Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
ГОУ ВПО «Уральский государственный технический университет – УПИ»
Кафедра электрических машин
КУРСОВОЙ ПРОЕКТ
Двигатель синхронный вертикальный
ВДС 2–325-24 мощностью 4000 кВт
Руководитель, ассистент
И.Е. Родионов
Екатеринбург 2008
Задание на проектирование
Рассчитать и спроектировать электромагнитное ядро ВДС 2-325-24 со следующими данными:
Исходные данные
Номинальная мощность, кВт Р н
=4000
Номинальная частота напряжения сети, Гц fн
=50
Номинальный коэффициент мощности (опережающий) cosf н
=0.9
Внешний диаметр статора, м Dа
=3.25
Номинальная частота вращения ротора, об/мин nн
=250
Номинальное линейное напряжение, кВ Uн
=6
Схема обмотки статора: звезда
Изоляция обмотки статора: термореактивная
Возбудитель: статический, тиристорный
Технические требования
Кратность пускового момента М п
/М н
³0.7
Кратность максимального момента М m
/М н
³2.1
Кратность входного момента М вх
/М н
³1.2
Кратность пускового тока Iп
/I н
£5,5
Реферат
двигатель синхронный электромагнитный ядро
В курсовом проекте рассмотрен и выполнен расчет электромагнитного ядра явнополюсного синхронного вертикального двигателя типа ВДС 2-325-24 мощностью 4000кВт.
В главе 1 описаны назначение, принцип действия, основные характеристики и элементы конструкции синхронного вертикального двигателя, область применения.
Задача синтеза осуществляется в два этапа.
На первом этапе в ходе ручного расчета получаем первоначальный вариант параметров двигателя, который приводится в главе 2. Ручной расчет был выполнен с помощью программы MathCAD.
На втором этапе, с помощью ЭВМ и полученных данных в ручном расчете, находим оптимальный вариант параметров двигателя, который приводится в главе 3 данной работы. Оптимизация параметров двигателя была произведена с помощью программы «OPTCD».
Задачей проектирования является синтез электромагнитного ядра и определение таких его параметров, при которых двигатель удовлетворял бы требованиям ГОСТа и технического задания. При такой постановке задачи мы имеем большое количество вариантов двигателя. Оценка вариантов и выбор лучшего двигателя производится по ряду эксплутационных показателей, которые рассматриваются в качестве критериев оптимальности.
Содержание
Техническое задание
Реферат
Содержание
Введение
1. Описание конструкции синхронного двигателя
1.1 Общие сведения
1.2 Основные конструкционные особенности
2. Расчет электромагнитного ядра явнополюсного синхронного двигателя
2.1 Расчет номинальных величин
2.2 Расчет сердечника статора
2.3 Расчет обмотки статора
2.4 Коррекция главных размеров статора по уровню индукции в воздушном зазоре, зубцах и спинке статора
2.5 Выбор величины воздушного зазора
2.6 Расчет полюса и демпферной обмотки
2.7 Расчет магнитной цепи
2.8 Расчет перегрузочной способности
2.9 Расчет обмотки возбуждения
3. Оптимизация электромагнитного ядра на ЭВМ
3.1 Поиск приемлемого варианта
3.2 Оптимизация ядра по минимуму приведенной стоимости
3.3 Оптимизация по минимуму резервов
3.4 Выбор оптимального варианта
Заключение
Библиографический список
Приложение
Введение
В настоящее время широкое распространение получили крупные вертикальные электродвигатели типа ВДС 2-325-24мощностью 4000 киловатт и частотой вращения до 250 оборотов в минуту. В энергетике их применяют качестве генераторов на элктростанциях. В промышленных установках синхронные двигатели также находят большое применение.
Синхронная машина данного типа – это электрическая машина переменного тока, частота вращения ротора которой n находится в строгом соответствии с частотой сети f1
. В соответствии с этим запишем аналитическое выражение:
 , ,
где р - число пар полюсов
Синхронной машиной называется электрическая машина переменного тока, у которой частота вращения ротора n находится в строгом соответствии с частотой сети.
Синхронные двигатели – это бесколлекторные машины переменного тока. По своему устройству они отличаются от асинхронных машин лишь конструкцией ротора, который может быть явнополюсным или неявнополюсным. Синхронные машины отличаются синхронной частотой вращения ротора (n1
=n2
=const) при любой нагрузке, а также возможностью регулирования коэффициента мощности, устанавливая такое его значение, при котором работа синхронной машины становится наиболее экономичной.
В настоящее время широкое распространение получили вертикальные электродвигатели переменного тока мощностью от нескольких десятков ватт до десятков мегаватт, а частотой вращения от нескольких до десятков тысяч оборотов в минуту.
