| КОНСПЕКТ ЛЕКЦИЙ
По курсу «Автоматизация теплоэнергетических процессов»
«Автоматизация технологических процессов и объектов»
2009 год
Лекция № 1. Общие сведения о системах автоматического управления и регулирования. Основные принципы управления.
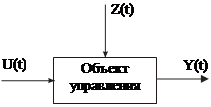
Задача управления заключается в том, чтобы объект управления (ОУ) в условиях реальной эксплуатации обеспечивал выполнение требуемых функций. Фактическое состояние объекта управления определяется одним или несколькими рабочими параметрами y(t). Чаще всего рабочие параметры представляют собой физические величины: скорость (линейная и вращения), температура, напряжение электрического тока, линейные и угловые перемещения и т.д. В реальных условиях на объект управления оказывают влияние внешние воздействия, которые называются возмущающими z(t). Эти воздействия вызывают изменение внутреннего состояния объекта и как следствие - рабочих параметров. Вектор возмущающих воздействий подразделяется на 2 составляющие: измеряемое возмущающие воздействие и не измеряемое. В связи с этим для выполнения рабочих функций по заданным алгоритмам, необходимо на объект управления организовать подачу управляющих воздействий U(t) (рис. 1).
Рис. 1.1 Объект управления.
Y(t) - характеризует состояние процесса. Данный параметр надо поддерживать постоянным во времени или измерять по определённому известному закону.
U(t) – переменные, изменением которых система регулирования может воздействовать на объект с целью управления. Обычно управляющими воздействиями служат изменения расхода материальных или энергетических потоков.
Заданный алгоритм обычно предусматривает поддержание рабочего параметра постоянным во времени или же изменение во времени по известному или неизвестному закону.
Задача управления, по существу, заключается в формировании такого закона изменения управляющего воздействия, при котором обеспечивается заданный алгоритм при наличии возмущающих воздействий.
Для решения этой задачи используются три фундаментальных принципа управления: разомкнутое управление, управление по возмущению (принцип компенсации) и замкнутое управление (принцип обратной связи или управление по отклонению).
Структурные схемы принципов управления представлены на рис.1.2.
 а) б) а) б)
в)
Рис. 1.2. Основные принципы управления
УУ - управляющее устройство; ОУ - объект управления;
И - измеритель возмущения; К - корректирующее устройство.
При разомкнутом принципе (рис.1.2, а) управляющее устройство вырабатывает сигнал управления U, который поступает на исполнительные элементы объекта управления. На вход управляющего устройства подается сигнал X, представляющий собой задание. Задание задается человеком или специальным задающим устройством. Данный принцип отличается простотой технической реализации, но оказывается малоэффективным при недостаточной информации о характере возмущения.
Для того чтобы учесть характер возмущений в процессе управления объектом, применяют управление по возмущению (рис.1.2, б). Здесь управляющее устройство, вырабатывает сигнал управления U в соответствии с заданием Х. Одновременно, производятся измерение возмущений, действующих на объект, и коррекция сигнала управления U. Полученный в результате коррекции сигнал управления U поступает на объект управления. Данный принцип является более эффективным по сравнению с разомкнутым управлением, при условии, что имеется техническая возможность измерения возмущающих воздействий. Указанное условие ограничивает применение данного принципа.
Принцип замкнутого управления (рис.1.2, в) позволяет решить задачу управления при любом характере действующих возмущений.
В этом случае сигнал задания поступает на один из входов элемента сравнения, на другой вход которого по цепи обратной связи подается измеренное с помощью датчиков фактическое значение рабочего параметра объекта управления. На выходе элемента сравнения имеем сигнал D (ошибку, отклонение), который является разностью между заданным и фактическим значениями параметров, т.е. D=Х-Y. Управляющее устройство в зависимости от величины и знака ошибки вырабатывает сигнал управления. Таким образом, принцип замкнутого управления учитывает не только задание, но и фактическое состояние объекта и действующих возмущений. Поэтому данный принцип является наиболее универсальным и позволяет успешно решать задачи управления, несмотря на неопределенность объекта управления и характера возмущений. Класс автоматических систем, построенных на основе принципа замкнутого управления, получил название систем автоматического регулирования (САР),
Примером таких систем являются системы автоведения поезда. В этих системах на борт локомотива с помощью канала связи передается заданная скорость Vз применительно к конкретному участку. Эта скорость вычисляется специальным устройством и зависит от расстояния до впередиидущего поезда, от состояния верхнего строения пути, типа локомотива, веса состава, профиля участка и т.д. На борту локомотива производится измерение фактической скорости Vj и сравнение с заданной. Если Vз>Vj то происходит включение тяговых двигателей, в противном случае включаются тормозные средства.
Свойство универсальности САР позволяет предположить, что структура замкнутого управления в неявном виде широко представлена в технике и природе.
Лекция №2. Законы регулирования
В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т.е. U=f(D). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора и основные качественные и количественные характеристики систем.
Различают линейные и нелинейные законы регулирования. Кроме того, законы регулирования могут быть реализованы в непрерывном виде или в цифровом. Цифровые законы регулирования реализуются путем построения регуляторов с помощью средств вычислительной техники (микро ЭВМ или микропроцессорных систем).
Рассмотрим основные линейные законы регулирования. Простейшим является пропорциональный закон, и регулятор в этом случае называют П-регулятором. При этом U=U0+kD, где U0-постоянная величина, k-коэффициент пропорциональности. Основным достоинством П-регулятора является простота. По существу, это есть усилитель постоянного тока с коэффициентом усиления k. Недостатки П-регулятора заключаются в невысокой точности регулирования, особенно для объектов с плохими динамическими свойствами.
Интегральный закон регулирования и соответствующий И-регулятор реализует следующую зависимость:
 , ,
где Постоянная времени интегрирования.
Техническая реализация И-регулятора представляет собой усилитель постоянного тока с емкостной отрицательной обратной связью. И - регуляторы обеспечивают высокую точность в установившемся режиме. Вместе с тем И-регулятор вызывает уменьшение устойчивости переходного процесса и системы в целом.
Пропорционально-интегральный закон регулирования позволяет объединить положительные свойства пропорционального и интегрального законов регулирования.
В этом случае ПИ-регулятор реализует зависимость:
Мощным средством улучшения поведения САР в переходном режиме является введение в закон регулирования производной от ошибки. Часто эта производная вводится в пропорциональный закон регулирования. В этом случае имеем пропорционально-дифференциальный закон регулирования, регулятор является ПД- регулятором, который реализует зависимость:

Кроме ПИ и ПД регуляторов, часто на практике используют ПИД-регуляторы, которые реализуют пропорционально-интегрально-дифференциальный закон регулирования:
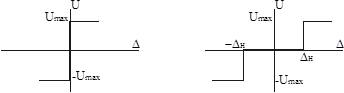
Среди нелинейных законов регулирования наиболее распространены релейные законы. Существуют двухпозиционный и трехпозиционный законы регулирования. Аналитически двухпозиционный закон регулирования записывается следующим образом:

Трехпозиционный закон регулирования имеет следующий вид:
На рис.1.5 представлены в графическом виде релейные законы регулирования.
При трехпозиционном законе регулирования величина DН определяет зону нечувствительности регулятора.
Применение релейных законов позволяет при высоком быстродействии получить такие результаты, которые невозможно осуществить с помощью линейных законов.
Рис. 1.5. Релейные законы регулирования. Лекция №3. Комбинированные АСР
Комбинированные системы регулирования применяют при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
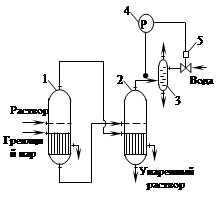
На рис. 1.7 приведен фрагмент функциональной схемы автоматизации выпарной установки, в которой одним из наиболее сильных возмущении является расход питания. Основная задача регулирования — стабилизация концентрата упаренного раствора за счет изменения расхода греющего паpa — выполняется регулятором 1, Кроме сигнала регулятора, на клапан, регулирующий подачу пара, через динамический компенсатор 2 поступает корректирующий импульс по расходу питания.

