Содержание
Перечень условных обозначений, символов, единиц, сокращений и терминов
Введение
1 Теоретические основы разработки
1.1 Разработка микропроцессорной системы на основе микроконтроллера
1.2 Пульт дистанционного управления на ИК лучах
1.2.1 История дистанционного управления
1.2.2 Каналы связи для дистанционного управления
1.2.3 Устройство бытовых ПДУ
1.2.4 Принцип действия ПДУ
1.3 Протокол RC-5
2 Разработка ИК пульта и приемника дистанционного управления
2.1 Постановка задачи
2.2 Разработка структурной схемы устройства и функциональной спецификации
2.3 Аппаратные средства микроконтроллеров серии PIC12F629/675
2.4 Разработка функциональной схемы устройства
2.5 Разработка алгоритма управления
2.6 Разработка программного обеспечения микроконтроллера
2.7 Выбор, описание и расчеты элементной базы
2.8 Разработка схемы электрической принципиальной
3 Технико-экономическое обоснование объекта разработки
3.1 Расчет расходов на ПО, которое разрабатывается
3.2 Расчет расходов на создание ПО
3.3 Расчет стоимости разработки конструкторской документации и сборки устройства
3.4 Расчет расходов на стадии производства изделия
3.5 Анализ устройств-аналогов
4 Охрана труда
4.1 Требования к производственным помещениям
4.2 Эргономические требования к рабочему месту
4.3 Режим труда
4.4 Расчет освещенности
4.5. Расчет вентиляции
4.6 Расчет уровня шума
Выводы
Перечень ссылок
Приложения
Перечень условных обозначений, символов, единиц, сокращений и терминов
ИК – инфракрасный
ИКИ – инфракрасный излучатель
ИКП - инфракрасный приемник
ДУ – дистанционное управление
КПК – карманный персональный компьютер
МК – микроконтроллер
МПС – микропроцессорная система
ОЗУ – оперативное запоминающее устройство
ПДУ – пульт дистанционного управления
ПЗУ – постоянное запоминающее устройство
УФ – ультрафиолетовый
Введение
Микропроцессоры и производные от них — микроконтроллеры — являются широко распространенным и при этом незаметным элементом инфраструктуры современного общества, основанного на электронике и коммуникациях. Исследования, проведенные в 2008 году, показали, что в каждом доме незаметно для нас «живет» около 100 микроконтроллеров и микропроцессоров. Они присутствуют буквально всюду: в звуковых открытках, стиральных машинах, микроволновых печах, телевизорах, телефонах, персональных компьютерах и разных других устройствах. Даже в самом обыкновенном автомобиле скрывается более двадцати таких элементов, где они, в частности, контролируют состояние беспроводных датчиков давления в шинах и отображают критичные данные.
Каждый год продается около четырех миллиардов подобных изделий, предназначенных для реализации «мозгов» разнообразных «умных» устройств, начиная от интеллектуальных таймеров для яйцеварок и заканчивая системами управления самолетом. Эволюция микропроцессоров, первые из которых были выпущены компанией Intel в далеком 1971 году, привела к коренному изменению структуры общества, спровоцировав в начале XXI века вторую промышленную революцию. Несмотря на то что микропроцессоры, являясь основным компонентом вездесущих ПК, известны лучше, объем продаж различных микропроцессоров, таких как IntelPentium, составляет всего около 2% от общего объема продаж подобных устройств. Подавляющее же большинство продаж приходится на дешевые микроконтроллеры, встраиваемые в специализированные электронные устройства, такие как смарт-карты. Причем если основной задачей микропроцессоров является обеспечение собственно вычислительной мощности, то во втором случае акцент смещается в сторону объединения на одном кристалле центрального процессора, памяти и устройств ввода/вывода. Такая интегрированная вычислительная система называется микроконтроллером.
В современных телевизорах также применяются микроконтроллеры и в основном они применяются для дистанционного управления, регулировки на расстоянии переключением каналов, громкостью, яркостью и еще рядом других функций. Дистанционное управление перешло и на аудиотехнику. Сейчас промышленностью выпускается всевозможное множество систем дистанционного управления. Они отличаются по принципу, по сложности, объему выполняемых функций. Сейчас уже невозможно представить как бы выглядел пульт дистанционного управления телевизора, если бы он был собран на транзисторах, какую батарею питания пришлось бы носить с собой, чтобы питать этот пульт?
Тема дипломной работы – «Разработка ИК пульта и приемника дистанционного управления», которая будет являться предметом исследования.
Цель работы – разработать ИК пульт и приемник дистанционного управления для какого-либо устройства (управление освещением, двигателем, телевизором и т.д.), который бы отличался от выпускаемых промышленностью своей новизной и ценой.
Актуальность данной разработки огромная, т.к. каждый день почти каждый человек соприкасается с «ленивчиком», как его прозвали в народе.
Разработку пульта и приемника ИК управления разобъем на этапы:
- изучим теоретические вопросы связанные с разработкой устройств на микроконтроллерах, в частности с разработкой ИК пультов и приемников для дистанционного управления;
- практически разработаем схему ИК передатчика (пульта) и приемника для дистанционного управления устройством.
1 Теоретические основы разработки
1.1 Разработка микропроцессорной системы на основе микроконтроллера
Микропроцессорная система (МПС) на основе микроконтроллера (МК) используются чаще всего в качестве встроенных систем для решения задач управления некоторым объектом. Важной особенностью данного применения является работа в реальном времени, т.е. обеспечение реакции на внешние события в течение определенного временного интервала. Такие устройства получили название контроллеров.
Перед разработчиком МПС стоит задача реализации полного цикла проектирования, начиная от разработки алгоритма функционирования и заканчивая комплексными испытаниями в составе изделия. Методология проектирования контроллеров может быть представлена так, как показано на рис. 1.1.
В техническом задании формулируются требования к контроллеру с точки зрения реализации определенной функции управления. Техническое задание включает в себя набор требований, который определяет, что пользователь хочет от контроллера и что разрабатываемый прибор должен делать. Техническое задание может иметь вид текстового описания.
На основании требований пользователя составляется функциональная спецификация, которая определяет функции, выполняемые контроллером для пользователя после завершения проектирования, уточняя тем самым, насколько устройство соответствует предъявляемым требованиям. Она включает в себя описания форматов данных, как на входе, так и на выходе, а также внешние условия, управляющие действиями контроллера.

Рисунок 1.1- Основные этапы разработки контроллера
Этап разработки алгоритма управления является наиболее ответственным, поскольку ошибки данного этапа обычно обнаруживаются только при испытаниях законченного изделия и приводят к необходимости дорогостоящей переработки всего устройства. Разработка алгоритма обычно сводится к выбору одного из нескольких возможных вариантов алгоритмов, отличающихся соотношением объема программного обеспечения и аппаратных средств.
При этом необходимо исходить из того, что максимальное использование аппаратных средств упрощает разработку и обеспечивает высокое быстродействие контроллера в целом, но сопровождается, как правило, увеличением стоимости и потребляемой мощности.
При выборе типа МК учитываются следующие основные характеристики:
- разрядность;
- быстродействие;
- набор команд и способов адресации;
- требования к источнику питания и потребляемая мощность в различных режимах;
- объем ПЗУ программ и ОЗУ данных;
- возможности расширения памяти программ и данных;
- наличие и возможности периферийных устройств, включая средства поддержки работы в реальном времени (таймеры, процессоры событий и т.п.);
- возможность перепрограммирования в составе устройства;
- наличие и надежность средств защиты внутренней информации;
- стоимость;
- наличие и доступность эффективных средств программирования и отладки МК;
- доступность возможности замены изделиями других фирм.
Список этот не является исчерпывающим.
Номенклатура выпускаемых в настоящее время МК исчисляется тысячами типов изделий различных фирм. Современная стратегия модульного проектирования обеспечивает потребителя разнообразием моделей МК с одним и тем же процессорным ядром. Такое структурное разнообразие открывает перед разработчиком возможность выбора оптимального МК, не имеющего функциональной избыточности, что минимизирует стоимость комплектующих элементов.
1.2 Пульт дистанционного управления на ИК лучах
Пульт ДУ (ПДУ, пульт дистанционного управления, RCU, remote control unit) — электронное устройство для удалённого (дистанционного) управления другим электронным устройством на расстоянии. Существуют как в автономном, так и в (гораздо реже) неавтономном (проводном) вариантах. Конструктивно — обычно небольшая коробка, содержащая в себе электронную схему, кнопки управления и источник автономного питания.
ПДУ применяются для управления системами и механизмами на мобильных объектах (самолёты, космические корабли, суда и т. д.), управления производственными процессами, системами связи, военными объектами. Также широко используются для дистанционного управления телевизорами, музыкальными центрами, аудио- и видеопроигрывателями, другой бытовой электронной аппаратурой (посылка команд переключения телеканалов, звуковых дорожек, управления громкостью и т. п.). Бытовой ПДУ представляет собой небольшое устройство с кнопками, питающееся от батареек и посылающее команды посредством инфракрасного излучения. Большинство образцов современной бытовой электроники содержат ограниченный набор средств управления на своем корпусе и полный набор на пульте ДУ.
Своеобразные пульты ДУ бывают у автомобильных сигнализаций и некоторых цифровых фотоаппаратов. Бывают также пульты ДУ для управления роботами, авиамоделями и др.(Рисунок 1.2).

Рисунок 1.2 - Различные пульты для бытовых приборов
1.2.1 История дистанционного управления
Один из самых ранних образцов устройств для дистанционного управления придумал и запатентовал Никола Тесла в 1893 году.
В 1903 году испанский инженер и математик Leonardo Torres Quevedo представил в Парижской академии наук Telekino — устройство, представлявшее собой робота, выполняющего команды, переданные посредством электромагнитных волн. В том же году он получил патенты во Франции, Испании, Великобритании и США. В 1906 году в порту Бильбао в присутствии короля и большого сборища зрителей Torres представил своё изобретение, управляя лодкой с корабля. Позже он пробовал приспособить Telekino для снарядов и торпед, но прекратил проект из-за недостатка средств.
Первая дистанционно управляемая модель аэроплана была запущена в 1932 году. Затем над использованием дистанционного управления в военных целях усиленно работали во время Второй мировой войне, например в проекте немецкой ракеты земля-воздух Вассерфаль.
Первый пульт ДУ для управления телевизором был разработан американской компанией Zenith Radio Corporation в начала 1950-х. Он был соединён с телевизором кабелем. В 1955 году был разработан беспроводной пульт Flashmatic, основанный на посылании луча света в направлении фотоэлемента. К сожалению, фотоэлемент не мог отличить свет из пульта от света из других источников. Кроме того, требовалось направлять пульт точно на приёмник.
В 1956 году американец австрийского происхождения Роберт Адлер разработал беспроводной пульт Zenith Space Commander. Он был механическим и использовал ультразвук для задания канала и громкости. Когда пользователь нажимал кнопку, она щёлкала и ударяла пластину. Каждая пластина извлекала шум разной частоты и схемы телевизора распознавали этот шум. Изобретение транзистора сделало возможным производство дешёвых электрических пультов, которые содержат пьезоэлектрический кристалл, питающийся электрическим током и колеблющийся с частотой, превышающей верхний предел слуха человека (хотя слышимой собаками). Приёмник содержал микрофон, подсоединённый к схеме, настроенной на ту же частоту. Некоторыми проблемами этого способа были возможность приёмника сработать от естественного шума и то, что некоторые люди, особенно молодые женщины, могли слышать пронзительные ультразвуковые сигналы. Был даже случай, когда игрушечный ксилофон мог переключать каналы на телевизорах этого типа, потому что некоторые обертоны ксилофона совпадали по частоте с сигналами пульта.
В 1974 г. фирмы GRUNDIG и MAGNAVOX выпустили первый цветной телевизор с микропроцессором управления на ИК-лучах. Телевизор имел экранную индикацию (OSD) — в углу экрана отображался номера канала.
Толчок к появлению более сложных типов пультов ДУ появился в конце 1970-х, когда компанией Би-би-си был разработан телетекст. Большинство продаваемых пультов ДУ в то время имели ограниченный набор функций, иногда только четыре: следующий канал, предыдущий канал, увеличить или уменьшить громкость. Эти пульты не отвечали нуждам телетекста, где страницы были пронумерованы трёхзначными числами. Пульт, позволяющий выбирать страницу телетекста, должен был иметь кнопки для цифр от 0 до 9, другие управляющие кнопки, например для переключения между текстом и изображением, а также обычные телевизионные кнопки для громкости, каналов, яркости, цветности. Первые телевизоры с телетекстом имели проводные пульты для выбора страниц телетекста, но рост использования телетекста показал необходимость в беспроводных устройствах. И инженеры Би-Би-Си начали переговоры с производителями телевизоров, что привело в 1977—1978 к появлению опытных образцов, имевших гораздо больший набор функций. Одной из компаний была ITT, её именем был позже назван протокол инфракрасной связи.
В 1980-х Стивен Возняк из компании Apple основал компанию CL9. Целью компании было создание пульта ДУ, который мог бы управлять несколькими электронными устройствами. Осенью 1987 года был был представлен модуль CORE. Его преимуществом была возможность «обучаться» сигналам от разных устройств. Он также имел возможность выполнять определённые функции в назначенное время благодаря встроенным часам. Так же это был первый пульт, который мог быть подключён к компьютеру и загружен обновлённым программным кодом. CORE не оказал большого влияния на рынок. Для среднего пользователя было слишком сложно программировать его, но он получил восторженные отзывы от людей, которые смогли разобраться с его программированием. Названные препятствия привели к роспуску CL9, но один из её работников продолжил дело под маркой Celadon.
К началу 2000-х количество бытовых электроприборов резко возросло. Для управления домашним кинотеатром может потребоваться пять—шесть пультов: от спутникового приёмника, видео-магнитофона, DVD-проигрывателя, телевизионного и звукового усилителя. Некоторые из них требуется использовать друг за другом, и, из-за разобщённости систем управления, это становится обременительным. Многие специалисты, включая известного специалиста и изобретателя современного пульта ДУ Роберта Адлера, отмечают сколь запутанно и неуклюже использование нескольких пультов.
Появление КПК с инфракрасным портом позволило создавать универсальные пульты ДУ с программируемым управлением. Однако в силу высокой стоимости этот метод не стал слишком распространён. Не стали широко распространёнными и специальные универсальные обучаемые пульты управления в силу относительной сложности программирования и использования. Так же возможно использование некоторых мобильных телефонов для дистанционного управления (по какналу Bluetooth) персональным компьютером.
1.2.2 Каналы связи для дистанционного управления
- Проводной канал — используется там, где нет возможности применить беспроводные каналы, например, из-за отсутствия прямой видимости, наличия экранировки, соображений секретности и т. д., главным образом для управления системами мобильных объектов, оборудованием производственных объектов, лабораторий, или специальных объектов (военного и другого назначения)
- Радиоканал — используется, главным образом, для управления мобильными объектами — радиоуправляемыми спортивными моделями и игрушками, оборудованием для чрезвычайных ситуаций (роботы и т. д.), беспилотными летательными аппаратами, военными мобильными объектами
- Ультразвуковой канал — используется редко, для управления мобильными и стационарными объектами на сравнительно небольшом расстоянии
- Инфракрасный канал — используется, как правило, для бытовой электроники
1.2.3 Устройство бытовых ПДУ
Модуляция инфракрасного светодиода изменяется в зависимости от нажатой кнопки.
Большинство пультов ДУ для электроники используют светодиод, испускающий пучок инфракрасного излучения с длиной волны 0,75—1,4 микрон, который достигнет устройства. Этот свет невидим для человеческого глаза, но распознаётся устройством, так же как и матрицей цифрового фотоаппарата или видеокамеры. В основе большинства пультов дистанционного управления обычно лежит одна бескорпусная микросхема помещенная прямо на печатную плату. Сверху микросхема покрыта компаундом, что предотвращает её повреждение.
1.2.4 Принцип действия ПДУ
Для одноканального (с одной функцией, с одной кнопкой) пульта достаточно наличия сигнала, чтобы передать команду. Для пультов с несколькими функциями необходима более сложная система: частотная модуляция несущего сигнала. После демодуляции полученного сигнала, применяются соответствующие частотные фильтры для разделения сигналов. Сейчас чаще всего используется цифровая обработка сигналов. Часто можно услышать сигналы, модулируемые на инфракрасном несущем, используя пульт ДУ рядом со средневолновым радиоприёмником не настроенным на станцию.
Для считывания кода нажатой кнопки обычно применяется метод активного сканирования линий (как например в компьютерных клавиатурах), но в пультах ДУ бытовой техники использование такого метода требовало бы затрат энергии и батарейки бы быстро садились. Поэтому в них используется метод «одна кнопка — одна линия». При нажатии на кнопку пульта соединяются общая линия и линия этой кнопки, вследствие чего поступающий сигнал «будит» микросхему пульта, она определяет код нажатой кнопки и формирует посылку, содержащую код пульта и код кнопки. Пульты ДУ не имеют обратной связи, это означает что пульт не может определить достиг ли сигнал приёмника или нет. Потому сигнал, соответствующий нажатой кнопке передаётся непрерывно до тех пор пока кнопка не будет отпущена. При отпускании кнопки пульт переходит обратно в выключенное состояние.
На приёмной стороне (например в телевизоре) принимаются данные, проверяется код пульта, и, если этот код соответствует заданному, выполняется команда, соответствующая нажатой кнопке. Приёмник может оказаться неспособен принять и обработать посланные ему данные в случае несовместимости с пультом.
Причинами могут быть:
- Используются разные методы кодирования передаваемых данных.
- Используются разные частоты модуляции инфракрасного сигнала.
Обычно в пультах используется одна частота модуляции. На неё настроен пульт и приёмник. Частоты модуляции обычно «стандартны» — это 36 кГц, 38 кГц, 40кГц (Panasonic, Sony). Редкими считаются частоты 56 кГц (Sharp). Фирма Bang & Olufsen использует 455 кГц, что является большой редкостью.
Для частот от 30 до 50 кГц обычно используются светодиоды с длиной волны 950 нм, а для 455 кГц используются светодиоды с длиной волны 870нм.
Модуляция
Передача сигнала осуществляется мерцанием светодиода с соответствующей частотой. Несколько таких модулированных передач и гашений формируют кодированную посылку. Приёмники ИК сигнала в своём составе обычно имеют частотный детектор (или подобную схему) детектирующую наличие или отсутствие мерцания заданной частоты.
Практически все ИК приёмники производимые серийно имеют ИК светофильтр (и выглядят тёмными). Встроенная схема состоящая из нескольких каскадов усилителей и демодулятора (частотного детектора) чувствительна к сигналу до −90 дБ (большинство радиолюбительских схем имеют чувствительность до −60 дБ). Также практически все ИК приёмники имеют всего три вывода: Питание, Земля, Выход данных (показывающий наличие или отсутствие модулированного сигнала на входе фото приёмника. Использование приёмника не совпадающей с частотой модуляции пульта не означает что он не будет принимать. Он будет принимать, но его чувствительность может очень сильно упасть. Для приёма сигнала от пульта ДУ также существует демодулятор без встроенного ИК фото приёмника — микросхема фирмы Sony CXA1511l, по своей сути — высококачественный частотный детектор, позволяющий сделать пульт например не на светодиодах ИК диапазона а на УФ.
Методы кодирования данных
Сейчас преимущественно используются следующие две схемы кодирования передаваемых данных:
- Первая в пультах ДУ стала применяться фирмой Philips (протокол RC5): Передача 0 дополнялась единицей, а передача 1 — нулём. То есть 001 передавалась бы как 01 01 10. Соответственно посылка считывается последовательно, и в эфир подаётся модулированный сигнал только когда встречается единица.
- Авторство второй схемы кодирования приписывается фирме Sony. Сначала всегда передаётся «1» модулированным сигналом, а потом «0» пауза. Временной размер единицы всегда одинаковый, а временной размер 0 — это кодированные передаваемые данные. Длинная пауза — передача единицы, короткая пауза — передача нуля.
Перед посылкой кодированных данных пульт всегда посылает одну или несколько синхропосылок для того, чтобы фото приёмник настроил приёмную цепь (синхронизировался с пультом по чувствительности и фазе).
Производители пультов не склонны придерживаться каких-либо общих стандартных протоколов кодирования данных и вправе разрабатывать и применять для своей техники всё новые и новые протоколы. Более полный список протоколов: NEC (repetitive pulse), NEC (repetitive data), RC5, RC6, RCMM, RECS-80, R-2000 (33 kHz), Thomson RCA (56.7 kHz), Toshiba Micom Format (similar NEC), Sony 12 Bit, Sony 15 Bit, Sony 20 Bit, Kaseikyo Matsushita (36.7 kHz), Mitsubishi (38 kHz, preburst 8 ms, 16 bit), Ruwido r-map, Ruwido r-step, Continuous transmission 4000 bps и Continuous transmission 1000 bps.
Питание
Бытовые пульты ДУ обычно питаются от двух батареек типоразмера AA или AAA. Это связано с тем, что для питания инфракрасного светодиода необходимо не менее 2,0—2,5 Вольт, а от одной батареи 1,3 В такого напряжения не получить (без использования изощрённых схемотехнических способов).
1.3 Протокол RC-5
При проектировании ИК пульта и приемника для дистанционного управления мы будем использовать протокол RC-5, поэтому кратко рассмотрим, что это такое и как оно работает.
В протоколе RC5, тут кодирование информации осуществляется не длительностью импульса. Такой способ кодирования информации называется еще манчестерским. RC5 посылка на выходе интегрального приёмника TSOP36 , который на выходе фильтрует несущую частоту 36кГц (Рис.1.3):

