализе.
Оценка асимптотически нормальна при  , что дает основание для построения приблизительного доверительного интервала. Широко применяемый 95%-интервал есть , что дает основание для построения приблизительного доверительного интервала. Широко применяемый 95%-интервал есть  . .
Границы доверительного интервала, нанесенные на график, называют доверительной трубкой. Если коррелограмма некоторого случайного процесса не выходит за пределы доверительной трубки, то этот процесс близок к белому шуму. Правда, это условие можно считать лишь достаточным. Нередко выборочная коррелограмма гауссовского белого шума содержит один, а то и два выброса среди первых 20 оценок , что естественно затрудняет интерпретацию подобной коррелограммы.
Наряду с автокорреляционной функцией при анализе структуры случайного временного ряда используется частная автокорреляционная функция, значения которой суть частные коэффициенты корреляции.
Простейшей гипотезой, которую можно выдвинуть относительно колеблющегося ряда, не имеющего явно выраженного тренда, является предположение, что колебания случайны. В случайных рядах, согласно гипотезе, наблюдения независимы и могут следовать в любом порядке. Для проверки на случайность желательно использовать критерий, не требующий каких-либо ограничений на вид распределения совокупности, из которой, по предположению, извлекаются наблюдаемые значения.
1. Критерий поворотных точек
состоит в подсчёте пиков (величин, которые больше двух соседних) и впадин (величин, которые меньше двух соседних). Рассмотрим ряд y1
,...,yN
.
   пик впадина пик впадина
yt-1
< yt
> yt+1
yt-1
> yt
< yt+1
yt-1
yt
yt+1
yt-1
yt
yt+1
Рис. Поворотные точки.
Для определения поворотной точки требуются три последовательных значения. Начальное и конечное значения не могут быть поворотными точками, т. к. неизвестно y0
и yN+1
. Если ряд случаен, то эти три значения могут следовать в любом из шести возможных порядков с равной вероятностью. Только в четырёх из них будет поворотная точка, а именно, когда наибольшее или наименьшее из трёх значений находится в середине. Следовательно, вероятность обнаружения поворотной точки в любой группе из трёх значений равна 2/3.
           с с c c c c с с c c c c
  b b b bbb b b b bbb
 а а a a a a а а a a a a
Рис. Варианты взаимного расположения трёх точек.
Для группы из N величин определим счётную переменную Х.
ì 1, если yt-1
< yt
> yt+1
или yt-1
> yt
< yt+1
Х = í
î 0, в противном случае.
Тогда число поворотных точек р в ряде есть просто  , а их математическое ожидание есть М[p]=2/3(N-2). Дисперсия числа поворотных точек вычисляется по формуле D[p]=(16N-29)/90, а само распределение близко к нормальному. , а их математическое ожидание есть М[p]=2/3(N-2). Дисперсия числа поворотных точек вычисляется по формуле D[p]=(16N-29)/90, а само распределение близко к нормальному.
2. Критерий, основанный на определении длины фазы
Интервал между двумя поворотными точками называется фазой. Для того , чтобы установить наличие фазы длины d (например, восходящей) , нужно обнаружить d+3 членов, содержащих падение от первого члена ко второму ,затем последовательный подъем до (d+2)-го члена и падение к (d+3)-ему члену.
    