Рис. 1.7. Пример комбинированной системы регулирования концентрации упаренного раствора:
1- регулятор состава; 2 – динамический компенсатор.
На рис. 1.8 приведен пример комбинированной АСР состава дистиллята в ректификационной колонне. Стабилизация состава дистиллята обеспечивается регулятором 5 путём изменения подачи флегмы на орошение колонны. Для повышения качества регулирования в системе предусмотрена автоматическая коррекция задания регулятору 5 в зависимости от одного из основных возмущений в процессе расхода разделяемой смеси. Корректирующий импульс на задание регулятору поступает через динамический компенсатор 6.
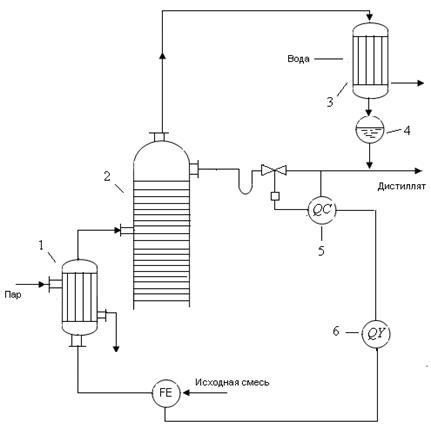
Рис. 1.8. Пример комбинированной системы регулирования состава дистиллята: 1- подогреватель исходной смеси; 2 – ректификационная колонна; 3 – дефлегматор; 4 – флегмовая ёмкость; 5 – регулятор состава; 6 – динамическиё компенсатор.
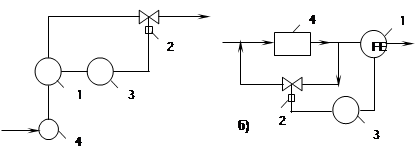
Рассмотренные примеры иллюстрируют два способа построения комбинированных АСР. Как видно из структурных схем (рис. 1.9 и 1.10), обе системы регулирования обладают общими особенностями: наличием двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования – замкнутого (через регулятор 1) и разомкнутого (через компенсатор 2). Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на выход регулятора.
Введение корректирующего импульса по наиболее сильному возмущению позволяет существенно снизить динамическую ошибку регулирования при условии правильного выбора и расчёта динамического устройства, формирующего закон изменения этого воздействия.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях.
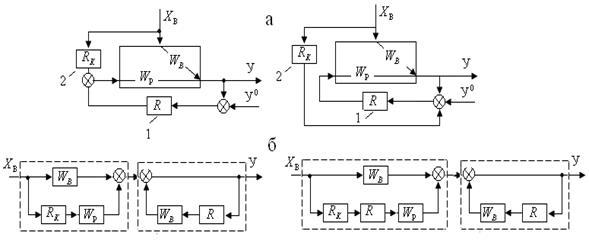
Рис 1.9. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход объекта: а – исходная схема; б – преобразованная схема; 1 – регулятор; 2 – компенсатор.
Рис 1.10. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход регулятора: а – исходная схема; б – преобразованная схема; 1 – регулятор; 2 – компенсатор.
Для выполнения принципа инвариантности необходимы два условия: Идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания. Очевидно, что достижение абсолютной инвариантности в реальных системах регулирования практически невозможно. Обычно ограничиваются частичной инвариантностью по отношению к наиболее опасным возмущениям. Рассмотрим условие инвариантности разомкнутой и комбинированной систем регулирования по отношению к одному возмущающему воздействию.
Условия физической реализуемости инвариантных АСР
Одной из основных проблем, возникающих при построении инвариантных систем регулирования, является их физическая реализуемость, т. е. реализуемость компенсатора, отвечающего условиям (1.20) или (1.20а).
В отличие от обычных промышленных регуляторов, структура которых задана и требуется лишь рассчитать их настройки, структура динамического компенсатора полностью определяется соотношением динамических характеристик объекта по каналам возмущения и регулирования и может оказаться очень сложной, а при неблагоприятном соотношении этих характеристик — физически нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в следующих двух случаях.
1. Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения. В этом случае идеальный компенсатор должен содержать звено упреждения, так как если
 и и  , ,
то с учётом (1.10)
 . .
При  . .
2. Если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья. Такой результат получается при определённом соотношении порядков дифференциальных уравнений, описывающих каналы возмущений и регулирования. Пусть
 , ,
где  - полиномы степеней - полиномы степеней 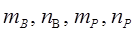 соответственно. соответственно.
Тогда

и  . .
Таким образом, условие физической реализуемости инвариантной АСР заключается в том, чтобы выполнялись соотношения
 . (1.21) . (1.21)

Рис.1.12 Принципиальная схема химического реактора с перемешивающим устройством:
1 - измеритель температуры; 2 – регулирующий клапан; 3 – измеритель расхода.
Лекция №4. Каскадные АСР
Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в систему регулирования (рис.1.19) включают два регулятора — основной (внешний) регулятор, служащий для стабилизации основного выхода объекта y, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты y. Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.

Рис.1.19. Структурная схема каскадной АСР.
Выбор законов регулирования определяется, назначением регуляторов:
для поддержания основной выходной координаты на заданном значении без статической ошибки закон регулирования основного регулятора должен включать интегральную составляющую;
от вспомогательного регулятора требуется, прежде всего, быстродействие, поэтому он может иметь любой закон регулирования (в частности пропорциональный как наиболее простой и достаточно быстродействующий).
Сравнение одноконтурных и каскадных АСР показывает, что вследствие более высокого быстродействия внутреннего контура и каскадной АСР повышается качество переходного процесса, особенно при компенсации возмущений, поступающих по каналу регулирования (при этом инерционность эквивалентного объекта благодаря внутреннему контуру снижается по сравнению с инерционностью основного канала регулирования).
Если по условию ведения процесса на вспомогательную переменную накладывается ограничение (например, температура не должна превышать предельно допустимого значения или соотношение расходов должно лежать в определенных пределах), то на выходной сигнал основного регулятора, который является заданием для вспомогательного регулятора, также накладывается ограничение. Для этого между регуляторами устанавливается устройство с характеристиками усилительного звена с насыщением.
Примеры каскадных АСР технологических объектов. На рис. 1.20 приведен пример каскадной системы стабилизации температуры жидкости на выходе из теплообменника, и которой вспомогательным контуром является АСР расхода греющего пара. При возмущении по давлению пара регулятор1 изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданный расход. При нарушении теплового баланса в аппарате (вызванном, например, изменением входной температуры или расхода жидкости, энтальпии пара, потерь тепла в окружающую среду), приводящем к отклонению выходной температуры от заданного значения, регулятор температуры 2 корректирует задание регулятору расхода 1.

Рис.1.20. Каскадная система регулирования температуры (2) с коррекцией задания регулятору расхода пара (1).
В химико-технологических процессах часто основная и вспомогательная координаты имеют одинаковую физическую природу и характеризуют значения одного и того же технологического параметра в разных точках системы (рис. 1.21).
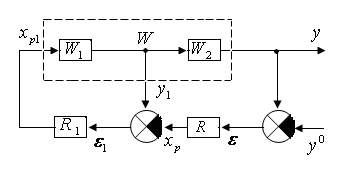
Рис.1.21 Структурная схема каскадной АСР с измерением вспомогательной координаты в промежуточной точке.
На рис. 1.22 показаны фрагмент технологической схемы, включающий подогреватель реакционной смеси и реактор, и система стабилизации температуры в реакторе. Регулирующее воздействие - расход пара - подается на вход теплообменника. Канал регулирования, включающий два аппарата и трубопроводы, является сложной динамической системой с большой инерционностью. На объект действует ряд возмущений, поступающих в разные точки системы, - давление и энтальпия пара, температура и расход реакционной смеси, потери тепла в реакторе и т. п. Для повышения быстродействия системы регулирования применяют каскадную АСР, в которой основной регулируемой переменной является температура в реакторе, а в качестве вспомогательной выбрана температура смеси между теплообменником и реактором.
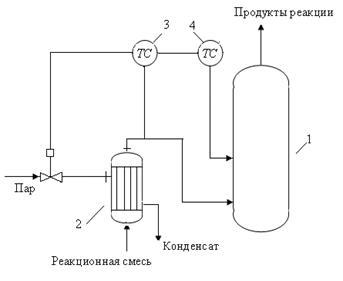
Рис.1.22. Каскадная система регулирования температуры (4) в реакторе (1) с коррекцией задания регулятору температуры (3) на выходе теплообменника (2).
Расчет каскадных АСР. Расчет каскадной АСР предполагает определение настроек основного и вспомогательного регуляторов при заданных динамических характеристик объекта по основному и вспомогательному каналам. Поскольку настройки основного и вспомогательного регуляторов взаимозависимы, расчет их проводят методом итераций.