Рисунок 1.3 – Временное распределение протокола RC-5
Длительность посылки в протоколе RC5 составляет - 24.9мс, а период повторения - 114мс. Посылка состоит из 14бит. Первые два бита в посылке (S1 и S2) это стартовые биты они всегда должны быть равны 1. Третий бит (Т) это бит триггера, он меняет состояние каждый раз, когда на пульте нажимается кнопка. Служит для отличия многократного нажатия кнопки на пульте. После бита триггера идут 5 бит адреса устройства. Далее идут 6 бит самой команды.
Протокол передачи данных RC-5 имеет следующий формат (Рис.1.4):
Команды передаются пакетами. Каждый пакет содержит 14 бит:
SB (start bit) - два стартовых бита (всегда равны 1)
TB (toggle bit) - управляющий бит. Используется как признак нового нажатия. (Если удерживать кнопку пульта нажатой, то в первом пакете этот бит будет равен 1, а в последующих 0).
S4, S3, S2, S1, S0 (system bits) - пять битов адреса, определяющих номер системы, для которой данный пакет предназначен.
C5, C4, C3, C2, C1, C0 (command bits) - собственно биты, кодирующие определенную команду.
Длина одного пакета составляет 24,889 миллисекунд. Минимальная пауза между пакетами равна по длине 50 битам (88,889 миллисекунд) (Рис.1.5)

Рисунок 1.4 - Формат протокола передачи данных RC-5

Рисунок 1.5 – Временные интервалы передачи сигналов протокола RC-5
2 Разработка ИК пульта и приемника дистанционного управления
2.1 Постановка задачи
Требуется разработать ИК пульт и приемник дистанционного управления.
Разработка устройства будет производиться с учётом следующих требований:
- простота схемы (минимальное количество компонентов);
- функциональная насыщенность, многообразие регулируемых параметров;
- устойчивость к изменениям напряжения, долговечность;
- производить управление минимум четырех функций;
- низкое энергопотребление.
2.2 Разработка структурной схемы устройства и функциональной
спецификации
Разработаем структурную схему ИК пульта (Рисунок 2.1) и приемника (Рисунок 2.2) дистанционного управления.
Функциональная спецификация ИК пульта дистанционного управления:
1.Входы:
а. 4 кнопки выбора функций (SВ1-SВ4);
b. Электропитание МК.
SB1

    SB2 SB2
   SB3 SB3
 SB4 SB4
Рисунок 2.1 – Структурная схема ИК пульта дистанционного управления
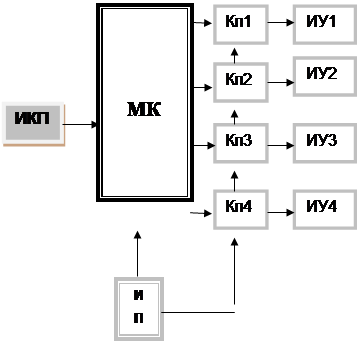
Рисунок 2.2 – Структурная схема ИК приемника дистанционного управления
2.Выходы:
а. ИК излучатель.
3.Функции:
а. Запись кодированного сигнала в память, при нажатии на одну из кнопок SВ1-SВ4;
b.Вывод кодированной информации на ИКИ (инфрокрасный излучатель) с МК;
c.Осуществление электропитания МК от внутреннего источника питания (ИП).
Функциональная спецификация ИК приемника дистанционного управления:
1.Входы:
а. Передача в МК закодированных сигналов от ИКП (ИК приемника)
b. Электропитание МК и ключей управления (Кл1-Кл4).
2. Выходы:
а. Сигнал управления от МК на соответствующий ключ (Кл1-Кл4);
b. Подача импульсов управления от ключа на исполнительные устройства (ИУ1-ИУ4).
3. Функции:
а. Прием ИКП закодированных сигналов и передача их на вход МК;
b.МК раскодировав сигналы передает импульсы управления на ключи Кл1-Кл4;
с. При срабатывании определенного ключа напряжение питания подается на исполнительные устройства (светодиоды, реле, лампы накаливания и т.д.);
d.Электропитание МК и ключей осуществляется либо от автономного источника питания, либо от селевого (ИП).
2.3 Аппаратные средства микроконтроллеров серии
PIC
12
F
629/675
Для разработки ИК пульта и приемника дистанционного управления выберем микроконтроллер PIC12F629. Чем выгоден данный микроконтроллер и почему именно его мы выбираем? Во-первых, он миниатюрен в исполнении, во-вторых- потребляет малый ток, последнее - отличается сравнительно невысокой ценой.
Основные параметры микроконтроллеров PIC12F629/675 приведены ниже и в Приложении А.
PIC12F629/675-8 - выводные Flash КМОП микроконтроллеры.
Характеристика микроконтроллеров:
• Высокопроизводительная RISC архитектура
• 35 команд
• Все команды выполняются за один цикл, кроме команд переходов, выполняемых за два цикла
• Тактовая частота:
DC - 20МГц, частота тактового сигнала
- DC - 200нс, длительность машинного цикла
• Память:
1024 х 14 слов Flash памяти программ
64 х 8 память данных
128 х 8 EEPROM памяти данных
• Система прерываний
• 16 аппаратных регистров специального назначения
• 8-уровневый аппаратный стек
• Прямой, косвенный и относительный режим адресации
Характеристика периферийных модулей
• 6 каналов ввода/вывода с индивидуальной настройкой направления данных
• Высокотоковые выводы для непосредственного подключения светодиодов
• Модуль аналогового компаратора:
Один аналоговый компаратор Программируемый источник опорного напряжения для компаратора (CVref) Программируемый мультиплексируемый вход с другими периферийными модулями Внешний выход компаратора
• Модуль АЦП (только в PIC12F675)
Разрешение 10 бит
- Программный выбор одного из четырех аналоговых входов
- Вход опорного напряжения
• Таймер TMR0 - 8-разрядный таймер/счетчик с 8-разрядным программируемым предделителем
• Таймер TMR1
16-разрядный таймер/счетчик с предделителем Вход включения таймера
- Возможность использования OSC1, OSC2 в качестве выводов генератора TMR1 в LP режиме, если основной тактовый генератор работает в INTOSC режиме
• 64 регистра общего назначения (ОЗУ)
Дополнительные особенности:
• Сброс по включению питания (POR) Таймер сброса (PWRT) и таймер ожидания запуска генератора (OST)
• Сброс по снижению напряжения питания (BOD) Сторожевой таймер WDT с собственным RC генератором
• Мультиплексируемый вывод -MCLR
• Прерывания по изменению уровня сигнала на входах
• Индивидуально пpoграммируемые длякаждоговхода подтягивающие резисторы Программируемая защита кода
• Режим пониженного энергопотребления SLEEP Выбор режима работы тактового генератора:
- RC - внешний RC генератор
- INTOSC - внутренний RC генератор 4МГц
- ЕС - вход внешнего тактового сигнала
- XT - стандартный кварцевый/керамический резонатор
- HS - высокочастотный кварцевый/керамический резонатор
- LP - низкочастотный кварцевый резонатор (пониженное энергопотребление)
• Внутрисхемное программирование ICSP с использованием двух выводов
• Четыре пользовательских ID ячейки
КМОП технология
• Высокоскоростная КМОП Flash технология с малым энергопотреблением
• Полностью статическая архитектура
• Широкий диапазон напряжений питания от 2.0В до 5.5В
• Промышленный и расширенный температурные диапазоны
• Малое энергопотребление:
- <1.0мА @ 5.5В, 4МГц
- 20мкА (тип) @ 2.0В, 32кГц
- <1 мкА (тип) в режиме SLEEP @ 2.0В
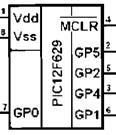
Расположение выводов (Рисунок 2.3).
Структурная схема микроконтроллеров PIC12F629/675 (Рисунок 2.4).
Оба микроконтроллера идентичны за исключением наличия в PIC12F675 10-разрядного АЦП. Микроконтроллеры упаковываются в 8-выводные корпуса DIP, SOIC и MLF.Назначение выводов микроконтроллеров в таблице 2.1.

Рисунок 2.3 – Расположение выводов микроконтроллеров PIC12F629/675
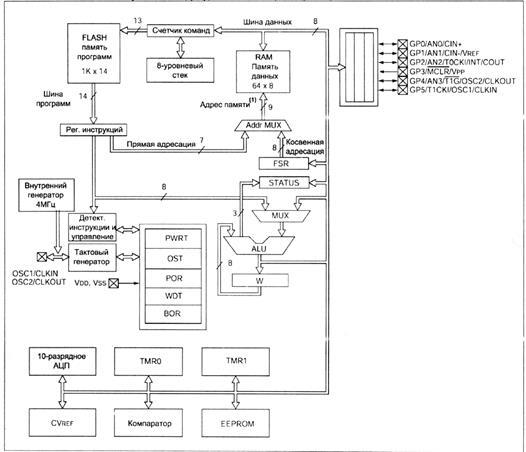
Рисунок 2.4 - Структурная схема микроконтроллеров PIC12F629/675
Таблица 2.1 - Назначение выводов микроконтроллеров PIC12F629/675
| Обозначение |
Функция |
Тип входа |
Тип выхода |
Описание |
| GP0/AN0/CIN+/ICSP DAT |
GPO |
TTL |
CMOS |
Двунаправленный канал ввода/вывода с программируемым подтягивающим резистором и прерыванием по изменению входного сигнала |
| ANO |
AN |
Аналоговый вход 0 АЦП (только в PIC12F675) |
| CIN+ |
AN |
Вход компаратора |
| ICSPDAT |
TTL |
CMOS |
Вывод данных при программировании |
| GP1/AN1/CIN-/VREF
/ ICSPCLK |
GP1 |
ST |
CMOS |
Двунаправленный канал ввода/вывода с программируемым подтягивающим резистором и прерыванием по изменению входного сигнала |
| AN1 |
AN |
Аналоговый вход 1 АЦП (только в PIC12F675) |
| CIN- |
AN |
Вход компаратора |
| Vref |
AN |
Вход опорного напряжения (только в PIC12F675) |
| ICSPCLK |
ST |
Вход тактового сигнала при программировании |
| GP2/AN2/T0CKI/INT/COUT |
GP2 |
ST |
CMOS |
Двунаправленный канал ввода/вывода с программируемым подтягивающим резистором и прерыванием по изменению входною сиінала |
| AN2 |
AN |
Аналоговый вход 2 АЦП (только в PIC12F675) |
| TOCKI |
ST |
Вход тактового сигнала для TMR0 |
| INT |
ST |
Вход внешних прерываний |
| COUT |
CMOS |
Выход компаратора |
| GP3 |
TTL |
Вход порта с программируемым подтягивающим резистором и прерыванием по изменению входного сигнала |
| -MCLR |
ST |
Вход сброса |
| Vpp |
HV |
Напряжение программирования |
| GP4/AN3/-T1G/OSC2/ CLKOUT |
GP4 |
TTL |
CMOS |
Двунаправленный канал ввода/вывода с программируемым подтягивающим резистором и прерыванием по изменению входного сигнала |
| AN3 |
AN |
Аналоговый вход 3 АЦП (только в PIC12F675) |
| -T1G |
ST |
Вход включенияTMR1 |
| OSC2 |
XTAL |
Вывод для подключения кварцевого/ керамического резонатора |
| CLKOUT |
CMOS |
Выход Fosc/4 |
| GP5/T1CKI/OSC1/CLKIN |
GP5 |
TTL |
CMOS |
Двунаправленный канал ввода/вывода с программируемым подтягивающим резистором и
прерыванием по изменению входного сигнала
|
| T1CKI |
ST |
Вход тактового сигнала для TMR1 |
| OSC1 |
XTAL |
Вывод для подключения кварцевого/ керамического резонатора |
| CLKIN |
ST |
Внешний тактовый сигнал/ внешняя RCцепочка |
| Vss |
Vss |
Питание |
Общий вывод |
| Vdd |
Vdd |
Питание |
Напряжение питания |
Особенности микроконтроллеров PIC12F629/675:
В настоящее время устройства, работающие в режиме реального времени часто содержат микроконтроллер как основной элемент схемы. PIC12F629/675 имеют много усовершенствований повышающие надежность системы, снижающие стоимость устройства и число внешних компонентов. Микроконтроллеры PIC12F629/675 имеют режимы энергосбережения и возможность защиты кода программы.
Основные достоинства:
• Выбор тактового генератора
• Сброс:
- сброс по включению питания (POR)
- таймер включения питания (PWRT)
- таймер запуска генератора (OSC)
- сброс по снижению напряжения питания (BOR)
• Прерывания
• Сторожевой таймер (WDT)
• Режим энергосбережения (SLEEP)
• Защита кода программы
• Область памяти для идентификатора
• Внутрисхемное программирование по последовательному порту (ICSP)
В микроконтроллеры PIC12F629/675 встроен сторожевой таймер WDT, который может быть выключен только в битах конфигурации микроконтроллера. Для повышения надежности сторожевой таймер WDT имеет собственный RC генератор. Дополнительных два таймера выполняют задержку старта работы микроконтроллера. Первый, таймер запуска генератора (OST), удерживает микроконтроллер в состоянии сброса, пока не стабилизируется частота тактового генератора. Второй, таймер включения питания (PWRT), срабатывается после включения питания и удерживает микроконтроллер в состоянии сброса в течение 72мс (типовое значение), пока не стабилизируется напряжение питания. В большинстве приложений эти функции микроконтроллера позволяют исключить внешние схемы сброса.
Режим SLEEP предназначен для обеспечения сверхнизкого энергопотребления. Микроконтроллер может выйти из режима SLEEP по сигналу внешнего сброса, по переполнению сторожевого таймера или при возникновении прерываний.
Выбор режима работы тактового генератора дает возможность использовать микроконтроллеры в различных приложениях. Режим тактового генератора RC позволяет уменьшить стоимость устройства, а режим LP снизить энергопотребление. Битами конфигурации устанавливается режим работы микроконтроллера.
Общий вид контролера приведен на рисунке 2.5.

