|
Министерство общего и профессионального Российской Федерации
Уральский Государственный Технический Университет
по дисциплине РЭСТК
«Эскизное проектирование радиоэлектронной
системы передачи информации»
Екатеринбург 2002
Содержание
1. Задание на проектирование 3
2. Расчет параметров системы 5
2.1 Расчет параметров преобразования сообщений. 5
2.1.1 Параметры сообщения. 5
2.1.2 Выбор ошибок преобразования. 5
2.1.3 Параметры преобразованных сообщений. 7
2.2 Расчет энергетических характеристик 12
2.3 Расчет требуемой мощности излучаемого сигнала. 13
2.4 Основные параметры приемной и передающей антенн. 15
3. Сводные результаты расчета и выбора параметров функциональных устройств. 17
4. Частотный план системы 18
4.1 Канал трафика (передача информации с объекта на ЦП). 18
4.2 Канал управления 19
5. Протоколы работы системы 22
5.1 Протокол установления связи. 22
5.2 Протокол окончания сеанса 23
Библиографический список 24
Приложение.1. 25
Приложение.2. 26
Спроектировать радиоэлектронную систему передачи непрерывных сообщений с подвижного объекта по радиоканалу на пункт сбора информации. В качестве источников сообщений рассматривается совокупность процессов, характеризующих состояние параметров объекта и окружающей среды. Источники сообщений находиться на «борту» шар-зонда. Пункта сбора информации (Ц.П.) находится на земле.
Характеристики проектируемой системы
1. Характеристики аналоговых сообщений
· Нормированная плотность распределения мгновенных значении сообщения:
· Средне квадратичное отклонение:

· Вид преобразования аналогового сообщения: ДИКМ
· Спектральная плотность аналогового сообщения:
· Суммарная ошибка преобразования аналогового сообщения в цифровое:

2. Параметры радиолинии передачи информации с объекта
· Число каналов (датчиков) объекта: N=8
· Вид модуляции: АМн
· Число «м» сигналов: м=2
· Допустимое значение вероятности ошибки воспроизведения символа дискретного сообщения:   =20*10-7 =20*10-7
· Надежность связи:  =0.8 =0.8
3. Параметры радиолинии объект–ЦП
· Максимальный радиус зоны обслуживания:  = 60 км = 60 км
· Рабочая длина волны:  = 50 см = 50 см
4. Организация доступа к Ц.П.
Непрерывные сообщения, преобразованные в цифровую форму, передаются на Ц.П. пакетом длительностью 40 сек. по многоканальной коммутируемой радиолинии по запросу объекта
· Число физических радиоканалов Ц.П: Nрк
=5
· Метод свободного доступа в Р.Л. Св.: ЧРК
· Средняя интенсивность вызовов Rв
=3.5 вызова/час
· Вероятность отказа в обслуживании: pотк
.= 0,02
· Среднее время сеанса связи: nв
=4 с
5. Коррекция ошибок в радиолинии
Оценить качество приёма цифрового сигнала при использовании блочного избыточного кодирования, с числом проверочных символов не превышающим 10% от длины блока. Реализовать по выбору один из способов коррекции ошибок – исправление, обнаружение с переспросом блоков, их стиранием, изменением мощности передатчиков объектов и т.д. Отразить эту функцию в структурной схеме объекта и Ц.П. и в протоколе работы радиолинии, оценить эффективность кодирования.
2. Расчет параметров системы
2.1 Расчет параметров преобразования сообщений
2.1.1 Параметры сообщения
При кодировании непрерывных сообщений с помощью ДИКМ возникают ошибки временной дискретизации δ1
, ограничения динамического диапазона δ2
, квантования сообщения δ3
.
2.1.2 Выбор ошибок преобразования
Для расчета основных параметров требуется выбрать соотношение между ошибками преобразования.
– Ошибка временной дискретизации δ1
:
Результатом ДИКМ является цифровой сигнал, несущий информацию о величине и знаке приращения между двумя соседними отчетами сообщения или разность между истинным и предсказанным значением отсчета по ограниченному числу предыдущих значений сообщения.
Эта операция приводит к резкому уменьшению разрядности сигнала, но и к повышению частоты дискретизации, которая вычисляется по формуле:
 , (2.1)
, (2.1)
где Fв – верхняя частота спектра сообщения после ограничения, которая находится по формуле:
δ1 (2.2)
(2.2)
в итоге, задавая значения δ1
, с помощью Mathcad вычисляем значения Fd.
– Ошибка ограничения динамического диапазона δ2
:
Динамический диапазон Ymax
будет определятся заданной ошибкой ограничения динамического диапазона:
 (2.3) (2.3)
– Ошибка квантования сообщения δ3
:
Шаг квантования будет определяться заданной ошибкой квантования δ3
. (4.2.2) [1].
 , (2.4)
, (2.4)
Результатом правильного выбора ошибок преобразования, должна явится минимизация полосы частот радиолинии Dfрл
=min, что в достигается в основном, при максимальной длительности разряда цифрового сигнала tn
=max. (формула 4.2.9. [1]). Из формулы видно что это условие достигается, при неизменности прочих условий (Nc
), минимизацией Fd, Ymax
и максимизацией hк
, (это следует из выражения 4.2.4., 4.2.9. [1]), Эти условия позволяют определиться с выбором ошибок, даже не зная Nc
.
Произведем расчет Fв
, Fd, Ymax
и hk
для разных вариантов распределения ошибок используя формулы (2.1 – 2.4). Учтем, что распределение ошибок выбирается из условия:
 (2.5)
(2.5)
Наиболее оптимальным является вариант, когда:  = = /3= /3= /3= /3= /3 /3
Полученные результаты позволяют выбрать следующие значения:
δ1
=0.017
δ2
=0.017
δ3
=0.017
Fd
=1.465*103
Гц,
Fв
=160 Гц,
hk
=0.2
H=Ymax
=4.1
Xm
=13.12
Проведем расчет основных параметров:
- эквивалентная полоса частот w0э
, определяемая из уравнения:
- число уровней квантования m:
 , возьмем m=13,
, возьмем m=13,
- число разрядов двоичного кода n:
 , значит n=4,
, значит n=4,
- длительность канального сигнала Тк.
Тк определяется частотой следования отсчетов оцифрованного сигнала, для правильного восстановления сообщения на приемной стороне.