Синхронные двигатели большой мощности экономически выгоднее, чем двигатели другого типа. Также целесообразно применять их в качестве привода устройств, в местах стабильной нагрузки, где не требуются частые пуски и двигатель должен работать с постоянной частотой вращения, например: компенсаторы, насосы, воздухоустановки, нагнетатели.
Весьма удобно, когда электрическая машина удалена от центра питания, так как при питании такого синхронного двигателя можно регулировать реактивную мощность в узле и тем самым поддерживать постоянное напряжение.
Насосные агрегаты с приводом от асинхронного двигателя устанавливаются на электростанциях. При питании двигателя, находящегося на электростанции, нет потерь мощности на передачу реактивной энергии по ЛЭП, не требуется от электродвигателя выдача реактивной энергии в сеть. В этих условиях асинхронные короткозамкнутые двигатели имеют значительные преимущества перед синхронными, в части удобства и простоты обслуживания, а также стоимости. Стоимость асинхронного короткозамкнутого двигателя в среднем на 20% меньше стоимости синхронного двигателя с электромашинным возбудителем.
В настоящее время в эксплуатации находится большое количество крупных вертикальных электродвигателей переменного тока. В ирригационных и оросительных системах, на насосных станциях городского и промышленного водоснабжения устанавливаются насосные агрегаты с вертикальными электродвигателями, преимущественно синхронными, мощностью от 500 до 25000 кВт.
На гидроаккумулирующих станциях, где агрегаты работают то как насосы, создавая запасы воды в водохранилищах, то как турбины, расходуя запасенную воду в часы пиков электронагрузки, мощность синхронных двигателей-генераторов доходит до 100 МВт и более.
Таким образом, синхронный двигатель в сравнении с другим двигателем имеет следующие преимущества:
1. возможность генерирования, поглощения и регулирования реактивной мощности;
2. меньшая зависимость перегрузочной способности от напряжения;
3. возможность кратковременно увеличивать перегрузочную способность за счет форсировки возбуждения.
4. стабильная частота вращения, что обеспечивает технологичность процесса.
И следующие недостатки:
1. сложность изготовления, дороговизна, меньшая надежность;
2. сложность в управлении и регулировании скорости вращения;
3. довольно сложный пуск.
1. Описание конструкции синхронного двигателя.
1.1
Общие сведения
Следует выделить две основные части синхронной машины: статор и ротор. Статор представляет собой неподвижный полый шихтованный сердечник с продольными пазами внутри, в которых расположена обмотка статора. Во внутренней полости статора расположена вращающаяся часть машины – ротор, который может иметь явно полюсное и неявно полюсное исполнение. В неявно полюсной машине зазор между ротором и статором постоянный. В роторе крепится обмотка возбуждения и демпферная клетка, которая служит для пуска и успокоения ротора при резком изменении режимных параметров. Обмотка возбуждения создает неподвижное поле. К валу ротора подводится нагрузка.
Синхронная машина может работать в двух различных режимах: в автономном и параллельно с сетью. В автономном режиме машина является единственным источником энергии для потребителей, то есть работает только в генераторном режиме. При работе от сети или параллельно сети она может работать в режимах синхронного генератора, двигателя, компенсатора. Рассмотрим принцип действия синхронной машины, которая имеет питание как обмотки возбуждения, так и обмотки статора от независимых источников: обмотка возбуждения - от возбудителя, обмотка статора – от трехфазной сети. Если подать постоянное напряжение на обмотку возбуждения, то по ней потечет постоянный ток, который будет создавать неподвижное, относительно ротора, поле. При подключении фаз обмотки статора, которые сдвинуты в пространстве на 1200
к трехфазной сети, то будет создана вращающееся с синхронной скоростью поле. Если ротор привести во вращение с синхронной скоростью, то эти поля, относительно друг друга станут неподвижными.
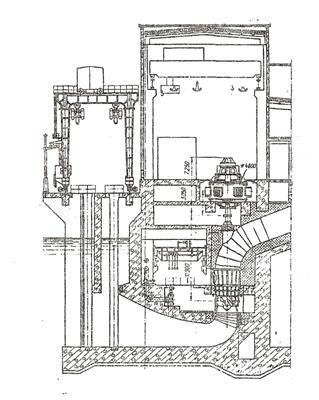
Рисунок 1 – Насосная станция с синхронным двигателем.
В зависимости от положения ротора возникнет момент - тормозящий или двигательный. Таким образом, синхронная машина при подключении к сети, в зависимости от положения ротора, может работать как в генераторном, так и в двигательном режимах. В режиме двигателя ротор отстает от поля статора, в отличии от генераторного, где ротор опережает. Под действием электромагнитного момента, который совпадает с направлением вращения и противонаправлен внешнему нагрузочному моменту, происходит синхронное вращение ротора. Степень загруженности оценивают рабочим углом q - угол между ротором и осью поля статора. Чем больше нагрузка, тем больше q.