Рисунок 2.5 – Общий вид микроконтроллеров PIC12F629/675
2.4 Разработка функциональной схемы устройства
После выбора типа микроконтроллера разработаем функциональные схемы ИК пульта и приемника дистанционного управления (Рис. 2.6 и 2.7).
  + 2,5-5,0В МК SB1-SB4 + 2,5-5,0В МК SB1-SB4
Рисунок 2.6 – Функциональная схема ИК пульта дистанционного управления
    +5 В МК +5 В МК
Рисунок 2.7 – Функциональная схема ИК приемника дистанционного управления
Условные обозначения (Рисунок 2.6 – 2.7):
СУ – схема управления; ИКП – инфракрасный приемник;
ИП – источник питания; ИКИ – инфракрасный излучатель;
КЛ1-КЛ4 – ключи; SB1-SB4 – кнопки управления.
2.5 Разработка алгоритма управления
Алгоритм работы ИК пульта дистанционного управления (Рисунок 2.8):
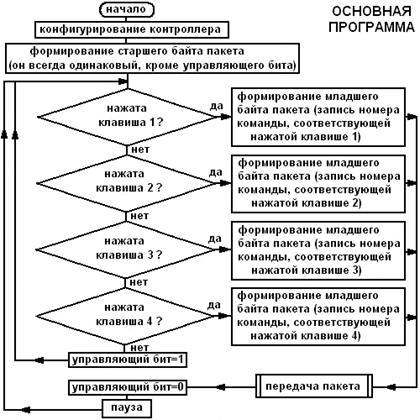
Рисунок 2.8 – Основная программа работы ИК пульта дистанционного управления
Алгоритм передачи пакета ИК пультом дистанционного управления изобразим на рисунке 2.9.

Рисунок 2.9 - Алгоритм передачи пакета ИК пультом
дистанционного управления
Алгоритм работы ИК приемника дистанционного управления изображен на рисунке 2.10, а алгоритм программы обработки прерывания ИК приемника дистанционного управления на рисунке 2.11.
Основные идеи алгоритма:
1) Выход ILMS1836 - инвертированный, т.е. когда принимается "1" - на выходе фотоприемника "0" (низкий уровень), когда приема нет или принимается "0" - на выходе фотоприемника "1"(высокий уровень).
2) Стартовый бит манчестерским кодом передается как последовательность "01", но первый полубит ("0") мы не отличим от отсутствия сигнала, т.е. фактически прием начинается со второго полубита.
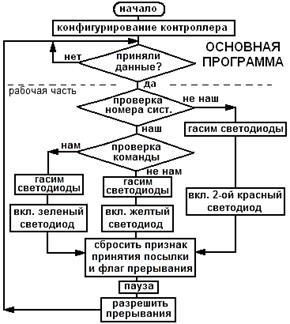
Рисунок 2.10 – Основная программа работы ИК приемника
дистанционного управления
3) В процессе работы программа считывает значение на входе контроллера каждые 889 мкс и считает это значение - значением принятого полубита.
4) Программа уходит в прерывание очень быстро - за несколько микросекунд, поэтому, чтобы читать значения подальше от границы полубитов, перед приемом первого полубита вводится пауза, примерно равная половине полубита.
5) Для проверки на соответствие манчестерскому алгоритму используется следующее его свойство: никакие три последовательных полубита не могут быть одновременно нулями или единицами.
6) Если записывать все четные полубиты, начиная со второго, то мы восстановим исходную посылку.
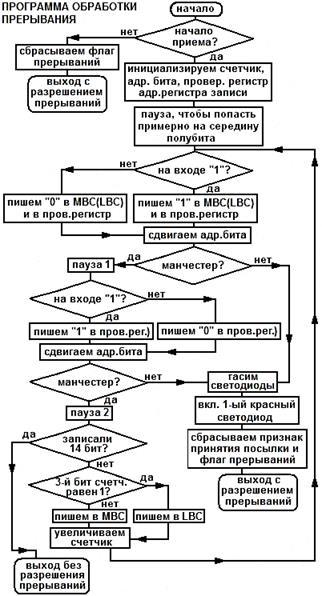
Рисунок 2.11 – Алгоритм программы обработки прерывания ИК приемника дистанционного управления
Четные полубиты - записываем и используем для проверки на соответствие манчестерскому алгоритму, нечетные - используем только для проверки на соответствие манчестерскому алгоритму.
2.6 Разработка программного обеспечения микроконтролл
ера
Прежде чем разбираться с программой, нужно посмотреть описание протокола RC-5 (Раздел 1.3 проекта).
Программа прошивки микроконтроллера PIC12F629 для ИК пульта дистанционного управления приведена в Приложении Б.
Итак, пусть в аппаратной части мы имеем:
входы: GP5 - кнопка SB1, GP2 - кнопка SB2, GP4 - кнопка SB3, GP1 - кнопка SB4
выходы: GP0 - вывод информации по протоколу RC-5.
MCLR внешне подтянут к питанию; используется внутренний генератор.
Пусть мы планируем управлять светом, то есть номер системы будет 29.
Программа (в данной программе частота несущей 36 кГц, )
Программа прошивки микроконтроллера PIC12F629 для ИК приемника дистанционного управления приведена в Приложении В.
Программа реализует следующие функции:
1) Подпрограмма обработки прерывания проверяет принимаемый код на соответствие манчестерскому алгоритму, декодирует принятый код и записывает его в 2 байта:
MBC - 7,6 биты - стартовые;
5 - управляющий бит;
4...0 - биты номера системы
LBC - 7...2 биты - номер команды;
1,0 биты - не используются если принимаемый код не манчестерский - загорается первый светодиод.
2) В рабочей части программы реализуется управление тремя оставшимися светодиодами: если номер системы в принятом коде не тот, который мы ждали - загорается второй светодиод, если номер системы совпадает с ожидаемым, но номер команды не совпадает с ожидаемым - загорается третий светодиод, и, наконец, если и номер системы и номер команды совпадают с ожидаемыми - загорается четвертый светодиод.
2.7 Выбор, описание и расчеты элементной базы
Для ИК пульта нам понадобятся: контроллер PIC12F629, ИК-светодиод, транзистор КТ315, два конденсатора (электролитический 100мкФх10В и керамический 0,1мкФ), четыре кнопки и семь резисторов. Для питания схемы подойдут две батарейки по 1,5В. Транзистор VT1, в принципе, почти любой. На нем реализован транзисторный ключ, который обеспечивает большой импульсный ток через ИК-светодиод. Если мы будем использовать другой транзистор – нужно подобрать R3 так, чтобы транзистор полностью открывался, но при этом порт GP0 не сгорел. Ток через ИК-светодиод можно увеличивать(уменьшать), уменьшая(увеличивая) номинал резистора R2, соответственно, будет увеличиваться (уменьшаться) дальнодействие пульта (Приложение Д). Можно использовать SMD резисторы и кнопки ПКН-150-1 (которые в изобилии встречаются в старой советской технике).
Для ИК приемника - контроллер PIC12F629, интегральный фотоприемник, четыре транзистора, четыре светодиода, несколько резисторов и конденсаторов. Для питания схемы необходимо стабильное питание +5В.
ILMS5360 - интегральный фотоприемник на частоту несущей 36 кГц (если на входе импульсы 36кГц - на выходе низкий уровень, если нет импульсов - высокий уровень). Транзисторы VT1, VT2, VT3, VT4 - любые маломощные (для светодиодов) или среднемощные (для реле) транзисторы. На них реализованы транзисторные ключи. Токи базы задаются резисторами R2, R3, R4, R5. Токи через светодиоды (яркость) можно регулировать резисторами R6, R7, R8, R9 (при указанных на схеме номиналах - токи светодиодов около 2 мА). С1 – электролитический 100мкФ х 10В, С2 - керамический 0,1 мкФ.
Схемы питаются низкими напряжениями, поэтому особых претензий по выбору элементной базы нет.
Спецификация элементной базы ИК пульта дистанционного управления приведена в Приложении Ж.
Спецификация элементной базы ИК приемника дистанционного управления приведена в Приложении К.
2.8 Разработка схемы электрической принципиальной
Принципиальная схема ИК пульта (Рисунок 2.12) и ИК приемника (Рисунок 2.13) дистанционного управления выполнена в САПР AccelEda.

Рисунок 2.12 - Принципиальная схема ИК пульта в AccelEDA
В ИК приемнике дистанционного управления можно организовать срабатывание от определенной команды определенного выхода микроконтроллера, а можно передавать декодированные команды по какому либо интерфейсу в другие устройства или на компьютер. В данном случае, показан вариант, в котором, в зависимости от четырех определенных команд, полученных контроллером, загораются четыре различных светодиода (вместо светодиодов можно подключить, например реле, только нужно пересчитать выходную часть, в зависимости от потребляемого обмотками реле тока).