1 2 3 4 d+1 d+2 d+3 N
рис. 3. Фаза длины d.
Рассмотрим группу из d+3 чисел, расположенных в порядке возрастания. Если, не трогая двух крайних членов, извлечь пару чисел из оставшихся d+1 и одно из них поставить в начало, а другое в конец, получим фазу длины d. Существует  способов такого выбора пары чисел и каждый член пары может быть поставлен в любой конец, следовательно число восходящих фаз равно d(d+1). способов такого выбора пары чисел и каждый член пары может быть поставлен в любой конец, следовательно число восходящих фаз равно d(d+1).
Кроме того, поворотные точки будут иметь место, если первый член последовательности поставить в конец, а любой из оставшихся, за исключением второго, поместить в начало. Число таких последовательностей составит (
d
+1)
. Еще столько же последовательностей получиться если последний член в исходной, возрастающей, последовательности поставить в начало, а любой другой, кроме последнего, в конец. Во избежании двойного счета следует исключить случай, когда первый член ставится на последнее место, а последний на первое. Таким образом, в последовательности из (
d
+3)
чисел с фазой длиной d
число случаев роста составит
d
(d
+1)+2(d
+1)-1 = +3d
+1 . +3d
+1 .
Число возможных последовательностей из (
d
+3)
чисел равняется числу перестановок (
d
+3)
!, так что вероятность либо восходящей, либо нисходящей фазы равна
 . .
В ряде длины N последовательно можно выделить N-2-d групп по d+3 членов. Т.о. математическое ожидание числа фаз длины d
 . .
Можно показать, что математическое ожидание общего числа фаз длины от 1 до N-3
 . .
3
.Критерий , основанный на знаках разностей
Данный критерий состоит в подсчете числа положительных разностей первого порядка в ряде , иначе говоря, числа точек возрастания ряда. Для ряда из N членов получаем N-1 разностей . Определим счетную переменную как

Если теперь обозначить через с
число точек возрастания случайного ряда , то
 . .
Распределение довольно быстро стремится к нормальному с дисперсией
 . .
В основном данный критерий рекомендуется для проверки наличия линейного тренда . С другой стороны, критерий, основанный на поворотных точках , плохо подходит для обнаружения тренда, т.к. наложение заметных случайных колебаний на умеренный тренд приводит примерно к тому же множеству поворотных точек, что и при отсутствии тренда. .Более совершенным, но более сложным критерием для обнаружения линейного тренда являются регрессия y на t и проверка значимости регрессионного коэффициента.
4.Критерий, основанный на ранговых сравнениях
Идею сравнения соседних значений ряда можно развить до сравнения всех значений. Для данного ряда подсчитаем число случаев, когда очередной член ряда превышает все последующие. Всего для сравнения имеется  N(N-1) пар. Пусть n
общее число случаев превышения. Подсчитывают ранговый коэффициент корреляции Кендэла N(N-1) пар. Пусть n
общее число случаев превышения. Подсчитывают ранговый коэффициент корреляции Кендэла
 . .
Если этот коэффициент значим и положителен, то ряд возрастающий, если отрицателен, то - убывающий.
Рассматривается общая линейная модель стохастического процесса
 , (1) , (1)
где  – белый шум – белый шум
 – весовые коэффициенты. – весовые коэффициенты.
Напомним, что =0, =0,  , , 
Введем оператор сдвига на один шаг назад В
: 
Многократное (для определенности j
-кратное) применения оператора В
, обозначаем как  , дает , дает  С учетом введенных обозначений общую линейную модель можно записать как С учетом введенных обозначений общую линейную модель можно записать как
 ( ( ) )
где  – линейный оператор. – линейный оператор.
Найдем математическое ожидание, дисперсию и автоковариационную функцию для процесса (1):
 ; ;

Для того чтобы модель имела смысл, дисперсия  должна быть конечной, то есть предполагается, что ряд должна быть конечной, то есть предполагается, что ряд  сходится. сходится.
Кроме этого предполагают, что имеет место так называемое условие обратимости:
 , ,
где вместо В
фигурируют комплексные числа. Из этого условия вытекает существование обратного оператора
 , ,
где  , то есть такого, что , то есть такого, что

Раскрывая произведение в последнем выражении, группируя однородные по  члены и приравнивая их к нулю, получают выражения для определения коэффициентов члены и приравнивая их к нулю, получают выражения для определения коэффициентов  . Так, . Так,  и так далее. и так далее.
Умножая () на  слева, получим, что обратимый процесс может быть записан в виде слева, получим, что обратимый процесс может быть записан в виде
 , ,
или
 (2) (2)
Запись (2) соответствует авторегрессионой схеме бесконечного порядка. Это же соотношение можно трактовать как линейный предиктор для по всем прошлым значениям временного ряда, а слагаемое – как случайную ошибку этого предиктора. Если известны все прошлые значения ряда, то по форме (2) можно спрогнозировать будущее значение ряда.
10.1\. Модели авторегрессии
Рассмотрим более подробно модели случайной составляющей, являющиеся частными случаями общей линейной модели, а именно модели авторегрессии, скользящего среднего и смешанные, широко применяемые на практике.
10.1.1 Авторегрессия первого порядка (марковский процесс)
Модель АР(1) имеет вид
 . .
С использованием оператора сдвига В модель примет вид
 . .
Отсюда


