Кинематический анализ механизмов
Содержание
Введение
1. Основные задачи и методы кинематического анализа
2. Построение положений звеньев механизма
3. Функция положения механизма
4. Основные уравнения для определения скоростей и ускорений
5. Кинематические диаграммы
5.1 Построение диаграммы перемещений
Литература
Тема контрольной работы "Кинематический анализ механизмов" по дисциплине "Теория механизмов и машин".
Цель работы: формирование знаний кинематического анализа механизмов.
Задачи выполнения работы: ознакомление с методами кинематического анализа механизмов.
Основные вопросы темы:
1. Основные задачи и методы кинематического анализа;
2. Построение положений звеньев механизма;
3. Функция положения механизма;
4. Основные уравнения для определения скоростей и ускорений;
5. Кинематические диаграммы.
Основной задачей кинематики механизмов является изучение движения звеньев механизмов вне зависимости от сил, действующих на эти звенья.
При кинематическом исследовании механизмов рассматриваются следующие основные вопросы:
1) построение планов скоростей;
2) построение траектории любой точки механизма;
3) определение скоростей и ускорений любой точки механизма, определение угловых скоростей и ускорений любого звена механизма, определение радиуса кривизны в любой точке траектории и др.
Кинематическое исследование можно вести как с применением графических методов, так и аналитическим путем. Графические методы исследования, давая достаточную для инженерной практики точность, обычно оказываются проще и нагляднее аналитических. Однако, когда ведется систематическое углубленное исследование какого-либо определенного типа механизма, более удобным оказывается аналитический метод.
При графических построениях на чертеже приходится изображать не только длины звеньев, но и скорости и ускорения отдельных точек, а также и другие величины. В этих условиях удобно использовать масштабный коэффициент, которым называют отношение действительной величины к изображению:
 - масштабный коэффициент; - масштабный коэффициент;
 - масштабный коэффициент; - масштабный коэффициент;
 - масштабный коэффициент - масштабный коэффициент
Взаимное расположение звеньев движущегося механизма все время меняется, но в каждый данный момент времени расположение звеньев является вполне определенным. Графическое изображение взаимного расположения звеньев, соответствующее выбранному моменту времени, называется планом механизма. Ряд последовательных планов механизма, построенных для моментов времени, следующих друг за другом, называется планом положений и позволяет наглядно проследить за движением механизма.
Построение плана положений механизма начинают с изображения того звена, положение которого задано для данного момента времени.
Кривошипно-ползунный механизм
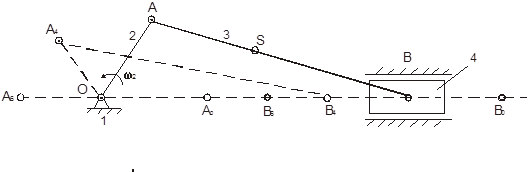
Рис.1
Из центра О - оси вращения кривошипа ОА радиусами  и и  на оси X - Xдвижения ползуна отмечаем В0
- правое В6
- левое крайние ползуна В. Прямые ОА0
В0
и ОА6
В6
- положения механизма, соответствующие крайним положениям В0
и В6
ползуна. Траекторию пальца А кривошипа от точки А0
делим на 12 равных частей и из полученных точек А1
, А2
, А3
… А11
радиусами АВ= на оси X - Xдвижения ползуна отмечаем В0
- правое В6
- левое крайние ползуна В. Прямые ОА0
В0
и ОА6
В6
- положения механизма, соответствующие крайним положениям В0
и В6
ползуна. Траекторию пальца А кривошипа от точки А0
делим на 12 равных частей и из полученных точек А1
, А2
, А3
… А11
радиусами АВ= =… отмечаем положения В1
, В2
, В3
…В11
ползуна на линии В0
В6
. Соединив точки А1
, А2
, А3
… А11
с центром О и соответствующими точками В1
, В2
, В3
…В11
, получим планы механизма. Кривая, последовательно соединяющая центры S0
, S1
, S2
…S11
шатуна в различных его положениях, будет шатунной кривой. =… отмечаем положения В1
, В2
, В3
…В11
ползуна на линии В0
В6
. Соединив точки А1
, А2
, А3
… А11
с центром О и соответствующими точками В1
, В2
, В3
…В11
, получим планы механизма. Кривая, последовательно соединяющая центры S0
, S1
, S2
…S11
шатуна в различных его положениях, будет шатунной кривой.