Рисунок 2.13 - Принципиальная схема ИК пульта дистанционного управления в AccelEDA
3 Технико-экономическое обоснование объекта разработки
В данном разделе проводится технико-экономический расчет стоимости ИК пульта и ИК приемника.
Стоимость устройства будет состоять из стоимости разработки ПО для микроконтроллера, стоимости разработки конструкторской документации (КД) и стоимости сборки и испытания устройства.
3.1 Расчет расходов на ПО, которое разрабатывается
Исходные данные для расчета стоимости разработки ПО, которое разрабатывается приведены в таблице 3.1.
Таблица 3.1 – Исходные данные по предприятию
| №п/п |
Статьи затрат |
Усл. обоз. |
Ед. изм. |
Значения |
| Проектирование и разработка ПО |
| 1 |
Часовая тарифная ставка программиста |
Зпр
|
грн. |
8,00 |
| 2 |
Коэффициент сложности программы |
с |
коэф. |
1,40 |
| 3 |
Коэффициент коррекции программы |
Р |
коэф. |
0,05 |
| 4 |
Коэффициент увеличения расходов труда |
Z |
коэф. |
1,3 |
| 5 |
Коэффициент квалификации программиста |
k |
коэф. |
1,0 |
| 6 |
Амортизационные отчисления |
Амт
|
% |
10,0 |
| 7 |
Мощность компьютера, принтера |
WМ
|
Квт/ч |
0,40 |
| 8 |
СтоимостьПЕОМ IBM
Sempron LE1150(AM2)/1GB/TFT
|
Втз
|
грн. |
3200,00 |
| 9 |
Тариф на электроэнергию |
Це/е
|
грн. |
0,56 |
| 10 |
Норма дополнительной зарплаты |
Нд
|
% |
10,0 |
| 11 |
Отчисление на социальные расходы |
Нсоц
|
% |
37,2 |
| 12 |
Транспортно-заготовительные расходы |
Нтр
|
% |
4,0 |
| Эксплуатация П0 |
| 13 |
Численность обслуживающего персонала |
Чо
|
чел |
1 |
| 14 |
Часовая тарифная ставка обслуживающего персонала |
Зпер
|
грн. |
6,00 |
| 15 |
Время обслуживания систем |
То
|
час/г |
150 |
| 16 |
Стоимость ПЕОМ |
Втз
|
грн. |
3200,00 |
| 17 |
Норма амортизационных отчислений на ПЕОМ |
На
|
% |
10,0 |
| 18 |
Норма амортизационных отчислений на ПЗ |
НаПО
|
% |
10,0 |
| 19 |
Накладные расходы |
Рнак
|
% |
25,0 |
| 20 |
Отчисление на содержание и ремонт ПЕОМ |
Нр
|
% |
10,0
|
| 21 |
Стоимость работы одного часа ПЕОМ |
Вг
|
грн. |
6,5 |
Первичными исходными данными для определения себестоимости ПО является количество исходных команд (операторов) конечного программного продукта. Условное количество операторов Q в программе задания может быть оценено по формуле:
 ,(3.1) ,(3.1)
где у – расчетное количество операторов в программе, что разрабатывается (единиц);
с – коэффициент сложности программы;
р – коэффициент коррекции программы в ходе ее разработки.
Рассчитанное количество операторов в разработанной программе для ИК пульта – 200, для ИК приемника – 100.
Коэффициент с – относительная сложность задания относительно отношения к типичной задаче, сложность которой принята более 1, лежит в границах от 1,25 до 2,0 и выбирается равным 1,30.
Коэффициент коррекции программы р – увеличение объема работ за счет внесения изменений в программу лежит в границах от 0,05 до 0,1 и выбирается равным 0,05.
Подставим выбранные значения в формулу (3.1) и определим величину Q:
Qпу
= 200∙1,3 (1 + 0,05) = 273- для пульта;
Qпр
= 100∙1,3 (1 + 0,05) = 137- для приемника.
3.2 Расчет расходов на создание ПО
Расчет расходов на ПО проводится методом калькуляции расходов, в основу которого положена трудоемкость и заработная плата разработчиков. Трудоемкость разработки ПО рассчитывается по формуле:
 (3.2) (3.2)
где То
– расходы труда на описание задания;
Ти
– расходы труда на изучение описания задания;
Та
– расходы труда на разработку алгоритма решения задания;
Тп
– расходы труда на составление программы по готовой блок-схеме;
Тотл
– расходы труда на отладку программы на ЭВМ;
Тд
– расходы труда на подготовку документации.
Составные расходы труда, в свою очередь, можно определить по числу операторов Q для ПО, которое разрабатывается. При оценке расходов труда используются:
- коэффициенты квалификации разработчика алгоритмов и программ – k;
– увеличение расходов труда в результате недостаточного описания задания – Z.
Коэффициент квалификации разработчика характеризует меру подготовленности исполнителя к порученной ему работе (он задается в зависимости от стажа работы), k = 1,0.
Коэффициент увеличения расходов труда в результате недостаточного описания задания характеризует качество постановки задания, выданного для разработки программы, в связи с тем, что задание требовало уточнения и некоторой доработки. Этот коэффициент принимается равным 1,3.
Все исходные данные приведенные в таблице 3.1.
а) Трудоемкость разработки П0 составляет:
Расходы труда на подготовку описания задания Топу
принимаются равными 5 чел/час для пульта и 3 чел/час для приемника, исходя из опыта работы.
Расходы труда на изучение описания задания Те
с учетом уточнения описания и квалификации программиста могут быть определены по формуле:
 ;(3.3) ;(3.3)
Типу
= 273∙1,3/80∙1 = 5(чел/час)
Типр
= 137∙1,3/80∙1 = 3(чел/час)
Расходы труда на разработку алгоритма решения задачи рассчитываются по формуле:
 ; (3.4) ; (3.4)
Тапу
=273/25∙1 = 11 (чел/час)
Тапр
=137/25∙1 = 6 (чел/час)
Расходы труда на составление программы по готовой блок-схеме Тп
рассчитываются по формуле:
 ;(3.5) ;(3.5)
 (чел/час) (чел/час)
 (чел/час) (чел/час)
Расходы труда на отладку программы на ПЕОМ Тотл
рассчитываются по формуле:
при автономной отладке одного задания:
 ;(3.6) ;(3.6)
 (чел/час) (чел/час)
 (чел/час) (чел/час)
при комплексной отладке задания:
 ;(3.7) ;(3.7)
 (чел/час) (чел/час)
Расходы труда на подготовку документации по заданию Тд
определяются по формуле:
 ,(3.8) ,(3.8)
где Тдр
– расходы труда на подготовку материалов в рукописи:
 ;(3.9) ;(3.9)
 (чел/час) (чел/час)
 (чел/час) (чел/час)
Тдо
– расходы труда на редактирование, печать и оформление документация:
 .(3.10) .(3.10)
 (чел/час) (чел/час)
 (чел/час) (чел/час)
Подставляя приобретенных значений в формулу (3.8), получим:
 (чел/час) (чел/час)
 (чел/час) (чел/час)
Определим трудоемкость разработки ПО, подставив полученные значения составляющих в формулу (3.2):
 (чел/час) (чел/час)
 (чел/час) (чел/час)
Расчет трудоемкости и зарплаты приведен в таблице 3.2(для пульта) и таблице 3.3 (для приемника).
Таблица 3.2 – Трудоемкость и зарплата разработчиков ПО (для пульта)
Наименование этапов
разработки
|
Трудоемкость
чел/часов
|
Почасовая тарифная ставка программиста, грн. |
Сумма зарплаты, грн. |
| Описание задания |
5 |
8,00 |
40,00 |
| Изучение задания |
5 |
8,00 |
40,00 |
| Составление алгоритма решения задачи |
11 |
8,00 |
88,00 |
| Программирование |
13 |
8,00 |
104,00 |
| Отладка программы |
55 |
8,00 |
440,00 |
| Оформление документации |
25 |
8,00 |
200,00 |
| ВСЕГО: |
114 |
8,00 |
912,00 |
Таблица 3.3 – Трудоемкость и зарплата разработчиков ПО (для приемника)
Наименование этапов
разработки
|
Трудоемкость
чел/часов
|
Почасовая тарифная ставка программиста, грн. |
Сумма зарплаты, грн. |
| Описание задания |
3 |
8,00 |
24,00 |
| Изучение задания |
3 |
8,00 |
24,00 |
| Составление алгоритма решения задачи |
6 |
8,00 |
48,00 |
| Программирование |
7 |
8,00 |
56,00 |
| Отладка программы |
28 |
8,00 |
224,00 |
| Оформление документации |
13 |
8,00 |
104,00 |
| ВСЕГО: |
60 |
8,00 |
480,00 |
б) Расчет материальных расходов на разработку ПО
Материальные расходы Мз
, которые необходимы для создания ПО приведены в таблице 3.4.
Таблица 3.4 – Расчет материальных расходов на разработку ПО
| Материал |
Фактическое количество |
Цена за единицу, грн. |
Сумма, грн. |
1. DVD
|
2 |
3,00 |
6,00 |
2. Бумага
|
500 |
0,10 |
50,00 |
ВСЕГО:
|
56,00 |
ТЗР (4%)
|
2,24 |
ИТОГО:
|
57,24 |
(Для пульта и приемника значения одинаковые).
в) Расходы на использование ЭВМ при разработке ПО
Расходы на использование ЭВМ при разработке ПО рассчитываются, исходя расходов одного часа, по формуле:
 ,(3.12) ,(3.12)
где Вг
– стоимость работы одного часа ЭВМ, грн.;
Тотл
– расходы труда на наладку программы на ЭВМ, чел./час.;
Тд
– расходы труда на подготовку документации, чел./час.; Тп
– расходы труда на составление программы по готовой блок-схеме, чел./час.
 (грн.) (грн.)
 (грн.) (грн.)
г) Расчет технологической себестоимости создания программы
Расчет технологической себестоимости создания программы проводится методом калькуляции расходов (таблица 3.5 и таблица 3.6, соответственно).
Таблица 3.5 – Калькуляция технологических расходов на создание ПО (для пульта)
Наименование
|
Расходы, грн.
|
| 1 |
Материальные расходы
|
57,24 |
| 2 |
Основная зарплата
|
912,00 |
| 3 |
Дополнительная зарплата (15,0 %)
|
136,80 |
| 4 |
Отчисление на социальные мероприятия (37,2 %)
|
390,15 |
| 5 |
Накладные расходы (25,0 %)
|
228,00 |
| 6 |
Расходы на использование ЭВМ
составлении программного обеспечения ПО
|
604,50 |
| 7 |
Себестоимость ПО микроконтроллера
|
2328,69 |
Таблица 3.6 – Калькуляция технологических расходов на создание ПО (для приемника)
Наименование
|
Расходы, грн.
|
| 1 |
Материальные расходы
|
57,24 |
| 2 |
Основная зарплата
|
480,00 |
| 3 |
Дополнительная зарплата (15,0 %)
|
72,00 |
| 4 |
Отчисление на социальные мероприятия (37,2 %)
|
205,34 |
| 5 |
Накладные расходы (25,0 %)
|
120,00 |
| 6 |
Расходы на использование ЭВМ
составлении программного обеспечения ПО
|
312,00 |
| 7 |
Себестоимость ПО микроконтроллера
|
1246,58 |
В таблице 3.5 и таблице 3.6 величина материальных расходов Мз
рассчитана в таблице 3.3, основная зарплата Со
берется из таблицы 3.2 и 3.3, дополнительная зарплата составляет 15% от основной зарплаты, отчисление на социальные потребности – 37,2% от основной и дополнительной зарплат (вместе), накладные расходы – 25% от основной зарплаты. Себестоимость разработанной программы СПО
рассчитывается как сумма пунктов 1 – 6.
Стоимость ПО для микроконтроллера составляет 2328,69 грн. для пульта на единицу продукции и 1246,58 грн. для приемника.
3.3 Расчет стоимости разработки конструкторской документации и
сборки устройства
а) Трудоемкость разработки КД изделия (Т) рассчитывается по формуле:
 ,(3.13) ,(3.13)
где Татз
– расходы труда на анализ технического задания (ТЗ), чел./час;
Трес
– расходы труда на разработку электрических схем, чел./час;
Трк
– расходы труда на разработку конструкции, чел./час;
Трт
– расходы труда на разработку технологии, чел./час;
Токд
– расходы труда на оформление КД, чел./час;
Твидз
– расходы труда на изготовление и испытание опытного образца, чел./час.
Данные расчета заносятся в таблицу 3.7.
Заработная плата на разработку КД изделия определяется по формуле:
 ,(3.14) ,(3.14)
где  - почасовая тарифная ставка разработчика, грн.; - почасовая тарифная ставка разработчика, грн.;
 - трудоемкость разработки КД изделия. - трудоемкость разработки КД изделия.
б) Расчет материальных расходов на разработку КД
Материальные расходы Мв
, которые необходимы для разработки (создании) КД, приведены в таблице 3.8.
Таблица 3.7 - Расчет заработной платы на разработку КД изделия
| Виды работ |
Условные обозначения |
Почасовая тарифная ставка -
Сст,
грн. |
Факт.
расходы времени
чел./час;
|
Зарплата, грн. |
| 1. Анализ ТЗ |
Татз
|
6,00 |
2 |
12,00 |
| 2. Разработка электрических схем |
Трес
|
6,00 |
4 |
24,00 |
| 3. Разработка конструкции |
Трк
|
6,00 |
4 |
24,00 |
| 4. Разработка технологии |
Трт
|
6,00 |
2 |
12,00 |
| 5. Оформление КД |
Токд
|
6,00 |
2 |
12,00 |
| 6. Изготовление и испытание опытного образца |
Твидз
|
6,00
|
8
|
48,00
|
| Всего: |
å |
6,00 |
22 |
132,00 |
Таблица 3.8 - Расчет материальных расходов на разработку КД
Материал
|
Обозначение пометь. |
Факт. кол.
чество
|
Цена за ед. грн.
цу, грн.
|
Сумма,
грн.
|
| 1. CD DVD |
2 |
3,00 |
6,00 |
| 2. Бумага |
500 |
0,07 |
35,00 |
| ВСЕГО: |
å |
41,00 |
| ТЗР (4%) |
1,64 |
| Итого: |
Мв
|
42,64 |
в) Расходы на использование ЭВМ при разработке КД
Расходы, на использование ЭВМ при разработке КД, рассчитываются исходя из расходов работы одного часа ЭВМ по формуле, грн.:
 ,(3.15) ,(3.15)
где Вг
– стоимость работы одного часа ЭВМ, грн.
Трес
– расходы труда на разработку электрических схем, чел./час;
Трк
– расходы труда на разработку конструкции, чел./час;
Трт
– расходы труда на разработку технологии, чел./час;
Токд
– расходы труда на оформление КД, чел./час;
При этом, стоимость работы одного часа ЭВМ (других технических средств - ТС) Вг определяется по формуле, грн.:
 ,(3.16) ,(3.16)
где Те/е
– расходы на электроэнергию, грн.;
Ваморт
– величина 1-ого часа амортизации ЭВМ (ТС), грн.;
Зперс
– почасовая зарплата обслуживающего персонала, грн.;
Трем
– расходы на ремонт, покупку деталей, грн.;
Стоимость одного часа амортизации Ваморт
определяется по формуле, грн.: (при 40 часовой рабочей неделе)
 ,(3.17) ,(3.17)
где Втз
- стоимость технических средств, грн.
На
- норма годовой амортизации (%).
Кт
- количество недель на год (52 недели/год).
Гт
- количество рабочих часов в неделю (40 час/неделя)
Почасовая оплата обслуживающего персонала Зперс
рассчитывается по формуле, грн.:
 ,(3.18) ,(3.18)
где Окл
- месячный оклад обслуживающего персонала, грн.
Крг
- количество рабочих часов в месяц (160 часов/месяц);
Нрем
- расходы на оплату труда ремонта ЭВМ (6 % Окл
).
Расходы на ремонт, покупку деталей для ЭВМ Трем
определяются по формуле, грн.:
 ,(3.19) ,(3.19)
где Втз
- стоимость технических средств, грн.
Нрем
- процент расходов на ремонт, покупку деталей (%);
Кт
- количество недель на год (52 недели/год).
Гт
- количество рабочих часов в неделю (36 ¸ 168 час./неделя)
Расходы на использование электроэнергии ЭВМ и техническими средствами Те/е
определяются по формуле, грн.:
 ,(3.20) ,(3.20)
где Ве/е
– стоимость одного кВт/час электроэнергии, грн.;
Wпот
– мощность компьютера, принтера и сканера (за 1 час), (кВт/час.).
Таким образом, стоимость одного часа работы ЭВМ при разработке КД будет составлять (см. формулу 3.16), грн.:
.
Расходы на использование ЭВМ при разработке, грн. (см. формулу 3.15):
г) Расчет технологической себестоимости создания КД
Расчет технологической себестоимости создания КД изделия проводится методом калькуляции расходов (таблица 3.9).
В таблице 3.9 величина материальных расходов Мв
рассчитана в таблице 3.8, основная зарплата Со
берется из таблицы 3.7, дополнительная зарплата 15 % от основной зарплаты, отчисление на социальные мероприятия –37,2% - от основной и дополнительной зарплаты (вместе). Накладные расходы 25% от основной зарплаты. Себестоимость разработанной конструкторской документации Скд
рассчитывается как сумма пунктов 1–6.
Таблица 3.9 - Калькуляция технологических расходов на создание КД
изделия
№
п/п
|
Наименование статей |
Условные
обозначения
|
Расходы (грн.) |
| 1 |
2 |
3 |
4 |
| 1. |
Материальные расходы |
Мв
|
42,64 |
| 2. |
Основная зарплата |
Зо
|
132,00 |
| 3. |
Дополнительная зарплата |
Зд
|
19,80 |
| 4. |
Отчисление на социальные мероприятия |
37,2%(Зо
+Зд
) |
56,47 |
| 5. |
Общепроизводственные (накладные) расходы предприятия |
Ннакл
|
33,00 |
| 6. |
Расходы на использование ЭВМ при составлении программного обеспечения КД |
ВЕОМ
|
26,60 |
| 7. |
Себестоимость КД изделия |
Скд= å (1¸6) |
310,51 |
3.4 Расчет расходов на стадии производства изделия
Себестоимость изделия которое разрабатывается рассчитывается на основе норм материальных и трудовых расходов. Среди исходных данных, которые используются для расчета себестоимости изделия, выделяют нормы расходов сырья и основных материалов на одно изделие.
Таблица 3.10 -Расчет расходов на сырье и основные материалы на одно изделие
| Материалы |
Норма расходов
(единиц)
|
Оптовая цена грн./ед. |
Фактические расходы
(единиц)
|
Сумма
грн.
|
| 1 |
2 |
3 |
4 |
5 |
Стеклотекстолит СФ-2-35
(лист 1,0 ГОСТ 10316 - 78), кг
|
0,5 |
24,00 |
0,4 |
9,60 |
| Припой ПОС - 61 (ГОСТ 21930 - 76), кг |
0,05 |
18.00 |
0,05 |
0,90 |
| Всего: |
10,50 |
| Транспортно-заготовительные расходы (4%) |
0,42 |
| Итого: |
10,92 |
В ходе расчета себестоимости изделия, как исходные данные, используют спецификации материалов, покупных комплектующих изделий и полуфабрикатов, которые используются при сборке одного изделия (Приложение Ж – для пульта и Приложение К – для приемника).
Расчет зарплаты основных производственных рабочих проводим на основе норм трудоемкости по видам работ и по часовым ставкам рабочих (таблица 3.11).
Таблица 3.11 - Расчет основной зарплаты
| Наименование операции |
Почасовая тарифная ставка, грн. |
Норма временичел./час. |
Сдельная зарплата, грн. |
| Заготовительная |
5,67 |
1 |
5,67 |
| Фрезерная |
5,67 |
1 |
5,67 |
| Слесарная |
5,67 |
1 |
5,67 |
| Гравировка |
5,67 |
1 |
5,67 |
| Фотохимпечать |
5,67 |
2 |
11,34 |
| Гальваническая |
5,67 |
2 |
11,34 |
| Маркировочная |
5,67 |
1 |
5,67 |
| Сборка |
5,67 |
2 |
11,34 |
| Монтаж |
5,67 |
1 |
5,67 |
| Настройка |
5,67 |
2 |
11,34 |
| Другие |
- |
- |
- |
| Всего: |
14 |
62,37 |
Калькуляция себестоимости и определения цены выполняется в таблице 3.12.
Таблица 3.12 - Калькуляция себестоимости и определения цены изделия