Рассматривая  как сумму бесконечно убывающей геометрической прогрессии со знаменателем а
В
получаем, что как сумму бесконечно убывающей геометрической прогрессии со знаменателем а
В
получаем, что
 (2) (2)
Таким образом, марковский процесс есть частный случай общей линейной модели, коэффициенты которой меняются по закону геометрической прогрессии, то есть  . .
Выражение (2) можно получить и из (1) непосредственно, выражая  через через  , через , через  и т.д. и т.д.
Дисперсия  в соответствие с () есть в соответствие с () есть

Выходит, белый шум с дисперсией  порождает в схеме Маркова случайный процесс с возросшей дисперсией, равной порождает в схеме Маркова случайный процесс с возросшей дисперсией, равной  . .
Для нахождения автоковариационной функции Марковского процесса можно воспользоваться общим выражением ( ). Однако более нагляден следующий путь. Домножим уравнение (1) марковского процесса на и возьмем математическое ожидание
 . .
Поскольку второе слагаемое в правой части равно нулю в силу некоррелированности возмущения в текущий момент с прошлыми значениями ряда , получаем

( в силу стационарности ) в силу стационарности )
Из последнего соотношения имеем
 , ,
то есть а
совпадает с коэффициентом автокорреляции  средних членов ряда. Умножим теперь (1) на средних членов ряда. Умножим теперь (1) на  и возьмем математическое ожидание: и возьмем математическое ожидание:
 . .
Заменяя а
на и деля на  , получаем , получаем
 . .
Придавая k
значения 2,3,… получим
 . .
Итак, в марковском процессе все автокорреляции можно выразить через первую автокорреляцию. Поскольку  , автокорреляционная функция марковского процесса экспоненциально убывает при росте k
. , автокорреляционная функция марковского процесса экспоненциально убывает при росте k
.
Рассмотрим теперь частную автокорреляционную функцию марковского процесса. Мы получили, что корреляция между двумя членами ряда, отстоящими на два такта, то есть между  и выражается величиной и выражается величиной  . Но зависит от . Но зависит от  , а от . Возникает вопрос, сохранится ли зависимость между и , если зависимость от срединного члена устранена. Соответствующий частный коэффициент корреляции есть , а от . Возникает вопрос, сохранится ли зависимость между и , если зависимость от срединного члена устранена. Соответствующий частный коэффициент корреляции есть
 . .
Поскольку  , числитель равен нулю. Аналогично можно показать, что частные коэффициенты корреляции для членов ряда, отстоящих на 3,4 и так далее тактов, также равны нулю. Таким образом, автокорреляция существует только благодаря корреляции соседних членов, что впрочем следует из математической модели марковского процесса. , числитель равен нулю. Аналогично можно показать, что частные коэффициенты корреляции для членов ряда, отстоящих на 3,4 и так далее тактов, также равны нулю. Таким образом, автокорреляция существует только благодаря корреляции соседних членов, что впрочем следует из математической модели марковского процесса.
Завершая рассмотрение модели АР(1), отметим, что она весьма часто используется в экономико-математических исследованиях для описания остатков линейной регрессии, связывающей экономические показатели.
Авторерессия второго порядка (процесс Юла)
Авторегрессионный процесс Юла АР(2) описывается уравнением
 (1) (1)
С использованием оператора сдвига В
модель запишется как
 , ,
где а(В)
– авторегрессионный оператор, то есть а(В)=
 . .
Свойства модели зависят от корней  и и  полинома полинома
=0, (2)
который можно записать также в виде
(1-В
)(1-В
)=0.
Для стационарности процесса (1) необходимо, чтобы корни и лежали внутри единичной окружности (случай комплексных корней), либо были меньше единицы (случай действительных корней), что обеспечивается при  . .
Пусть и действительны и различны. Разложим  на простые дроби на простые дроби
 , (3) , (3)
где  . .
Рассматривая отдельные слагаемые в (3) как суммы бесконечных геометрических прогрессий, получим
 . .
Выходит АР(2) есть частный случай общей линейной модели ( ) с коэффициентами
 . .
Рассмотрим теперь автокорреляционную функцию процесса Юла. Умножим (1) по очереди на  и , возьмем математические ожидания и разделим на . В итоге получим и , возьмем математические ожидания и разделим на . В итоге получим