Рис.1.23. Структурные схемы эквивалентной одноконтурной системы регулирования с основным (1) и вспомогательным (б) регуляторами: вверху – эквивалентная одноконтурная схема; внизу – преобразование каскадной АСР к одноконтурной.
На каждом шаге итерации рассчитывают приведенную одноконтурную АСР, в которой один из регуляторов условно относится к эквивалентному объекту. Как видно из структурных схем на рис. 1.23, эквивалентный объект для основного регулятора 1 (рис. 1.23 а) представляет собой последовательное соединение замкнутого вспомогательного контура и основного канала регулирования; передаточная функция его равна:
 (1.31) (1.31)
Эквивалентный объект для вспомогательного регулятора 2 (рис. 1.23.б) является параллельным соединением вспомогательного канала и основной замкнутой системы. Его передаточная функция имеет вид:
 (1.32) (1.32)
В зависимости от первого шага итерации различают два метода расчёта каскадных АСР.
1-метод. Расчёт начинают с основного регулятора. Метод используют в тех случаях, когда инерционность вспомогательного канала намного меньше, чем основного.
На первом шаге принимают допущение о том, что рабочая частота основного контура (ωр) намного меньше, чем вспомогательного (ωр4), и при ω=ωр
 . (1.33) . (1.33)
Тогда
  (1.34) (1.34)
Таким образом, в первом приближении настройки S0 основного регулятора 1 не зависят от R1(р) и находятся по WЭ0(р).
На втором шаге рассчитывают настройки вспомогательного регулятора  для эквивалентного объекта (1.32) с передаточной функцией WВ1(р), в которую подставляют R(р,S0). для эквивалентного объекта (1.32) с передаточной функцией WВ1(р), в которую подставляют R(р,S0).
2–й метод. Расчёт начинают со вспомогательного регулятора. На первом шаге предполагают, что внешний регулятор отключён, т.е.

Таким образом, в первом приближении настройки вспомогательного регулятора  находят по одноконтурной АСР вспомогательного канала регулирования. На втором шаге рассчитывают настройки основного регулятора по передаточной функции эквивалентного объекта находят по одноконтурной АСР вспомогательного канала регулирования. На втором шаге рассчитывают настройки основного регулятора по передаточной функции эквивалентного объекта  с учётом с учётом  . Для уточнения настроек вспомогательного регулятора . Для уточнения настроек вспомогательного регулятора  расчёт проводят по передаточной функции (1.32) расчёт проводят по передаточной функции (1.32)  , в которую подставляют , в которую подставляют  . Расчёты проводят до тех пор, пока настройки вспомогательного регулятора, найденные в двух последовательных итерациях, не совпадут с заданной точностью (рис. 1.24,б). . Расчёты проводят до тех пор, пока настройки вспомогательного регулятора, найденные в двух последовательных итерациях, не совпадут с заданной точностью (рис. 1.24,б).
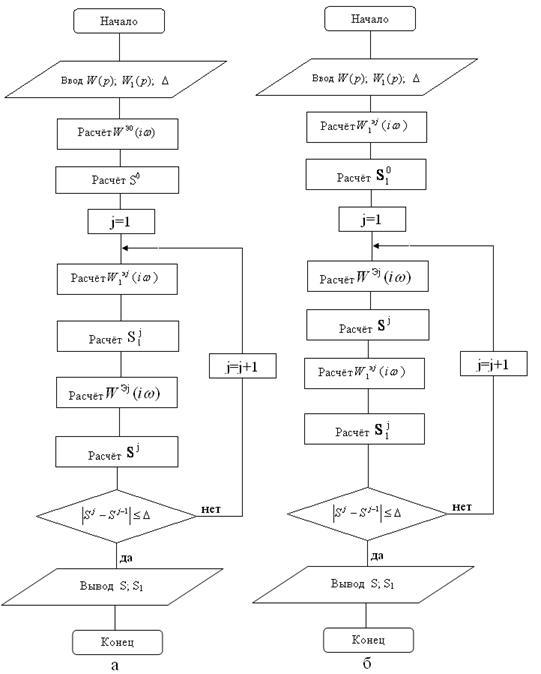
Рис. 1.24. Блок-схемы алгоритмов расчёта каскадных АСР:
а – при выполнении высокого быстродействия внутреннего контура по сравнению с внешним; б – при условии отключения внешнего регулятора в начальном приближении.
Лекция №5. Регулирование расхода
К основным технологическим параметрам, подлежащим контролю и регулированию в химико-технологических процессах, относят расход, уровень, давление, температуру, значение рН и показатели качества (концентрацию, плотность, вязкость и др.)
Необходимость регулирования расхода возникает при автоматизации практически любого непрерывного процесса. АСР расхода, предназначенные для стабилизации возмущений по материальным потокам, являются неотъемлемой частью разомкнутых систем автоматизации технологических процессов. На рис.3.4 дана принципиальная схема объекта при регулировании расхода. Обычно таким объектом является участок трубопровода между точкой измерения расхода (например, местом установки сужающего устройства 1) и регулирующим органом 2. Длина этого участка определяется правилами установки сужающих устройств и регулирующих органов и составляет обычно несколько метров. Динамика канала “расход вещества через клапан – расход вещества через расходомер” приближенно описывается апериодическим звеном первого порядка с чистым запаздыванием. Время чистого запаздывания обычно составляет доли секунд для газа и несколько секунд – для жидкости; значение постоянной времени – несколько секунд.
Ввиду малой инерционности объекта регулирования особые требования предъявляются к выбору средств автоматизации и методов расчёта АСР. В частности, в промышленных установках инерционность цепей контроля и регулирования расхода становится соизмеримой с инерционностью объекта, и ее следует учитывать при расчете систем регулирования.

Рис. 3.4. Принципиальная схема объекта при регулировании расхода: 1-измеритель расхода; 2-регулирующий клапан.
Выбор законов регулирования диктуется обычным требуемым качеством переходных процессов. Для регулирования расхода без статической погрешности в одноконтурных АСР применяют ПИ-регуляторы. Если АСР расхода является внутренним контуром в каскадной системе регулирования, регулирование расхода может осуществляться П-законом регулирования. При наличии высокочастотных помех в сигнале расхода применение регуляторов с дифференциальными составляющими в законе регулирования без предварительного сглаживания сигнала может привести к неустойчивой работе системы. Поэтому в промышленных АСР расхода применение ПД- или ПИД-регуляторов не рекомендуется.
В системах регулирования расхода применяют один из трех способов изменения расхода:
дросселирование потока вещества через регулирующий орган, устанавливаемый на трубопроводе (клапан, шибер, заслонка);
изменение напора в трубопроводе с помощью регулируемого источника энергии (например, изменением числа оборотов двигателя насоса или угла поворота лопастей вентилятора);
байпасирование, т.е. переброс избытка вещества из основного трубопровода в обводную линию.
Регулирование расхода после центробежного насоса осуществляется регулирующим клапаном, устанавливаемым на нагнетательном трубопроводе (рис. 3.5,а). Если для перекачивания жидкости используют поршневой насос, применение подобной АСР недопустимо, так как при работе регулятора клапан может закрыться полностью, что приведет к разрыву трубопровода (или к помпажу, если клапан установлен на оси насоса). В этом случае для
регулирования расхода используют байпасирование потока (рис. 3.5,б). Рис. 3.5. Схемы регулирования расхода послецентробежного (а) и поршневого (б) насосов: 1-измеритель расхода; 2-регулирующий клапан; 3- регулятор; 4-насос.
Регулирование расхода сыпучих веществ осуществляется изменением степени открытия регулирующей заслонки на выходе из бункера (рис. 3.6,а) или изменением скорости движения ленты транспортера (рис. 3.6,б).
Измерителем расхода при этом может служить взвешивающее устройство, которое определяет массу материала на ленте транспортера. Рис. 3.6. Схемы регулирования расхода сыпучих веществ:
а - изменением степени открытия регулирующей заслонки;
б–изменением скорости движения транспортера; 1– бункер;
2 - транспортер; 3 – регулятор; 4 – регулирующая заслонка;
5 – электродвигатель
Регулирование соотношения расходов двух веществ можно осуществлять по одной из трех схем, описанных ниже.
1. При незаданной общей производительности расход одного вещества (рис.3.7,а) G1, называемый “ведущим”, может меняться произвольно; второе вещество подается при постоянном соотношении g с первым, так что “ведомый” расход равен gG1. Иногда вместо регулятора соотношения используют реле соотношения и обычный регулятор для одной переменной (рис.3.7,б). Выходной сигнал реле 6, устанавливающего заданный коэффициент соотношения g, подается в виде задания регулятору 5, обеспечивающему поддержание “ведомого ”расхода.
2. При заданном “ведущем” расходе кроме АСР соотношения применяют и АСР “ведущего” расхода (рис. 3.7,в). При такой схеме в случае изменения задания по расходу G1 автоматически изменится и расход G2 (в заданном соотношении с G1).
3. АСР соотношения расходов является внутренним контуром в каскадной системе регулирования третьего технологического параметра g (например, температуры в аппарате). При этом заданный коэффициент соотношения устанавливается внешним регулятором в зависимости от этого параметра, так что G2 = g(y) G1 (рис. 3.7,г).

