Министерство сельского хозяйства Российской Федерации
Департамент научно-технологической политики и образования
Федеральное государственное образовательное учреждение
высшего профессионального образования
«Красноярский государственный аграрный университет»
Институт энергетики и управления энергетическими ресурсами АПК
Кафедра системоэнергетики
Расчетно-графическая работа
Выполнил
студент группы
Егоров А.
Красноярск 2009г.
Задача № 1. Расчет и построение естественных и искусственных характеристик двигателя постоянного тока независимого возбуждения. Характеристики при пуске и торможении
Для электродвигателя постоянного тока независимого возбуждения рассчитать и построить:
1. Естественные механическую  и электромеханическую характеристики и электромеханическую характеристики  . .
2. Искусственные механические характеристики:
• при напряжении на якоре  , ,  , номинальном магнитном потоке и отсутствии дополнительного сопротивления , номинальном магнитном потоке и отсутствии дополнительного сопротивления  в цепи якоря; в цепи якоря;
• при сопротивлении цепи якоря  , ,  , номинальном напряжении и номинальном магнитном потоке; , номинальном напряжении и номинальном магнитном потоке;
• при магнитном потоке  , ,  , номинальном напряжении и отсутствии дополнительного сопротивления в цепи якоря. , номинальном напряжении и отсутствии дополнительного сопротивления в цепи якоря.
3. Определить аналитическим и графическим методами пусковые сопротивления.
4. Определить графически сопротивления цепи якоря  при тормозном спуске груза: при тормозном спуске груза:
• при торможении противовключением с током  и скоростью и скоростью  ; ;
• при динамическом торможении с независимым возбуждением, током  и скоростью и скоростью  ; ;
• при генераторном торможении с током и скоростью, превышающей  на 15%. на 15%.
Считать, что ток возбуждения имеет номинальную величину.
Исходные данные приведены в таблице 1.1.
Технические данные двигателей постоянного тока независимого возбуждения при 
| Вариант |
 , кВт , кВт |
, А |
 ,об/мин ,об/мин |
| 6 |
0,85 |
5,3 |
950 |
Исходные данные:
Напряжение ; ток электродвигателя  5,3А; номинальная мощность 5,3А; номинальная мощность  0,85 0,85 ; номинальная частота вращения ; номинальная частота вращения  950 950 . .
Построение механических и электромеханических характеристик для электромагнитного момента и момента на валу
Координаты точек естественной механической характеристики
Расчет и построение механических характеристик электродвигателя следует начать с построения естественной механической характеристики, которая представляет собой прямую линию, проходящую через точки: с координатами  , (режим идеального холостого хода) и , (режим идеального холостого хода) и  (номинальный режим работы). (номинальный режим работы).
Угловая скорость идеального холостого хода:
 (1.1) (1.1)
где  - коэффициент ЭДС, зависящий от конструктивных параметров машины. - коэффициент ЭДС, зависящий от конструктивных параметров машины.
 (1.2) (1.2)
где  - сопротивление якоря двигателя, Ом. - сопротивление якоря двигателя, Ом.
 (1.3) (1.3)
где  - номинальное сопротивление двигателя, Ом; - номинальное сопротивление двигателя, Ом;
 - КПД двигателя при номинальной нагрузке. - КПД двигателя при номинальной нагрузке.
 (1.4) (1.4)
 (1.5) (1.5)



Номинальная угловая скорость двигателя
 (1.6) (1.6)

Номинальный электромагнитный момент
 (1.7) (1.7)

Номинальный момент на валу двигателя
 (1.8) (1.8)
Момент холостого хода, или момент потерь
 (1.9) (1.9)

Угловая скорость реального холостого хода
 (1.10) (1.10)

Координаты точек искусственных характеристик
Угловая скорость при  и и   или или  , и , и
 , , и и  , (1.11) , (1.11)



Угловая скорость идеального холостого хода при напряжении
 , и , и
 ; ; и и  (1.12) (1.12)
 ; ; 

Угловая скорость при и ; или :
 , ,  и и
 (1.13) (1.13)



Угловая скорость идеального холостого хода при ослабленном магнитном потоке
 , и , и  : :
 , , и и  (1.14) (1.14)
 ; ; 