Этих уравнений достаточно для определения  через первые две автокорреляции и, наоборот, по известным можно найти через первые две автокорреляции и, наоборот, по известным можно найти  . .
Умножая теперь (1) на  получим рекуррентное уравнение получим рекуррентное уравнение
 , (4) , (4)
из которого можно найти автокорреляции высоких порядков через первые автокорреляции. Тем самым, полностью определяется коррелограмма процесса Юла.
Исследуем вид коррелограммы процесса АР(2).
Выражение (4) можно рассматривать как разностное уравнение второго порядка относительно r
с постоянными коэффициентами.
Общее решение такого уравнения имеет вид
 , ,
где  – корни характеристического уравнения – корни характеристического уравнения
 (5) (5)
Легко видеть, что уравнения (2) и (5) эквивалентны с точностью до замены В
на z
и деления обоих частей на  , так что корни этих уравнений совпадают, то есть , так что корни этих уравнений совпадают, то есть 
Общее решение разностного уравнения (4) есть
 (6) (6)
где коэффициенты А
и В
находят из граничных условий при j
=0 и j
=1.
Таким образом, в случае действительных корней коррелограмма АР(2) представляет собой, как видно из (6), смесь двух затухающих экспонент.
В случае комплектности корней и коррелограмма процесса АР(2) оказывается затухающей гармоникой.
Рассмотрим теперь как ведет себя частная автокорреляционная функция процесса Юла. Отличным от нуля оказывается лишь коэффициент  , равный , равный  . Частные корреляции более высоких порядков равны нулю (подробнее этот процесс рассматривается дальше). Таким образом, частная коррелограмма процесса отрывается сразу после лага, равного единице. . Частные корреляции более высоких порядков равны нулю (подробнее этот процесс рассматривается дальше). Таким образом, частная коррелограмма процесса отрывается сразу после лага, равного единице.
В заключении отметим, что модели АР(2) оказались приемлемыми при описании поведения циклической природы, прообразом которого служит маятник, на который воздействуют малые случайные импульсы. Амплитуда и фаза такого колебательного процесса будут все время меняться.
10.1.3. Авторегрессия порядка р
Процесс авторегрессии порядка р
, кратко АР(р
), описывается выражением
 (1) (1)
или
 ( ) ( )
Решение разностного относительно y выражения (1) или () состоит из двух частей: общего решения, содержащего р
произвольных констант, и частного решения. Общее решение есть
 , (2) , (2)
где – есть постоянные коэффициенты, – есть постоянные коэффициенты,
 (j
=1,2,...,р
) – корни характеристического уравнения. (j
=1,2,...,р
) – корни характеристического уравнения.
 (3) (3)
Стационарность ряда (2) имеет место, если корни уравнения (3) имеют модуль меньше единицы. Другими словами, корни должны лежать внутри единичного круга. Считая, что ряд имеет достаточно длинную предысторию, общим решением (2) можно пренебречь вследствие затухания.
Частое решение, как видно из (), есть