Рис. 3.7 Схемы регулирования соотношения расходов:
а, б – при незаданной общей нагрузке; в – при заданной общей нагрузке; г – при заданной общей нагрузке и коррекции коэффициента соотношения по третьему параметру; 1,2 – измерители расхода;3- регулятор соотношения; 4,7 – регулирующие клапаны;
5 – регулятор расхода; 6 – реле соотношения; 8 – регулятор температуры; 9 – устройство ограничения
Лекция №6. Регулирование уровня
Уровень является косвенным показателем гидродинамического равновесия в аппарате. Постоянство уровня свидетельствует о соблюдении материального баланса, когда приток жидкости равен стоку, и скорость изменения уровня равна нулю. Следует отметить, что “приток” и “сток” здесь являются обобщенными понятиями. В простейшем случае, когда в аппарате не происходят фазовые превращения (сборники, промежуточные ёмкости, жидкофазные реакторы), приток равен расходу жидкости, подаваемой в аппарат, а сток – расходу жидкости, отводимой из аппарата. В более сложных процессах, сопровождающихся изменением фазового состояния веществ, уровень является характеристикой не только гидравлических, но и тепловых и массообменных процессов, а приток и сток учитывают фазовые превращения веществ. Такие процессы протекают в испарителях, конденсаторах, выпарных установках, ректификационных колоннах и т.п.
В общем случае изменение уровня описывается уравнением вида
 , (3.11) , (3.11)
где S – площадь горизонтального (свободного) сечения аппарата; GВХ, GВЫХ - раcходы жидкости на входе в аппарат и выходе из него; GОБ - количество жидкости, образующейся (или расходуемой) в аппарате в единицу времени.
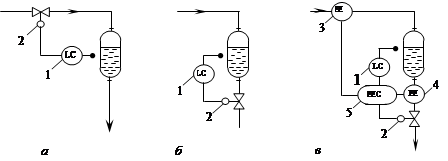
В зависимости от требуемой точности поддержания уровня применяют один из следующих двух способов регулирования:
1) позиционное регулирование, при котором уровень в аппарате поддерживается в заданных, достаточно широких пределах: LН LLВ. Такие системы регулирования устанавливают на сборниках жидкости или промежуточных емкостях (рис. 3.8). При достижении предельного значения уровня происходит автоматическое переключение потока на запасную ёмкость. LLВ. Такие системы регулирования устанавливают на сборниках жидкости или промежуточных емкостях (рис. 3.8). При достижении предельного значения уровня происходит автоматическое переключение потока на запасную ёмкость.
Рис. 3.8. Пример схемы позиционного регулирования уровня: 1-насос; 2- аппарат; 3- сигнализатор уровня;
4 – регулятор уровня; 5, 6 - регулирующие клапаны
2) непрерывное регулирование, при котором обеспечивается стабилизация уровня на заданном значении, т.е. L = L0.
При отсутствии фазовых превращений в аппарате уровень в нём регулируют одним из трёх способов:
изменением расхода жидкости на входе в аппарат (регулирование “на притоке”, рис. 3.9, а);
изменением расхода жидкости на выходе из аппарата (регулирование “на стоке”, рис. 3.9,б);
регулирование соотношения расходов жидкости на входе в аппарат и выходе из него с коррекцией по уровню (каскадная АСР, рис.3.9, в); Рис. 3.9. Схемы непрерывного регулирования уровня:
а - регулирование “на притоке”; б – регулирование “на стоке”;в – каскадная АСР; 1 – регулятор уровня; 2 – регулирующий клапан; 3,4 – измерители расхода; 5 – регулятор соотношения.
Отключение корректирующего контура может привести к накоплению ошибки при регулировании уровня, так как вследствие неизбежных погрешностей в настройке регулятора соотношения расхода жидкости на входе и выходе аппарата не будут точно равны друг другу и вследствие интегрирующих свойств объекта уровень в аппарате будет непрерывно нарастать (или убывать).
В случае, когда гидродинамические процессы в аппарате сопровождаются фазовыми превращениями, можно регулировать уровень изменением подачи теплоносителя (или хладоагента), как это показано на рис. 3.10. В таких аппаратах уровень взаимосвязан с другими параметрами (например, давлением), поэтому выбор способа регулирования уровня в каждом конкретном случае должен выполняться с учётом остальных контуров регулирования.
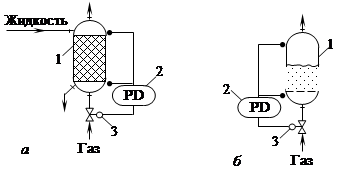
Особое место в системах регулирования уровня занимают АСР уровня в аппаратах с кипящим (псевдожиженным) слоем зернистого материала. Устойчивое поддержание уровня кипящего слоя возможно в достаточно узких пределах соотношения расхода газа и массы слоя. При значительных колебаниях расхода газа (или расхода зернистого материала) наступает режим уноса слоя или его оседания. Поэтому к точности регулирования уровня кипящего слоя предъявляют особенно высокие требования. В качестве регулирующих воздействий используют расход зернистого материала на входе или выходе аппарата (рис. 3.11, а) или расход газа на ожижение слоя (рис. 3.11, б).
Рис. 3.10. Схема регулирования уровня в испарителе:
1 – испаритель; 2- регулятор уровня; 3 – регулирующий клапан. Рис. 3.11. Регулирование уровня кипящего слоя:
а – отводом зернистого материала; б – изменением расхода газа;
1- аппарат с кипящем слоем; 2 – регулятор уровня;
3 – регулирующий орган
Лекция №7. Регулирование давления
Давление является показателем соотношения расходов газовой фазы на входе в аппарат и выходе из него. Постоянство давления свидетельствует о соблюдении материального баланса по газовой фазе. Обычно давление (или разрежение) в технологической установке стабилизируют в каком-либо одном аппарате, а по всей системе оно устанавливается в соответствии с гидравлическим сопротивлением линии и аппаратов. Например, в многокорпусной выпарной установке (рис. 3.12) стабилизируют разрежение в последнем выпарном аппарате. В остальных аппаратах при отсутствии возмущений устанавливается разрежение, которое определяется из условий материального и теплового балансов с учётом гидравлического сопротивления технологической линии.
В тех случаях, когда давление существенно влияет на кинетику процесса, предусматривается система стабилизации давления в отдельных аппаратах. Примером может служить процесс ректификации, для которого кривая фазового равновесия существенно зависит от давления. Кроме того, при регулировании процесса бинарной ректификации часто в качестве косвенного показателя состава смеси используют её температуру кипения, которая однозначно связана с составом лишь при постоянном давлении. Поэтому в продуктовых ректификационных колоннах обычно предусматривают специальные системы стабилизации давления (рис. 3.13).
Рис. 3.12. Регулирование разрежения в многокорпусной выпарной установке: 1,2 – выпарные аппараты; 3 – барометрический конденсатор; 4 – регулятор разрежения; 5 – регулирующий клапан.