 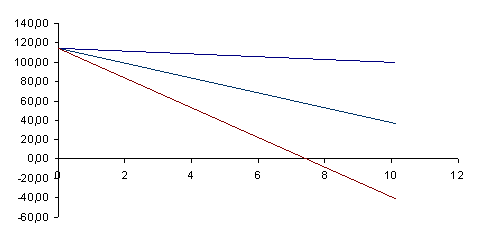
а) Механические характеристики при
дополнительном сопротивлении в цепи якоря
 
б) Механические характеристики при понижено напряжении
в) Механические характеристики при ослабленном магнитном потоке
Рис. 1.1. Механические характеристики электродвигателя постоянного тока параллельного возбуждения номинальной мощностью 0,85 кВт и номинальной частотой вращения 950 об/мин
Угловая скорость при и , или :
 , ,   и и  (1.15) (1.15)



Угловая скорость при и или :
 и и  (1.16) (1.16)


Расчет пусковых сопротивлений
Аналитический метод
В соответствии с требованиями механизма выбрать пределы изменения тока при пуске:
 (1.17) (1.17)
где  , ,  . .
 и и 

Определить общее сопротивление цепи якоря при полностью включенном пусковом сопротивлении:
 (1.18) (1.18)
Найти число пусковых ступеней
 (1.19) (1.19)
Если число ступеней получается дробным, то его округлить до целого числа и найти новое значение
 (1.20) (1.20)
Определить значения сопротивлений ступеней пускового реостата
 (1.21) (1.21)



Выполнить проверочный расчет. Общее сопротивление цепи якоря при пуске равно:
 (1.22) (1.22)

Графический метод
Задавшись значениями наибольшего  и наименьшего и наименьшего  токов при пуске, построить пусковую диаграмму. токов при пуске, построить пусковую диаграмму.
Номинальное сопротивление электродвигателя
 (1.23) (1.23)


 (1.24) (1.24)
 (1.25) (1.25)

Масштаб сопротивлений
 (1.26) (1.26)
где де - длина отрезка (рис. 1.2).
Сопротивление ступеней пускового реостата:
 (1.27) (1.27)