Функцией положения механизма называется зависимость координаты выходного звена от обобщенных координат механизма.
Перемещения, скорости и ускорения звеньев и точек механизма является функциями перемещений, скоростей и ускорений звеньев механизма, принятых за ведущие. Число ведущих звеньев механизма должно быть равно числу степеней подвижности механизма или, что то же самое, числу обобщенных координат механизма.
Рассмотрим, в какой форме могут быть заданы законы ведущих звеньев. Эти законы называют функциями перемещений, скоростей и ускорений.
Функция перемещений может быть задана в аналитической форме в виде соответствующей функции, связывающей перемещение ведущего звена со временем (рис.2).
 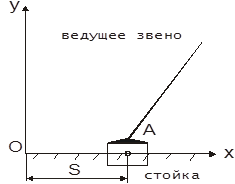
Рис.2
Если ведущее звено входит во вращательную пару со стойкой, то задается функция φ=φ (t), где: φ - угол поворота ведущего звена относительно неподвижной системы координат ХОY, связанной со стойкой, а t - время.
Если ведущее звено входит в поступательную пару, то задается функция s=s (t), где s - перемещение произвольно выбранной точки А ведущего звена относительно неподвижной системы координат, связанной со стойкой, а t - время.
Функции φ=φ (t) и s=s (t) могут быть также заданы графически в виде кривых, где по осям ординат отложены углы поворота φ или перемещения sв некоторых выбранных масштабах  и и  , а по осям абсцисс время tв выбранном масштабе , а по осям абсцисс время tв выбранном масштабе  (рис.3). (рис.3).
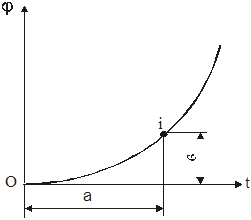
Рис.3
φ0
= 0; φi
- φ0
= · в;
Соответственно время ti
, за которое ведущее звено повернулось на угол φi
равно:
ti
- t0
= ·a
;
Если закон движения ведущего звена задан в виде функций скоростей ω=ω (t) или v=v (t), то переход от функций скоростей к функциям перемещений может быть осуществлен путем вычисления интегралов:
кинематический анализ механизм ускорение
 и и  ; ;
где: φ0
, s0
, t0
- угол, перемещение и время, соответствующие начальному положению ведущего звена.
Если закон движения ведущего звена задан в виде функций ускорений ε=ε (t) и ω=ω (t), то переход к функциям скоростей осуществляется путем вычисления интегралов:
 и и 
где: ω0
, v0
, t0
- угловая скорость, линейная скорость и время, соответствующие начальному положению ведущего звена.
Связь между скоростями и ускорениями общих точек звеньев кинематической пары зависит от пары.
Рассмотрим два случая составления векторных уравнений скоростей и ускорений:
а) две точки принадлежат одному звену и удалены друг от друга на расстояние l (
рис.4).
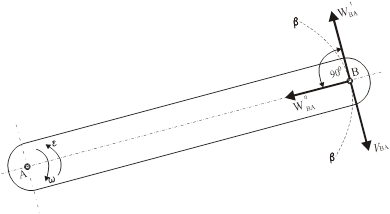
Рис.4
Из теоретической механики известно, что скорость любой точки абсолютно твердого тела можно представить как геометрическую сумму скоростей переносного и относительного движений.
Переносным движением для рассматриваемого звена будем считать поступательное движение со скоростью точки А, а относительным - вращательное движение звена вокруг точки А. Векторное уравнение для скорости точки В:
  ; ;
При вращении звена вокруг точки А точка В движется по окружности ββ
, описанной из точки А. Поэтому скорость V
BA
направлена по касательной к дуге ββ
, т.е. перпендикулярна линии АВ.
Величина скорости VBA
=ω·АВ или VBA
=ω· . .