Рис. 3.13. АСР давления в ректификационной колонне:
1 – колонна; 2 – дефлегматор; 3 – флегмовая ёмкость;
4 – регулятор давления; 5 – регулирующий клапан.
Уравнение материального баланса аппарата по газовой фазе записывается в виде:
 , (3.12) , (3.12)
где V- объём аппарата; GВХ и GВЫХ – расход газа, соответственно подаваемого в аппарат и отводимого из него; GОБ – масса газа, образующегося (или расходуемого) в аппарате в единицу времени.
Как видно из сравнения уравнений (3.11) и (3.12), способы регулирования давления аналогичны способам регулирования уровня. В рассмотренных выше примерах АСР давления регулирующими воздействиями выбраны расход несконденсировавшихся газов, отводимых из верхней части колонны (т.е. GВЫХ, рис. 3.13) и расход охлаждающей воды в барометрический конденсатор, который влияет на скорость конденсации вторичного пара (т.е. на GОБ, рис. 3.12).
Особое место среди АСР давления занимают системы регулирования перепада давления в аппарате, характеризующего гидродинамический режим, который существенно влияет на протекание процесса. Примерами таких аппаратов могут служить насадочные колонны (рис. 3.14,а), аппараты с кипящим слоем (рис. 3.14,б) и др.
Рис. 3.14. Схема регулирования перепада давления: а – в колонном аппарате с насадкой; б – в аппарате с кипщим
слоем; 1 – аппарат; 2 – регулятор перепада давления;
3 – регулирующий клапан.
Лекция № 8. Регулирование рН
Системы регулирования рН можно подразделить на два типа в зависимости от требуемой точности регулирования. Если скорость изменения рН невелика, а допустимые пределы её колебаний достаточно широки, применяют позиционные системы регулирования, поддерживающие рН в заданных пределах: рННрНрНВ. Ко второму типу относятся системы, обеспечивающие регулирование процессов, в которых требуется точное поддержание рН на заданном значении (например, в процессах нейтрализации). Для их регулирования используют непрерывные ПИ-или ПИД-регуляторы.
Общей особенностью объектов при регулировании рН является нелинейность их статических характеристик, связанная с нелинейной зависимостью рН от расходов реагентов. На рис. 3.15 показана кривая титрования, характеризующая зависимость рН от расхода кислоты G1. Для различных заданных значений рН на этой кривой можно выделить три характерных участка: первый (средний), относящийся к почти нейтральным средам, близок к линейному и характеризуется очень большим коэффициентом усиления; второй и третий участки, относящиеся к сильно щелочным или кислым средам, обладают наибольшей кривизной.
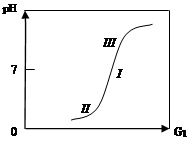
Рис. 3.15. Зависимость величины рН от расхода реагента
На первом участке объект по своей статической характеристике приближается к релейному элементу. Практически это означает, что при расчёте линейной АСР коэффициент усиления регулятора настолько мал, что выходит за пределы рабочих настроек промышленных регуляторов. Так как собственно реакция нейтрализации проходит практически мгновенно, динамические характеристики аппаратов определяются процессом смешения и в аппаратах с перемешивающими устройствами достаточно точно описываются дифференциальными уравнениями первого порядка с запаздыванием. При этом, чем меньше постоянная времени аппарата, тем сложнее обеспечить устойчивое регулирование процесса, так как начинают сказываться инерционность приборов и регулятора, и запаздывание в импульсных линиях.
Для обеспечения устойчивого регулирования рН применяют специальные системы. На рис. 3.16, а показан пример системы регулирования рН с двумя регулирующими клапанами. Клапан 1, обладающий большим условным диаметром, служит для грубого регулирования расхода и настроен на максимальный диапазон изменения выходного сигнала регулятора [хРН, хРВ] (рис.2.16,б, кривая 1). Клапан 2, служащий для точного регулирования, рассчитан на меньшую пропускную способность и настроен таким образом, что при хр=хр0+Δ он полностью открыт, а при хр=хр0-Δ - полностью закрыт (кривая 2). Таким образом, при незначительном отклонении рН от рН0, когда хр0-Δ£хр£хр0+Δ, степень открытия клапана 1 практически не изменяется, и регулирование ведётся клапаном 2. Если |хр-хр0|>Δ , клапан 2 остаётся в крайнем положении, и регулирование осуществляется клапаном 1.
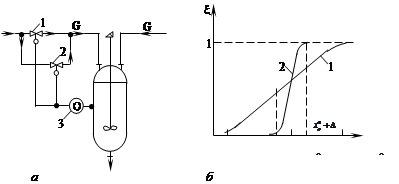
Рис. 3.16. Пример системы регулирования рН:
а – функциональная схема; б – статические характеристики клапанов; 1,2 – регулирующий клапан; 3 – регулятор рН.
Лекция № 9. Регулирование параметров состава и качества
В процессах химической технологии большую роль играет точное поддержание качественных параметров продуктов (состава газовой смеси, концентрации того или иного вещества в потоке и т.п.). Эти параметры характеризуются сложностью измерения. В ряде случаев для измерения состава используют хроматографический метод. При этом результат измерения бывает известен в дискретные моменты времени, отстоящие друг от друга на продолжительность цикла работы хроматографа. Аналогичная ситуация возникает и тогда, когда единственным способом измерения качества продукции является в той или иной степени механизированный анализ проб.
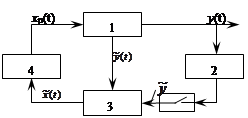
Дискретность измерения может привести к значительным дополнительным запаздываниям и снижению динамической точности регулирования. Чтобы уменьшить нежелательное влияние задержки измерения, используют модель связи качества продукта с переменными, которые измеряют непрерывно. Эта модель может быть достаточно простой; коэффициенты модели уточняют, сравнивая рассчитанное по ней и найденное в результате очередного анализа значение качественного параметра. Таким образом, одним из рациональных способов регулирования качества является регулирование по косвенному вычисляемому показателю с уточнением алгоритма его расчёта по данным прямых анализов. В промежутках между измерениями показатель качества продукта может быть рассчитан экстраполяцией ранее измеренных значений. Блок-схема системы регулирования параметра качества продукта показана на рис. 3.17.
Рис. 3.17. Блок-схема АСР параметра качества продукта:
1 – объект; 2- анализатор качества;
3 – вычислительное устройство; 4 – регулятор.
Вычислительное устройство в общем случае непрерывно рассчитывает оценку показателя качества  по формуле по формуле
 (3.13) (3.13)
в которой первое слагаемое отражает зависимость  от непрерывно измеряемых переменных процесса или величин, динамически с ними связанных, например производных, а второе – от выхода экстраполирующего фильтра. от непрерывно измеряемых переменных процесса или величин, динамически с ними связанных, например производных, а второе – от выхода экстраполирующего фильтра.
Для повышения точности регулирования состава и качества применяют приборы с устройством автоматической калибровки. В этом случае система управления производит периодическую калибровку анализаторов состава, корректируя их характеристики.
Лекция № 10. Регулирование тепловых процессов
Передача тепловой энергии является неотъемлемой частью большинства химико-технологических процессов. Для создания необходимого температурного режима в химических аппаратах используют передачу энергии в результате смешения двух и более веществ с разными теплосодержаниями.
Во многих задачах регулирования состава или температуры в резервуаре с мешалкой при определении передаточных функций принимают перемешивание идеальным. Тогда объект описывается дифференциальным уравнением первого порядка с постоянной времени, равной времени пребывания в резервуаре. Однако на практике отмечается запаздывание, по истечении которого изменение концентрации или температуры питания происходит на выходе из резервуара. Это запаздывание (называемое запаздыванием смешения) зависит от размеров резервуара, вязкости жидкости, конструкции и скорости вращения мешалки, определяющих интенсивность перемешивания.
Рассмотрим для примера аппарат непрерывного типа, в котором смешиваются два потока с расходами G1 и G2, температурами q1 и q2 и удельными теплоёмкостями сР1 и сР2 (рис. 2.19,а).
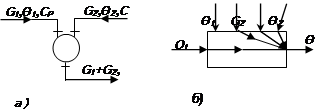
Рис.3.19. Принципиальная (а) и структурная (б) схемы теплообменника смешения.
Пусть задача регулирования состоит в поддержании заданного значения q0 температуры выходного потока путём изменения расхода G1 при условии, что основными источниками возмущений являются расход и температура второго потока G2 и q2, а температура q1 и удельные теплоёмкости веществ постоянны и равны q01, сР1 и сР2. Найдём статические характеристики объекта по каналу регулирования G1-q и каналам возмущения G2-q и q2-q (рис.3.19,б). Для этого запишем уравнение теплового баланса:
G1q10cР1+G2q2cР2=(G1+G2)qcР, (3.31)
где cР=(G1cР1+G2cР2)/(G1+G2).
Отсюда
 . (3.32) . (3.32)
Как видно из (3.32), характерной особенностью теплообменников смешения является нелинейность статических характеристик по каналам, связывающим расход любого вещества с температурой смеси q и линейность характеристик по температурным каналам q1-q и q2-q.
При условии малых отклонений координат объекта от их заданных значений можно провести линеаризацию зависимости (3.32) и найти приближённо коэффициенты усиления объекта по каждому каналу.
Обозначим заданные значения входных и выходных координат через G10, G20, q20 и разложим функцию (3.32) в ряд Тейлора в малой окрестности G10, G20, q20.
Переходя к отклонениям y=q-q0, хР=G1-G01, xВ1=G2-G02, хВ2=q2-q02, получим уравнение статической характеристики в виде:
y=kРхР+k1xВ1+k2xВ2, (3.33)
где  , ,  , ,  . .
Рассмотрим несколько вариантов систем автоматизации теплообменников смешения и проведём их сравнительный анализ по качеству процессов регулирования.
Вариант 1.
Задача стабилизации выходной температуры смеси q решается применением одноконтурной замкнутой системы регулирования, в которой регулирующим воздействием является расход G1 (рис. 3.20). Использование регулятора с интегральной составляющей в законе регулирования (ПИ- или ПИД-регулятор) гарантирует поддержание заданного значения q в установившемся режиме, однако качество переходного процесса может оказаться неудовлетворительным при большой инерционности канала регулирования и сильных возмущениях.
Рис.3.20. Функциональная (а) и структурная (б) схемы замкнутой одноконтурной АСР температуры в теплообменнике смешения. Вариант 2.
Включает систему регулирования соотношения расходов G1 и G2 (рис. 3.21). Это разомкнутая система регулирования, способная обеспечить инвариантность регулируемой температуры смеси q к возмущениям по расходу G2, однако при наличии любого другого возмущения q не будет равна заданной.