- длительность разрядного импульса τп
:
-
где:
N=8 – количество датчиков на объекте.
где Nс
- число служебных разрядов, рассчитывается по формуле

где Nадр
- число разрядов адреса объекта
Nпук
– число разрядов помеха устойчивого кода
Nдоп
– число дополнительных разрядов (преамбула, разделительные, признак канала трафика или канала управления, защитный бланк)
Разрядность адреса находится из максимально допустимой нагрузки на систему А (Эрл/ч), которая находится при заданной вероятности отказа Pотк
=0.04, из графика [1]:
 , отсюда
, отсюда

значит, система может обеспечивать работу 42 шаров-зондов.
Тогда разрядность адреса составит 6 бит.
Число проверочных разрядов выбираем из соотношения
 бит бит
В результате получим помеха устойчивый код (nk
.kk
)=(88.81), где kk
получается из
 бит бит
Минимальное кодовое расстояние этого кода d=4 получено из соотношении и


где r=Nпук
Соотношение называется граница Хеминга и является необходимым условием, а достаточным условием или границей Варшамова-Гильберта
Этот код из ходя из  (минимального кодового расстояния) может обнаруживать ошибки кратностью a=2 и исправлять ошибки кратностью b=1. (минимального кодового расстояния) может обнаруживать ошибки кратностью a=2 и исправлять ошибки кратностью b=1.
Определим вероятность не обнаружения ошибок данным кодом, которая вычисляется по формуле (8.28 [2]).

полученное значение, показывает, что при заданной РД
ошибки кратности 3 и выше возникают с очень малой вероятностью.
Определим вероятность появления ошибок, которые код обнаруживает, но не может исправить. Т.е. ошибки кратности 2 по формуле (8.27 [2]).