| Наименование статей расходов |
Расходы
грн.
|
| 1 |
2 |
| Сырье и материалы |
10,92 |
| Покупные комплектующие изделия |
19,34 |
| Основная зарплата рабочих |
62,37 |
| Дополнительная зарплата (15%) |
9,36 |
| Отчисление на социальные мероприятия (37,2%) |
26,68 |
| Накладные расходы (25% ) |
15,59 |
| Стоимость КД |
310,51 |
| Общая стоимость |
454,77 |
Общая стоимость изделия будет составлять:
Собщ.
= С прог.
+ С баз. Бл.
(3.21)
где С прог.
– себестоимость составления программы для микроконтроллера;
С баз. Бл
– себестоимость подготовки КД и сборки устройства.
При единичном изготовлении стоимость пульта:
Собщ.ПУ
= 2328,69+ 454,77= 2783,46 (грн.).
Для приемника:
Собщ.ПУ
= 1246,58 + 454,77= 1701,35 (грн).
Как видим общая стоимость устройств отличается, т.к. программа для микроконтроллера пульта содержит 200 операторов, а для приемника – 100, хотя устройства по количеству комплектующих идентичны.
Проведем маркетинговые исследования аналогичных устройств.
3.5 Анализ устройств-аналогов
При анализе рынка сбыта аналогичных устройств, были выяснены стоимость и функции выполняемые данными устройствами.
Таблица 3.13 – Сравнительная характеристика устройств-аналогов
| Названиеустройства |
Выполняемые функции |
Количество источников управления |
Цена, ед.грн. |
Примечания |
| ИК пультWP-2 |
Управление ИК лучами l = 5м |
2 |
80,00 |
| ИК пультбез названия |
Управление ИК лучами l = 5м |
1 |
50,00 |
| ПроектируемоеУстройствоИК пульт |
Управление ИК лучами l = 8м |
4 |
147,00 |
При выпуске 1000
изделий
|
| ИК приемникWPS-2 |
Прием ИК сигналов для управления устройствами |
2 |
100,00 |
| ИК приемникбез названия |
Прием ИК сигналов для управления устройством |
1 |
50,00 |
| Проектируемое устройство ИК приемник |
Прием ИК сигналов для включения светодиодов |
4 |
145,00 |
При выпуске 1000изделий |
При анализе устройств-аналогов выяснилось, что наше устройство содержит большее количество выполняемых функций, хотя управление осуществляется только включение светодиодов.
Проектируемое устройство будет стоить меньше при массовом производстве, из-за:
- стоимость ПО делиться на количество выпущенных изделий;
- стоимость КД, также будет снижаться от количества выпускаемых изделий;
- при массовом производстве комплектующие и материалы будут приобретаться оптово, т.е. цена их будет ниже.
4 Охрана труда
Научно-технический прогресс внес серьезные изменения в условия производственной деятельности работников умственного труда. Их труд стал более интенсивным, напряженным, требующим значительных затрат умственной, эмоциональной и физической энергии. Это потребовало комплексного решения проблем эргономики, гигиены и организации труда, регламентации режимов труда и отдыха.
В настоящее время компьютерная техника широко применяется во всех областях деятельности человека. При работе с компьютером человек подвергается воздействию ряда опасных и вредных производственных факторов: электромагнитных полей (диапазон радиочастот: ВЧ, УВЧ и СВЧ), инфракрасного и ионизирующего излучений, шума и вибрации, статического электричества и др..
Работа с компьютером характеризуется значительным умственным напряжением и нервно-эмоциональной нагрузкой операторов, высокой напряженностью зрительной работы и достаточно большой нагрузкой на мышцы рук при работе с клавиатурой ЭВМ. Большое значение имеет рациональная конструкция и расположение элементов рабочего места, что важно для поддержания оптимальной рабочей позы человека-оператора.
В процессе работы с компьютером необходимо соблюдать правильный режим труда и отдыха. В противном случае у персонала отмечаются значительное напряжение зрительного аппарата с появлением жалоб на неудовлетворенность работой, головные боли, раздражительность, нарушение сна, усталость и болезненные ощущения в глазах, в пояснице, в области шеи и руках.
4.1 Требования к производственным помещениям
4.1.1 Окраска и коэффициенты отражения
Окраска помещений и мебели должна способствовать созданию благоприятных условий для зрительного восприятия, хорошего настроения.
Источники света, такие как светильники и окна, которые дают отражение от поверхности экрана, значительно ухудшают точность знаков и влекут за собой помехи физиологического характера, которые могут выразиться в значительном напряжении, особенно при продолжительной работе. Отражение, включая отражения от вторичных источников света, должно быть сведено к минимуму.
Для защиты от избыточной яркости окон могут быть применены шторы и экраны.
В зависимости от ориентации окон рекомендуется следующая окраска стен и пола:
окна ориентированы на юг: - стены зеленовато-голубого или светло-голубого цвета; пол - зеленый;
окна ориентированы на север: - стены светло-оранжевого или оранжево-желтого цвета; пол - красновато-оранжевый;
окна ориентированы на восток: - стены желто-зеленого цвета; пол зеленый или красновато-оранжевый;
окна ориентированы на запад: - стены желто-зеленого или голубовато-зеленого цвета; пол зеленый или красновато-оранжевый.
В помещениях, где находится компьютер, необходимо обеспечить следующие величины коэффициента отражения: для потолка: 60-70%, для стен: 40-50%, для пола: около 30%. Для других поверхностей и рабочей мебели: 30-40%.
4.1.2 Освещение
Правильно спроектированное и выполненное производственное освещение улучшает условия зрительной работы, снижает утомляемость, способствует повышению производительности труда, благотворно влияет на производственную среду, оказывая положительное психологическое воздействие на работающего, повышает безопасность труда и снижает травматизм.
Недостаточность освещения приводит к напряжению зрения, ослабляет внимание, приводит к наступлению преждевременной утомленности. Чрезмерно яркое освещение вызывает ослепление, раздражение и резь в глазах.
Неправильное направление света на рабочем месте может создавать резкие тени, блики, дезориентировать работающего. Все эти причины могут привести к несчастному случаю или профзаболеваниям, поэтому столь важен правильный расчет освещенности.
Существует три вида освещения - естественное, искусственное и совмещенное (естественное и искусственное вместе).
Естественное освещение - освещение помещений дневным светом, проникающим через световые проемы в наружных ограждающих конструкциях помещений.
Естественное освещение характеризуется тем, что меняется в широких пределах в зависимости от времени дня, времени года, характера области и ряда других факторов.
Искусственное освещение применяется при работе в темное время суток и днем, когда не удается обеспечить нормированные значения коэффициента естественного освещения (пасмурная погода, короткий световой день).
Освещение, при котором недостаточное по нормам естественное освещение дополняется искусственным, называется совмещенным освещением.
Искусственное освещение подразделяется на рабочее, аварийное, эвакуационное, охранное. Рабочее освещение, в свою очередь, может быть общим или комбинированным. Общее - освещение, при котором светильники размещаются в верхней зоне помещения равномерно или применительно к расположению оборудования. Комбинированное - освещение, при котором к общему добавляется местное освещение.
Согласно СНиП II-4-79 в помещений вычислительных центров необходимо применить систему комбинированного освещения.
При выполнении работ категории высокой зрительной точности (наименьший размер объекта различения 0,3…0,5мм) величина коэффициента естественного освещения (КЕО) должна быть не ниже 1,5%, а при зрительной работе средней точности (наименьший размер объекта различения 0,5…1,0 мм) КЕО должен быть не ниже 1,0%. В качестве источников искусственного освещения обычно используются люминесцентные лампы типа ЛБ или ДРЛ, которые попарно объединяются в светильники, которые должны располагаться над рабочими поверхностями равномерно.
Требования к освещенности в помещениях, где установлены компьютеры, следующие: при выполнении зрительных работ высокой точности общая освещенность должна составлять 300лк, а комбинированная - 750лк; аналогичные требования при выполнении работ средней точности - 200 и 300лк соответственно.
Кроме того все поле зрения должно быть освещено достаточно равномерно – это основное гигиеническое требование. Иными словами, степень освещения помещения и яркость экрана компьютера должны быть примерно одинаковыми, т.к. яркий свет в районе периферийного зрения значительно увеличивает напряженность глаз и, как следствие, приводит к их быстрой утомляемости.
4.1.3 Параметры микроклимата
Параметры микроклимата могут меняться в широких пределах, в то время как необходимым условием жизнедеятельности человека является поддержание постоянства температуры тела благодаря терморегуляции, т.е. способности организма регулировать отдачу тепла в окружающую среду. Принцип нормирования микроклимата – создание оптимальных условий для теплообмена тела человека с окружающей средой.
Вычислительная техника является источником существенных тепловыделений, что может привести к повышению температуры и снижению относительной влажности в помещении. В помещениях, где установлены компьютеры, должны соблюдаться определенные параметры микроклимата. В санитарных нормах СН-245-71 установлены величины параметров микроклимата, создающие комфортные условия. Эти нормы устанавливаются в зависимости от времени года, характера трудового процесса и характера производственного помещения (см. табл. 4.1)
Объем помещений, в которых размещены работники вычислительных центров, не должен быть меньше 19,5м3
/человека с учетом максимального числа одновременно работающих в смену. Нормы подачи свежего воздуха в помещения, где расположены компьютеры, приведены в табл. 4.2.
Для обеспечения комфортных условий используются как организационные методы (рациональная организация проведения работ в зависимости от времени года и суток, чередование труда и отдыха), так и технические средства (вентиляция, кондиционирование воздуха, отопительная система).
Таблица 4.1- Параметры микроклимата для помещений, где установлены компьютеры
| Период года |
Параметр микроклимата |
Величина |
| Холодный |
Температура воздуха в помещении |
22…24°С |
| Относительная влажность |
40…60% |
| Скорость движения воздуха |
до 0,1м/с |
| Теплый |
Температура воздуха в помещении |
23…25°С |
| Относительная влажность |
40…60% |
| Скорость движения воздуха |
0,1…0,2м/с |
Таблица 4.2 - Нормы подачи свежего воздуха в помещения, где расположены компьютеры
| Характеристика помещения |
Объемный расход подаваемого в помещение свежего воздуха, м3
/на одного человека в час |
| Объем до 20м3
на человека |
Не менее 30 |
| 20…40м3
на человека |
Не менее 20 |
| Более 40м3
на человека |
Естественная вентиляция |
4.1.4 Шум и вибрация
Шум ухудшает условия труда оказывая вредное действие на организм человека. Работающие в условиях длительного шумового воздействия испытывают раздражительность, головные боли, головокружение, снижение памяти, повышенную утомляемость, понижение аппетита, боли в ушах и т. д. Такие нарушения в работе ряда органов и систем организма человека могут вызвать негативные изменения в эмоциональном состоянии человека вплоть до стрессовых. Под воздействием шума снижается концентрация внимания, нарушаются физиологические функции, появляется усталость в связи с повышенными энергетическими затратами и нервно-психическим напряжением, ухудшается речевая коммутация. Все это снижает работоспособность человека и его производительность, качество и безопасность труда. Длительное воздействие интенсивного шума [выше 80 дБ(А)] на слух человека приводит к его частичной или полной потере.
В табл. 4.3 указаны предельные уровни звука в зависимости от категории тяжести и напряженности труда, являющиеся безопасными в отношении сохранения здоровья и работоспособности.
Таблица 4.3 - Предельные уровни звука, дБ, на рабочих местах
| Категория напряженности труда |
Категория тяжести труда |
| Легкая |
Средняя |
Тяжелая |
Очень тяжелая |
| I. Мало напряженный |
80 |
80 |
75 |
75 |
| II. Умеренно напряженный |
70 |
70 |
65 |
65 |
| III. Напряженный |
60 |
60 |
- |
- |
| IV. Очень напряженный |
50 |
50 |
- |
- |
Уровень шума на рабочем месте математиков-программистов и операторов видеоматериалов не должен превышать 50дБА, а в залах обработки информации на вычислительных машинах - 65дБА. Для снижения уровня шума стены и потолок помещений, где установлены компьютеры, могут быть облицованы звукопоглощающими материалами. Уровень вибрации в помещениях вычислительных центров может быть снижен путем установки оборудования на специальные виброизоляторы.
4.1.5 Электромагнитное и ионизирующее излучения
Большинство ученых считают, что как кратковременное, так и длительное воздействие всех видов излучения от экрана монитора не опасно для здоровья персонала, обслуживающего компьютеры. Однако исчерпывающих данных относительно опасности воздействия излучения от мониторов на работающих с компьютерами не существует и исследования в этом направлении продолжаются.
Допустимые значения параметров неионизирующих электромагнитных излучений от монитора компьютера представлены в табл. 4.4.
Максимальный уровень рентгеновского излучения на рабочем месте оператора компьютера обычно не превышает 10мкбэр/ч, а интенсивность ультрафиолетового и инфракрасного излучений от экрана монитора лежит в пределах 10-100мВт/м2
.
Таблица 4.4 - Допустимые значения параметров неионизирующих электромагнитных излучений (в соответствии с СанПиН 2.2.2.542-96)
| Наименование параметра |
Допустимые значения |
| Напряженность электрической составляющей электромагнитного поля на расстоянии 50см от поверхности видеомонитора |
10В/м |
Напряженность магнитной составляющей электромагнитного
поля на расстоянии 50см от поверхности видеомонитора
|
0,3А/м |
Напряженность электростатического поля не должна превышать:
для взрослых пользователей
для детей дошкольных учреждений и учащихся средних специальных и высших учебных заведений
|
20кВ/м
15кВ/м
|
Для снижения воздействия этих видов излучения рекомендуется применять мониторы с пониженным уровнем излучения (MPR-II, TCO-92, TCO-99), устанавливать защитные экраны, а также соблюдать регламентированные режимы труда и отдыха.
4.2 Эргономические требования к рабочему месту
Проектирование рабочих мест, снабженных видеотерминалами, относится к числу важных проблем эргономического проектирования в области вычислительной техники.
Рабочее место и взаимное расположение всех его элементов должно соответствовать антропометрическим, физическим и психологическим требованиям. Большое значение имеет также характер работы. В частности, при организации рабочего места программиста должны быть соблюдены следующие основные условия: оптимальное размещение оборудования, входящего в состав рабочего места и достаточное рабочее пространство, позволяющее осуществлять все необходимые движения и перемещения.
Эргономическими аспектами проектирования видеотерминальных рабочих мест, в частности, являются: высота рабочей поверхности, размеры пространства для ног, требования к расположению документов на рабочем месте (наличие и размеры подставки для документов, возможность различного размещения документов, расстояние от глаз пользователя до экрана, документа, клавиатуры и т.д.), характеристики рабочего кресла, требования к поверхности рабочего стола, регулируемость элементов рабочего места.
Главными элементами рабочего места программиста являются стол и кресло.
Основным рабочим положением является положение сидя.
Рабочая поза сидя вызывает минимальное утомление программиста.
Рациональная планировка рабочего места предусматривает четкий порядок и постоянство размещения предметов, средств труда и документации. То, что требуется для выполнения работ чаще, расположено в зоне легкой досягаемости рабочего пространства.
Моторное поле - пространство рабочего места, в котором могут осуществляться двигательные действия человека.
Максимальная зона досягаемости рук - это часть моторного поля рабочего места, ограниченного дугами, описываемыми максимально вытянутыми руками при движении их в плечевом суставе.
Оптимальная зона - часть моторного поля рабочего места, ограниченного дугами, описываемыми предплечьями при движении в локтевых суставах с опорой в точке локтя и с относительно неподвижным плечом.
Оптимальное размещение предметов труда и документации в зонах досягаемости:
ДИСПЛЕЙ размещается в зоне а (в центре);
СИСТЕМНЫЙ БЛОК размещается в предусмотренной нише стола;
КЛАВИАТУРА - в зоне г/д;
«МЫШЬ» - в зоне в справа;
СКАНЕР в зоне а/б (слева);
ПРИНТЕР находится в зоне а (справа);
ДОКУМЕНТАЦИЯ: необходимая при работе - в зоне легкой досягаемости ладони – в, а в выдвижных ящиках стола - литература, неиспользуемая постоянно (Рис.4.1).