Рис. 1.2 Графическое определение пусковых и тормозных сопротивлений двигателя постоянного тока независимого (параллельного) возбуждения
Расчет тормозных сопротивлений
Для определения величины сопротивления, которое необходимо включить в цепь якоря электродвигателя при тормозном спуске груза с торможением противовключением, на пусковую диаграмму нанести точку с координатами  и и  . Построив характеристику, соответствующую этой точке, получим, что в цепь якоря электродвигателя необходимо включить, кроме пускового, дополнительное сопротивление, величина которого определится отрезком . Построив характеристику, соответствующую этой точке, получим, что в цепь якоря электродвигателя необходимо включить, кроме пускового, дополнительное сопротивление, величина которого определится отрезком  . .
Сопротивление, включаемое в цепь якоря при динамическом торможении, начало которого задано номинальным током и номинальной скоростью, определяется отрезком кн,  . Отрезок кн получен следующим образом: по координатам двух точек . Отрезок кн получен следующим образом: по координатам двух точек  и и  строится характеристика динамического торможения. Из точки в двигательный режим обратного направления вращения проводится характеристика, параллельная характеристике динамического торможения. строится характеристика динамического торможения. Из точки в двигательный режим обратного направления вращения проводится характеристика, параллельная характеристике динамического торможения.
Задача № 2. Расчет и построение механических характеристик асинхронного двигателя и производственных механизмов. Приведение моментов сопротивления и моментов инерции к скорости вращения вала двигателя. Определение времени переходного процесса. Энергетика переходных процессов. Устойчивость работы привода
Для системы «трехфазный асинхронный электродвигатель - рабочая машина»:
1. Рассчитать и построить естественную механическую характеристику для асинхронного короткозамкнутого двигателя по пяти точкам (пусковая, минимальная, критическая, номинальная, холостого хода) и по уравнению Клосса.
2. Рассчитать приведенную к скорости вращения вала двигателя механическую характеристику рабочей машины и построить ее в одних координатных осях с характеристикой двигателя.
3. Определить приведенный к скорости вращения вала двигателя момент инерции системы «электропривод - рабочая машина».
4. Графическим и графоаналитическим методом определить время разгона двигателя с нагрузкой при номинальном напряжении питания.
5. Рассчитать потери энергии в асинхронном двигателе при пуске системы с нагрузкой, без нагрузки и при торможении противовключением без нагрузки.
6. Оценить условия запуска электродвигателя с нагрузкой при снижении питающего напряжения на  . .
7. Для трехфазного асинхронного двигателя с короткозамкнутым ротором определить величину активного или реактивного сопротивления, которое необходимо включить в цепь статора для снижения пускового тока в два раза по сравнению с током при прямом пуске.
Исходные данные по вариантам приведены в таблице 2.1.
| вариант |
Данные двигателя |
| Тип |
 , , |
 |
 |
 |
 |
 |
 |
 |
 |
| 6 |
АИР1006 |
2,2 |
2,2 |
2,0 |
1,6 |
6,0 |
81,0 |
0,74 |
5,5 |
0,017 |
| Данные рабочей машины |
 |
 |
 |
Показатель степени |
 |
| 20,0 |
450 |
0,9 |
2 |
0,9 |
Построение механической характеристики асинхронного двигателя
Механическую характеристику асинхронного двигателя  построить на основании расчета его вращающих моментов по формуле Клосса, задаваясь следующими значениями скольжения: 0; SH
; 0,1; SK
; 0,3;0,5; 0,8; 1,0. построить на основании расчета его вращающих моментов по формуле Клосса, задаваясь следующими значениями скольжения: 0; SH
; 0,1; SK
; 0,3;0,5; 0,8; 1,0.
 (2.1) (2.1)
где  критический (максимальный) вращающий момент электродвигателя, критический (максимальный) вращающий момент электродвигателя,  ; ;  - номинальный вращающий момент, ; - номинальный вращающий момент, ;  номинальная мощность электродвигателя, Вт; номинальная мощность электродвигателя, Вт;  - номинальная угловая скорость вращения электродвигателя, с-1
; - номинальная угловая скорость вращения электродвигателя, с-1
;  - критическое скольжение электродвигателя, соответствующее максимальному вращающему моменту; - критическое скольжение электродвигателя, соответствующее максимальному вращающему моменту;  - номинальное скольжение электродвигателя; - номинальное скольжение электродвигателя;  - синхронная частота вращения электродвигателя, об/мин; - синхронная частота вращения электродвигателя, об/мин;  - кратность максимального момента. - кратность максимального момента.
Формула Клосса при скольжениях  занижает значения вращающих моментов по сравнению с действительными, так как уравнение выведено из условия постоянства параметров двигателя, а они варьируют. Поэтому механическую характеристику строят по пяти точкам, рассчитанным по каталожным данным. занижает значения вращающих моментов по сравнению с действительными, так как уравнение выведено из условия постоянства параметров двигателя, а они варьируют. Поэтому механическую характеристику строят по пяти точкам, рассчитанным по каталожным данным.

1-я точка  
 (2.2) (2.2)
2-я точка    (2.3) (2.3)
3-я точка   (2.4) (2.4)
4-я точка   (2.5) (2.5)
5-я точка   (2.6) (2.6)
Данные расчета механической характеристики свести в таблицы 2.2 и 2.3. Переход от скольжения к скорости вращения осуществить по формуле:
 (2.7) (2.7)
Таблица 2.2 Данные к построению механической характеристики асинхронного электродвигателя по пяти точкам
| S |
 |
 |
 |
 |
 |
| 0,0 |
0,055 |
0,229 |
0,800 |
1,000 |
 |
104,720 |
98,960 |
80,762 |
20,944 |
0,000 |
 |
0,000 |
22,231 |
48,909 |
35,570 |
44,462 |
Таблица 2.3 Данные к построению механической характеристики асинхронного электродвигателя по уравнению Клосса
| S |
0 |
|
 |
|
 |
 |
|
|
| 0 |
0,055 |
0,1 |
0,229 |
0,3 |
0,5 |
0,8 |
1,0 |
|
104,72 |
98,96 |
94,25 |
80,76 |
73,30 |
52,36 |
20,94 |
0,00 |
|
0 |
22,23 |
35,90 |
48,91 |
47,17 |
37,01 |
25,86 |
21,27 |
Построение механической характеристики рабочей машины
Приведенный момент вращения рабочей машины к валу двигателя  определяют, используя следующие соотношения определяют, используя следующие соотношения
 (2.8) (2.8)