полученная вероятность ошибки мала.
Полученные результаты позволяют сделать вывод:
· полученный систематический код обнаруживает практически все ошибки.
· исправляет практически все из обнаруженных ошибок.
· всем этим обеспечивается высокая помехоустойчивость передачи.
Поэтому в рассматриваемой системе будет реализован следующий способ коррекции: все ошибки кратностью один исправляются, а остальные пакеты в которых есть ошибки кратностью два и больше будут стираться.
Число дополнительных разрядов возьмём Nдоп
=8 бит.
В служебные разряды должны включаться и биты синхронизации, но в данной системе применяется отдельный канал синхронизации, который будет описан позже.
В результате по формуле получим
 бит. бит.
Тогда длительность одного разряда
 мкс. мкс.
– скорость передачи цифрового сигнала, объем передаваемой информации

скорость передачи системы будет больше чем у систем передачи речи. Объем передаваемой информации невелик, значит ЗУ объекта будет дешевым.
- полоса частот группового сигнала ΔfΣ
.
- Параметры модуляции во второй ступени.
Во второй ступени модуляции используется двухпозиционная АМн. Выберем коэффициент амплитудной модуляции:
ma
= 2
- полоса частот радиолинии Δfрл
.
В разрабатываемой системе используется частотное разделение каналов, тогда:
где γ=0.7 – коэффициент, зависящий от формы импульса и способа обработки сигнала в приемнике.
Коэф.=1.1 – коэф. Учитывающий взаимной нестабильности несущей частоты излучаемого сигнала и частоты настройки приемника и доплеровского сдвига.
2.2 Расчет энергетических характеристик
Качество выделения информации приемным устройством цифровой системы передачи информации, связано с вероятностью ошибки приёма разряда сообщения. Связь между допустимым значением вероятности ошибки Рд
и пороговым отношением мощности сигнала к мощности шума h2
пор
=q2
для двухпозиционной ЧМн при некогерентном приеме может быть представлена в виде:
 ,
,
из данного выражения выделим пороговое отношение h2
пор
:

h2
пор
позволяет рассчитать необходимую мощность сигнала на входе приемника, если известна мощность его шумов. Но из – из флюктуаций сигнала в точке приема меняется во времени случайным образом. Характер изменения таков, что плотность вероятности мощности близка к плотности вероятности Релея.
Опираясь на формулы (4.3.3, 4.3.5. [1]), найдем h2
раб
.
полученное значение h2
раб
, обеспечивает заданную надежность связи.
Найдем мощность шума, приведенную к входу приемника, используя выражение (4.3.8 [1].)

где N0
– спектральная плотность шумов, приведенных к входу приемника.
Спектральная плотность шума состоит из следующих составляющих, найденных из рис. 1 [1]. для f=600 МГц:

где N01
– минимальные космические шумы.
N02
– шумы параметрических усилителей.
Другие составляющие N0
на данной частоте равны нулю.
найдем рабочее значение удельной средней мощности передатчика. (4.3.9. [1]).

где:
GA
– – коэффициент направленного действия передающей антенны, находится по формуле с учетом рис. 1:
Sэф
– эффективная площадь приемной антенны.
 ,
,
Рраб
– рабочая мощность сигнала на входе приемника.

Рпор
– пороговая мощность сигнала на входе приемника

η=0.2 – коэффициент потерь энергии сигнала в антенно-фидерных трактах приемника и передатчика и при распространении радиоволн.
a, b – ширина диаграммы направленности антенны в горизонтальной и вертикальной плоскости в градусах. (Рис. 1)
Получив значение удельной средней мощности передатчика, найдем рабочую мощность передатчика, при условии, что в антенной системе используется 75 Ом фидер.