Последнее соотношение есть форма представления авторегрессионного процесса в виде общей линейной модели.
Последовательно умножим уравнение (1) на  , возьмем математическое ожидание и разделим на . Получим систему уравнений относительно коэффициентов корреляции : , возьмем математическое ожидание и разделим на . Получим систему уравнений относительно коэффициентов корреляции :
 , k
=1, 2, ..., p
(4) , k
=1, 2, ..., p
(4)
Учитывая, что  , и вводя матричные обозначения , и вводя матричные обозначения
 , ,
запишем (4) в виде
Pa
=
r
(5)
Систему уравнений (5) называют системой Юла-Уокера. Из нее находим, что
a
=
 r
(6) r
(6)
Таким образом, зная первые р автокорреляций временного ряда, можно найти по (3) автокорреляции более высокого порядка, то есть полностью восстановить автокорреляционную функцию (что уже отмечалось при анализе процессов АР(1) и АР(2)).
Поведение автокорреляционной функции зависит от корней характеристического полинома. Обычно коррелограмма процесса АР(р
) состоит из совокупности затухающих синусоид.
Если у процесса АР(2) частная автокорреляция членов ряда, разделенных 2-мя или большим числом членов, равна нулю, то у процесса АР(р
) нулю равны автокорреляции порядка р и выше. Выходит, частная коррелограмма процесса АР(р
) должна равняться нулю, начиная с некоторого момента. Правда, надо заметить, что этот факт имеет место для бесконечного ряда. Для конечных реализаций указать место обрыва коррелограммы часто затруднительно.
Итак, для процесса АР(р
) частная автокорреляционная функция обрывается на лаге р
, тогда как автокорреляционная функция плавно спадает.
10.1.4 Процессы скользящего среднего
Обобщенная линейная модель для процессов скользящего среднего содержит лишь конечное число членов, то есть в ( ):  =0 k
>
q
. =0 k
>
q
.
Модель приобретает вид
 (1) (1)
(В
(1) коэффициенты  переобозначены через переобозначены через .) .)
Соотношение (1) определяет процесс скользящего среднего порядка q
, или сокращенно СС(q
). Условие обратимости ( ) для процесса СС(q
) выполняется, если корни многочлена b
(В
) лежат вне единичного круга.
Найдем дисперсию процесса СС(q
):
 
Все смешанные произведения вида  равны нулю в силу некоррелированности возмущений в разные моменты времени. Для нахождения автокорреляционной функции процесса СС(q
) последовательно умножим (1) на равны нулю в силу некоррелированности возмущений в разные моменты времени. Для нахождения автокорреляционной функции процесса СС(q
) последовательно умножим (1) на  и возьмем математическое ожидание и возьмем математическое ожидание
 (2) (2)
В правой части выражения (2) останутся только те члены, которые отвечают одинаковым временным тактам (см. рис )
    
    (k
=2) (k
=2)
Следовательно, выражение (2) есть
 (3) (3)
поделив (3) на , получим
 (4) (4)
Тот факт, что автокорреляционная функция процесса СС(q) имеет конечную протяженность (q
тактов) – характерная особенность такого процесса. Если  известны, то (4) можно в принципе разрешить относительно параметров известны, то (4) можно в принципе разрешить относительно параметров  . Уравнения (4) нелинейные и в общем случае имеют несколько решений, однако условие обратимости всегда выделяет единственное решение. . Уравнения (4) нелинейные и в общем случае имеют несколько решений, однако условие обратимости всегда выделяет единственное решение.
Как уже отмечалось, обратимые процессы СС можно рассматривать как бесконечные АР- процессы -АР(¥). Следовательно, частная автокорреляцонная функция процесса СС(р
) имеет бесконечную протяженность. Итак, у процесса СС(q
) автокорреляционная функция обрывается на лаге q
, тогда как частная автокорреляционная функция плавно спадает.
10.1.5 Комбинированные процессы авторегрессии - скользящего среднего
Хотя модели АР(р
) и СС(q
) позволяют описывать многие реальные процессы, число оцениваемых параметров может оказываться значительным. Для достижения большей гибкости и экономичности описания при подборе моделей к наблюдаемым временным рядам весьма полезными оказались смешанные модели, содержащие в себе и авторегрессию и скользящее среднее. Эти модели были предложены Боксом и Дженкинсом и получили название модели авторегрессии - скользящего среднего (сокращенно АРСС(р,
q
)):
 (1) (1)
С использованием оператора сдвига В
модель (1) может быть представлена более компактно:
 , ( ) , ( )
где а
(В
)—авторегрессионный оператор порядка р
,
b
(В
)—оператор скользящего среднего порядка q
.
Модель () может быть записаны и так :