По направлению V
BA
можно найти направление ω и наоборот.
Т.к. переносное движение выбрано поступательным, то ускорение точки В можно составить из 2-х ускорений: ускорения точки А и ускорения точки В при вращении звена вокруг точки А.
При движении точки В по окружности ββ
ускорение WBA
складывается из 2-х ускорений: нормального  , направленного к центру вращения, и тангенциального , направленного к центру вращения, и тангенциального  , направленного по касательной к дуге ββ
, т.е. перпендикулярно линии АВ. Векторное уравнение для ускорения точки В: , направленного по касательной к дуге ββ
, т.е. перпендикулярно линии АВ. Векторное уравнение для ускорения точки В:
 ; ;
Величины ускорений и определяем по формулам:
=·ω2
= ; ; 
где: ε - угловое ускорение;
б) две точки принадлежат двум звеньям, образующим поступательную пару и в данный момент времени совпадают (рис.5).

Рис.5
Точка А принадлежит звену 1, точка В - звену 2. В данный момент времени точки А и В совпадают (точка В лежит над точкой А). Звенья 1 и 2 образуют поступательную пару с направляющей Н12
.
Скорость точки В складывается из 2-х скоростей - переносной и относительной. Переносным движением здесь является движение звена 1, поэтому скорость точки А - V
A
будет переносной. Относительная скорость точки В равна скорости движения звена 2 относительно звена 1. При движении звена 2 относительно звена 1 точка В движется по прямой линии ββ
, параллельной направляющей Н12
. Поэтому относительная скорость V
ВА
параллельна Н12
.
Ускорение точки В, когда переносное движение не является поступательным, складывается из 3-х ускорений: переносного, т.е. ускорения точки А, относительного и поворотного, или Кориолисова. В относительном движении точка В движется по линии ββ
, поэтому в этом движении точка В имеет только тангенциальное ускорение, направленное по этой линии, т.е. параллельно направляющей Н12
. Обозначим это ускорение через . Поворотное (Кориолисово) ускорение обозначим через  . .
Векторные уравнения для скорости и ускорения точки В будут иметь вид:
Так как звенья 1 и 2 образуют поступательную пару, то они не имеют относительного вращения. Поэтому эти звенья обладают одинаковыми угловыми скоростями и угловыми ускорениями, т.е.: ω2
=ω1
и ε2
=ε1
, где ω1 -
угловая скорость переносного движения (вращения звена 1).
Вектор  направлен в ту сторону, в которую окажется направленным вектор направлен в ту сторону, в которую окажется направленным вектор  , если повернуть его на 900
в направлении угловой скорости ω1
. Величина его определяется по формуле: , если повернуть его на 900
в направлении угловой скорости ω1
. Величина его определяется по формуле:

Определим скорость и ускорение ползуна кривошипно-ползунного механизма.
Дан план механизма, размеры ℓОА
, ℓАВ
, ω2
, ε2
.
Найдем скорость и ускорение звена 4 (точки В) и угловые скорость и ускорение звена 3 (шатуна).

Рис.6
Зная ω2
, находим VА
=ℓОА
·ω2
. Скорость VА
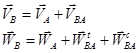
изобразим на плане скоростей в виде отрезка "Pа
", перпендикулярного ОА (рис.7). Поршень (звено 4) движется поступательно, поэтому все его точки имеют ту же скорость и то же ускорение, что и точка В.
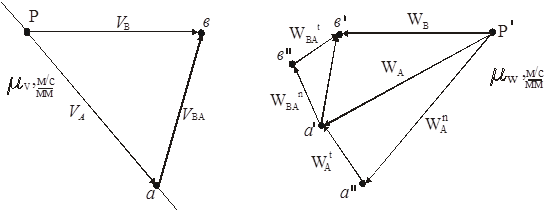
Рис.7 Рис.8
Однако точка В принадлежит не только звену 4, но и звену 3. Точно также точка А есть общая точка для звеньев 2 и 3. Таким образом, на звене 3 имеются две точки А и В, удаленные друг от друга на расстояние ℓАВ
. Поэтому скорость точки В:
 где: где:  ║ ║ ; ;
В соответствии с этим уравнением строим план скоростей. Проводим через точку а
линию, перпендикулярную к АВ, а через точку Р - линию перпендикулярную Н41
. В точке пересечения ставим в
. Отрезок Рв
изображает скорость точки В, а отрезок ав
- скорость точки В относительно А (V
ВА
). Угловую скорость звена 3 находим по формуле:

Перенеся вектор в точку В, находим направление ω3
(против часовой стрелки).
