Содержание
Введение
1. Выбор системы электропривода
2. Выбор передаточного устройства
3. Предварительный выбор электродвигателя
4. Разработка схемы и выбор элементов силовой цепи электропривода. Выбор защиты от аварийных режимов
5. Расчёт статических характеристик электропривода
6. Расчёт переходных процессов в электроприводе
7. Анализ правильности выбора мощности двигателя
8. Приложение
10.Индивидуальная исследовательская часть
Список литературы
Введение
Электропривод подачи является неотъемлемым звеном современных металлообрабатывающих станков. Поэтому от технико-экономических характеристик приводов подач будет напрямую зависеть качество производимой продукции.
В последние годы в связи с расширением технологических возможностей станков и в первую очередь многооперационных (обрабатывающих центров), а также освоение нового твёрдосплавного и быстрорежущего инструмента обеспечили возможность проведения на одном станке различных технологических операций: фрезерования, сверления, растачивания и т. д.
Это в свою очередь привело к усложнению электроприводов подач вследствие увеличения вращающего момента на валу двигателя, расширения диапазона рабочих подач и установочных перемещений, увеличения быстродействия привода, как при управляющем воздействии, так и при возмущении по нагрузке и т.д.
В этих условиях существенно начала меняться конструкция станков вследствие сокращения механической части приводов подач. В ряде случаев стала возможной установка высокомоментных двигателей, имеющих меньшие габаритные размеры по сравнению с обычными ДПТ с электромагнитным возбуждением, непосредственно на ходовой винт. Исключение коробки передач привело не только к сокращению механической части электропривода, но также к повышению КПД и снижению момента инерции электромеханического привода, а значит и повышения быстродействия.
Таким образом, основные требования, предъявляемые к современным станочным электроприводам, следующие: минимальные габариты электродвигателей при высоком вращающем моменте; высокая максимальная скорость; значительная перегрузочная способность привода в режимах кратковременной и повторно-кратковременной нагрузки; широкий диапазон регулирования; высокое быстродействие при переходных процессах и т.д.
Как видно из перечисленных, а также многих других требований, совмещение всех их в одном устройстве принципиально невозможно. Поэтому при проектировании и применении станочных электроприводов в каждом конкретном случае удовлетворение одним требованиям достигается в ущерб другим.
1. Выбор системы электропривода
Современный регулируемый электропривод содержит, как правило, статический (электронный) преобразователь электроэнергии (регулятор, коммутатор), с помощью которого обеспечивается экономичное и плавное регулирование параметров движения в широком диапазоне, формирование переходных процессов с заданным качеством, автоматизация процессов управления. Тип управляемого преобразователя, тип электродвигателя, а также способ управляющего воздействия на двигатель определяют в целом систему электропривода.
В электроприводах постоянного тока в качестве управляемых преобразователей чаще всего применяют тиристорные преобразователи (система ТП-Д) и широтно-импульсные регуляторы (система ШИР-Д). Исполнительные двигатели могут быть с независимым возбуждением или с постоянными магнитами, последовательным и смешанным возбуждением. Для двигателей с обмоткой возбуждения существует два канала управления: по цепи якоря и по цепи возбуждения. В первом случае регулирование скорости осуществляют при постоянстве допустимого момента в режиме продолжительной нагрузки, а во втором при постоянстве допустимой мощности.
Реверс электропривода постоянного тока, как правило, осуществляется по цепи якоря либо контакторным реверсором, либо применением реверсивного тиристорного преобразователя. В последнем случае достигается высокое быстродействие электропривода. Иногда для электроприводов большой мощности при отсутствии требований по обеспечению высокого быстродействия применяется реверс по цепи возбуждения. Реверсивный электропривод по системе ШИР-Д обычно выполняется с реверсивным регулятором в цепи якоря.
Выбор системы электропривода возможен на основе сравнительного анализа технических данных, приведенных в таблице 1, и исходных данных на проектирование электропривода с учетом особенностей применения наиболее распространенных систем электропривода.
Таблица 1 Технические показатели систем электропривода
| Наименованиепоказателей |
ТП-Д |
ШИР-Д |
ПЧИ-АД |
НПЧ-АД |
ТРН-АД |
АВК |
| Источникпитания |
~ |
~ / = |
~ / = |
~ |
~ |
~ |
| Регулированиескорости |
вниз1:20вверх3:1 |
вниз1:10 |
вниз1:10вверх2:1 |
вниз1:4* |
вниз1:2** |
вниз 1:2 |
| Диапазонмощностей |
2-1000кВт |
до 10кВт |
5-100кВт |
10-100кВт |
2-150кВт |
50-200кВт |
* - в зоне частотного регулирования 5...20 Гц,
** - для "вентиляторной" нагрузки.
Если техническим требованиям и условиям эксплуатации удовлетворяют несколько систем электропривода, то для окончательного выбора необходима их экономическая оценка.
Диапазон регулирования скорости:
 (вниз) (вниз)
Необходимая полезная средняя мощность двигателя:

Вт.С учётом потерь в элементах кинематической цепи
 Вт. Вт.
Исходя из этих условий выбираем систему  . Основные технико-экономические свойства этой системы приведены в табл. 2. (стоимость приведена в условных единицах). Для реверсивных устройств стоимость практически удваивается. . Основные технико-экономические свойства этой системы приведены в табл. 2. (стоимость приведена в условных единицах). Для реверсивных устройств стоимость практически удваивается.
Таблица 2 Удельная стоимость электрооборудования, усл.ед./кВт
3. Выбор передаточного устройства
Передаточное устройство привода преобразует вращательное движение электродвигателя во вращающееся или поступательное движение исполнительного органа. В современных приводах существует тенденция упрощения передаточного устройства путем исключения промежуточных звеньев в виде редукторов или других механизмов. При этом заметно возрастает точность, быстродействие и надежность привода. Однако для безредукторных приводов часто требуются специальные низкоскоростные двигатели, выпуск которых отечественной промышленностью явно отстает от потребностей современного электропривода. Кроме того, низкоскоростные электродвигатели уступают высокоскоростным по массогабаритным и энергетическим показателям.
Для приводов подачи станков в качестве передаточного устройства обычно используют передачу винт-гайка качения. Преимуществами передач винт-гайка качения является: 1) возможность полного устранения зазора в резьбе и создания натяга, обеспечивающего высокую осевую жесткость, 2) низкие потери на трение; к. п. д. этих передач достигает 0.95, 3) почти полная независимость силы трения от скорости и очень малое трение покоя, что обеспечивает равномерность движения.
Для упрощения передаточного устройства выберем шаг резьбы винта так, чтобы дополнительного редуктора не требовалось, для этого сопоставим номинальную скорость двигателя максимальной скорости рабочего органа:

КПД муфт принимаю равным 0,98.

Рис. 1. Кинематическая схема электропривода.
Основным параметром при расчёте передачи винт-гайка качения является рабочая часть ходового винта:
 м; м;
Определяем параметры винта, при условии  : :
 м; м;
 м; м;
 (однозаходный винт) (однозаходный винт)
Шаг винта сверяем со стандартным рядом, учитывая рекомендации:
 мм. мм.
Исходя из параметров винта определяем параметры передачи винт-гайка качения с натягом :
 мм; мм;
 мм; мм;


К.П.Д. винтовой передачи по:

Радиус приведения к валу двигателя по:
 м. м.
Скорость вращения вала двигателя по :
 об/мин. об/мин.
 об/мин. об/мин.
Приведение скорости рабочего органа к валу двигателя сведено в табл.3
Таблица 3 Скорость рабочего органа и вала двигателя в момент  -ого цикла -ого цикла
|
 |
 |
 |
 |
 |
 |
 |
16 |
40 |
25 |
8 |
120 |
15 |
 мм/с. мм/с. |
50 |
5 |
 |
-50 |
-5 |
|
 рад/c. рад/c. |
83.77 |
8.378 |
|
-83.776 |
-8.378 |
|
 об/мин. об/мин. |
800 |
80 |
|
-800 |
-80 |
|
Момент приведённый к валу двигателя по:

Статический момент на валу двигателя:

Момент трения складывается из:

Коэффициент трения в направляющих качения с танкетками примем по
Сила трения в направляющих:
 Н. Н.
Момент сопротивления на валу двигателя от силы трения в направляющих:
 Н× м. Н× м.
Момент трения в шариковой паре при наличии предварительного натяга:

Количество подшипников ходового винта:

Внутренний диаметр подшипников:
 мм. мм.
Момент от сил трения в подшипниковой паре при наличии предварительного натяга:

Приведение статического момента к валу двигателя сведено в табл. 4.
Статический момент и сила резания в момент -ого цикла
Таблица 4
|
|
|
|
|
|
|
 с с |
 |
 |
 |
 |
120 |
 |
 кН кН |
 |
|
|
-10 |
 |
|
 Н× м Н× м |
7.165 |
28.659 |
|
-7.165 |
-14.33 |
|
 Н× м Н× м |
0.64 |
2.56 |
|
-0.64 |
-1.28 |
|
 Н× м Н× м |
0.052 |
0.206 |
|
0.052 |
0.103 |
|
 Н× м Н× м |
0.762 |
2.837 |
0 |
-0.762 |
-1.453 |
0 |
 Н× м Н× м |
7.927 |
31.496 |
0 |
-7.927 |
-15.783 |
0 |
 Н× м; Н× м;
С учётом этого, кратность максимального момента
 . .
Что приемлемо, с учётом того, что максимальная нагрузка действует в течение 40 сек., а также, для выбранного двигателя [ , стр.370] допустима кратковременная перегрузка  в течение 10 сек. в течение 10 сек.
Момент инерции рабочего органа, приведенный к валу:
 кг× м2 кг× м2
Момент инерции ходового винта, приведенный к валу :
 кг× м2 кг× м2
4
. Предварительный выбор электродвигателя

Выбор электродвигателя производится из условий эксплуатации, требований, предъявленных к системе. В приводах подач металлорежущих станков в настоящее время наиболее перспективно применение высоко-моментных двигателей постоянного тока [ , стр.452 ]. Однако, специальные требования (ограничивающие динамику привода), малый диапазон изменения статической нагрузки (»4) и проведённый расчёт показали, что в данном приводе наиболее целесообразно применить общепромышленный двигатель, например серии 2П.
Т. к. в данном электроприводе статический момент сопротивления на валу двигателя изменяется в достаточно широких пределах, произведем выбор двигателя по эквивалентному моменту ( для двигателей серии 2ПБ): для двигателей серии 2ПБ):
Н× м.
По табл. 10.11 [ , стр. 372] и табл. 10.13 [ , стр. 390] выбираем общепромышленный двигатель 2ПБ132LГУХЛ4 со следующими параметрами:
 КВт. - номинальная мощность; КВт. - номинальная мощность;
 В. - номинальное напряжение питания; В. - номинальное напряжение питания;
 мин-1
- номинальная частота вращения; мин-1
- номинальная частота вращения;
 мин-1
- максимальная частота вращения; мин-1
- максимальная частота вращения;
 - номинальный КПД; - номинальный КПД;
 Ом.- сопротивление обмотки якоря при 15°С.; Ом.- сопротивление обмотки якоря при 15°С.;
 Ом.- сопротивление обмотки добавочных полюсов при 15°С.; Ом.- сопротивление обмотки добавочных полюсов при 15°С.;
 Ом.- сопротивление обмотки возбуждения при 15°С., соответственно при напряжении возбуждения Ом.- сопротивление обмотки возбуждения при 15°С., соответственно при напряжении возбуждения  В. Принимаю В. Принимаю  В. (это позволяет осуществлять питание якоря двигателя и его обмотки возбуждения от одного трансформатора) и В. (это позволяет осуществлять питание якоря двигателя и его обмотки возбуждения от одного трансформатора) и  Ом. Ом.
 мГн- индуктивность цепи якоря; мГн- индуктивность цепи якоря;
 кг× м2
- момент инерции. кг× м2
- момент инерции.
 кг- масса электродвигателя (исполнение IM1001) кг- масса электродвигателя (исполнение IM1001)
Двигатель четырёхполюсный, выполняется с полным числом добавочных полюсов.
Номинальная частота вращения электродвигателя:
 с-1 с-1
Номинальный момент:
 Н× м Н× м
Ток якоря можно поределить как :
 А. - номинальный ток якоря; А. - номинальный ток якоря;
Постоянную машины определим как:

Падение напряжения на щётках в общем случае достаточно сложным образом зависит от нагрузки [ ]. Но, в тоже время, при средних и больших нагрузках двигателя по току, их можно считать постоянными. Поэтому принимаем [ ] для пары щёток:
 В. В.
Суммарный момент инерции механизма:
 кг× м2 кг× м2
Выбранный двигатель выполняется со встроенный тахогенератором (датчик скорости). Применительно к данному приводу, тахогенератор может использоваться в устройствах защиты от превышения напряжения и скорости двигателя. В дополнение к этому, тахогенератор повышает свойства расширяемости и универсальности привода. Двигатель с тахогенератором отличается от своего аналога незначительным увеличением массы, продольных размеров и стоимости.
5. Разработка схемы и выбор элементов силовой цепи электропривода. Выбор защиты от аварийных режимов
Схема системы с соединение питающего трансформатора  и мостовой схемой выпрямления приведена на рис. 3. Выберем симметричный режим работы преобразователя. и мостовой схемой выпрямления приведена на рис. 3. Выберем симметричный режим работы преобразователя.
В тиристорных электроприводах постоянного тока наибольшее применение находят трехфазные трансформаторы серии ТСЗП, для которой по табл. 5.2. [ , стр. 196] :
 В; В;
 Гц. Гц.
 В; В;
Коэффициент  трехфазной мостовой схемы по табл. 5.1. [ , стр. 194] : трехфазной мостовой схемы по табл. 5.1. [ , стр. 194] :

Выпрямленное напряжение по [ , стр. 226] :
 В. В.
Расчётная мощность трансформатора [ , стр. 194] :
 кВ×А кВ×А
В связи с отсутствием маломощных трансформаторов в этой серии выбираем по табл. 5.2. [ , стр. 194] силовой трансформатор ТСЗП-10/0,7- УХЛ4 с основными параметрами:
 кВ×А - номинальный мощность; кВ×А - номинальный мощность;
 В - номинальная напряжение сетевой обмотки; В - номинальная напряжение сетевой обмотки;
Гц.- частота тока в сети;
В - линейное напряжение вторичной обмотки;
 - номинальный ток нагрузки; - номинальный ток нагрузки;
 - напряжение короткого замыкания; - напряжение короткого замыкания;
 - ток холостого хода; - ток холостого хода;
 Вт.- потери при коротком замыкании; Вт.- потери при коротком замыкании;
 Вт. - потери на холостом ходу. Вт. - потери на холостом ходу.
Полное сопротивление фазы трансформатора, приведённое ко вторичной обмотке [ , стр. 226] :
 Ом. Ом.
Активное сопротивление фазы трансформатора [ , стр. 226] :
 Ом. Ом.
Индуктивное сопротивление фазы трансформатора [ , стр. 226] :
 Ом. Ом.
Индуктивность фазы трансформатора [ , стр. 226] :
 Гн. Гн.
Имея коэффициенты  , ,  и и  по [ , стр. 194,208,209] рассчитаем критическую индуктивность силовой цепи: по [ , стр. 194,208,209] рассчитаем критическую индуктивность силовой цепи:
 Гн. Гн.
Для уменьшения пульсаций выпрямленного тока и ограничения зоны прерывистых токов, необходимо, чтобы индуктивность якорной цепи была не ниже критической. В связи с тем, что  43мГн>13,1мГн необходимости увеличивать 43мГн>13,1мГн необходимости увеличивать  , например, посредством введения реактора, нет. , например, посредством введения реактора, нет.
Выпрямительные диоды выберем с коэффициентом запаса для наиболее нагруженных участков цикла [ , стр.38] по обратному напряжению  В. и среднему прямому току В. и среднему прямому току
 - Д 246 [ ]: - Д 246 [ ]:

В.- максимальное обратное напряжение;
 - максимальный прямой выпрямленный ток; - максимальный прямой выпрямленный ток;
 Гц- рабочая частота; Гц- рабочая частота;
В качестве силовых ключей ШИР выберем IGBT-транзисторы. Выберем с коэффициентом запаса для наиболее нагруженных участков цикла по обратному напряжению  В. и среднему прямому току В. и среднему прямому току  - HGTP20N35G3VL фирмы Intersil Corp.[ ]: - HGTP20N35G3VL фирмы Intersil Corp.[ ]:
 В.- максимальное напряжение кэ; В.- максимальное напряжение кэ;
 - максимальный ток кэ при 25° С; - максимальный ток кэ при 25° С;
 - напряжение насыщения при номинальном токе; - напряжение насыщения при номинальном токе;
 мкс- максимальное время нарастания; мкс- максимальное время нарастания;
 Вт- максимальная мощность. Вт- максимальная мощность.
В качестве обратных диодов ШИР выберем КД2989Б [ ]:
 В.- максимальное обратное напряжение; В.- максимальное обратное напряжение;
 - - максимальный прямой выпрямленный ток; - - максимальный прямой выпрямленный ток;
 кГц- максимальная рабочая частота. кГц- максимальная рабочая частота.
Для фильтрации выпрямленного напряжения в схеме необходимо предусмотреть фильтр (конденсатор C). Минимально необходимую ёмкость определим по формуле [ , стр.428 ]:
 мкФ мкФ
 Ом - сопротивление нагрузки. Ом - сопротивление нагрузки.
 - коэффициент пульсаций. Принимаю - коэффициент пульсаций. Принимаю 
 рад/сек.- частота питающей сети. рад/сек.- частота питающей сети.
Кроме того, конденсатор должен обладать достаточной электрической прочностью в режимах торможения двигателя. Так как электрическая энергия в сеть не передаётся, а накапливается на конденсаторе.

где  - напряжение до которого должен заряжаться конденсатор при торможении с разницей скорости - напряжение до которого должен заряжаться конденсатор при торможении с разницей скорости  рад/сек. рад/сек.
Отсюда  В. В.
С учётом того, что для сброса энергии параллельно конденсатору включён реостат коммутируемый транзистором VT5, выбираем конденсатор К50-32 с параметрами:
 мкФ – номинальная ёмкость; мкФ – номинальная ёмкость;
 В. – номинальное напряжение. В. – номинальное напряжение.
В целях унификации в качестве ключа VT5 выбираем IGBT транзистор HGTP20N35G3VL (как и для ШИР).
Сопротивление R выберем из условия максимального тока через транзистор:
 Ом. Ом.
Питание обмотки возбуждения осуществим от вторичной обмотки выбранного трансформатора. Для выпрямления переменного напряжения, очевидно, подойдёт ещё один рассчитанный ранее выпрямитель по трёхфазной мостовой схеме. В связи с тем, что коэффициент пульсаций выпрямителя достаточно мал и индуктивность обмотки возбуждения достаточно большая (по сравнению с якорной обмоткой) дополнительных фильтров устанавливать не будем.
В данном приводе (по заданию) необходимо предусмотреть защиту от аварийных ситуаций.
В системах АЭП применяются защиты [ ]:
Основные:
1) максимально-токовая защита;
2) тепловая защита;
3) минимально-токовая защита;
специализированные:
4) защита от перенапряжения;
5) защита от превышения напряжения и скорости двигателя.
Максимально-токовую защиту (защиту от КЗ) осуществим автоматическими выключателями с максимально-токовыми расцепителями, соответственно для всей схемы (SF1- автомат АК63-3МГ на ток 50 А и напряжение 500 В.) и для двигателя (SF2 – автомат AК63-1МГ на ток 50 А. И напряжение 220 В.).
Тепловую защиту двигателя (защиту от длительной перегрузки током в повторно-кратковременном режиме ) осуществим реле максимального тока КА1 (РЭВ-570 на 40 А.).
Для защиты двигателя от снижения тока в цепи возбуждения применим минимально-токовое реле КА2( РЭВ-830 на 1,6 А.).
Для защиты двигателя от превышения напряжения на якоре применим реле напряжения KV (РН53/400 на 400 В.) в сочетании со встроенным тахогенератором.
Для защиты двигателя от перенапряжений на обмотке возбуждения (при отключении или обрыве) используем разрядные резисторы, которые включаются как можно ближе к клеммам этих обмоток.
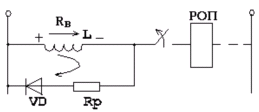
Рис. 2 Схема защиты обмотки возбуждения от перенапряжений
Разрядный резистор Rp
выбирается из условий ограничения перенапряжений на уровне Uперср
£ 1000В.
При UН
= 220В; Rp
= 4,5 RВ
=4,5×216=972 Ом.
В целях унификации ставим диод Д246.