Требуемая мощность не велика, значит, источники питания на объектах будут работать долго, сокращая эксплуатационные расходы системы.
Расчет вероятности ошибки приёма кодовой группы при независимых ошибках приёма разрядов можно провести, используя равенство (4.3.10. [1]):

Расчет относительной с.к.о. воспроизведения сообщения, вызванной действием шумовой помехи на цифровой сигнал, можно выполнить по формуле (4.3.12. [1]):

найдем эффективное значение результирующей относительной ошибки сообщения на выходе системы с учетом действия шумовой помехи;

полученное значение показывает, что наибольшие искажения при оцифровке непрерывных сообщений с помощью ДИКМ, а ошибки, возникающие при передачи сообщения незначительны.
Значит, система некритична к шумам, действующим в приемопередающем тракте.
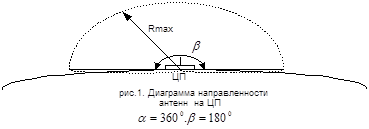
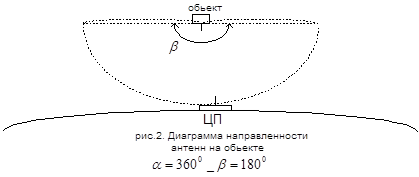
На центральном пункте и на объекте применяются приемопередающие антенны со следующими диаграммами направленности:
Определимся с параметрами антенн:
- Коэффициент направленного действия.
Ga
=2
- Коэффициент полезного действия
ηа
=0,8
Все антенны, применяемые в системе имеют одинаковые диаграммы направленности. Применение таких антенн обусловлено тем, что местоположение объекта может быть произвольным в полусфере радиусом
R=60 км.
- ошибка временной дискретизации – δ1
=0.017
- ошибка ограничения динамического диапазона δ2
=0,017
- ошибка квантования сообщения – δ3
=0,017
- пик фактор сообщения – Пх
=4,1
- частота дискретизации – Fд
=1465 Гц
- верхняя частота спектра сообщения после ограничения – Fв
=160 Гц,
- шаг квантования – hk
=0,2
-
длительность пакета данных – Тк
=1,2*10-3
- длительность импульса – τп
=120 мкс
- коэффициент Амн – ma
=2
- полоса радиолинии – Δfрл
=6,4 КГц
- рабочая частота – f=600МГц
- пороговое отношение сигнал/шум – h2
пор
=50
- рабочее отношение сигнал/шум – h2
раб
=222
- КНД антенны – Ga
=2
- Эффективная площадь антенны – Sэф
=0,04м2
- Мощность излучаемого сигнала – Рпер
=15Вт
- вероятности ошибки приёма кодовой группы – Рош
=3.8*10-6
- относительная с.к.о. воспроизведения сообщения – δ=0,031
4
. Частотный план системы
Система содержит следующие каналы, представленные на рис. 6.