Рассмотрим простейший смешанный процесс АРСС(1,1)
Согласно 
 (2) (2)
Из соотношения (2) видно, что модель АРСС(1,1) является частным случаем общей линейной модели ( ) с коэффициентами  (j
>0) (j
>0)
Из (2) легко получить выражение для дисперсии :

Для получения корреляционной функции воспользуемся тем же приемом, что и при анализе моделей авторегрессии. Умножим обе части модельного представления процесса АРСС(1,1)

на  и возьмем математическое ожидание : и возьмем математическое ожидание :

или (с учетом того, что второе слагаемое в правой части равенства равно нулю)

Поделив ковариации на дисперсию получаем выражения для автокорреляции

полученные соотношения показывают, что экспоненциально убывает от начального значения , зависящего от  и и  при этом, если > , то затухание монотонное; при < – затухание колебательное. при этом, если > , то затухание монотонное; при < – затухание колебательное.
Аналогично может быть построена автокорреляционная функция для общей модели АРСС(р,
q
).
Умножим все члены (1) на . Возьмем математическое ожидание и в результате получим следующее разностное уравнение.

Где  - взаимная ковариационная функция между y
и - взаимная ковариационная функция между y
и  . Поскольку возмущения . Поскольку возмущения  в момент t
и значения ряда в прошлые моменты (см(2)) не коррелируют, в момент t
и значения ряда в прошлые моменты (см(2)) не коррелируют,  0 при k>0. 0 при k>0.
Отсюда следует, что для значений  q
+1 автоковариации и автокорреляции удовлетворяют тем же соотношениям, что и в модели АР(р
): q
+1 автоковариации и автокорреляции удовлетворяют тем же соотношениям, что и в модели АР(р
):

В итоге оказывается, что при q
<р
вся автокорреляционная функция будет выражаться совокупностью затухающих экспонент и / или затухающих синусоидальных волн, а при q
>
p
будет q
-
p
значений  , выпадающих из данной схемы. , выпадающих из данной схемы.
10.1.6 Интегрированная модель авторегрессии- скользящего среднего
Модель АРСС допускает обобщение на случай, когда случайный процесс является нестационарным. Ярким примером такого процесса являются «случайные блуждания»:
 (1) (1)
С использованием оператора сдвига модель (1) принимает вид
 (2) (2)
Из (2) видно, что процесс (1) расходящийся, поскольку . Характеристическое уравнение этого процесса имеет корень, равный единице, то есть имеет место пограничный случай, когда корень характеристического уравнения оказался на границе единичной окружности. В то же время, если перейти к первым разностям . Характеристическое уравнение этого процесса имеет корень, равный единице, то есть имеет место пограничный случай, когда корень характеристического уравнения оказался на границе единичной окружности. В то же время, если перейти к первым разностям  , то процесс , то процесс  окажется стационарным. окажется стационарным.
В общем случае полагается, что нестационарный авторегрессионный оператор  в модели АРСС имеет один или несколько корней, равных единице. Иными словами, является нестационарным оператором авторегрессии порядка p
+
d
;
d
корней уравнения =0 равны единице, а остальные р
корней лежат вне единичного круга. Тогда можно записать, что в модели АРСС имеет один или несколько корней, равных единице. Иными словами, является нестационарным оператором авторегрессии порядка p
+
d
;
d
корней уравнения =0 равны единице, а остальные р
корней лежат вне единичного круга. Тогда можно записать, что
 , ,
где a
(B
) – стационарный оператор авторегрессии порядка р
(с корнями вне единичного круга).
Введем оператор разности  , такой что , такой что  =(1-B
) , тогда нестационарный процесс АРСС запишется как =(1-B
) , тогда нестационарный процесс АРСС запишется как
 , (3) , (3)
где b
(B
) – обратимый оператор скользящего среднего (вне его корни лежат вне единичного круга).
Для разности порядка d
, то есть  модель модель

описывает уже стационарный обратимый процесс АРСС(р,
q
).
Для того чтобы от ряда разностей вернуться к исходному ряду требуется оператор s
, обратный :

