Введение
В данной работе мы рассмотрим асинхронный микродвигатель 4АА50В2 (4АА50В4). Изучим его конструкцию и принцип действия, а также области его применения.
Общие сведения об асинхронных машинах
Асинхронной машиной называется двухобмоточная электрическая машина переменного тока, у которой только одна обмотка (первичная) получает питание от электрической сети с постоянной частотой ω1
, а вторая обмотка (вторичная) замыкается накоротко или на электрические сопротивления. Токи во вторичной обмотке появляются в результате электромагнитной индукции. Их частота ω2
является функцией угловой скорости ротора Ω, которая в свою очередь зависит от вращающего момента, приложенного к валу.
К микродвигателям относят машины мощностью до 600 Вт. Асинхронные микродвигатели общего назначения выпускаются трехфазные, однофазные и универсальные, способные работать как в трехфазном, так и в однофазном режимах (серия УАД).
Асинхронные микродвигатели по устройству отличаются от обычных двигателей схемой обмотки и конструкцией ротора. Они имеют короткозамкнутые роторы с обмоткой в виде беличьей клетки.
Асинхронные микродвигатели чаще всего питаются от однофазной сети. Обмотки, питаемые однофазным током, могут создавать только пульсирующие поля. Асинхронный двигатель является наиболее распространенным типом двигателя переменного тока.
Выпускаемые заводами асинхронные микродвигатели предназначаются для работы в определенных условиях с определенными техническими данными, называемыми номинальными. К числу номинальных данных асинхронных микродвигателей, которые указываются в заводской табличке машины, укрепленной на ее корпусе, относятся:
механическая мощность, развиваемая двигателем, Рн
= P2н
;
частота сети f1
;
линейное напряжение статора U1лн
линейный ток статора I1лн
;
частота вращения ротора nн
;
коэффициент мощности cosφ1
н
;
коэффициент полезного действия ηн
.
1. Конструкция асинхронного микродвигателя 4А
Асинхронный микродвигатель имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод; все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения (вращения) магнитного потока обмотки возбуждения, поэтому его изготавливают шихтованным (набранным из пластин) из электротехнической стали для обеспечения минимальных магнитных потерь.
Двигатели с высотами оси вращения 280-355 мм имеют дополнительное охлаждение ротора наружным воздухом, проходящим через окна в подшипниковых щитах, по трубкам и вентиляционным каналам ротора. Требуемая степень защиты обеспечивается вращающимися уплотнениями.
асинхронный микродвигатель электрическая машина
 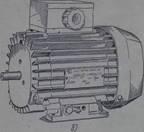
Рис. Конструкция (а) и внешний вид (б) асинхронного микродвигателя
4АА50В2(4АА50В4):
1-сердечник статора, 2-
обмотка статора, 3- ротор,
4,6- подшипниковые щиты,
5- вал, 7- вентилятор
Станина АД.
Двигатели со степенью защиты IP44 имеют прилитые лапы и приливы для размещения и крепления вводного устройства. Асинхронные двигатели имеют станины из алюминиевого сплава или чугуна.
Станины АД со степенью защиты IP23 имеют две конструкции. У АД станины литые чугунные с внутренними ребрами, на которых крепится сердечник статора.
Для каждой высоты оси вращения предусмотрено не более двух станин с лапами, отличающихся только длиной, и соответственно двух станин без лап. Подшипниковые щиты АД со степенью защиты IP44 выполнены из чугуна. Подшипниковые щиты АД со степенью защиты IP23 имеют вид ступицы и обода, соединенных шестью ребрами-спицами.
Двигатели обоих исполнений по степени защиты имеют подшипниковые щиты с внешними замковыми поверхностями и окнами на торцевой поверхности для прохода охлаждающего воздуха.
Конструкция активных частей.
Статор - неподвижная часть электродвигателя, чаще всего - внешняя. В зависимости от типа двигателя, может создавать неподвижное магнитное поле и состоять из постоянных магнитов и/или электромагнитов, либо генерировать вращающееся магнитное поле (и состоять из обмоток, питаемых переменным током).