где  -передаточное число; -передаточное число;  - КПД механической передачи; - КПД механической передачи;  - момент статического сопротивления рабочей машины при ее номинальной частоте вращения, - момент статического сопротивления рабочей машины при ее номинальной частоте вращения,  ; ;  - момент сопротивления при скорости вращения - момент сопротивления при скорости вращения  , ; , ;  - момент трогания механизма, ; - момент трогания механизма, ;  - показатель степени (определить из табл. 2.4); - показатель степени (определить из табл. 2.4);  - частота вращения двигателя, .; - частота вращения двигателя, .;  - частота вращения вала рабочей машины, - частота вращения вала рабочей машины,
   (2.9) (2.9)
Таблица 2.4 Соответствие показателя степени группам механизмов
| Перечень механизмов |
Показатель. степени х |
| Подъемные лебедки, краны, ленточные транспортеры, конвейеры с постоянной загрузкой |
0 |
| Генераторы постоянного тока независимого возбуждения, зерноочистительные машины |
1 |
| Вентиляторы, центробежные насосы, сепараторы, молотильные барабаны |
2 |
| Металлорежущие станки |
-1 |
В соответствии с выбранным рабочим механизмом определить значения  из таблицы 2.5. Момент трогания механизма определить по формуле из таблицы 2.5. Момент трогания механизма определить по формуле
 (2.10) (2.10)
  
Таблица 2.5 Значения величин коэффициента
| Перечень механизмов |
 |
| Пневмотранспортеры, вентиляторы, центробежные насосы, молочные сепараторы |
0,3 |
| Транспортеры, конвейеры, подъемные машины, молотильные аппараты, смесители |
0,3...1 |
| Дробилки, измельчители, пилорамы |
1 |
Задаваясь значением скорости вращения  или частоты вращения или частоты вращения  , определить момент сопротивления рабочей машины по выражению (1.29). Данные расчета свести в таблицу 2.6. , определить момент сопротивления рабочей машины по выражению (1.29). Данные расчета свести в таблицу 2.6.
Таблица 2.6
|
0,00 |
20,94 |
52,36 |
73,30 |
80,76 |
94,25 |
98,96 |
104,72 |
 |
3,53 |
4,92 |
12,24 |
20,60 |
24,25 |
31,74 |
34,63 |
38,36 |
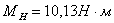
На основании расчетных данных строятся механическая характеристика рабочей машины и механическая характеристика электродвигателя (рис. 2.1).
Определение времени разгона привода
Графическое решение уравнения движения электропривода
Если невозможно аналитически решить уравнение движения электропривода
то его решают методом пропорций или методом конечных приращений. Сущность этого метода заключается в замене бесконечно малых приращений скорости  и времени и времени  малыми конечными приращениями малыми конечными приращениями  и и  . При этом предполагается, что в уравнение движения электропривода подставляются средние значения динамического (избыточного) момента . При этом предполагается, что в уравнение движения электропривода подставляются средние значения динамического (избыточного) момента  для каждого интервала изменения скорости. Характеристика динамического момента находится графическим путем на основании вычитания механической характеристики производственного механизма из механической характеристики двигателя (рис. 2.1). для каждого интервала изменения скорости. Характеристика динамического момента находится графическим путем на основании вычитания механической характеристики производственного механизма из механической характеристики двигателя (рис. 2.1).

где  — приведенный к скорости вращения вала двигателя момент инерции системы «двигатель - рабочая машина», — приведенный к скорости вращения вала двигателя момент инерции системы «двигатель - рабочая машина», . .
Расчет продолжительности пуска и торможения электропривода заключается в следующем:
Выбираются масштабы момента  , ,  ; скорости вращения ; скорости вращения  , ,  ; и времени , ; и времени ,  . Масштаб момента инерции . Масштаб момента инерции  определяется из соотношения: определяется из соотношения:
электропривод двигатель пуск торможение
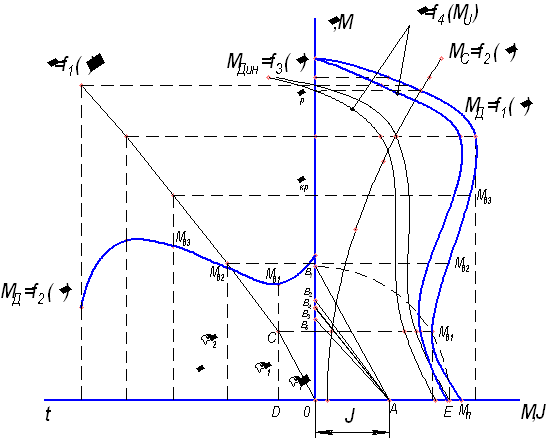
Рис. 2.1. Графическое решение уравнения движения электропривода
Рассчитывается приведенный момент инерции системы «электродвигатель - рабочая машина» относительно вала электродвигателя
 (2.11) (2.11)