Этот оператор называют оператором суммирования, поскольку
 . .
Если же исходной является разность порядка d
, то для восстановления исходного ряда понадобится d
- кратная итерация оператора s
,
иначе d
- кратное суммирование (интегрирование). Поэтому процесс (3) принято называть процессом АРИСС, добавляя к АРСС термин интегрированный. Кратко модель (3) записывают как АРИСС(р,
d
,
q
), где р
– порядок авторегрессии, d
– порядок разности, q
– порядок скользящего среднего. Ясно, что при d
=0 модель АРИСС переходит в модель АРСС .
На практике d
обычно не превышает двух, то есть d
.
Модель АРИСС допускает представление, аналогичное общей линейной модели, а так же в виде «чистого » процесса авторегрессии (бесконечного порядка). Рассмотрим, к примеру, процесс АРИСС (1, 1, 1):
 (4) (4)
Из (4) следует, что

Отсюда
 (5) (5)
В выражении (5) коэффициенты, начиная с третьего, вычисляются по формуле  . .
Представление (5) интересно тем, что веса, начиная с третьего, убывают по экспоненциальному закону. Поэтому, хотя формально зависит от всех прошлых значений, однако реальный вклад в текущее значение внесут несколько «недавних» значений ряда. Поэтому уравнение (5) более всего подходит для прогнозирования.
Как уже отмечалось, процессы АРИСС допускают представление в виде обобщенной линейной модели, то есть

Естественно искать будущее (прогнозное) значение ряда в момент  в виде в виде

Ожидаемое значение  , которое мы будем обозначать как , которое мы будем обозначать как 
=
Первая сумма в правой части последнего соотношения содержат лишь будущие возмущения (прогноз делается в момент t
, когда известны прошлые значения и ряда  и возмущений и возмущений ) и для них математическое ожидание равно 0 по определению. Что же касается второго слагаемого, то возмущения здесь уже состоялись, так что ) и для них математическое ожидание равно 0 по определению. Что же касается второго слагаемого, то возмущения здесь уже состоялись, так что

Таким образом
= (1) (1)
Ошибка прогноза, представляющая расхождение между прогнозным значением и его ожиданием есть
 = =
Дисперсия ошибки отсюда есть
 (2) (2)
Прогнозирование по соотношению (1) в принципе возможно, однако затруднительно поскольку требует знания всех прошлых возмущений. К тому же для стационарных рядов скорость затухания часто оказывается недостаточной, не говоря уже о нестационарных процессах, для которых ряды расходятся.
Поскольку модель АРИСС допускает и другие представления, рассмотрим возможности их использования для прогнозирования. Пусть модель задана непосредственно разностным уравнением
 (3) (3)
По известным значениям ряда (результатам наблюдений)  и оцененным значениям возмущений и оцененным значениям возмущений  , опираясь на рекуррентную формулу (3) можно оценить ожидаемое значение ряда в момент t
+1: , опираясь на рекуррентную формулу (3) можно оценить ожидаемое значение ряда в момент t
+1:

- , (4) , (4)
При прогнозировании на два такта следует вновь воспользоваться рекуррентным соотношением (3), где в качестве наблюденного значения ряда в момент t
+1 следует взять предсказанную по (4) величину  , то есть , то есть  и так далее. и так далее.
Наконец, возможно прогнозирование опираясь на представление процесса АРИСС в виде авторегрессии (). Как уже отмечалось, несмотря на то что порядок авторегрессии бесконечен, весовые коэффициенты в представлении ряда убывают довольно быстро, поэтому для вычисления прогноза достаточно умеренное число прошлых значений ряда.
Дисперсия ошибки прогноза на  шагов вперед есть шагов вперед есть