Рис. 3.
Канал трафика 1 f0
=599.986 МГц.
Канал трафика 2 f0
=599.991 МГц.
Канал трафика 3 f0
=600.000 МГц.
Канал трафика 4 f0
=600.007 МГц.
Канал трафика 5 f0
=600.014 МГц.
Прямой канал управления f0
=599МГц Δf=46КГц.
Выбранное разнесение каналов по частоте обеспечивает их разделение при использовании узкополосных входных цепей у приемников и передатчиков.
4.1 Канал трафика (передача информации с объекта на ЦП)
Канал трафика используется для передачи информации с объекта на ЦП и содержит:
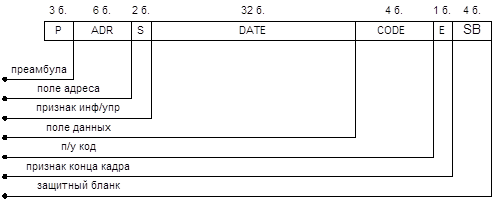
Рис. 4. Структура канала трафика
Описание полей канала трафика.
· Преамбула (поле Р) – обозначает начало кадра (пос-ть 101).
· Поле адреса (поле ADR) – адрес объекта.
· Признак инф/упр (поле S) – «10» обозначает начало информации, «11» обозначает, что дальше идёт служебная информация (зарезервированная функция)
· Поле данных (поле DATE) – информация с 8‑и датчиков.
· п/у код (поле CODE) – помеха устойчивый код.
· Признак конца кадра (поле Е) – обозначает конец кадра.
· Защитный бланк (поле SB) – служит для разделения двух кадров.
Общая длительность одного кадра 3.4 мс (42 бит) с учетом поля SB.
В разработанной системе канал управления состоит из прямого (ЦП – объект) и обратного (объект – ЦП) канала.
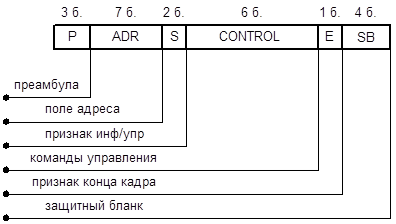
Рис. 5. структура пакета прямого канала управления при запросе на обслуживание
Описание полей канала управления.
· Преамбула (поле Р) – обозначает начало кадра (пос-ть 101).
· Поле адреса (поле ADR) – адрес объекта.
· Признак инф/упр (поле S) – «11» обозначает начало команды управления, «10» обозначает, что дальше идёт короткий информационный блок (зарезервированная функция)
· Команды управления (поле CONTROL) – кодированные команды управления.
· Признак конца кадра (поле Е) – обозначает конец кадра.
· Защитный бланк (поле SB) – служит для разделения двух кадров.
Общая длительность одного кадра 0.8 мс (23 бит) с учетом поля SB.
Описание команд управления
Число команд управления может быть 64. У каждой команды есть свой номер и этот номер кодируется в двоичном коде и передается в поле CONTROL канала управления. В таблице 1 представлены не которые из команд.
Таблица 1 Некоторые команды управления
| №
|
код
|
источник
|
получатель
|
описание
|
| 0
|
000000
|
ЦП
|
объект
|
Отказ в сеансе связи
|
| 1
|
000001
|
объект
|
ЦП
|
Запрос на выделение канала
|
| 2..17
|
0010..10001
|
ЦП
|
объект
|
Номер выделяемого канала
|
| 20
|
10100
|
объект
|
ЦП
|
Окончание сеанса связи
|
| 21..37
|
10101..100101
|
объект
|
ЦП
|
Подтв‑е объектом выделение канала.
|
| 38
|
100110
|
ЦП
|
объект
|
Досрочное освобождение канала
|
| 39
|
100111
|
объект
|
ЦП
|
Подтв‑е о досрочном осв. канала
|
| 40
|
101000
|
ЦП
|
объект
|
Запрос о начале сброса данных
|
5. Протоколы работы системы
В какой то момент времени объект хочет передать информацию на ЦП.
· Объект посылает запрос в виде своего адреса по прямому КУ (см. рис. 8.) с проверочными битами. Для повышения надежности передачи запрос повторяется 5 раз. ЦП принимает решение о запросе, если совпадают 3 из пяти принятых адресов.
· ЦП проверяет наличие свободных каналов и по обратному КУ, либо назначает канал трафика, либо отказывает в связи.
· Объект, приняв команду, содержащую номер свободного канала, по прямому каналу управления высылает подтверждение назначения номера канала.
· (если объект получил отказ в сеансе связи, то он ждет время t=40с+Δt, где Δt – произвольное число (-5< Δt<5) с. И снова посылает запрос. Если объект в течении 5с не получает разрешения либо отказа в обслуживании он повторяет запрос.
· ЦП проверяет правильность номера канала и передает подтверждение на подтверждение.
· Объект, приняв подтверждение, начинает передачу кадра с информацией с датчиков содержащего адрес объекта и посылки из 3х удлиненных бит, сигнализирующих начало передачи.
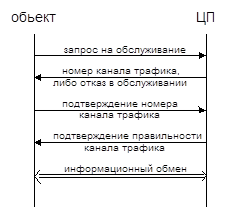
Рис. 6. протокол установления связи
5.2 Протокол окончания сеанса
Канал освобождается либо по окончании передачи информационного пакета длительностью 40 с., либо по команде с ЦП (Например при плохом качестве связи в течение длительного промежутка времени).
Библиографический список
1. Методические указания и задания к курсовой работе по РЭСТК. УПИ 2001 г. 15с
2. Пенин П.И. Системы передачи цифровой информации. М.: Сов. Радио, 1976. 368 с.
3. Радиосистемы передачи информации / под ред. И.М. Теплякова. М.: Радио и связь, 1982.264 с.
Приложение 2

|