где  - коэффициент, учитывающий момент инерции редуктора между электродвигателем и валом рабочей машины. - коэффициент, учитывающий момент инерции редуктора между электродвигателем и валом рабочей машины.
Используя построенные механические характеристики электродвигателя и рабочей машины , графически определяются значения динамического момента равные разности

График динамического момента разбивается на ряд участков по оси , для которых динамический момент можно принять постоянным. Точность тем выше, чем на большее число участков разделен график динамического момента.
Полученные на отдельных участках значения динамических моментов откладываются вверх по оси от начала координат (рис. 2.1). Так, для первого участка получается отрезок  . Точку . Точку  соединяют с точкой соединяют с точкой  , которая расположена от начала координат на расстоянии, равном в масштабе величине момента инерции системы . Параллельно , которая расположена от начала координат на расстоянии, равном в масштабе величине момента инерции системы . Параллельно  проводят прямую проводят прямую  из начала координат. Прямая характеризует искомую функцию из начала координат. Прямая характеризует искомую функцию  для первого интервала для первого интервала  . Полная продолжительность пуска равна сумме интервалов. Проведя аналогичное построение для всех последующих участков, по результирующей кривой определяется искомое время пуска привода . Полная продолжительность пуска равна сумме интервалов. Проведя аналогичное построение для всех последующих участков, по результирующей кривой определяется искомое время пуска привода  . .
Графоаналитическое решение уравнения движения электропривода
Используя построенные механические характеристики электродвигателя, рабочей машины и динамического (избыточного) момента, можно без построения функции аналитически рассчитать искомое время пуска привода .
Продолжительность разгона электропривода на каждом интервале частот вращения рассчитывают по выражению

Полная продолжительность пуска равна сумме частичных продолжительностей 

где  - средний динамический момент на - средний динамический момент на  участке характеристики, принимаемый постоянным,. участке характеристики, принимаемый постоянным,.
Проверка по допустимому времени разгона заключается в сравнении последнего с расчетным  . .
Допустимое время разгона находится в пределах 10-13 секунд.
Расчет потерь энергии при пуске и торможении
Потери энергии при пуске асинхронного электродвигателя определяются электрическими потерями энергии в его обмотках, которые прямо пропорциональны квадрату силы тока.
Потери энергии при пуске асинхронного электродвигателя с нагрузкой  рассчитываются по формуле рассчитываются по формуле
 (2.12) (2.12)

где  - продолжительность пуска электродвигателя, с; - продолжительность пуска электродвигателя, с;  - - кратность пускового тока асинхронного электродвигателя; - - кратность пускового тока асинхронного электродвигателя;  - коэффициент равный отношению постоянных потерь мощности двигателя к переменным. Принять - коэффициент равный отношению постоянных потерь мощности двигателя к переменным. Принять  . .
Потери энергии в асинхронном электродвигателе при пуске системы без нагрузки определяются по формуле
 (2.13) (2.13)

При торможении противовключением системы без нагрузки потери энергии (Дж) в асинхронном электродвигателе составят
 (2.14) (2.14)

Проверка устойчивой работы электропривода
Вращающий момент асинхронного электродвигателя для любой фиксированной скорости вращения пропорционален квадрату приложенного напряжения, поэтому для всех скоростей вращения справедливо соотношение
 (2.15) (2.15)