Рис. 3 Схема силовой цепи электропривода
6. Расчёт статических характеристик электропривода
Суммарное сопротивление якорной цепи:
 Ом. Ом.
Жесткость механической характеристики:

Максимальное напряжение на двигателе:
 В. В.
Параметры рабочих режимов сведены в табл. 5
Таблица 5.Параметры рабочих режимов.
 |
 |
 |
 |
 |
 |
83,776 |
8,378 |
-83,776 |
-8,378 |
 |
800 |
80 |
-800 |
-80 |
 |
7.927 |
31.496 |
-7.927 |
-15.783 |
Необходимое напряжение питания двигателя в соответствии с формулой:

Относительная длительность включения [ , стр. 77] :

Скорость холостого хода:


Результаты расчета механических характеристик сведены в табл. 6., статические механические характеристики приведены на рис.3 и рис.4.
Таблица 6.Статические механические характеристики.
|
|
|
 |
|
|
 |
 В. В. |
206.029 |
67.316 |
 |
-202.02 |
-40.331 |
|
 |
0.968 |
0.653 |
0 |
0.041 |
0.408 |
0 |
 рад/сек рад/сек |
88.824 |
28.435 |
|
-88.824 |
-18.429 |
|
 об/мин об/мин |
848.207 |
271.537 |
|
-848.2 |
-175.98 |
|
7. Расчёт переходных процессов в электроприводе
Из условия ограничения ускорения при пуске значением в 0,4 м/с2
имеем:
 Н×м Н×м
Из условия ограничения ускорения при торможении значением в 0,4 м/с2
, имеем:
 Н×м Н×м
Электромеханическая постоянная времени:
 мс. мс.
Электромагнитная постоянная времени:
 мс. мс.
Соотношение постоянных времени:

Видно, что электропривод не имеет склонности к колебательности. Для упрощения, построим переходные процессы не учитывая электромагнитную инерцию.
Далее проведём расчёт переходных процессов по участкам.
Участок 1
– пуск до w01
=83.776 с-1
с последующим приложением момента МС
=7.927 Н×м.

Участок 2
– торможение до w02
=8.378 с-1
с набросом момента до МС
=31.496 Н×м.

Участок 3
– торможение до w3
=0 без момента сопротивления (МС
=0).

Участок 4
– пуск до w04
=-83.78 с-1
с моментом сопротивления МС
=-7.927 Н×м.
Участок 5
– торможение до w05
=-8.378 с-1
с моментом сопротивления
МС
=-15.783 Н×м.

Участок 6
– торможение до w6
=0 без момента сопротивления (МС
=0).

Для моделирования переходных процессов составлена модель в Matlab (схему см. Приложение).
Результаты расчетов и моделирования представлены на рис. 5 - 11.

  
Рис. 5. Результаты моделирования (участок 1).
 