Ускорение точки А:

где:  и и  ; ;
Отложив от полюса  (рис.8) ускорение (рис.8) ускорение  и и  в виде отрезков в виде отрезков  и и  , находим полное ускорение точки А (отрезок , находим полное ускорение точки А (отрезок  ). ).
Ускорение точки В:

где:  ; ;  ║ ║  и и  АВ; АВ;
Ускорение направлено от точки В к точке А. Отложив от точки а′
(
на плане ускорений) отрезок а′
в′′
, соответствующий , проводим через точку в′′
линию, перпендикулярную АВ. Через полюс Р′
проводим линию, параллельную Н41
. Эти линии пересекаются в точке в′
, отрезок Р′
в′
представляет искомое ускорение точки В (WB
), а отрезок в′′
в′
- ускорение . Из сопоставления направлений WB
и VB
заключаем, что звено 4 в данный момент движется замедленно.
Угловое ускорение звена 3 находим по формуле:  . .
Перенос вектора  в точку В показывает, что ε3,
как и ω3
, направлено против часовой стрелки. в точку В показывает, что ε3,
как и ω3
, направлено против часовой стрелки.
В уравнениях вектор, известный по величине и направлению подчеркиваем двумя линиями, а вектор, известный только по направлению - одной линией.
Кинематическая диаграмма представляет собой графическое изображение одного из кинематических параметров (перемещений, скорости и ускорения) точки либо звена исследуемого механизма в функции времени, угла поворота или перемещения ведущего звена этого механизма, т.е. в функции обобщенной координаты. Кинематические диаграммы дают полную кинематическую характеристику механизма.
Построим кинематические диаграммы кривошипно-ползунного механизма.
Для перемещений SB
, скоростей VB
и ускорений WВ
точки В, как перемещающейся прямолинейно, удобно строить кинематические диаграммы в виде зависимостей этих величин от времени tили обобщенной координаты
φ2
, т.е. строить графическое изображение зависимостей:
SB
=SB
(t), VB
=VB
(t), WB
=WB
(t) или:
SB
=SB
(φ2
), VB
=VB
(φ2
), WB
=WB
(φ2
)
если угол φ2
поворота звена 2 выбран в качестве обобщенной координаты.
Если исследованию подлежат угловые перемещения φ3
, угловые скорости ω3
и угловые ускорения ε3
шатуна 3, то можно построить графическое изображение зависимостей:
φ3
=φ3
(t), ω3
=ω3
(t), ε3
=ε3
(t)
φ3
=φ3
(φ2
), ω3
=ω3
(φ2
), ε3
=ε3
(φ2
)
Кривошип ОА вращается с постоянной угловой скоростью ω2
.
1) Вычерчиваем схему механизма в масштабе μе в нескольких, например, двенадцати положениях, соответствующих последовательным поворотам кривошипа ОА на 300
(рис.9). За начальное положение кривошипа принимаем ОА0
, при котором ползун В занимает крайнее правое положение В0
;
в нескольких, например, двенадцати положениях, соответствующих последовательным поворотам кривошипа ОА на 300
(рис.9). За начальное положение кривошипа принимаем ОА0
, при котором ползун В занимает крайнее правое положение В0
;
2) строим оси координат SB
-t (рис.10а) и на оси абсцисс откладываем отрезок ℓ в мм, изображающий время одного полного оборота кривошипа в масштабе:  ; где: ; где:  рад/мм, рад/мм,  ; ;
Отрезок ℓ делим на 12 равных частей и в соответствующих точках 1, 2, 3… по оси ординат откладываем расстояния SB
1
, SB
2
… пройденные точкой В от ее крайнего правого положения В0
.