где  - вращающий момент асинхронного электродвигателя при номинальном напряжения, ; - вращающий момент асинхронного электродвигателя при номинальном напряжения, ;  - вращающий момент асинхронного электродвигателя при той же скорости вращения, но при пониженном напряжении, ; - вращающий момент асинхронного электродвигателя при той же скорости вращения, но при пониженном напряжении, ;  - относительная величина напряжения в долях от номинального. - относительная величина напряжения в долях от номинального.
|
0,000 |
20,944 |
80,762 |
98,960 |
 |
40,127 |
32,102 |
44,140 |
20,064 |
 |
36,598 |
27,180 |
19,894 |
-14,570 |
Для оценки возможности запуска электродвигателя с нагрузкой в случае снижения напряжения на  необходимо пересчитать вращающие моменты электродвигателя с учетом выражения необходимо пересчитать вращающие моменты электродвигателя с учетом выражения  . Построить зависимость при пониженном напряжении . Построить зависимость при пониженном напряжении  , совместив ее с механической характеристикой рабочей машины, приведенной к валу электродвигателя. , совместив ее с механической характеристикой рабочей машины, приведенной к валу электродвигателя.
Это позволит сделать заключение:
-электродвигатель не запустится;
-электродвигатель запустится;
-затяжной пуск электродвигателя;
-электродвигатель «застрянет» и не развернется до частоты вращения, соответствующей рабочей зоне его механической характеристики.
Двигатель запустится но будет работать с перегрузкой.
Снижение пускового тока путем введения дополнительного сопротивления в обмотку статора
Аналитический метод
Сопротивление короткого замыкания электродвигателя при прямом пуске
 (2.16) (2.16)

Активное сопротивление статора при коротком замыкании
 (2.17) (2.17)

Индуктивное сопротивление статора при коротком замыкания
 (2.18) (2.18)

Степень уменьшения пускового тока
 (2.19) (2.19)
Добавочное активное сопротивление
 (2.20) (2.20)

Добавочное индуктивное сопротивление
 (2.21) (2.21)

Графический метод
По величинам  и и  строится треугольник короткого замыкания при прямом пуске двигателя. Из точки (рис. 2.2) радиусом, равным в масштабе сопротивлению короткого замыкания двигателя при включении добавочных сопротивлений, т.е. строится треугольник короткого замыкания при прямом пуске двигателя. Из точки (рис. 2.2) радиусом, равным в масштабе сопротивлению короткого замыкания двигателя при включении добавочных сопротивлений, т.е.
 (2.22) (2.22)

на линии  делается засечка. Получим общее активное сопротивление цепи статора, равное , делается засечка. Получим общее активное сопротивление цепи статора, равное ,  . Тогда . Тогда  . Аналогичным образом определяется и . Аналогичным образом определяется и  . При этом тем же радиусом из точки делается засечка на линии . Следовательно, . При этом тем же радиусом из точки делается засечка на линии . Следовательно, 

Рис. 2.2 Определение добавочных сопротивлений цепи статора графическим методом
Задание № 3. Вариант 6
Линия загрузки кормов в кормораздатчик
При наличии корма в бункере 4 (рис. 3.1) и расположении кормораздатчиков 6 и 7 под окнами загрузки оператор может дать команду на включение линии загрузки кормов. Выполнение команды осуществляется в следующем порядке. Открывается заслонка 5, включаются скребковые транспортеры 2 и 3, а также шнек извлекатель 1. После загрузки кормораздатчика 6 закрывается заслонка 5 и корм поступает в кормораздатчик 7, и после его загрузки линия загрузки корма отключается.
Мощности электродвигателей
  
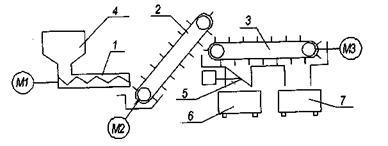
Рис. 3.1 Линия загрузки кормов в кормораздатчик
Описание работы схемы
Ставим переключатель SA в положение 2 автоматический режим, если SQ1 (следит за уровнем бункера) через SQ2 (заполнение кормораздатчика 7) замкнут бункер полный включается KL1 и шунтирует питание, получает питание КМ4 (заслонка) через SQ3 (заполнение кормораздатчика 6), одновременно получает питание KM2 (скребковый транспортер 2), замыкая свой контакт KM2.2 включая КМ3 (скребковый транспортер 3) в свою очередь замыкая свой контакт KM3.2 включает КМ1 (извлекатель 1)
После того как заполнился кормораздатчик 6 размыкает контакт SQ3 заслонка выкрывается, и корм поступает в кормораздатчик 7, после заполнения кормораздатчика 6 размыкает свой контакт SQ2 и вся линя отключается.
Если переключить SA в положение 1 ручной режим питание подается на кнопки управления схемы.

|