Рисунок 2 – Общий вид вертикального синхронного двигателя.
1.2
Основные конструкционные особенности
 Исполнение вертикального электродвигателя – подвесное с подпятником, расположенным выше корп
уса ротора, и двумя направляющими подшип
никами в верхней и нижней крестовинах и с фланцевым концом вала для присоединения к насосу. Двигатель выполнен с подпятниками и направляющими подшипниками скользящего трения. Исполнение вертикального электродвигателя – подвесное с подпятником, расположенным выше корп
уса ротора, и двумя направляющими подшип
никами в верхней и нижней крестовинах и с фланцевым концом вала для присоединения к насосу. Двигатель выполнен с подпятниками и направляющими подшипниками скользящего трения.
Синхронный вертикальный электродвигатель оснащен статическими тиристорными возбудителями с питанием через согласующий трансформатор от сети собственных нужд или бесщеточными возбудителями переменного тока с вращающимся диодным преобразователем.
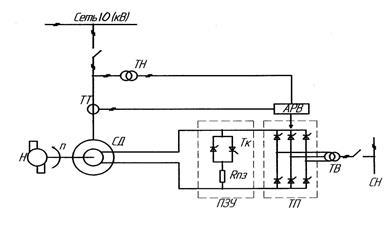
Рисунок 3 – Принципиальная схема тиристорного возбуждения.
Тиристорный
возбудитель
управляет пуском и остановкой двигателя. При пуске, когда в обмотке ротора индуктируется переменная э.д.с., обмотка должна быть включена на резистор, чтобы создать замкнутую цепь для отрицательной полуволны тока. При пуске синхронного двигателя тиристорный преобразователь заперт, обмотка возбуждения включена на разрядный резистор через тиристорный ключ, который представляет собой два встречно-параллельных тиристора. К концу пуска, когда напряжение на обмотке ротора падает, включается тиристорный преобразователь, а тиристоры ключа запираются. Управление тиристорным ключом производится стабилитронами.
Корпус статора
вертикального электродвигателя имеет круглую форму и выполнен сварным из листовой стали. Он состоит из горизонтально расположенных круглых фланцев, промежуточных рам, распорных ребер и цилиндрической обшивки с отверстиями для выхода нагретого воздуха.
Сердечник статора
синхронного электродвигателя состоит из гладких штампованных сегментов из электротехнической стали толщиной 0,5 мм с выштампованными по внутреннему диаметру открытыми пазами для катушек обмотки, сегментов с вентиляционными распорками и концевых сегментов с нажимными пальцами. Сегменты собраны в пакеты и стянуты посредством нажимных фланцев и шпилек в корпусе статора. Сегменты штампуют из электротехнической стали марки 1512 и покрывают с обеих сторон лаком горячей сушки.
Пакеты сердечника разделяют между собой сегментами с вентиляционными распорками, образующими радиальные вентиляционные каналы. Сегмент с вентиляционными распорками представляет собой два сложенных штампованных листа электротехнической стали марки, к которым прикреплены стальные полоски из специального нормализованного профиля двутаврового сечения. Концевые сегменты крайних пакетов выполняются с нажимными пальцами. Для повышения эффективности вентиляции и обеспечения более равномерного охлаждения сердечника и обмотки статора крайние пакеты сердечника выполняются большей ширины, чем средние.
Сердечник статора выполнен из штампованных сегментов и разделен радиальными каналами на ряд пакетов. Пакеты собираются в остов сварной конструкции, выполненный из стального листа и состоящий из двух рам, ряда ребер и нажимного фланца. Сердечник закрепляется в остове посредством стяжных шпилек, пропущенных через отверстия в спинке сегментов, в раме и нажимном фланце.
Вертикальный синхронный двигатель выполнен с катушечными петлевыми двухслойными обмотками
с укороченным шагом. Катушки состоят из ряда витков обмоточной меди прямоугольного сечения марки ПСД с двусторонней изоляцией толщиной 0,33 мм. Каждый виток состоит из одного или нескольких проводников, по ширине паза располагается не более двух проводников. Для катушек обмоток необходимо на каждый виток накладывать витковую изоляцию.
В вертикальном электродвигателе для изоляции
катушечных статорных обмоток
применена изоляция высоковольтных машин на термореактивных связующих. Изоляция катушек выполнена из стеклослюдинитовой ленты, пропитанной эпоксидным компаундом горячего отвердения. На катушку после наложения витковой изоляции накладывается многими слоями вполнахлеста сухая стеклослюдинитовая лента толщиной 0,13 мм, представляющая собой слюдинитовый материал на стеклотканевой основе. Сверху на стеклослюдинитовую ленту накладываются слои стеклоленты толщиной 0,1 мм вполнахлеста. Изолированные катушки в холодном состоянии укладываются в открытые пазы сердечника статора а заклиниваются клиньями. Дальнейший процесс производится в специальной вакуум - пропиточной установке с обогреваемыми котлами.
Катушки, заложенные в пазы, удерживаются в них посредством стеклотекстолитовых клиньев со скошенными на протяжении вентиляционного канала краями для улучшения вентиляции.
Изоляция бандажных колец выполняется из слюдопластоленты и стеклолакоткани. Крепление междукатушечных соединений обмотки выполнено с помощью шнура. Выводные концы соседних катушек скреплены между собой шнуром, образуя общее кольцо.
От обмотки статора к коробке выводов выведены четыре конца. Нулевые выводы обмотки соединяются в звезду внутри корпуса статора и подключаются к четвертому выводу коробки обычной конструкции со сварным стальным корпусом.
Концы обмотки статора подключены к медным контактным шпилькам, встроенным в центральные отверстия опорных фарфоровых изоляторов, установленных на корпусе коробки. Кабельные концы, подключаемые к сети, присоединены к другим концам медных шпилек, расположенным с противоположной стороны опорных изоляторов. Корпус коробки выводов сварной конструкции выполняется из стального листа и закрывается стальной крышкой. Внизу корпус имеет уплотняющее устройство для выводного кабеля и снабжен фланцем для прикрепления кабельной муфты.
Остов ротора
выполнен в виде сварной конструкции, состоящей из кованой стальной втулки, двух круглых рам из толстого листа и поперечных ребер прямоугольного сечения. Кроме приварки, рамы закрепляются на втулке стальными цилиндрическими штифтами.
Обмотка возбуждения
синхронного двигателя выполнена из отдельных полюсных катушек с открытыми наружной и внутренней поверхностями.
Катушка полюса изготовлена из шинной меди специального профиля. Применением подобной меди достигается увеличение наружной поверхности катушки и улучшение съема тепла с катушки.
Синхронный вертикальный двигатель имеют демпферную (пусковую) обмотку
, состоящую из круглых стержней, припаянных концами к медным пластинам (сегментам). Стержни зафиксированы по центру полюсного башмака с помощью чеканки для обеспечения равномерного удлинения от торцов башмака при нагреве. Сегменты демпферных обмоток выполнены из меди и припаяны к стержням тугоплавким припоем. Сегменты расположены в горизонтальной или вертикальной плоскости.
В вертикальном синхронном двигателе токоподвод
от контактных колец к обмотке возбуждения выполнен из изолированных кабелей и помещен в центральном отверстии вала.
Вал
вертикального электродвигателя изготовлен кованным из стали марки 35.
Для сопряжения с приводом вал выполнен с фланцевым концом для непосредственного сопряжения. На вал насаживаются наглухо втулка нижнего направляющего подшипника и съемная втулка подпятника. Для обеспечения соосности втулок и вала и параллельности опорной поверхности втулки подпятника и фланца окончательная обработка вала производится с уже насаженными втулками.
Для укладки токоподвода от обмотки ротора до контактных колец верхняя часть вала выполняется с центральным отверстием.
Для закрепления на валу остова ротора, контактных колец, втулок и других деталей применяются стальные призматические шпонки. В электродвигателе для закрепления остова ротора могут применяться также и клиновые шпонки. В вертикальном электродвигателе валы передают только вращающий момент. Вертикально расположенные валы испытывают относительно небольшой изгибающий момент от сил одностороннего магнитного притяжения при неравномерном зазоре между статором и ротором электродвигателя. Кроме того, незначительные изгибающие усилия испытывают валы от небаланса вращающихся частей электродвигателя.
2.Синтез электромагнитного ядра синхронного двигателя типа ВДС 2-325-24. Расчёт к курсовой работе
2.1 Расчет номинальных величин:
2.1.1 Номинальная полная мощность
 = =
2.1.2 Номинальный фазный ток статора:

2.2Расчет сердечника статора:
2.2.1 Число пар полюсов
2.2.2 Внутренний диаметр статора:
2.2.3 Полюсное деление:

2.2.4 Длина сердечника статора:

2.2.5 Высота спинки сердечника статора

2.2.6 Высота паза статора:

2.2.7 Ширина паза статора:
 при при  =4000 кВт >1000 кВт; =4000 кВт >1000 кВт;
при термореактивной изоляций:  0; 0;

Для получения удовлетворительного варианта двигателя нужно обеспечить выполнение соотношений :
 ; ;  и и  ; ; 
Соотношения сошлись путем коррекций высоты спинки сердечника статора 
2.2.8 Число параллельных ветвей:
По техническим причинам ток одной катушки не должен превышать 250-275 А. Если номинальный ток статора превышает эти значения, то обмотку выполняют из нескольких параллельных ветвей. Число параллельных ветвей -а- выбирается из ряда чисел кратных числу полюсов:  => (24,12,6,4,3,2,1); => (24,12,6,4,3,2,1);
Выбираю  так как выполняется условие так как выполняется условие
 ; ;
 ; ;
2.2.9 Минимальное зубцовое деление:

2.2.10 Максимальное возможное число пазов статора:

2.2.11 Число пазов на полюс и фазу:
 ; ;
Округляем число пазов на полюс до целого  4 4
2.2.12 Число пазов статора:
 ; ;
2.2.13 Число пазов в сегменте:
 (Выбирается в диапазоне
(Выбирается в диапазоне =6-18 и должно быть кратным Z) =6-18 и должно быть кратным Z)

Проверка
: А=0,860/4; 
Хорда должна быть меньше ширины А на 5-10мм, то есть должно удовлетворять условию (0.005< <0.010) <0.010)
2.2.14 Зубцовое деление

2.3 Расчет обмотки статора:
2.3.1 Линейная нагрузка
 
2.3.2 Число эффективных проводников в пазу

2.3.3 Число элементарных проводников в одном эффективном:
Предварительное значение плотности тока в ОС:

 - предварительная площадь сечения элементарного проводника - предварительная площадь сечения элементарного проводника 
 округляем до целого числа округляем до целого числа  =3; =3;
2.3.4 Ширина элементарного проводника:
 толщина витковой изоляций
толщина витковой изоляций ( Марка провода: ПСД ( Марка провода: ПСД ) )
 толщина корпусной изоляций толщина корпусной изоляций  (Тип изоляции: термореактивный ) (Тип изоляции: термореактивный )
 число элементарных проводников по ширине паза число элементарных проводников по ширине паза  ,т.к. нечетное; ,т.к. нечетное;



Значения  и и  примерно соответствуют пределам примерно соответствуют пределам  
2.3.6 Уточнение размеров паза
По найденным значениям и  определяются размеры стандартного проводника и его сечения определяются размеры стандартного проводника и его сечения  , ,    затем рассчитываем размеры паза затем рассчитываем размеры паза
Размеры паза должны удовлетворять соотношениям:
 
  ; ;
2.3.7 Проверка среднего перепада температуры:
Плотность тока в обмотке статора:

Теплопроводность изоляций: (так как тип изоляций: термореактивный); (так как тип изоляций: термореактивный);

Средний перепад температуры  не должен превышать не должен превышать ; ;
2.3.8 Число витков в фазе:

2.3.9 Шаг обмотки (
округляется до ближайшего целого):
 число фаз
число фаз
 округляем до y=10 округляем до y=10
2.3.10 Укорочение шага
2.3.11 Коэффициент укорочения

2.3.12 Коэффициент распределения
2.3.13 Обмоточный коэффициент

2.4 Коррекция главных размеров статора по уровню6 индукции в воздушном зазоре, зубцах и спинке статора:
2.4.1 Число вентилируемых каналов (
округляется до ближайшего целого):
 Ширина пакета статора; Ширина пакета статора; 
 Ширина вентиляционного канала;
Ширина вентиляционного канала; 
 округляем до
округляем до 
2.4.2 Длина сердечника статора:

Пересчитываем
 округляем да округляем да
2.4.3
Индукция в воздушном зазоре над серединой полюса:
Коэффициент полюсного перекрытия


2.4.4 Индукция в спинке статора:
 высота спинки статора;
высота спинки статора; 
 - суммарная длина пакетов статора; - суммарная длина пакетов статора; 

2.4.5 Индукция в зубцах на высоте 1/3 от основания паза:
 ширина зубца на высоте 1/3 от основания паза:
ширина зубца на высоте 1/3 от основания паза:


Так как полученные значения индукций не подходят в пределы:
 ; ;
 ; ;

Выполняем коррекцию главных размеров:
| Проектные показатели |
Вариант коррекций |
| 1 |
2 |
3 |
| Di
|
2.943 |
2.923 |
2.933 |
| nb
|
8 |
8 |
7 |
| br
|
0.04 |
0.04 |
0.04 |
 |
0.44 |
0.44 |
0.39 |
 |
0.36 |
0.36 |
0.32 |
 |
0.032 |
0.032 |
0.032 |
 |
0.385 |
0.383 |
0.384 |
 |
0.082 |
0.092 |
0.087 |
 |
0.019 |
0.019 |
0.019 |
 |
0.661 |
0.665 |
0.748 |
 |
1.447 |
1.316 |
1.566 |
 |
1.468 |
1.485 |
1.661 |
Третий вариант коррекций подошел в пределы путем изменения внутреннего диаметра и числа вентилируемых каналов.
2.5 Выбор величины воздушного зазора:
2.5.1 Линейная нагрузка

2.5.2 Величина воздушного зазора под серединой полюса
 

Найденное значение  не должно быть меньше граничного не должно быть меньше граничного 

одновременно проверим условие   и округляем до требуемой точности: и округляем до требуемой точности:
 м м
2.6 Расчет полюса и демпферной обмотки:
2.6.1 Ширина полюсного наконечника

2.6.2 Высота полюсного наконечника:
так как мы выбираем шихтованные полюса

2.6.3 Ширина сердечника полюса

2.6.4 Высота сердечника полюса
2.6.5 Число стержней демпферной обмотки
(
округляется до ближайшего целого):
 округляем до округляем до 
2.6.6 Сечение стержня демпферной обмотки:

2.6.7 Диаметр стержня демпферной обмотки:

округляем с точность до   размеры демпферной обмотки корректируется по условию термической устойчивости: размеры демпферной обмотки корректируется по условию термической устойчивости: 
 ; ;
113.04 10>0.0556282.3910.384; 1130.4>1080.622 условие выполняется; 10>0.0556282.3910.384; 1130.4>1080.622 условие выполняется;
2.6.8 Шаг демпферной обмотки

Для уменьшения добавочных потерь и исключения прилипания ротора при пуске  и их шаг и их шаг  корректируются так, чтобы выполнялось условие корректируются так, чтобы выполнялось условие
(10-1) (1-0,027/0,032)=1,406>0,75 условие выполняется;
2.6.9 Площадь поперечного сечения короткозамкнутых колец:
так как полюса шихтованные то выбираем:

2.6.10 Поперечные размеры короткозамкнутых колец:
 ; ;

По стандартным значениям шинной меди выбираем  =11 =11 ; ;  =45; =45;
2.6.11 Ширина шлица паза демпферной обмотки

2.6.12 Высота шлица паза демпферной обмотки

2.7 Расчет магнитной цепи:
Схема замещения магнитной цепи синхронного двигателя

 -МДС обмотки статора -МДС обмотки статора
 -магнитное напряжение воздушного зазора -магнитное напряжение воздушного зазора
 -магнитное напряжение зубцов статора -магнитное напряжение зубцов статора
 -магнитное напряжение спинки статора -магнитное напряжение спинки статора
 -магнитное напряжение участке рассеяния -магнитное напряжение участке рассеяния
 -магнитное напряжение полюса ротора -магнитное напряжение полюса ротора
 -МДС обмотки возбуждения -МДС обмотки возбуждения
Спинка статора:
Длина участка: Ширина участка: Ширина участка: 
Площадь участка: 
Длина силовой линии:

Зубцы статора:
Длина участка: 
Ширина участка: 
Площадь участка: 
Длина силовой линии: 
Зазор:
Длина участка:
Ширина участка: 
Площадь участка: 
Коэффициент Картера  : :






Длина силовой линии

Полюс ротора:
Длина участка : 
Ширина участка: 
Площадь участка

Длина силовой линии:

Первая гармоника основного магнитного потока на холостом ходу:

МДС обмотки статора по продольной оси:
Коэффициент приведения обмотки статора по продольной оси:



Коэффициент формы поля:

Поток, приходящийся на полюсный наконечник:




Коэффициент проводимости
 : :




  = =

Коэффициенты  и и : :
Для режима холостого хода  ; и режима номинальной нагрузки ; и режима номинальной нагрузки  ; ;
Расчет магнитной цепи:
Активное сопротивление ОС:



Расчет магнитной цепи для режима х.х. (i = 1):
Выбираем ЭТС среднелегированную марки 3413
Спинка статора:
Магнитный поток:

Индукция:
Напряженность (по кривым намагничивания)

Магнитное напряжение

Зубцы статора:
Магнитный поток:

Индукция

Напряженность (по кривым намагничивания)

Магнитное напряжение

Зазор:
Магнитный поток
Индукция
Напряженность (по кривым намагничивания)

Магнитное напряжение

Для полюса используем марку
Полюс ротора:
Магнитное напряжение на участке рассеяния полюсов:

Коэффициент рассеяния:

Магнитный поток

Индукция
Напряженность (по кривым намагничивания)

Магнитное напряжение

Результирующее магнитное напряжение в режиме холостого хода:


Индуктивное сопротивление рассеяния ОС:




Расчет E и магнитного потока при номинальной нагрузке:


Расчет магнитной цепи для режима номинальной нагрузки (i = 2):
Выбираем ЭТС среднелегированную марки 3413
Спинка статора:
Магнитный поток

Индукция
Напряженность (по кривым намагничивания)