До крайнего левого положения В6
расстояния возрастают, а начиная с положения В6
, они будут уменьшаться; когда кривошип придет в начальное положение А0
, ордината кривой (SB
-t) будет равна нулю.
3) соединяем последовательно плавной линией полученные точки 0, 1΄
, 2΄
, 3΄
, …. Полученная кривая будет диаграммой расстояний точки В.
Если же по оси абсцисс откладывать углы поворота кривошипа φ, то данная кривая представит функциональную зависимость:

Диаграммы скоростей и ускорений могут быть построены с использованием планов скоростей и ускорений и методов графического дифференцирования:
 . .
Метод графического дифференцирования:
1) под диаграммой (SB
-t) строим оси координат O1
VB
, O1
t (рис.2.10б) и на продолжении оси O1
tвлево откладываем отрезок O1
Р=Н1
мм (произвольно, чтобы дифференциальная кривая разместилась на отведенном для нее месте чертежа);
2) из точки "Р" проводим лучи Р1
, Р2
, Р3
… параллельно хордам кривой (SB
-t) на участках 01΄; 1΄2΄; 2΄3΄….
Эти лучи отсекут на оси O1
В отрезки 01
1; 01
2; 01
3…, пропорциональные средней скорости Vc
на соответствующем участке диаграммы;
3) отложим эти отрезки на средних ординатах соответствующих участков;
4) соединим ряд полученных точек I, II, III…плавной кривой; эта кривая будет диаграммой скорости (V0
-t).
Имея диаграмму скоростей, аналогично строим диаграмму ускорений.
При построении диаграмм (V0
-t) и (WB
-t) данным методом нельзя получить те участки этих диаграмм, которые соответствуют половине крайних участков оси абсцисс. Чтобы закончить построение диаграмм, нужно дополнительно построить средние значения VВ
и  для одного-двух участков следующего цикла. для одного-двух участков следующего цикла.
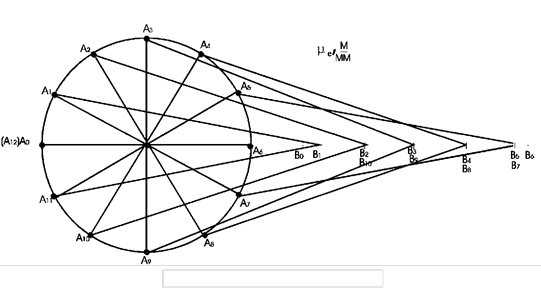
Рис.9 План положений скоростей
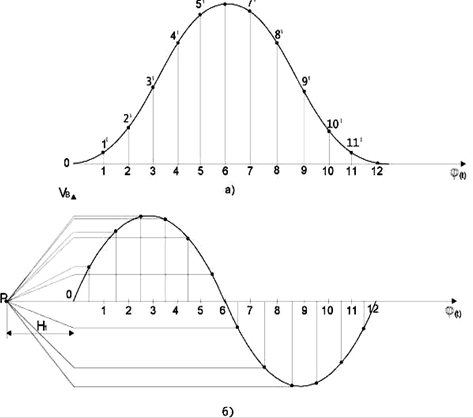
Рис.10 Кинематические диаграммыМасштаб диаграмм остается таким же, как и раньше.
Масштабы по осям ординат определяются по формулам:
для диаграммы скоростей:  ; ;
для диаграммы ускорений:  , ,
Метод построения диаграмм - прост и нагляден, но имеет следующие недостатки:
1) неточность, особенно при дифференцировании кривых с большой кривизной;
2) невозможность полностью исследовать криволинейное движение, т.к. дифференцированием кривой скоростей получаем диаграммы изменения только тангенциальных ускорений;
3) диаграммы дают лишь численные значения векторов, направление которых можно установить лишь после некоторых дополнительных построений.
Метод планов скоростей и ускорений не имеет упомянутых недостатков, поэтому его широко применяют при исследовании различных механизмов.
1. Артоболевский И.И. Теория механизмов и машин. М, 1975, с.103-182.
2. Кореняко А.С. и др. Курсовое проектирование по теории механизмов и машин. Киев, 1970, с.82-102.
|