Рис.3.21. Функциональная (а) и структурная (б) схемы разомкнутой АСР температуры в теплообменнике смешения.
Вариант 3
– система регулирования соотношения расходов G1 и G2 с коррекцией коэффициента соотношения по выходной температуре смеси q (рис.3.22), т.е. двухкаскадная АСР. Основным (внешним) регулятором является регулятор температуры 1, а вспомогательным (внутренним) – регулятор соотношения 2, осуществляющий компенсацию возмущения по расходу G2 .
Рис. 3.22. Функциональная (а) и структурная (б) схемы разомкнутой АСР температуры в теплообменнике смешения с компенсацией двух возмущений: 1 – регулятор соотношения; 2 – компенсатор.
Вариант 4
– система регулирования температуры смеси с коррекцией по двум возмущениям - G2 и q2 , т.е. комбинированная АСР. Динамический компенсатор 2 (рис. 3.23) в данном случае должен содержать вычислительное устройство для расчёта корректирующей поправки на задание по выходной температуре регулятору 1 в зависимости от расхода и температуры второго потока.
Из рассмотренных примеров систем автоматизации наилучшее качество регулирования обеспечивают два последних варианта. При этом, в случае приборной реализации систем, предпочтительнее четвёртый вариант, который легко выполняется на серийных промышленных регуляторах. При использовании ЦВМ или микропроцессорной техники реализация любой из этих систем не представляет затруднений.

Рис. 3.23. Функциональная (а) и структурная (б) схемы комбинированной АСР температуры в теплообменнике смешения:
1 – регулятор температуры; 2 – компенсатор.
Лекция № 11. Автоматизация процесса перемешивания
Общая характеристика процессов перемешивания в жидких средах.
Перемешивание
- гидромеханический процесс взаимного перемещения частиц в жидкой среде с целью их равномерного распределения во всем объеме под действием импульса, передаваемого среде мешалкой, струей жидкости или газа.
Цели перемешивания
♦ Создание суспензий
- обеспечение равномерного распределения твердых частиц в объеме жидкости;
♦ Образование эмульсий, аэрация -
равномерное распределение и дробление до заданных размеров частиц жидкости в жидкости или газа в жидкости;
♦ Интенсификация
нагревания или охлаждения
обрабатываемых масс;
♦ Интенсификация массообмена
в перемешиваемой системе (растворение, выщелачивание).
Основные схемы перемешивания.

■ Механическое
- перемешивание мешалками, вращающимися в аппарате с перемешиваемой средой.
■ Барботажное
- перемешивание путем пропускания через жидкую среду потока воздуха или газа, раздробленного на мелкие пузырьки, которые, поднимаясь в слое жидкости под действием Архимедовой силы, интенсивно перемешивают жидкость.
■ Циркуляционное перемешивание
- перемешивание, осуществляемое путем создания многократных циркуляционных потоков в аппарате с помощью насоса.
Объект управления
Объект управления
- емкость с мешалкой, аппарат непрерывного действия, в котором смешиваются две жидкости А (с концентрацией целевого компонента Са) и Б (с концентрацией целевого компонента Сб) для получения гомогенизированного раствора с заданной концентрацией целевого компонента Сем.
Схема объекта управления.
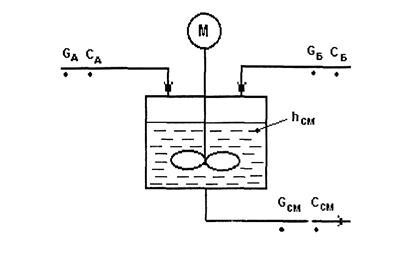
Рис. 1.1.
Показатель эффективности процесса
-
концентрация целевого компонента в гомогенизированном растворе (смеси) - Сем.
Цель управления процессом
- обеспечение заданной концентрации смеси при эффективном и
интенсивном перемешивании.
Эффективность перемешивания
обеспечивается выбором параметров аппарата, перемешивающего устройства, числа оборотов мешалки, обеспечивающих равномерность концентрации смеси в аппарате с заданной интенсивностью (т.е. за заданное время).
Однако в реальных условиях технологические объекты подвержены действию внешних и внутренних возмущений,
которые приводят к отклонению технологических режимов работы от расчетных.
Задача разработки системы автоматизации
обеспечить в условиях действия внешних и внутренних возмущений в процессе эффективное и интенсивное его функционирование с требуемыми характеристиками качества.
Теоретические аспекты процесса механического перемешивания
• При вращении лопасти мешалки в аппарате возникает вынужденное движение
жидкости. которое описывается критериальным уравнением вида:

где
• модифицированный критерий Эйлера EuN
, :

• модифицированный критерий Рейнольдса ReM

• геометрический симплекс Г: 
где ём - диаметр мешалки, м;
п - скорость вращения мешалки, об /с;
р - плотность жидкости, кг/мА
3;
NM
- мощность, потребляемая мешалкой, вт;
р, - динамическая вязкость, Па*с;
Kn - критерий мощности.
Методика расчета конструктивно-технологических параметров процесса
механического перемешивания.
1. Выбирают тип мешалки, ее диаметр dM
. Размеры аппарата DАПП
и НАПП
.
2. Определяют коэффициент Ст в зависимости от размеров аппарата и тина перемешивающего устройства.
3. Определяют число оборотов мешалки: 
4. Рассчитывают ReM
по соотношению (3).
5. По графику KN = f(ReM
) находят KN
6. Рассчитывают NM
из выражения (2):

7. Рассчитывают мощность Нцв, потребляемую приводом перемешивающего устройства:

где К - поправочный коэффициент, учитывающий конструктивные особенности аппарата и перемешивающего устройства; rine
p - к.п.д. передачи.
В реальной установке непрерывного действия :