Ротор - подвижная часть электродвигателя, чаще всего располагаемая внутри статора. Может состоять из: постоянных магнитов, обмоток на сердечнике (подключаемых через щёточно-коллекторный узел), короткозамкнутой обмотки ("беличье колесо" или "беличья клетка").
Сердечники статора и ротора собраны из штампованных листов электротехнической стали толщиной 0,5 мм.
Сердечники статоров АД скрепляют сваркой или стальными скобами. Сердечники статоров АД собираются непосредственно в станине, опрессовываются и закрепляются кольцевыми шпонками.
Двигатели с высотами оси вращения 50—160 мм, за исключением двухполюсных с высотой оси вращения 160 мм, имеют однослойные всыпные статорные обмотки. Двигатели с высотами оси вращения 160— 250 мм и двухполюсные с высотой оси вращения 160 мм имеют одно-двухслойные или двухслойные всыпные обмотки. В АД применены обмотки из подразделенных катушек, намотанных прямоугольным проводом.
Обмотки короткозамкнутых роторов выполняют литыми из алюминия или его сплавов.
Конструкции подшипниковых узлов.
В АД применены подшипники качения средней серии: с высотами оси вращения до 160 мм — оба подшипника шариковые, с высотами оси вращения свыше 160 мм — роликовый со стороны привода и шариковый с противоположной стороны. У АД фланцевого исполнения с высотами оси вращения 160 — 250 мм оба подшипника шариковые.
Вводное устройство.
Для подключения АД к сети служит вводное устройство, расположенное на верху станины в АД. Устройство допускает присоединение к АД гибкого металлического рукава и кабелей с медными или алюминиевыми жилами, с резиновой или пластмассовой оболочкой. Двигатели мощностью 30 кВт и выше при напряжении 220 В, а также АД с высотами оси вращения 50 — 53 мм допускают присоединение кабелей только с медными жилами. Ввод кабеля производят через один или два штуцера, а также через удлинитель под сухую разделку или заливку кабельной массой.
Конструкция вводного устройства позволяет разворачивать его корпус с фиксацией на 180°, при этом панель вместе с закрепленными на ней выводными концами обмотки статора остается неподвижной. Внутри вводного устройства предусмотрен заземляющий болт для подключения заземления или оболочки кабеля.
2. Принцип действия асинхронного микродвигателя
Принцип действия асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле, угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки.
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим магнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s=(ω1-ω2)/ω1.
Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуцируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключения (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
3. Области применения асинхронного микродвигателя
По условиям применения различают АД общего (промышленного и бытового) и специализированного назначения.
АД используют для привода мелких станков, компрессоров насосов, аппаратов магнитной записи (магнитофоны, проигрыватели, видеомагнитофоны, диктофоны, электрофоны и др.), счетных машин, оптико-механических приборов, кино- и диапроекторов, бытовых приборов (пишущие машинки, мусородробилки, электрокомпрессоры, ножеточки), светолучевых осциллографов, приборов вентиляторной нагрузки (бытовые вентиляторы, фены, увлажнители, потолочные вентиляторы, рукосушители, вентиляторы торговых холодильников, воздухонагнетатели), стиральных (активатор,центрифуга) и посудомоечных машин, домашних холодильников, мясорубок, морожениц, электроманикюрниц, машин для стрижки овец и дойки коров, медицинского оборудования и др.
АД бытового назначения составляют 70% от их общего количества.
Заключение
В ходе проделанной работы мы выяснили, что асинхронные микродвигатели имеют огромное значение в нашей жизни. Они широко применимы во всех областях промышленности и в быту. Они облегчают нам работу, дают возможность обеспечить более длительное хранение пищи и её более качественное приготовление. Асинхронные двигатели также экономят наше бесценное время. На сегодняшний день невозможно представить нашу жизнь без них.
Перечень используемой литературы
1. Е.М. Лопухина, Проектирование асинхронных микродвигателей с применением ЭВМ. Москва “Высшая школа”, 1980.
2. Е.М. Лопухина Асинхронные исполнительные микродвигатели для систем автоматики. Ленинград “Энергия”, 1978.
3. В.В. Хрущёв. Электрические микромашины автоматических устройств. Ленинград “Энергия”, 1976.
|