Рисунок 4.1 - Разбивка рабочего стола программиста по зонам
На рис. 4.2 показан пример размещения основных и периферийных составляющих ПК на рабочем столе программиста.
Для комфортной работы стол должен удовлетворять следующим условиям:
- высота стола должна быть выбрана с учетом возможности сидеть свободно, в удобной позе, при необходимости опираясь на подлокотники;
- нижняя часть стола должна быть сконструирована так, чтобы программист мог удобно сидеть, не был вынужден поджимать ноги;
- поверхность стола должна обладать свойствами, исключающими появление бликов в поле зрения программиста;
- конструкция стола должна предусматривать наличие выдвижных ящиков (не менее 3 для хранения документации, листингов, канцелярских принадлежностей);

Рисунок 4.2- Размещения основных и периферийных составляющих ПК на рабочем столе программиста:
1 – сканер, 2 – монитор, 3 – принтер, 4 – поверхность рабочего стола,
5 – клавиатура, 6 – манипулятор типа «мышь».
- высота рабочей поверхности рекомендуется в пределах 680-760мм;
- высота поверхности, на которую устанавливается клавиатура, должна быть около 650мм.
Большое значение придается характеристикам рабочего кресла. Так, рекомендуемая высота сиденья над уровнем пола находится в пределах 420-
550мм. Поверхность сиденья мягкая, передний край закругленный, а угол наклона спинки - регулируемый.
Необходимо предусматривать при проектировании возможность различного размещения документов: сбоку от видеотерминала, между монитором и клавиатурой и т.п. Кроме того, в случаях, когда видеотерминал имеет низкое качество изображения, например заметны мелькания, расстояние от глаз до экрана делают больше (около 700мм), чем расстояние от глаза до документа (300-450мм). Вообще при высоком качестве изображения на видеотерминале расстояние от глаз пользователя до экрана, документа и клавиатуры может быть равным.
Положение экрана определяется:
- расстоянием считывания (0,6 - 0,7м);
- углом считывания, направлением взгляда на 20˚ ниже горизонтали к центру экрана, причем экран перпендикулярен этому направлению.
Должна также предусматриваться возможность регулирования экрана:
- по высоте +3 см;
- по наклону от -10˚ до +20˚ относительно вертикали;
- в левом и правом направлениях.
При неудобной рабочей позе могут появиться боли в мышцах, суставах и сухожилиях. Требования к рабочей позе пользователя видеотерминала следующие:
- голова не должна быть наклонена более чем на 20˚,
- плечи должны быть расслаблены,
- локти - под углом 80˚-100˚,
- предплечья и кисти рук - в горизонтальном положении.
Причина неправильной позы пользователей обусловлена следующими факторами: нет хорошей подставки для документов, клавиатура находится слишком высоко, а документы - низко, некуда положить руки и кисти, недостаточно пространство для ног.
В целях преодоления указанных недостатков даются общие рекомендации: лучше передвижная клавиатура; должны быть предусмотрены специальные приспособления для регулирования высоты стола, клавиатуры и экрана, а также подставка для рук.
Существенное значение для производительной и качественной работы на компьютере имеют размеры знаков, плотность их размещения, контраст и соотношение яркостей символов и фона экрана. Если расстояние от глаз оператора до экрана дисплея составляет 60-80 см, то высота знака должна быть не менее 3мм, оптимальное соотношение ширины и высоты знака составляет
3:4, а расстояние между знаками – 15-20% их высоты. Соотношение яркости фона экрана и символов - от 1:2 до 1:15.
Во время пользования компьютером медики советуют устанавливать монитор на расстоянии 50-60 см от глаз. Специалисты также считают, что верхняя часть видеодисплея должна быть на уровне глаз или чуть ниже. Когда человек смотрит прямо перед собой, его глаза открываются шире, чем когда он смотрит вниз. За счет этого площадь обзора значительно увеличивается, вызывая обезвоживание глаз. К тому же если экран установлен высоко, а глаза широко открыты, нарушается функция моргания. Это значит, что глаза не закрываются полностью, не омываются слезной жидкостью, не получают достаточного увлажнения, что приводит к их быстрой утомляемости.
Создание благоприятных условий труда и правильное эстетическое оформление рабочих мест на производстве имеет большое значение, как для облегчения труда, так и для повышения его привлекательности, положительно влияющей на производительность труда.
4.3 Режим труда
Как уже было неоднократно отмечено, при работе с персональным компьютером очень важную роль играет соблюдение правильного режима труда и отдыха. В противном случае у персонала отмечаются значительное напряжение зрительного аппарата с появлением жалоб на неудовлетворенность работой, головные боли, раздражительность, нарушение сна, усталость и болезненные ощущения в глазах, в пояснице, в области шеи и руках.
В табл. 4.5 представлены сведения о регламентированных перерывах, которые необходимо делать при работе на компьютере, в зависимости от продолжительности рабочей смены, видов и категорий трудовой деятельности с ВДТ (видеодисплейный терминал) и ПЭВМ (в соответствии с САнНиП 2.2.2 542-96 «Гигиенические требования к видеодисплейным терминалам, персональным электронно-вычислительным машинам и организации работ»).
Таблица 4.5 - Время регламентированных перерывов при работе на компьютере
| Категория работы с ВДТ или ПЭВМ |
Уровень нагрузки за
рабочую смену при
видах работы с ВДТ, количество знаков
|
Суммарное время
регламентированных перерывов, мин
|
При 8-часовой
смене
|
При 12-часовой
смене
|
| Группа А |
до 20000 |
30 |
70 |
| Группа Б |
до 40000 |
50 |
90 |
| Группа В |
до 60000 |
70 |
120 |
Примечание. Время перерывов дано при соблюдении указанных Санитарных правил и норм. При несоответствии фактических условий труда требованиям Санитарных правил и норм время регламентированных перерывов следует увеличить на 30%.
В соответствии со САнНиП 2.2.2 546-96 все виды трудовой деятельности, связанные с использованием компьютера, разделяются на три группы: группа А: работа по считыванию информации с экрана ВДТ или ПЭВМ с предварительным запросом; группа Б: работа по вводу информации; группа В: творческая работа в режиме диалога с ЭВМ.
Эффективность перерывов повышается при сочетании с производственной гимнастикой или организации специального помещения для отдыха персонала с удобной мягкой мебелью, аквариумом, зеленой зоной и т.п.
4.4 Расчет освещенности
Расчет освещенности рабочего места сводится к выбору системы освещения, определению необходимого числа светильников, их типа и размещения. Исходя из этого, рассчитаем параметры искусственного освещения.
Обычно искусственное освещение выполняется посредством электрических источников света двух видов: ламп накаливания и люминесцентных ламп. Будем использовать люминесцентные лампы, которые по сравнению с лампами накаливания имеют ряд существенных преимуществ:
- по спектральному составу света они близки к дневному, естественному свету;
- обладают более высоким КПД (в 1,5-2 раза выше, чем КПД ламп накаливания);
- обладают повышенной светоотдачей (в 3-4 раза выше, чем у ламп накаливания);
- более длительный срок службы.
Расчет освещения производится для комнаты площадью 15м2
, ширина которой - 5м, высота - 3 м. Воспользуемся методом светового потока.
Для определения количества светильников определим световой поток, падающий на поверхность по формуле:
F = E∙S∙Z∙К / n , (4.1)
ГдеF - рассчитываемый световой поток, Лм;
Е - нормированная минимальная освещенность, Лк (определяется по таблице). Работу программиста, в соответствии с этой таблицей, можно отнести к разряду точных работ, следовательно, минимальная освещенность будет Е = 300Лк;
S - площадь освещаемого помещения (в нашем случае S = 15м2
);
Z - отношение средней освещенности к минимальной (обычно принимается равным 1,1-1,15 , пусть Z = 1,1);
К - коэффициент запаса, учитывающий уменьшение светового потока лампы в результате загрязнения светильников в процессе эксплуатации (его значение зависит от типа помещения и характера проводимых в нем работ и в нашем случае К = 1,5);
n - коэффициент использования, (выражается отношением светового потока, падающего на расчетную поверхность, к суммарному потоку всех ламп и исчисляется в долях единицы; зависит от характеристик светильника, размеров помещения, окраски стен и потолка, характеризуемых коэффициентами отражения от стен (РС) и потолка (РП)), значение коэффициентов РС и РП были указаны выше: РС=40%, РП=60%. Значение n определим по таблице коэффициентов использования различных светильников.
Для этого вычислим индекс помещения по формуле:
I = A∙B / h (A+B), (4.2)
где h - расчетная высота подвеса, h = 2,92 м;
A - ширина помещения, А = 3 м;
В - длина помещения, В = 5 м.
Подставив значения получим:
I= 0,642.
Зная индекс помещения I, по таблице 7 [23] находим n = 0,22.
Подставим все значения в формулу (4.1) для определения светового потока F, получаемF = 33750 Лм.
Для освещения выбираем люминесцентные лампы типа ЛБ40-1, световой поток которых Fл
= 4320 Лк.
Рассчитаем необходимое количество ламп по формуле:
N = F / Fл
, (4.3)
где N - определяемое число ламп;
F - световой поток, F = 33750 Лм;
Fл
- световой поток лампы, Fл
= 4320 Лм.
N = 8 ламп.
При выборе осветительных приборов используем светильники типа ОД. Каждый светильник комплектуется двумя лампами.
Значит требуется для помещения площадью S = 15 м2
четыре светильника типа ОД.
Расчет естественного освещения помещений
Организация правильного освещения рабочих мест, зон обработки и производственных помещений имеет большое санитарно-гигиеническое значение, способствует повышению продуктивности работы, снижения травматизма, улучшения качества продукции. И наоборот, недостаточное освещение усложняет исполнения технологического процесса и может быть причиной несчастного случая и заболевания органов зрения.
Освещение должно удовлетворять такие основные требования:
- быть равномерным и довольно сильным;
- не создавать различных теней на местах работы, контрастов между освещенным рабочем местом и окружающей обстановкой;
- не создавать ненужной яркости и блеска в поле взора работников;
- давать правильное направление светового потока;
Все производственные помещения необходимо иметь светлопрорезы, которые дают достаточное природное освещение. Без природного освещения могут быть конференц-залы заседаний, выставочные залы, раздевалки, санитарно-бытовые помещения, помещения ожидания медицинских учреждений, помещений личной гигиены, коридоры и проходы.
Коэфициент естественного освещения в соответствии с ДНБ В 25.28.2006, для нашого III пояса светового климата составляет 1,5.
Исходя из этого произведем расчет необходимой площади оконных проемов.
Расчет площади окон при боковом освещении определяется, по формуле:
Sо
= (Ln
*Кз.
*N0
*Sn
*Кзд.
)/(100 *T0
*r1) (4.4)
где:Ln
– нормированное значение КЕО
Кз
– коэффициент запаса (равен 1,2)
N0
– световая характеристика окон
Sn
– площадь достаточного естественного освещения
Кзд.
– коэффициент, учитывающий затенение окон противостоящими зданиями
r1 – коэффициент, учитывающий повышение КЕО при боковом освещении
T0
– общий коэффициент светопропускания, который рассчитывается по формуле:
T0
= T1
* T2
* T3
* T4
* T5,
(4.5)
где T1
– коэффициент светопропускания материала;
T2
– коэффициент, учитывающий потери света в переплетах светопроема;
T3
– коэффициент, учитывающий потери света в несущих конструкциях;
T4
– коэффициент, учитывающий потери света в солнцезащитный устройствах;
T5
– коэффициент, учитывающий потери света в защитной сетке, устанавливаемой под фонарями, принимается равным 1;
Теперь следует рассчитать боковое освещение для зоны, примыкающей к наружной стене. По разряду зрительной работы нужно определить значение КЕО. КЕО = 1,5 нормированное значение КЕО с учетом светового климата необходимо вычислить по формуле:
Ln
=l*m*c, (4.6)
где l – значение КЕО (l=1.5);
m – коэффициент светового климата (m=1);
c – коэффициент солнечности климата (c=1)
Ln
=1,5
Теперь следует определить отношение длины помещения Ln
к глубине помещения B:
Ln
/B=3/5 =0,6;
Отношение глубины помещения В к высоте от уровня условной рабочей поверхности до верха окна h1
(в данном случае h1
=1,8) :
B/h1
=5/1,8 = 2,77.
Световая характеристика световых проемов N0
=9.
Кзд
=1
Значение T0
=0,8*0,7*1*1*1=0,56.
Ln
для 4 разряда зрительных работ равен 1,5 при мытье окон два раза в год.
Определяем r1, r1=1,5.
Кз.
=1,2.
Теперь следует определить значение Sп
:
Sп
=Ln
*В=3*15=15 м2
.
Кзд.
=1.
На данном этапе следует рассчитать необходимую площадь оконных проемов: (Ln
* Кз.
*N0
*Sn
*Кзд.
) / (100*T0
*r1)
Sо
= (1,5*1,2*9*15*1)/(100*0,56*1,5)=243/84= 2,89 м2
;
Принимаем количество окон 1 штука:
S1
=2,89 м2
площадь одного окна
Высота одного окна составляет – 1,5 м, ширина 1,92 м.
Выбираем размеры окна 1,5 х 2,0 м.
4.5 Расчет вентиляции
В зависимости от способа перемещения воздуха вентиляция бывает естественная и принудительная.
Параметры воздуха, поступающего в приемные отверстия и проемы местных отсосов технологических и других устройств, которые расположены в рабочей зоне, следует принимать в соответствии с ГОСТ 12.1.005-76. При размерах помещения 3 на 5 метров и высоте 3 метра, его объем 45 куб.м. Следовательно, вентиляция должна обеспечивать расход воздуха в 90 куб.м/час. В летнее время следует предусмотреть установку кондиционера с целью избежания превышения температуры в помещении для устойчивой работы оборудования. Необходимо уделить должное внимание количеству пыли в воздухе, так как это непосредственно влияет на надежность и ресурс эксплуатации ЭВМ.
Мощность (точнее мощность охлаждения) кондиционера является главной его характеристикой, от неё зависит на какой объем помещения он рассчитан. Для ориентировочных расчетов берется 1 кВт на 10 м2
при высоте потолков 2,8 – 3 м (в соответствии со СНиП 2.04.05-86 "Отопление, вентиляция и кондиционирование").
Для расчета теплопритоков данного помещения использована упрощенная методика:
Q=S·h·q(4.8)
где:Q – Теплопритоки
S – Площадь помещения
h – Высота помещения
q – Коэффициент равный 30-40 вт/м3
(в данном случае 35 вт/м3
)
Для помещения 15 м2
и высотой 3 м теплопритоки будут составлять:
Q=15·3·35=1575 вт
Кроме этого следует учитывать тепловыделение от оргтехники и людей, считается (в соответствии со СНиП 2.04.05-86 "Отопление, вентиляция и кондиционирование") что в спокойном состоянии человек выделяет 0,1 кВт тепла, компьютер или копировальный аппарат 0,3 кВт, прибавив эти значения к общим теплопритокам можно получить необходимую мощность охлаждения.
Qдоп
=(H·Sопер
)+(С·Sкомп
)+(P·Sпринт
) (4.9)
где:Qдоп
– Сумма дополнительных теплопритоков
C – Тепловыделение компьютера
H – Тепловыделение оператора
D – Тепловыделение принтера
Sкомп
– Количество рабочих станций
Sпринт
– Количество принтеров
Sопер
– Количество операторов
Дополнительные теплопритоки помещения составят:
Qдоп1
=(0,1·2)+(0,3·2)+(0,3·1)=1,1(кВт)
Итого сумма теплопритоков равна:
Qобщ1
=1575+1100=2675 (Вт)
В соответствии с данными расчетами необходимо выбрать целесообразную мощность и количество кондиционеров.
Для помещения, для которого ведется расчет, следует использовать кондиционеры с номинальной мощностью 3,0 кВт.
4.6 Расчет уровня шума
Одним из неблагоприятных факторов производственной среды в ИВЦ является высокий уровень шума, создаваемый печатными устройствами, оборудованием для кондиционирования воздуха, вентиляторами систем охлаждения в самих ЭВМ.
Для решения вопросов о необходимости и целесообразности снижения шума необходимо знать уровни шума на рабочем месте оператора.
Уровень шума, возникающий от нескольких некогерентных источников, работающих одновременно, подсчитывается на основании принципа энергетического суммирования излучений отдельных источников:
∑L = 10·lg (Li∙n), (4.10)
где Li – уровень звукового давления i-го источника шума;
n – количество источников шума.
Полученные результаты расчета сравнивается с допустимым значением уровня шума для данного рабочего места. Если результаты расчета выше допустимого значения уровня шума, то необходимы специальные меры по снижению шума. К ним относятся: облицовка стен и потолка зала звукопоглощающими материалами, снижение шума в источнике, правильная планировка оборудования и рациональная организация рабочего места оператора.
Уровни звукового давления источников шума, действующих на оператора на его рабочем месте представлены в табл. 4.6.
Обычно рабочее место оператора оснащено следующим оборудованием: винчестер в системном блоке, вентилятор(ы) систем охлаждения ПК, монитор, клавиатура, принтер и сканер.
Подставив значения уровня звукового давления для каждого вида оборудования в формулу (4.4) , получим:
Таблица 4.6 - Уровни звукового давления различных источников
| Источник шума |
Уровень шума, дБ |
| Жесткий диск |
40 |
| Вентилятор |
45 |
| Монитор |
17 |
| Клавиатура |
10 |
| Принтер |
45 |
| Сканер |
42 |
∑L=10·lg(104+104,5+101,7+101+104,5+104,2)=49,5 дБ
Полученное значение не превышает допустимый уровень шума для рабочего места оператора, равный 65 дБ (ГОСТ 12.1.003-83). И если учесть, что вряд ли такие периферийные устройства как сканер и принтер будут использоваться одновременно, то эта цифра будет еще ниже. Кроме того при работе принтера непосредственное присутствие оператора необязательно, т.к. принтер снабжен механизмом автоподачи листов.
В данном разделе дипломной работы были изложены требования к рабочему месту инженера - программиста. Созданные условия должны обеспечивать комфортную работу. На основании изученной литературы по данной проблеме, были указаны оптимальные размеры рабочего стола и кресла, рабочей поверхности, а также проведен выбор системы и расчет оптимального освещения производственного помещения, произведен расчет рационального кондиционирования помещения, а также расчет уровня шума на рабочем месте. Соблюдение условий, определяющих оптимальную организацию рабочего места инженера - программиста, позволит сохранить хорошую работоспособность в течение всего рабочего дня, повысит как в количественном, так и в качественном отношениях производительность труда программиста, что в свою очередь будет способствовать быстрейшей разработке и отладке программного продукта.
Выводы
В данном проекте был разработаны ИК пульт и приемник дистанционного управления.
В процессе разработки были рассмотрены общие вопросы разработки устройств на микроконтроллерах, рассмотрены этапы разработки, разработка программного обеспечения, внедрения в производство. На основании изученной литературы и сети Интернет получили теоретические знания в области проектирования устройств на микроконтроллерах, приобрели теоретические знания работы системы ИК дистанционного управления.
В практической части были разработаны структурная, функциональная и принципиальная схемы устройства, составлен алгоритм работы микроконтроллера, выбран микроконтроллер удовлетворяющий требованиям ТЗ, произведен расчет элементной базы устройства, произведено подробное описание программы.
В экономической части был произведен расчет себестоимости проектируемого изделия и его ПО, сделан вывод о целесообразности изготовления данного устройства.
В последнем разделе дипломной работы были изложены требования охраны труда. Созданные условия должны обеспечивать комфортную работу. На основании изученной литературы по данной проблеме, были указаны оптимальные размеры рабочего стола и кресла, рабочей поверхности, а также проведен выбор системы и расчет оптимального освещения производственного помещения, произведен расчет рационального кондиционирования помещения, а также расчет уровня шума на рабочем месте. Соблюдение условий, определяющих оптимальную организацию рабочего места, позволит сохранить хорошую работоспособность в течение всего рабочего дня.
Перечень
ссылок
1. "Dimmable Fluorescent Ballast" – User Guide, 10/07, Atmel Corporation, http://www.atmel.com/dyn/resources/prod_documents/doc7597.pdf
2. ГОСТ13109-97. Нормы качества электрической энергии в системах электроснабжения общего назначения.
3. G. Howell "Five questions about resistors" // EDN, 9/28/2006, http://www.edn.com/contents/images/6372835.pdf
4. П. Хоровиц, У. Хилл "Искусство схемотехники" – Изд. 6-е, М.: Мир, 2003.
5. C. Hillman "Common mistakes in electronic design" // EDN, 12/14/2007 http://www.edn.com/contents/images/6512156.pdf
6."Frequently asked questions about dimmers" // http://www .lutron.com/product_technical/faq.asp
7. Л.Н. Кечиев, Е.Д. Пожидаев "Защита электронных средств от воздействия статического электричества" – М.: ИД "Технологии", 2005.
8. Жидецкий В.Ц., Джигирей В.С., Мельников А.В. Основы охраны труда: Учебник – Львов, Афиша, 2008 – 351с.
9. Денисенко Г.Ф. Охрана труда: Учебн.пособие – М., Высшая школа, 1989 – 319с.
10. Самгин Э.Б. Освещение рабочих мест. – М.: МИРЭА, 1989. – 186с.
11. Справочная книга для проектирования электрического освещения. / Под ред. Г.Б. Кнорринга. – Л.: Энергия, 1976.
12. Борьба с шумом на производстве: Справочник / Е.Я. Юдин, Л.А. Борисов;
Под общ. ред. Е.Я. Юдина – М.: Машиностроение, 1985. – 400с., ил.
13. Зинченко В.П. Основы эргономики. – М.: МГУ, 1979. – 179с.
14.Методичні вказівки до виконання дипломної роботи для учнів спеціальності «Оператор комп’ютерного набору; оператор комп’ютерної верстки»/ Упоряд.: Д.О. Дяченко, К.О. Ізмалкова, О.Г. Меркулова. – Сєверодонецьк: СВПУ, 2007. – 40 с.
15. Н. Заец. Многофункциональные часы. — Схемотехника, 2006, № 2,с. 41,42.
16. Н. Заец. Термометр - часы с датчиками фирмы DallasSemiconductor. — Схемотехника, 2005, № 5, с. 52 - 55.
17. Н. Заец. Радиолюбительские конструкции на Р1С-микроконтроллерах. Книга 3. — М.: СОЛОН-Пресс, 2005, с. 248.
18. Н. Заец. Отечественные жидкокристаллические индикаторы TIC9162 с драйверами по технологии COG. - Схемотехника, 2005, №9, с. 9-11.
19. Н. Заец. Таймеры десятичного счета. — Электрик, 2006, № 7-8, с. 36 -39.
20. Мощные полевые переключательные транзисторы фирмы InternationalRectifier. — Радио, 2001, № 5, с. 45.
21. А. Долгий. Разработка и отладка устройств на микроконтроллерах. — Радио, 2001 ,№ 5-12, 2002, № 1.
22. А. Долгий. Программаторы и программирование микроконтроллеров. — Радио, 2004, № 1-12.
23. Н. Заец. Универсальный таймер. — Схемотехника, 2003, № 1, с. 53.
24. Н. Заец. Электронные самоделки для быта, отдыха и здоровья.— М.: СОЛОН-Пресс, 2009, 423 с.
Приложения
Приложение А
Микроконтроллеры
PIC
12
F
629/675
Организация памяти программ
Микроконтроллеры PIC12F629/675 имеют 13-разрядный счетчик команд PC, способный адресовать 8К х 14 слов памяти программ. Физически реализовано в PIC12F629/675 1К х 14 f0000h-03FFh) памяти программ. Обращение к физически не реализованной памяти программ приведет к адресации реализованной памяти в адресном пространстве 0000h-03FFh. Адрес вектора сброса - OOOOh. Адрес вектора прерываний - 0004h ( рисунок 1).