Материальный баланс по целевому компоненту
Уравнение динамики:

Уравнение статики при 

На основании (1) (2) можно принять:
Материальный баланс по всему веществу
Уравнение динамики:

Уравнение статики при 

На основании (4) (5) можно принять:

Информационная схема
• Управляемые переменные - Ссм
и hCM
.
• Возможные контролируемые возмущения: СА
,СБ
, причем задано, что СЛ
» СБ
.
• Возможные управляющие воз действия :GA
,GE
,GCM
.
• Однако, в данном случае, GCM
определяется последующим технологическим процессом и поэтому не может использоваться в качестве регулирующего воздействия.
Анализ уравнения динамики на основе материального баланса по целевому компоненту
Уравнение динамики в нормализованном виде

Начальные условия для вывода передаточной функции по каналу управления GА
-ССМ

Уравнение статики

Уравнение динамики в приращениях:
(после постановки начальных условий в выражение (1), вычитания уравнения статики(2) и приведения подобных членов):

Уравнение динамики с безразмерными переменными:

Нормализованное уравнение динамики объекта во временной области без учёта транспортного запаздывания:

Уравнение динамики по каналу управления GА
-ССМ
во временной области с учётом транспортного запаздывания:

Передаточная функция объекта по каналу управления GА
-ССМ :

где:

где VТРУБ
– объём трубопровода от Р.О. до входа в аппарат.
Анализ уравнения динамики на основе материального баланса по всему веществу
Уравнение динамики:

Начальные условия для вывода передаточной функции по каналу управления GБ
-hCM
:
Уравнение статики:

Уравнение динамики в приращениях:
(после подстановки начальных условий в выражение (1), вычитания уравнения статики (2) и приведения подобных членов)

Уравнение динамики с безразмерными переменными:

Нормализованное уравнение динамики объекта во временной области:

Уравнение динамики по каналу управления GБ
-hCM
во временной области с учётом транспортного запаздывания:

Передаточная функция объекта по каналу управления GБ
-hCM
:

где:

Анализ статической характеристики объекта
Уравнение статики на основе материального баланса по целевому компоненту:

| Из уравнения (1) выразим  в явном виде: в явном виде:
|

Анализ выражения (2) показывает, что:
• Статическая характеристика линейная по каналам: СА
- Ссм
; Сь
- Ссм
;
• Статическая характеристика нелинейная по каналам G Л
- Ссм
; G Б
- Ссм
.
Линеаризованное представление статистической характеристики на основе стабилизации соотношения расходов  : :

Линеаризованное представление статической характеристики через разложение в ряд Тейлора:

Обозначим:

Линеаризованное представление приращения выходной переменной
через приращения всех возможных входных переменных:

Типовая схема автоматизации процесса перемешивания

Типовое решение автоматизации.
1.
Регулирование
• Регулирование концентрации Ссм
по подаче реагента GA
- как показателя
эффективности процесса перемешивания с целью получения гомогенизированного раствора.
• Регулирование уровня в аппарате hCM
по подаче реагента Gb - для обеспечения материального баланса по жидкой фазе.
2. Контроль.
• расходы - GA
,
Gk
, Gcm
;
• концентрация - Ссм
;
• уровень - hCM
-
3. Сигнализация.
• существенные отклонения Ссм
и hCM
от задания;
• резкое падение расходов исходных реагентов GA
^ или GB
^, при этом формируется сигнал «В схему защиты».
4. Система защиты.
По сигналу «В схему защиты» - отключаются магистрали подачи реагентов GA
, GB
и отбора смеси GCM
.
Лекция №12. Регулирование кожухотрубных теплообменников
Рассмотрим теплообменники с изменяющимся агрегатным состоянием веществ. Особенность этих теплообменников как объектов регулирования состоит в том, что при постоянном давлении /у и отсутствии переохлаждения образующегося конденсата (или V\_y перегрева образующегося пара) температура жидкой и паровой фаз одинакова и по ней нельзя судить об интенсивности процесса испарения или конденсации. В этом случае основным показателем процесса теплообмена является уровень жидкой фазы.
Постоянство температуры в той части теплообменника, где происходит конденсация или испарение вещества, позволяет рассматривать ее как звено с сосредоточенными параметрами. Ту часть теплообменника, в которой происходит лишь нагрев или охлаждение вещества и температура изменяется по длине теплообменника, следует рассматривать как звено с распределенными параметрами.
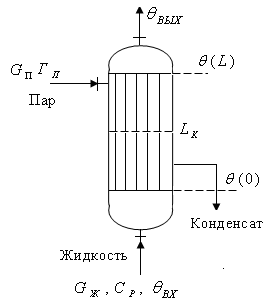
Рис. 1. Принципиальная схема парожидкостного теплообменника.
Для теплообменников этого типа задача регулирования и выбор системы автоматизации диктуются назначением аппарата. В теплообменниках, предназначенных для нагрева вещества до заданной температуры за счет тепла конденсации греющего пара (или для охлаждения вещества за счет отбора тепла испаряющейся жидкостью), задачей регулирования является стабилизация температуры технологического потока на выходе из теплообменника. В испарителях или конденсаторах, предназначенных для испарения или конденсации технологического потока, задача регулирования сводится к поддержанию материального баланса по технологическому потоку.
Рассмотрим особенности динамических характеристик этого типа теплообменников на примере кожухотрубного парожидкостного теплообменника, предназначенного для нагрева жидкости от температуры  до до  (рис. 1). Примем, что пар — насыщенный, а конденсат отводится при температуре конденсации. (рис. 1). Примем, что пар — насыщенный, а конденсат отводится при температуре конденсации.
 Рассмотрим несколько вариантов систем регулирования выходной температуры технологического потока в паровых теплообменниках на примере парожидкостного теплообменника. Рассмотрим несколько вариантов систем регулирования выходной температуры технологического потока в паровых теплообменниках на примере парожидкостного теплообменника.
Вариант 1.
Одноконтурная замкнутая АСР (рис. 2.45) при использовании ПИ- или ПИД-регулятора гарантирует регулирование температуры без статической ошибки, однако при сильных возмущениях по расходу или температуре жидкости качество переходного процесса может оказаться неудовлетворительным.
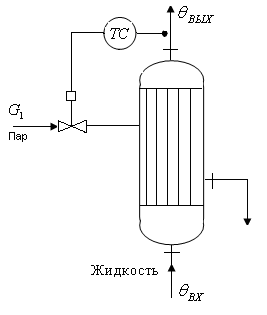
Рис. 2. Схема одноконтурной АСР температуры жидкости в парожидкостном теплообменнике.
Вариант 2.
Введение динамической компенсации возмущений по  или или  оказывается нецелесообразным, так как теоретические компенсаторы физически нереализуемы, а использование приближенных компенсаторов может оказаться неэффективным. Поэтому на практике ограничиваются статической компенсацией этих возмущений. Примером таких систем является каскадная АСР соотношения расходов Gn/Gx с коррекцией по (рис. 3) оказывается нецелесообразным, так как теоретические компенсаторы физически нереализуемы, а использование приближенных компенсаторов может оказаться неэффективным. Поэтому на практике ограничиваются статической компенсацией этих возмущений. Примером таких систем является каскадная АСР соотношения расходов Gn/Gx с коррекцией по (рис. 3)
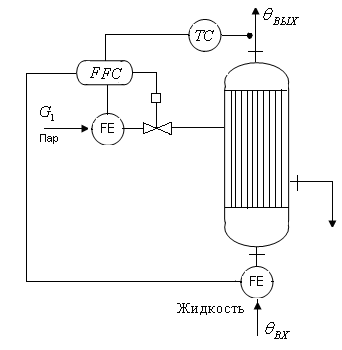
Рис. 3. Каскадная АСР температуры жидкости в парожидкостном теплообменнике (с регулятором соотношения расходов во внутреннем контуре).
Вариант 3.
Каскадная система регулирования температуры (или давления) в межтрубном пространстве с коррекцией задания по (рис. 4.) будет эффективной при сильных возмущениях по давлению или температуре греющего пара. Температура (или давление) в кожухе в данном случае играет роль промежуточной координаты, которая быстрее реагирует на эти возмущения, чем выходная температура жидкости.
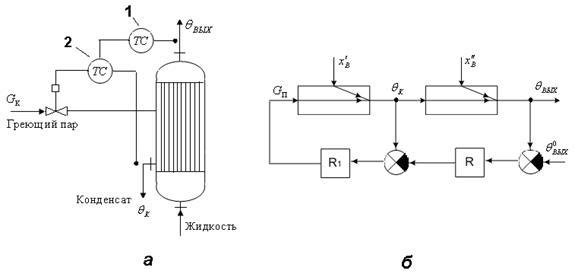
Рис. 4. Функциональная (а) и структурная (б) схемы каскадной АСР температуры в парожидкостном теплообменнике (с регулятором температуры конденсата во внутреннем контуре): 1 – регулятор температуры жидкости; 2 – регулятор температуры конденсата в кожухе.
Вариант 4.
Если требуется высокое качество регулирования, целесообразно применение схемы с байпасированием технологического потока вокруг теплообменника и последующим смешением нагретого и холодного потоков. В этом случае появляется дополнительное управляющее воздействие — распределение потоков Gx и G2. На рис. 5 показан пример системы автоматизации такого теплообменника. Регулятор температуры выполняет вспомогательную функцию— стабилизацию температуры 0"; главная задача — регулирование температуры жидкости после смешения — возлагается на регулятор 2. В такой системе качество регулирования 0ВЫх определяется динамикой второго контура, в котором объект представляет собой практически безынерционное звено, так как при малом объеме камеры смешения постоянная времени процесса смешения практически равна нулю (Рис. 5.).
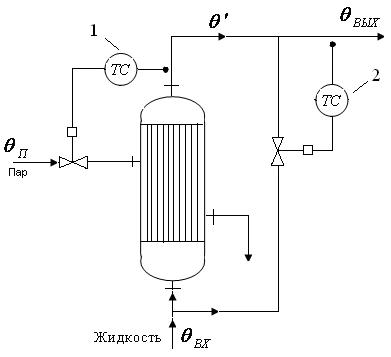
Рис. 5. Регулирование температуры жидкости в схеме с байпасированием потока вокруг теплообменника:
1 – регулятор температуры жидкости на выходе из теплообменника; 2 – регулятор температуры жидкости после смешения.
Лекция №13. Особенности автоматизации испарителей и конденсаторов
Как указывалось выше, задача автоматизации этих аппаратов состоит в поддержании материального баланса по технологическому потоку; при этом в качестве выходной координаты обычно выбирают уровень жидкости в аппарате. Рассмотрим для примера автоматизацию испарителя (рис. 6.). Задачей регулирования является стабилизация уровня  . К основным возмущениям можно отнести расход . К основным возмущениям можно отнести расход  и температуру и температуру  жидкости, температуру греющего пара жидкости, температуру греющего пара  и теплопотери и теплопотери  к регулирующим воздействиям — расход греющего пара к регулирующим воздействиям — расход греющего пара  и отбор испаренного продукта и отбор испаренного продукта  ; к выходным координатам — уровень жидкости ; к выходным координатам — уровень жидкости  и давление в аппарате Р. и давление в аппарате Р.