Магнитное напряжение

Зубцы статора:
Магнитный поток

Индукция

Напряженность (по кривым намагничивания)

Магнитное напряжение

Зазор
Магнитный поток
Индукция

Напряженность (по кривым намагничивания)

Магнитное напряжение

Для полюса используем марку
Полюс ротора
Магнитное напряжение на участке рассеяния полюсов:

Коэффициент рассеяния:

Магнитный поток

Индукция
Напряженность (по кривым намагничивания)

Магнитное напряжение

Результирующее магнитное напряжение при номинальной нагрузке:


МДС обмотки возбуждения в номинальном режиме:
2.8 Расчет перегрузочной способности:
2.8.1 МДС обмотки возбуждения в режиме трехфазного К.З. при номинальном токе статора:

2.8.2Проверка кратности максимального синхронного момента:
 ; ;   условие выполняется. условие выполняется.
2.9 Расчет обмотки возбуждения:
2.9.1 Ширина провода ОВ:



Ширина провода обмотки возбуждения ограничивается:
1). условием ее размещения в межполюсном пространстве  : :
 так как число пар полюсов р=24 >2; так как число пар полюсов р=24 >2;

 ; 27,281<42,084; условие выполняется; ; 27,281<42,084; условие выполняется;
2).Условием надежного крепления обмотки возбуждения на полюсе  : :

; 27.281<38,773; условие выполняется;
Полученные значения должны соответствовать пределам: и 
2.9.2 Высота провода ОВ:
Приводим размеры провода обмотки возбуждения в соответствие со стандартными размерами шинной меди и определим сечение провода  : :
 3,53 3,53  ; ;
 =32 ; =32 ;
 =110,3 =110,3 
2.9.3 Средняя длина витка обмотки возбуждения:
так как ;
то выбираем формулу: ;
то выбираем формулу:

2.9.4 Номинальное напряжение возбуждения:

2.9.5 Число витков ОВ:
 округляется до округляется до 46 46
2.9.6 Ток возбуждения х.х.:

2.9.7 Ток возбуждения при номинальной нагрузке:

2.9.8 Плотность тока в обмотке возбуждения при номинальной нагрузке:
2.9.9 Перегрев обмотки возбуждения:

Номинальные значения напряжения и тока обмотки возбуждения приводим в соответствие с номинальными данными возбудителей:
 140 В; 140 В;
 450 А. 450 А.
Окончательный выбор размеров проводника обмотки возбуждения должен удовлетворять условиям
 ; ;  ; ;
 ; ;  ; ;
 ; ;  ; ;
Все условия выполняются.
3. Синтез и оптимизация электромагнитного ядра на ПК
Параметрическая оптимизация проводится на основе результатов аналитического ручного расчета, приведенного в главе 2. Процесс оптимизации имеет пошаговый характер и осуществляется при помощи программы “OPTCD”. На каждом шаге производится корректировка по одному или нескольким параметрам.
Данная глава содержит описание процесса направленного перебора значений с целью корректировки основных показателей двигателя. Основными этапами параметризации являются:
1. Поиск приемлемого варианта;
2. Оптимизация по минимуму приведенной стоимости (метод деформируемого многогранника);
3. Оптимизация по минимуму резервов (метод ЛП/tau);
Номинальные данные:
Номинальная мощность Pн
=4000кВт
Номинальное линейное напряжение Uн
=6кВ
Номинальный коэффициент мощности cosφн
=0.9
Номинальная частота напряжения сети fн
=50Гц
Число пар полюсов p=12
Номинальный ток возбудителя Iвн
=450А
Исходные значения конструктивных параметров:
Внутренний диаметр статора Di
=2.933м
Число пазов статора Z=288
Число эффективных проводников в пазу Uп
=8
Длина сердечника статора lt
=0.39м
Величина воздушного зазора δ=0.009м
Ширина паза статора bп
=0.013м
Высота паза статора hп
=0.071м
Ширина сердечника полюса bm
=0.208м
Высота сердечника полюса hm
=0.208м
Ширина полюсного наконечника bpm
=0.278м
Высота проводника обмотки возбуждения aem
=3.53мм
Ширина проводника обмотки возбуждения bem
=32мм
Число стержней демпферной обмотки nc
=10
3.1 Поиск приемлемого варианта
Оптимизация параметров двигателя производится с помощью программы поисковой оптимизации двигателя «OPTCD». В таблице 1 приведены результаты ручного расчета двигателя по исходным данным. В первых двух колонках приводятся исходные значения, другие две – рассчитанные значения основных показателей двигателя. При выполнении всех ограничений целевая функция CF должна быть равна приведенной стоимости двигателя CД
.
Таблица 1 - Экспресс – информация по данным, полученным при ручном расчете.

Из расчета видно, что двигатель с такими параметрами не удовлетворяет условиям, заданным в начале работы:
1. Как видим отношение Ms/Mн = 1.2 слишком мало.
2. Перегрев обмотки статора слишком велик.
3. Целевая функция CF больше приведенной стоимости двигателя, что говорит о наложении штрафов за несоблюдение ограничений.
Если мы увеличим высоту проводника обмотки возбуждения aem
, уменьшим число стержней демпферной обмотки nс,
и уменьшим внутренний диаметр статора, то получим следующие результаты (таблица 2):
Таблица 2 - Экспресс – информация по скорректированным данным.

Как мы можем видеть, программа не налагает штрафов на двигатель с данными параметрами, но в этом случае получены не наилучшие значения удельных расходов меди и железа, КПД и относительно высокой для заданной номинальной мощности двигателя приведенной стоимостью.
3.2 Оптимизация по минимуму приведенной стоимости
Произведем расчет в программе OPTCD по методу деформируемого многогранника и получим минимум приведенной стоимости и оптимальные показатели Uп и Z(таблица 3):
Таблица 3 - Экспресс – информация по данным, полученным в методе деформируемого многогранника.