Рис. 6. Результаты моделирования (участок 2).
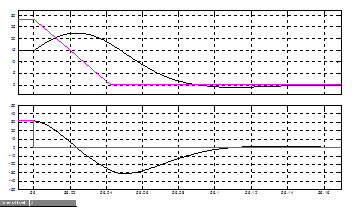
Рис. 7. Результаты моделирования (участок 3).
Для проверки ошибок по расчетным данным, увеличим значение задания
 
Рис. 8. Результаты моделирования (участок 3).
Рис. 9. Результаты моделирования (участок 4).

Рис. 10. Результаты моделирования (участок 5).

Рис. 11. Результаты моделирования (участок 6).
Для проверки ошибок по расчетным данным, увеличим значение задания

Рис. 12. Результаты моделирования (участок 6).
 
Рис. 13. Скоростная диаграмма электропривода
8. Анализ правильности выбора мощности двигателя
Проверка выбранного электродвигателя по нагреву
Анализ теплового состояния электродвигателя является важной задачей, возникающей при проектировании системы электропривода. Необходимость такого анализа объясняется тем, что любая электрическая машина может при своей работе нагреваться лишь до определенной допустимой температуры.
Допустимый нагрев двигателя определяется нагревостойкостью применяемых изоляционных материалов. Соблюдение установленных ограничений по допустимой температуре обеспечивает длительный срок службы электрической машины, а превышение допустимой температуры ведет к разрушению изоляции обмоток и к сокращению срока эксплуатации двигателя.
Проверку выбранного электродвигателя выполним методом средних потерь.
Номинальные потери мощности в двигателе :

Номинальные переменные потери мощности в двигателе:

Механические потери примем равными 10% от номинальных:

Номинальные постоянные потери мощность в двигателе:

Греющие потери в двигателе равны по [3], при пренебрежении пусковыми и тормозными потерями, вследствие относительной малости времени данных процессов:

Коэффициент ухудшения охлаждения по [3]:

Зависимость коэффициента ухудшения охлаждения от скорости вращения:

Максимально-допустимый перегрев по классу изоляции: 
Номинальная теплоотдача:

Средний перегрев двигателя во время работы:

Результаты расчётов сведёны в таблице:
Таблица 7
|
1 |
2 |
3 |
4 |
5 |
6 |
 |
40 |
5 |
5 |
20 |
5 |
15 |
 |
808.7 |
242.8 |
0 |
3154 |
192.5 |
0 |
 ДРгрср
, Вт ДРгрср
, Вт |
49 |
| Аср
, Вт/с |
0.97 |
 |
122,074 |
Время цикла: 
Средние греющие потери за цикл:

Средняя теплоотдача за цикл:

Среднеквадратичное отклонение потерь за цикл:

Среднее отклонение температуры за цикл:

Вследствие расчетов, произведенных выше, очевидно, что, температура двигателя за цикл работы колеблется в пределах трёх градусов Цельсия, и двигатель работает в пределах допустимого значения.
9. Приложение
Схема модели в Matlab для расчёта переходных процессов двигателя.

Рис. 14. Главная модель
10. Индивидуальная исследовательская часть
Исследовательской частью данного курсового проекта является адаптивное регулирование скорости двигателя по моменту инерции механизма.
Для осуществления автоматического управления объектами, параметры которых меняются и для получения хорошей динамики, используем систему адаптивного управления. Существует два типа адаптации : параметрическая адаптация и сигнальная адаптация. Наиболее простым для синтеза является способ сигнальной адаптации.

Рис.15
На рисунке 8.1 изображена система с сигнальной адаптацией, здесь
Wэ – эталонная модель электропривода.
Wр – передаточная функция регулятора.
Wop – передаточная функция объекта регулирования.
Определяем параметры, необходимые для моделирования адаптивного регулятора скорости по моменту инерции.
При моделировании используем двигатель постоянного тока 2ПБ132LГУХЛ4, используемый в данном курсовом проекте, со следующими параметрами:
- номинальная мощность:  ; ;
- номинальная скорость вращения вала:  ; ;
- номинальное напряжение питания:  ; ;
- номинальный ток якоря:  ; ;
- суммарный момент инерции:  . .
По номинальным данным двигателя рассчитаем следующие величины:
Номинальный момент:  ; ;
Постоянная двигателя:  . .
Сопротивление цепи якоря:  . .
Индуктивность цепи якоря:  . .
Угловая скорость холостого хода:  . .
Коэффициент передачи тиристорного преобразователя:

Определяем электромеханическую и механическую постоянные времени:


Определяем естественную жёсткость механической характеристики:

Коэффициент обратной связи по скорости:


Для расчета адаптивного регулятора скорости двигателя по моменту инерции двигателя произведём расчет системы адаптивного управления подчинённого регулирования без учёта момента инерции двигателя, т.е. примем  .
.
* Контур момента *:
Контур момента системы подчинённого регулирования настраиваем на технический оптимум:
Передаточная функция объекта регулирования:

Желаемая функция условно разомкнутой системы:

Передаточная функция регулятора:

где  ; ;
 ; ;
 . .
* Контур скорости *:
Контур скорости системы подчинённого регулирования настраиваем на технический оптимум:
Передаточная функция объекта регулирования:

Желаемая функция условно разомкнутой системы:
 . .
Передаточная функция регулятора:
 , ,
где  ; ;

Составляем модель на языке структурных схем в среде MаtLab:

Рис.16.Программа на языке структурных схем в среде MatLab
При моделировании использованы следующие параметры:
− Напряжение управление Uy = 6B, что соответветствует напряжению питанию Uп = 132 В.
− двигатель нагружен номинальным моментом,равным 15.52 Н·м.
− Моделирование произведем при трех значениях момента инерции: J1 = 0.03  , J2 = 0.0586 (номинальный момент инерции ), J3 =0.15 , J2 = 0.0586 (номинальный момент инерции ), J3 =0.15
Результаты моделирования в среде MatLab

 
Рис.17. Зависимость скорости эталонной модели от времени

Рис.18. Совмещенные характеристики изменения скорости, при
J1 = 0.03

Рис.19. Совмещенные характеристики изменения скорости, при
J1 = 0.0586 

Рис.20. Совмещенные характеристики изменения скорости, при
J1 = 0.15
Список литературы
1. Елисеев В. А. Справочник по автоматизированному электроприводу, Москва, Энергоатомиздат, 1983.
2. Справочник по электрическим машинам под ред. Копылова И. П., Т.1. – М.: Энергоатомиздат, 1988.
3. Перельмутер В. М. Комплектные тиристорные электроприводы. – М.: Энергоатомиздат, 1988.
4. Кордыш Л. М. и др. Исполнительные механизмы приводов подач подвижных узлов металлорежущих станков: Обзор. - М.: НИИмаш, 1980. – 56 с.
5. Левит Г. А., Лурье Б. Г. Определение потерь в элементах приводов подач станков и расчёт направляющих скольжений по характеристикам трения: Руководящие материалы. - М.: О ВиНТИ ЭНИМС, 1961. – 90 с.
6. Михайлов О. П. Автоматизированный электропривод станков и промышленных роботов: Учебник для вузов. – М.: Машиностроение, 1990. – 304 с.
7. Косматов В. И. Проектирование электроприводов металлургического производства: Учебное пособие. – Магнитогорск: МГМА, 1998. – 244 с.
8. База электронных компонентов интернет-магазина www.platan.ru
9. Вольдек А. И. Электрические машины: Учебник для Вузов. Л.:”Энергия”, 1974. – 840 с.
10. Фираго Б. И., Павлячик Л. Б. Теория электропривода: Учеб. пособие – Минск: ЗАО “Техноперспектива”, 2004. – 527 с.
11. Забродин Ю. С., Промышленная электроника: Учебник для Вузов. – М.: “Высшая школа”, 1982. – 456 с.
12. Электротехнический справочник. / Герасимов В. Г., Т. 2 М.: “Энергия”, 1980.
13. Гульков Г.И., Петренко Ю.Н., Раткевич Е.П. и др. Системы автоматизированного управления электроприводами. – М.: “Новое знание”, 2004.
14. Электрические конденсаторы и конденсаторные установки. /Кучинский Г. С. – М.: “Энергоатомиздат”, 1987.
|