Рисунок 1-Организация памяти программ и стека в микроконтроллерах PIC12F629/675
Электрические характеристики
Предельная рабочая температура ...............................................от -40°Сдо +125°С
Температура хранения..............................................................от -65°С до +150°С
Напряжение Vdd относительно Vss............................................от -0.3Вдо +6.5В
Напряжение -MCLR относительно Vss..........................................отОВдо+13.5В
Напряжение на остальных выводах относительно Vss...... от -0.3В до Vdd+О.ЗВ
Рассеиваемая мощность (1)......................................................................... ..0.8Вт
Максимальный ток вывода Vss................................................................ 300мА
Максимальный ток вывода Vdd............................................................... 250мА
Входной запирающий ток Іік (V < 0 или V > Vdd).................................. ±20мА
Выходной запирающий ток Ьк (Vo < 0 или Vo > Vdd)........................... +20мА
Максимальный выходной ток стока канала ввода/вывода.........................25мА
Максимальный выходной ток истока канала ввода/вывода.......................25мА
Максимальный выходной ток стока портов ввода/вывода GPIO………. 125мА
Максимальный выходной ток истока портов ввода/вывода GPIO………125мА
Система команд
В PIC12F629/675 система команд аккумуляторного типа, ортогональна и разделена на три основных группы:
• Байт ориентированные команды
• Бит ориентированные команды
• Команды управления и операций с константами
Каждая команда состоит из одного 14 - разрядного слова, разделенного на код операции (OPCODE), определяющий тип команды и один или несколько операндов, определяющие операцию команды.
Таблица 1 - Список команд микроконтроллеров PIC12F629/675
| Мнемоника команды |
Описание |
Циклов |
14-разрядный код |
Изм. флаги |
Прим. |
| Бит 13 БитО |
| Байт ориентированные команды |
| ADDWF f,d |
Сложение W и f |
1 |
00 0111dfff ffff |
C,DC,Z |
1,2 |
| ANDWF f,d |
Побитное 'И' W и f |
1 |
00 0101 dfff ffff |
z |
1,2 |
| CLRF f |
Очистить f |
1 |
00 0001Ifff ffff |
z |
2 |
| CLRW |
Очистить W |
1 |
00 0001Oxxx xxxx |
z |
| COMF f,d |
Инвертировать f |
1 |
00 1001 dfff ffff |
z |
1,2 |
| DECF f,d |
Вычесть 1 из f |
1 |
00 0011 dfff ffff |
z |
1,2 |
| DECFSZ f,d |
Вычесть 1 из f и пропустить если 0 |
1(2) |
00 1011 dfff ffff |
1,2,3 |
| INCF f,d |
Прибавить 1 к f |
1 |
00 1010 dfff ffff |
z |
1,2 |
| INCFSZ f,d |
Прибавить 1 к f и пропустить если 0 |
1(2) |
00 1111 dfff ffff |
1,2,3 |
| IORWF f,d |
Побитное 'ИЛИ' W и f |
1 |
00 0100 dfff ffff |
z |
1,2 |
| MOVF f,d |
Переслать f |
1 |
00 1000 dfff ffff |
z |
1,2 |
| MOVWF f |
Переслать W в f |
1 |
00 0000 lfff ffff |
| NOP |
Нет операции |
1 |
rsП Л Г\ г, .... г. n0 г» р |
| RLF f,d |
Циклический сдвиг f влево через перенос |
1 |
00 1101 dfff ffff |
с |
1,2 |
| RRF f,d |
Циклический сдвиг f вправо через перенос |
1 |
00 1100 dfff ffff |
с |
1.2 |
| SUBWF f,d |
Вычесть W из f |
1 |
00 0010 dfff ffff |
C,DC,Z |
1,2 |
| SWAPF f,d |
Поменять местами полубайты в регистре f |
1 |
00 1110 dfff ffff |
1,2 |
| XORWF f,d |
Побитное 'исключающее ИЛИ' W и f |
1 |
00 0110 dfff ffff |
z |
1,2 |
| Бит ориентированные команды |
| BCF f,b |
Очистить бит b в регистре f |
1 |
01 OObb bfff ffff |
1,2 |
| BSF f,b |
Установить бит b в регистре f |
1 |
01 Olbb bfff ffff |
1,2 |
| BTFSC f,b |
Проверить бит b в регистре f, пропустить если 0 |
1(2) |
01 lObb bfff ffff |
3 |
| BTFSS f,b |
Проверить бит b в регистре f, пропустить если 1 |
1(2) |
01 llbb bfff ffff |
3 |
| Команды управления и операций с константами |
| ADDLW к |
Сложить константу с W |
1 |
11lllx kkkk kkkk |
C,DC,Z |
| ANDLW к |
Побитное 'И' константы и W |
1 |
11 1001 kkkk kkkk |
z |
| CALL к |
Вызов подпрограммы |
2 |
10 Okkk kkkk kkkk |
| CLRWDT |
Очистить WDT |
1 |
00 0000 0110 0100 |
-TO.-PD |
| GOTO к |
Безусловный переход |
2 |
10lkkk kkkk kkkk |
| IORLW к |
Побитное 'ИЛИ' константы и W |
1 |
11 1000 kkkk kkkk |
z |
| MOVLW к |
Переслать константу в W |
1 |
| RETFIE |
Возврат из подпрограммы с разрешением прерываний |
2 |
00 0000 0000 1001 |
| RETLW к |
Возврат из подпрограммы с загрузкой константы в W |
2 |
11 Olxx kkkk kkkk |
| RETURN |
Возврат из подпрограммы |
2 |
00 0000 0000 1000 |
| SLEEP |
Перейти в режим SLEEP |
1 |
00 0000 0110 0011 |
-TO.-PD |
| SUBLW к |
Вычесть W из константы |
1 |
11 HOx kkkk kkkk |
C,DC,Z |
| XORLW к |
Побитное 'исключающее ИЛИ' константы и W |
1 |
11 1010 kkkk kkkk |
z |
 |
Рисунок 2- Чертежи корпусов
Таблица 2 – Размеры корпусов
| Единицы измерения |
Дюймы* |
Миллиметры |
| Пределы размеров |
Мин. |
Ном. |
Макс. |
Мин. |
Ном. |
Макс. |
| Число выводов |
п |
8 |
8 |
| Расстояние между выводами |
Р |
0.100 |
2.54 |
| Ширина нижней части вывода |
В |
0.014 |
0.018 |
0.022 |
0.36 |
0.46 |
0.56 |
| Ширина верхней части вывода |
В1 |
0.045 |
0.058 |
U.070 |
1.14 |
1.40 |
1.?а |
| Радиус сгиба вывода |
R |
0.000 |
0.005 |
0.010 |
0.00 |
0.13 |
0.25 |
| Толщина вывода |
с |
0.008 |
0.012 |
0.015 |
0.20 |
0.29 |
0.38 |
| Высота корпуса |
А |
0.140 |
0.155 |
0.170 |
3.56 |
3.94 |
4.32 |
| Толщина корпуса |
А2 |
0.115 |
0.130 |
0.145 |
2.92 |
3.30 |
3.68 |
| Расстояние между корпусом и платой |
А1 |
0.015 |
0.38 |
| Длина нижней части вывода |
L |
0.125 |
0.130 |
0.135 |
3.18 |
3.30 |
3.43 |
| Длина корпуса |
D |
0.360 |
0.373 |
0.385 |
9.14 |
9.46 |
9.78 |
| Ширина корпуса |
Е |
0.300 |
0.313 |
0.325 |
7.62 |
7.94 |
8.26 |
| Ширина корпуса без выводов |
Е1 |
0.240 |
0.250 |
0.260 |
6.10 |
6.35 |
6.60 |
| Полная ширина корпуса с выводами |
еВ |
0.310 |
0.370 |
0.430 |
7.87 |
9.40 |
10.92 |
| Угол фаски верхней части корпуса |
а |
5 |
10 |
15 |
5 |
10 |
15 |
| Угол фаски нижней части корпуса |
в |
5 |
10 |
15 |
5 |
10 |
15 |
Приложение Б
;****** СКАНИРОВАНИЕ КЛАВИАТУРЫ ************************************************
Scan btfss GPIO,5 ; если на входе GP5 низкий уровень - нажата клавиша 1
goto Tx_CMD1
btfss GPIO,2 ; если на входе GP2 низкий уровень - нажата клавиша 2
goto Tx_CMD2
btfss GPIO,4 ; если на входе GP4 низкий уровень - нажата клавиша 3
goto Tx_CMD3
btfss GPIO,1 ; если на входе GP1 низкий уровень - нажата клавиша 4
goto Tx_CMD4
bsf MBC,5 ; установить управляющий бит в 1 (первое нажатие)
goto Scan
;****** ФОРМИРОВАНИЕ МЛАДШЕГО БАЙТА ПАКЕТА ****************************
Tx_CMD1 movlw CMD_1
movwf LBC ;запись номера команды 1 в младший разряд кода
goto TxRC
;********************************************
Tx_CMD2 movlw CMD_2
movwf LBC ;запись номера команды 2 в младший разряд кода
goto TxRC
;********************************************
Tx_CMD3 movlw CMD_3
movwf LBC ;запись номера команды 3 в младший разряд кода
goto TxRC
;********************************************
Tx_CMD4 movlw CMD_4
movwf LBC ;запись номера команды 4 в младший разряд кода
goto TxRC
;******* ПЕРЕДАЧА ПАКЕТА RC-5 *********************************************************
TxRC btfsc MBC,7 ; Startbit 1. Если он равен 1, то выполняется Tx_1,
call Tx_1 ; если он равен нулю, то выполняется Tx_0
btfss MBC,7 ; аналогично остальные биты
call Tx_0
;--------------------------------
btfsc MBC,6 ; Startbit 2
call Tx_1
btfss MBC,6
call Tx_0
;--------------------------------
btfsc MBC,5 ; Toggle bit
call Tx_1
btfss MBC,5
call Tx_0
;--------------------------------
btfsc MBC,4 ; System bit 4
call Tx_1
btfss MBC,4
call Tx_0
;--------------------------------
btfsc MBC,3 ; System bit 3
call Tx_1
btfss MBC,3
call Tx_0
;--------------------------------
btfsc MBC,2 ;System bit 2
call Tx_1
btfss MBC,2
call Tx_0
;--------------------------------
btfsc MBC,1 ;System bit 1
call Tx_1
btfss MBC,1
call Tx_0
;--------------------------------
btfsc MBC,0 ;System bit 0
call Tx_1
btfssMBC,0
callTx_0
;--------------------------------
btfsc LBC,5 ;Command bit 5
call Tx_1
btfss LBC,5
call Tx_0
;--------------------------------
btfsc LBC,4 ;Command bit 4
call Tx_1
btfss LBC,4
call Tx_0
;--------------------------------
btfsc LBC,3 ;Command bit 3
call Tx_1
btfss LBC,3
call Tx_0
;--------------------------------
btfsc LBC,2 ;Command bit 2
call Tx_1
btfss LBC,2
call Tx_0
;--------------------------------
btfsc LBC,1 ;Command bit 1
call Tx_1
btfss LBC,1
call Tx_0
;--------------------------------
btfsc LBC,0 ;Command bit 0
call Tx_1
btfssLBC,0
callTx_0
bcf MBC,5 ; установить управляющий бит в 0 (повторное нажатие)
;****** ПАУЗА, РАВНАЯ МЕЖПАКЕТНОМУ ИНТЕРВАЛУ ****************************************
;****** Пауза между пакетами равна 50 bit, т.е. надо послать 100 нулевых полубитов (RCN) ********
movlw .99 ; здесь записано 99, а не 100, т.к. далее call стоит раньше декремента
movwf T_0
pause call RCN
decfsz T_0,F ; декремент T_0
goto pause
goto Scan
;********КОНЕЦ ОСНОВНОЙ ПРОГРАММЫ ***************************************************************
;******* ПОДПРОГРАММЫ ПЕРЕДАЧИ НУЛЯ И ЕДИНИЦЫ ***********************************************
;******* Передача нуля манчестерским кодом **********************
Tx_0 call RCY ; первые полбита единица
call RCN ; вторые полбита ноль
return
;******* Передача единицы манчестерским кодом *******************
Tx_1 call RCN ; первые полбита ноль
call RCY ; вторые полбита единица
return
;*********************************************************************************************
;***** ПОДПРОГРАММЫ ФОРМИРОВАНИЯ СОСТОЯНИЙ "ON" И "OFF" ***********************
;***** Передача единичного полубита ("ON") ******************
RCY movlw NCr ; поместить константу NCr в аккумулятор
movwf T_NC ; скопировать содержимое аккумулятора в регистр T_NC
Y_001 movlw Cr1 ; поместить константу Cr1 в аккумулятор (изменяя Cr1 и Cr0 можно грубо подстраивать частоту несущей)
movwf T_Cr ; поместить содержимое аккумулятора в регистр T_Cr (таймер несущей)
bsf GPIO,0 ; установить на выходе защелки GP0 единицу (установить 1 на выходе)
Cr1_Y decfsz T_Cr,F ; декремент содержимого регистра T_Cr с ветвлением: если f=0 - результат
; сохраняется в аккумуляторе, если f=1 - результат сохраняется в регистре T_Cr.
; Если результат не равен 0, то исполняется следующая инструкция, если равен 0,
; то вместо следующей инструкции исполняется nop, а команда исполняется за 2 м.ц.
goto Cr1_Y ; переход на метку Cr1_Y
nop ; увеличивая здесь длительность паузы (добавляя еще nop) - можно точно подстраивать чатоту несущей
bcf GPIO,0 ; Установить на выходе защелки GP0 ноль (установить 0 на выходе)
movlw Cr0 ; поместить константу Cr0 в аккумулятор (изменяя Cr1 и Cr0 можно грубо подстраивать частоту несущей)
movwf T_Cr ; скопировать содержимое аккумулятора в регистр T_Cr
local Cr0_Y
Cr0_Y decfsz T_Cr,F
goto Cr0_Y ; увеличивая здесь длительность паузы (добавляя еще nop) - можно точно подстраивать чатоту несущей
decfsz T_NC,F
goto Y_001
return
;***** Передача нулевого полубита ("OFF") *******************
RCN movlw NCr ; подпрограмма передачи нулевого полубита имеет
movwf T_NC ; ту же структуру, что и подпрограмма передачи единичного
local N_001 ; полубита только для того, чтобы было легче регулировать
N_001 movlw Cr1 ; их длительности
movwf T_Cr
nop ; вместоbsfGP0
local Cr1_N
Cr1_N decfsz T_Cr,F
goto Cr1_N
nop
nop ; вместо bсf GP0
movlw Cr0
movwf T_Cr
local Cr0_N
Cr0_N decfsz T_Cr,F
goto Cr0_N
decfsz T_NC,F
goto N_001
return
;***********************************************************************************************
end
;------------------------------------------------------------------------------------------------------------------------------
Приложение В
Программа прошивки микроконтроллера