3.3.Оптимизация по минимуму резервов
Произведем расчет в программе OPTCD по методу ЛП/tauи получим минимум расхода активных материалов и оптимальные показатели Uп и Z:
Таблица 4 - Экспресс–информация по данным, полученным в методе ЛП/tau.

В последних двух таблицах представлены данные, рассчитанные компьютером, направленные на уменьшение приведенной стоимости и снижение расходов активных материалов. Также компьютер просчитал оптимальную комбинацию числа пазов статора Z и числаэффективных проводников в пазу Uп. Примем эти две величины как постоянные и попробуем улучшить характеристики нашего двигателя.
Как можно увидеть из Таблицы 2, программа не налагает штрафы на двигатель с данными параметрами, но перегрев демпферной обмотки необходимо поднять для более результативной работы.
Для достижения этой цели и для увеличения КПД чуть увеличим внутренний диаметр статора, уменьшим ширину проводника обмотки возбуждения bem
, уменьшим число стержней демпферной обмотки nc
,
и изменим длину сердечника статора. Также увеличим ширину полюсного наконечника и высоту паза статора. Получим следующие результаты(таблица 5 ):
Таблица 5 - Экспресс–информация по скорректированным данным.

3.4 Выбор оптимального варианта
Так как в нашем расчете мы больше опираемся на технико – физические характеристики двигателя, а не на экономические, то более оптимальным вариантом машины является тот, который приведен в Таблице 5. Основные его преимущества перед остальными вариантами оптимизации, в том числе вариантами автоматической компьютерной оптимизации, это почти идеальные температурные показатели для машин этого класса, существенно меньший удельный расход меди (даже при сравнении оптимизацией по минимуму резервов), относительно невысокой общей стоимостью двигателя и приемлемыми параметрами конструкции.
Таблица 6 - Оптимальный вариант параметров.
Таким образом, Таблица 6 отображает оптимальный вариант синхронного двигателя при заданных ограничениях. Дальнейшие действия, направленные на увеличение КПД или уменьшение стоимости приводят к перегреву обмотки возбуждения несоответствия заданной кратности входного момента.
Сведем все варианты оптимизации в единую сводную таблицу:
Таблица 7 - Сводная таблица.
| параметры |
1 |
2 |
3 |
4 |
5 |
| Di |
2.93 |
2.8 |
2.805 |
2.820 |
2.82
|
| lt |
0.39 |
0.39 |
3.363 |
0.376 |
0.376
|
| hп |
0.071 |
0.071 |
0.072 |
0.075 |
0.075
|
| bп |
0.013 |
0.013 |
0.013 |
0.013 |
0.013
|
| Uп |
8 |
8 |
8 |
8 |
8
|
| Z |
288 |
288 |
288 |
288 |
288
|
| a |
2 |
2 |
2 |
2 |
2
|
| δ |
0.009 |
0.009 |
0.0073 |
0.0072 |
0.009
|
| GFeуд |
0.638 |
0.929 |
0.871 |
0.839 |
0.839
|
| GCuуд |
0.539 |
0.530 |
0.433 |
0.456 |
0.423
|
| КПД |
95.38 |
95.27 |
95.47 |
95.61 |
95.14
|
| Iвн |
343,3 |
390,2 |
287,6 |
331,8 |
353,1
|
| AS |
56435 |
59056 |
58950 |
58637 |
58637
|
| Bm |
1.766 |
1.592 |
1.486 |
1.527 |
1.498
|
| Bz |
1.629 |
1.730 |
1.813 |
1.851 |
1.815
|
| Bj |
1.766 |
1.014 |
1.069 |
1.125 |
1.152
|
| J1 |
6.68 |
6.68 |
6.31 |
5.73 |
6.31
|
| J2 |
3.02 |
3.44 |
3.82 |
3.78 |
4.50
|
| DtOB |
42.9 |
58.4 |
53.7 |
53.0 |
68.2
|
| DtOC |
78,1 |
77,6 |
74,6 |
65,6 |
71,3
|
| CF |
151.17 |
30.67 |
29.29 |
29.35 |
30.72
|
| CD |
57110.6 |
58165.3 |
55642.8 |
57817.2 |
56487.7
|
| Mп/Mн |
0,72 |
0,77 |
0,98 |
0,72 |
0,73
|
| Iм/Iн |
5,07 |
5,15 |
5,11 |
4,81 |
4,94
|
| Mм/Mн |
2,23 |
2,53 |
2,11 |
2,14 |
2,25
|
| Ms/Mн |
1,20 |
1,21 |
1,20 |
1,20 |
353,1
|
Заключение
По данным технического задания был вручную рассчитан вариант синхронного двигателя, который был использован как исходные данные для расчета на ЭВМ. Расчет этих данных показал, что данный вариант двигателя отвечает не всем требованиям заказчика и требует оптимизации. Оптимизация проводилась на ЭВМ с использованием программы «OPTCD», что значительно ускорило и облегчило выполнение задания и позволило учесть особенности синхронного двигателя, которых не было при ручном расчете. В результате проведенной работы был получен предлагаемый вариант двигателя.
Полученный вариант двигателя отличается хорошо сбалансированным температурным режимом, наличием небольших запасов по показателям, средней ценой и КПД = 95.14, что характерно для машин этого класса мощности. Двигатель может нести нагрузки несколько превышающие номинальные, что позволяет говорить о высокой надежности и экономичности. В целом, для данных параметров, получился оптимальный двигатель, отвечающий необходимым технико - экономическим требованиям, что делает его конкурентоспособным и дает возможность его широкого использования в народном хозяйстве.
Библиографический список
1. Новиков Н.Н., Родионов И.Е., Шутько В.Ф. Параметрическая оптимизация явнополюсных синхронных двигателей на ЭВМ. Екатеринбург: УГТУ-УПИ, 1994.
2. Новиков Н.Н., Родионов И.Е., Шутько В.Ф. Синтез электромагнитного ядра явнополюсной синхронной машины. Екатеринбург: УГТУ-УПИ, 1994.
3. Гольдберг О.Д., Гурин Я.С., Свириденко И.С. Проектирование электрических машин. /Под ред. О.Д. Гольдберга: М: 1984.
4. Новиков Н.Н., Родионов И.Е., Шутько В.Ф. Конструктивное устройство вертикальных электродвигателей переменного тока: методические указания: УГТУ – УПИ, 2001. – 38с.
5. Копылов И.П., Клоков Б.К., Морозкин В.П. Проектирование электрических машин. / Под ред. Копылова И.П. М: 2002. -757 с.
6. Иванов – Смоленский А.В. Электрические машины. М: 1980-928 с.
Приложение
Таблица 1
- Расчетный формуляр (для оптимального варианта параметров):
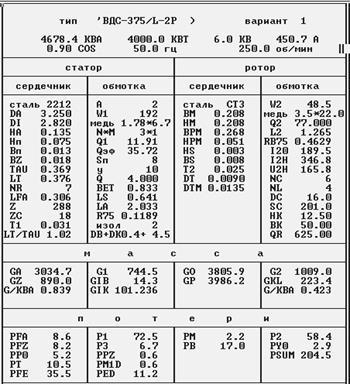
Таблица 1(продолжение)