и согласно выражению (2) дается выражением
 
В предположении, что случайные возмущения являются гаусовским белым шумом, то есть  можно рассматривать доверительный интервал для прогнозного значения ряда стандартным образом. можно рассматривать доверительный интервал для прогнозного значения ряда стандартным образом.
Описанные выше теоретические схемы строились в предположении, что временной ряд имеет бесконечную предысторию, тогда как реально исследователю доступен ограниченный объем наблюдений. Модель приходится подбирать экспериментально, подгоняя ее к имеющимся в распоряжении данным. Поэтому с позиций теоретического применения теории анализа временных рядов определяющее значение имеют вопросы корректной спецификации модели АРИСС(p
,
d
,
q
) (ее идентификации) и последующего оценивания ее параметров.
На этапе идентификации наблюденные данные используются для определения подходящего класса моделей и делаются предварительные оценки ее параметров, то есть строится пробная модель. Затем пробная модель подгоняется к данным более тщательно; при этом первичные оценки, полученные на этапе идентификации выступают в качестве начальных значений в итеративных алгоритмах оценивания параметров. И наконец, на третьем этапе полученная модель подвергается диагностической проверке для выявления возможной неадекватности модели и выработки подходящих изменений в ней.Рассмотрим перечисленные этапы подробнее.
Идентификация модели
Цель идентификации – получить некоторое представление о величинах p
,
d
, q
и о параметрах модели. Идентификация модели распадается на две стадии
1. Определение порядка разности d
исходного ряда .
2. Идентификация модели АРСС для ряда разностей  . .
Основной инструмент, используемый на обеих стадиях – автокорреляционная и частная автокорреляционная функции.
В теоретической части мы видели, что у стационарных моделей автокоррелящии спадают с ростом k
весьма быстро (по корреляционному закону). Если же автокорреляционная функция затухает медленно и почти линейно, то это свидетельствует о нестационарности процесса, однако, возможно, его первая разность стационарно.
Построив коррелограмму для ряда разностей, вновь повторяют анализ и так далее. Считается, что порядок разности d
, обеспечивающий стационарность, достигнут тогда, когда автокорреляционная функция процесса падает довольно быстро. На практике  и достаточно просмотреть порядка 15-20 первых значений автокорреляции исходного ряда, его первые и вторые разности. и достаточно просмотреть порядка 15-20 первых значений автокорреляции исходного ряда, его первые и вторые разности.
После того как будет получен стационарный ряд разностей, порядка d, изучают общий вид автокорреляционной и частной автокорреляционной функций этих разностей. Опираясь на теоретические свойства этих функций можно выбрать значения p
и q
для АР и СС операторов. Далее при выбранных p
и q
строятся начальные оценки параметров авторегрессии  и скользящего среднего b
=(). Для авторегрессионных процессов используются уравнения Юла-Уокера, где теоретические автокорреляции заменены на их выборочные оценки. Для процессов скользящего среднего порядка q
только первые q
автокорреляций отличны от нуля и могут быть выражены через параметры (см. ). Заменяя и скользящего среднего b
=(). Для авторегрессионных процессов используются уравнения Юла-Уокера, где теоретические автокорреляции заменены на их выборочные оценки. Для процессов скользящего среднего порядка q
только первые q
автокорреляций отличны от нуля и могут быть выражены через параметры (см. ). Заменяя  их выборочными оценками их выборочными оценками  и решая получающиеся уравнения относительно , получим оценку и решая получающиеся уравнения относительно , получим оценку  . Эти предварительные оценки можно использовать как начальные значения для получения на следующих шагах более эффективных оценок. . Эти предварительные оценки можно использовать как начальные значения для получения на следующих шагах более эффективных оценок.
Для смешанных процессов АРСС процедура оценивания усложняется . Так для рассмотренного в п. процесса АРСС(1,1) параметры  и , точнее их оценки, получаются из ( ) с заменой и , точнее их оценки, получаются из ( ) с заменой  и и  их выборочными оценками. их выборочными оценками.
В общем случае вычисление начальных оценок процесса АРСС(p
,
q
) представляет многостадийную процедуру и здесь не рассматривается. Отметим только, что для практики особый интерес имеют АР и СС процессы 1-го и 2-го порядков и простейший смешанный процесс АРСС(1,1).
В заключение заметим, что оценки автокорреляций, на основе которых строятся процедуры идентификации могут иметь большие дисперсии (особенно в условиях недостаточного объема выборки – несколько десятков наблюдений) и быть сильно коррелированны. Поэтому говорить о строгом соответствии теоретической и эмпирической автокорреляционных функций не приходится. Это приводит к затруднениям при выборе p
,
d
,
q
,
поэтому для дальнейшего исследования могут быть выбраны несколько моделей.
линейный ряд система временной ряд
Размещено на http://www.
|