PIC
12
F
629 для ИК приемника дистанционного управления
;------------------------------------------------------------------------------------------------------------------------------
list p = 12f629
__config 01FE4h ; 01111 11 1 1 0 0 100 - (7,8)защиты памяти нет, (6)сброс по питанию разрешен,
; (5)GP3/-MCLR работает как -MCLR, (4)PWRT включен, (3)WDT - выключен, (2-0)генератор - внутренний
;********* Переменные ************************************
CBLOCK 0x20 ; Начальный адрес
MBC ; старший байт посылки (полбита - 889uS)
LBC ; младший байт посылки
Schetchik ; счетчик принятых бит
Prov_reg ; регистр для проверки на манчестер (сюда пишем три последних принятых бита)
Adrbit ; адрес бита для записи
Counter ; счетчик для паузы
ENDC ;
;******** Константы ***************************************
T1 equ .205 ; задержка 1
T2 equ .204 ; задержка 2
TP equ .255 ; задержка между приемом посылок
TN equ .125 ; начальная задержка, чтобы попасть на середину полубита
Sys equ .29 ; номер системы
CMD_1 equ .8 ; код команды 000010 00 последние 2 бита не используются, т.е. команда = 2
INDF equ 0h ; регистр косвенной адресации
Status equ 03h ; Регистр выбора банка.
FSR equ 04h ; регистр адреса при косвенной адресации
GPIO equ 05h ; Регистр управления защелками порта.
Cmcon equ 19h ; Регистр Cmcon - компаратора
TrisIO equ 05h ; Регистр выбора направления работы выводов порта.
INTCON equ 0Bh ; Регистр разрешения(1)/запрета(0) прерываний
IOCB equ 16h ; регистр разрешения прерываний по GP0...GP5
OSCCAL equ 10h ; Регистр хранения калибровочной константы
F equ 1 ; Результат направить в регистр.
;********************************************************
; Пусть у нас GP0 (1-й кр), GP1(2-й кр), GP2(жел), GP4(зел) - выходы на транзисторы управления светодиодов, GP5 - вход ИК-приемника
;********************************************************
org 0
goto start
org 4
;********* ПРЕРЫВАНИЕ *************************************************************
btfsc GPIO,5 ; если вход не = 0, то это не начало приема
goto exit
;********* Установить счетчик принятых бит **********************************************
movlw .1 ;
movwf Schetchik ; 3-й бит определяет - куда пишем, если 1, то в MBC, если 0, то в LBC
;********* Установить адрес бита для записи = 7 (поднять 7-й бит) ***********************
movlw .128
movwf Adrbit
;********* Заполняем три младших бита проверочного регистра нулями *****************
clrf Prov_reg
;********* Установить адрес регистра для записи в регистр косвенной адресации (сначала пишем в MBC) ***
movlw MBC ; записываем адрес MBC в регистр косвенной адресации
movwf FSR ;
;********* Начальная задержка ****************************************
movlw TN
movwf Counter
nach_zad nop
decfsz Counter,1
goto nach_zad
;********* ЗАПИСЬБАЙТА *****************************************************************
;*********Второй полубит n-го бита **********************************************************
;********* Проверить вход и записать принятый полубит (один полубит пишем, другой - пропускаем) **
zapis btfss GPIO,5 ; если на входе GP5 низкий уровень - пишем единицу (выполняем следующую команду)
goto zapis1
zapis0 comf Adrbit,0 ; записываем позицию бита, которую будем менять
andwf INDF,1 ; побитное "и", - ставим ноль в позиции, указанной в Adrbit
bcf Status,0 ; очищаем флаг переноса
rlf Prov_reg,1 ; сдвигаем биты в проверочном регистре влево
movlw .7 ; .7 = 00000111
andwf Prov_reg,1 ; сбрасываем все биты кроме первых трех
bcf Prov_reg,0 ; в нулевой бит проверочного регистра пишем ноль
goto sdvig
zapis1 movf Adrbit,0
iorwf INDF,1 ; побитное "или", - ставим единицу в позиции, указанной в Adrbit
bcf Status,0 ; очищаем флаг переноса
rlf Prov_reg,1 ; сдвигаем биты в проверочном регистре влево
movlw .7 ; .7 = 00000111
andwf Prov_reg,1 ; сбрасываем все биты кроме первых трех
bsf Prov_reg,0 ; в нулевой бит проверочного регистра пишем единицу
;******** меняем адрес записи бита *************************************************
sdvig bcf Status,0 ; очищаем флаг С
rrf Adrbit,1 ; циклический сдвиг вправо через перенос (смещаем позицию)
btfsc Status,0 ; если флаг С = 0, пропускаем следующую команду
bsf Adrbit,7 ; поднимаем 7-й бит (ставим адрес на 7-й бит)
;******** Проверяем на манчестер ****************************************************
movlw .0
xorwf Prov_reg,0 ; проверка - равен ли нулю проверочный регистр
btfsc Status,2 ; если флаг Z = 0, пропускаем следующую команду
goto not_manch
movlw .7
xorwf Prov_reg,0 ; проверка - равен ли 00000111 проверочный регистр
btfsc Status,2 ; если флаг Z = 0, пропускаем следующую команду
goto not_manch
;******** Задержка 1, чтобы общая длительность от метки zapis до окончания задержки равнялась 889 мкс ***
movlw T1
movwf Counter ; загружаемв Counter таймер T1
Count1 nop
decfsz Counter,1
goto Count1
nop
;******** первый полубит n+1-го бита (писать не надо, но для проверки на манчестер - надо) ******
btfss GPIO,5 ; если на входе GP5 низкий уровень - пишем единицу (выполняем следующую команду)
goto zapis12
zapis02 bcf Status,0 ; очищаем флаг переноса
rlf Prov_reg,1 ; сдвигаем биты в проверочном регистре влево
movlw .7 ; .7 = 00000111
andwf Prov_reg,1 ; сбрасываем все биты кроме первых трех
bcf Prov_reg,0 ; в нулевой бит проверочного регистра пишем ноль
goto proverka
zapis12 bcf Status,0 ; очищаем флаг переноса
rlf Prov_reg,1 ; сдвигаем биты в проверочном регистре влево
movlw .7 ; .7 = 00000111
andwf Prov_reg,1 ; сбрасываем все биты кроме первых трех
bsf Prov_reg,0 ; в нулевой бит проверочного регистра пишем единицу
;******** Проверяем на манчестер ****************************************************
proverka movlw .0
xorwf Prov_reg,0 ; проверка - равен ли нулю проверочный регистр
btfsc Status,2 ; если флаг Z = 0, то проверочный регистр не равен нулю - пропускаем следующую команду
goto not_manch
movlw .7
xorwf Prov_reg,0 ; проверка - равен ли 00000111 проверочный регистр
btfsc Status,2 ; если флаг Z = 0, пропускаем следующую команду
goto not_manch
;******** Задержка 2, чтобы общая длительность от чтения этого полубита до чтения следующего равнялась 889 мкс ***
movlw T2
movwf Counter ; загружаемв Counter таймер T2
Count2 nop
decfsz Counter,1
goto Count2
nop
;******** Сколько бит записали? ******************************************************
movlw .14
xorwf Schetchik,0 ; счетчик = 14?
btfsc Status,2 ; если флаг Z = 0, пропускаем следующую команду
return ; выходим без разрешения прерываний
;****** Если бит 3 счетчика = 1, то мы уже записали 8 бит и следующие надо писать в LBC *****
btfss Schetchik,3 ; если третий бит счетчика равен единице, то следующая инструкция пропускается
goto zap_MBC
zap_LBC movlw LBC ; записываем адрес LBC в регистр косвенной адресации
movwf FSR
goto next
zap_MBC movlw MBC ; записываем адрес MBC в регистр косвенной адресации
movwf FSR
;****** Увеличить счетчик *******************************************************************
next incf Schetchik,1 ; увеличиваем счетчик
goto zapis
;****** Погасить все, зажечь первый красный *************************************************
not_manch bcf GPIO, 1 ; погасить второй красный светодиод
bcf GPIO, 2 ; погасить желтый светодиод
bcf GPIO, 4 ; погасить зеленый светодиод
bsf GPIO, 0 ; зажечь первый красный светодиод
;******* Сбросить признак принятия посылки **************************************
bcf MBC,7
;********* Сбросить флаг прерываний и выйти *************************************
exit bcf INTCON,0
retfie
;******** КОНФИГУРИРОВАНИЕ КОНТРОЛЛЕРА *********************************************
;*** Необходимо помнить, что калибровочные константы стираются при программировании, **********
;*** поэтому их надо сохранять, OSCCAL хранится по адресу 03FFh, биты калибровки схемы BOR - *
;*** 12-й,13-й биты слова конфигурации (в моем случае BOR - 01, OSCCAL - 346C)*****************
;****** Калибровка Генератора *****************************************************************
start bsf Status,5
Call 3FFh ; Загрузить калибровочную константу в w
movwf OSCCAL
;******** Установка направления работы GP5 - на вход, а GP4-GP0 - на выход ********************
bcf Status,5 ; перейти в банк 0
clrf GPIO ; инициализация защелок (нули на всех защелках, кроме GP5)
movlw .7 ; биты 0..2 поднять
movwf Cmcon ; компаратор выключен, GP0, GP1, GP2 - цифровые вх/вых
clrf LBC
clrf MBC
bsf Status,5 ; Перейти в 1-й банк (установить в 1 5-й бит регистра Status).
movlw .40 ; Пишем конф-ю GPIO в аккум. (W) .40=00 101000 GP0, GP1, GP2, GP4 - выходы, остальные - входы
movwf TrisIO ; Скопировать конфигурацию GPIO из W в регистр TrisIO.
;****** Разрешить прерывания на входе GP5 *****************************************************
movlw .32 ; .32 = 00100000
movwf IOCB ; разрешить прерывание на входе GP5, на остальных - нет
bcf Status,5 ; Перейти в 0-й банк (установить в 0 5-й бит регистра Status).
movlw .8 ; .8 = 00001000
movwf INTCON ; разрешить прерывание от GPIO
bsf INTCON,7 ; разрешить прерывания
nop
;****** Сканирование наличия принятой информации ***********************************************
Scan btfsc MBC,7 ; если start бит (7-й) в регистре MBC = 1, то была принята информация (первый старт бит = 1)
goto rab_chast ;
goto Scan
;******* РАБОЧАЯЧАСТЬ ***************************************************************
;******* Проверка номера системы **********************************************************
rab_chast movf MBC,0
andlw .31 ; побитное "И" с 00011111 - отрезаем стартовые и управляющий биты
xorlw Sys
btfss Status,2 ; если Z=1, то следующая инстр-я не выполняется (номер совпадает с заданным)
goto nosys ;
;******* Проверка номера команды *********************************************************
movlw CMD_1
xorwf LBC,0
btfss Status,2 ; если Z=1, то следующая инструкция не выполняется
goto nocom
;****** Погасить все, зажечь зеленый *******************************************************
bcf GPIO, 0 ; погасить первый красный светодиод
bcf GPIO, 1 ; погасить второй красный светодиод
bcf GPIO, 2 ; погасить желтый светодиод
bsf GPIO, 4 ; зажечь зеленый светодиод
goto out
;****** Погасить все, зажечь второй красный ***********************************************
nosys bcf GPIO, 0 ; погасить первый красный светодиод
bcf GPIO, 2 ; погасить желтый светодиод
bcf GPIO, 4 ; погасить зеленый светодиод
bsf GPIO, 1 ; зажечь второй красный светодиод
goto out
;******* Погасить все, зажечь желтый ********************************************************
nocom bcf GPIO, 0 ; погасить первый красный светодиод
bcf GPIO, 1 ; погасить второй красный светодиод
bcf GPIO, 4 ; погасить зеленый светодиод
bsf GPIO, 2 ; зажечь желтый светодиод
;******* Сбросить признак принятия посылки и флаг прерывания ******************************
out bcf MBC,7 ; сбрасываем признак принятия посылки
bcf INTCON,0 ; сбрасываем флаг прерывания
;******* Пауза ****************************************************************************
movlw TP
movwf Counter
pause nop
nop
decfsz Counter,1
goto pause
;******* Разрешитьпрерывания **************************************************************
bsf INTCON,7
nop
goto Scan
end
;------------------------------------------------------------------------------------------------------------------------------
Приложение Д

Рисунок 1 - Схема принципиальная электрическая ИК пульта дистанционного управления

Рисунок 2 - Схема принципиальная электрическая ИК приемника дистанционного управления
Приложение Ж
Расчет стоимости основных элементов ИК – пульта

Приложение К
Расчет стоимости основных элементов ИК – приемника

|