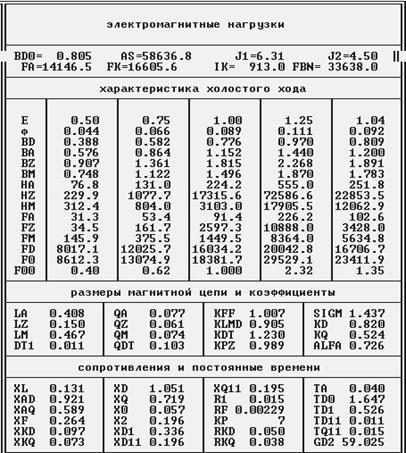
Таблица 1(продолжение)

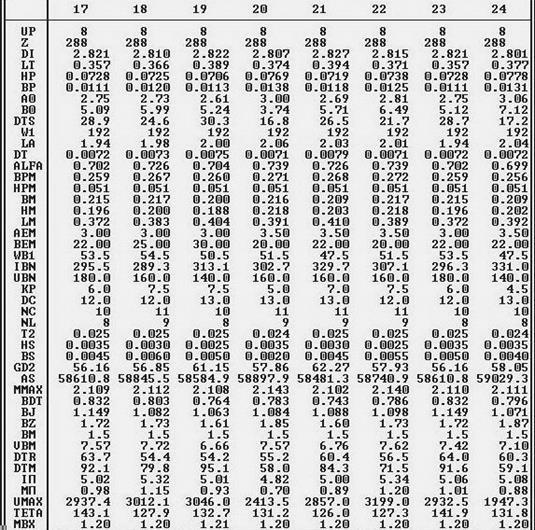
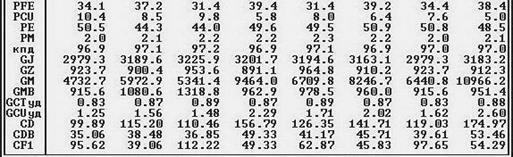
Таблица 2
- Таблица вариантов.
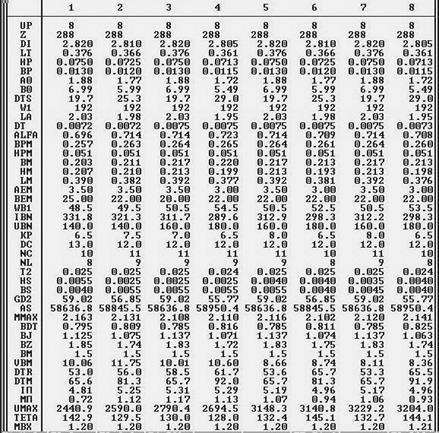
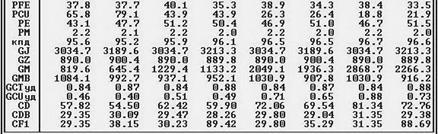
Таблица 2(продолжение)
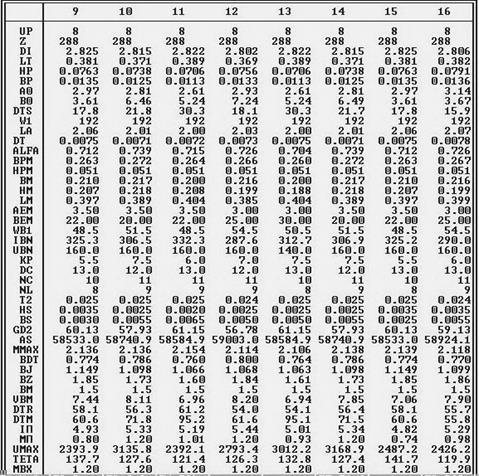
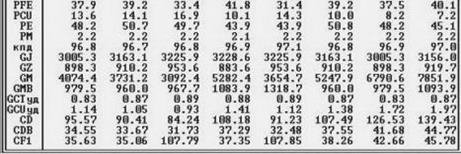
Таблица 2(продолжение)
|