Рис. 6. Принципиальная схема испарителя.
Анализ процессов, протекающих в испарителе, показывает, что он тносится к многосвязным объектам. Действительно, увеличение расхода греющего пара приводит к более интенсивному испарению, что вызывает одновременно уменьшение уровня и повыше те давления в аппарате. Аналогично изменение отбора пара G влияет не только на давление в аппарате, но и на интенсивность испарения продукта, а следовательно, и на уровень жидкости. На рис. 7. показана структурная схема испарителя, отражающая взаимосвязь между координатами. Динамические характеристики объекта по отдельным каналам аппроксимируются линейными звеньями.
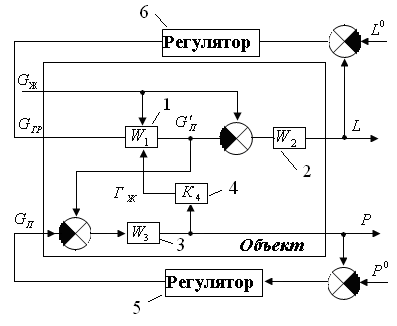
Рис. 7. Структурная схема системы регулирования уровня и давления в испарителе: 1 – звено, описывающее тепловой процесс в жидкости; 2 – звено, отражающее гидродинамику в жидкой фазе; 3 – звено, отражающее гидродинамику в паровой фазе; 4 – звено, учитывающее влияние давления на теплоту испарения жидкости; 5 – регулятор давления; 6 – регулятор уровня.
Рассмотрим несколько вариантов систем регулирования испарителей и конденсаторов.
Вариант 1
(рис. 8,а) включает два замкнутых контура регулирования: регулятор 5 стабилизирует давление в аппарате, частично компенсируя возмущения по каналу  ; регулятор уровня 6 обеспечивает поддержание материального баланса в аппарате по технологическому потоку. ; регулятор уровня 6 обеспечивает поддержание материального баланса в аппарате по технологическому потоку.
Вариант 2
(рис. 8,6) отличается от предыдущего применением каскадной системы регулирования соотношения расходов греющего пара и жидкости  c коррекцией c коррекцией  по уровню жидкости. Регулятор соотношения 3 вводит статическую компенсацию возмущений по расходу жидкости, поэтому данная система регулирования предпочтительнее при сильных возмущениях, поэтому технологическому параметру. по уровню жидкости. Регулятор соотношения 3 вводит статическую компенсацию возмущений по расходу жидкости, поэтому данная система регулирования предпочтительнее при сильных возмущениях, поэтому технологическому параметру.
Вариант
(рис. 8,в) служит примером системы регулирования, в которой расход греющего пара рассчитывается в вычислительном устройстве 1 по контролируемым возмущениям  и корректируется регулирующим устройством 2 при отклонении уровня от заданного значения. и корректируется регулирующим устройством 2 при отклонении уровня от заданного значения.

Рис. 8. Примеры систем автоматизации испарителей: а – на основе одноконтурных АСР; б – с использованием каскадной АСР; в – с использованием комбинированной АСР уровня; 1 – регулятор давления; 2 – регулятор уровня; 3 – регулятор соотношения расходов; 4 – вычислительное устройство.
Лекция №14. РЕГУЛИРОВАНИЕ МАССООБМЕННЫХ ПРОЦЕССОВ
В химической технологии для разделения веществ широко используют массообменные процессы: абсорбцию, экстракцию, ректификацию, адсорбцию и сушку. Несмотря на разнообразие этих процессов, и способов их аппаратурного оформления, все они подчиняются единым закономерностям и как объекты автоматизации обладают рядом общих особенностей.
Промышленные аппараты проектируют для определенных значений режимных параметров и составов исходных веществ, при которых установка обеспечивает заданное качество разделения. В реальных условиях случайные возмущения приводят к нарушению материального и теплового балансов в аппарате, изменению давления и температуры и в конечном итоге — к отклонению составов получаемых продуктов от расчетных. Поэтому одна из основных задач регулирования массообменных процессов — стабилизация режимных параметров с целью поддержания материального и теплового балансов в аппарате при различных возмущениях.
Общей особенностью массообменных процессов в промышленных условиях является их большая энергоемкость, поэтому система автоматизации должна способствовать снижению энергозатрат на разделение при условии обеспечения заданного качества продуктов.
Большинство массообменных процессов проводят в аппаратах колонного типа, диаметр которых в промышленных условиях достигает нескольких метров, а высота — нескольких десятков метров. Приведенные постоянные времени и запаздывание о таких аппаратах составляют минуты и десятки минут, а одноконтурные системы регулирования характеризуются большой динамической ошибкой и большой длительностью переходных процессов. Для повышения качества переходных процессов в системах автоматизации массообменных установок широко используют комбинированные АСР, вводящие коррекцию по наиболее сильным возмущениям, и каскадные АСР, использующие дополнительные сигналы из промежуточных точек аппаратов.
Наибольшие сложности при регулировании массообменных процессов чаще всего возникают из-за отсутствия автоматических приборов для непрерывного контроля состава получаемых продуктов. В этих случаях регулирование состава ведут по косвенным параметрам —температуре кипения смеси, ее плотности и т. п. При этом возникают дополнительные сложности, связанные с компенсацией влияния возмущающих факторов на взаимосвязь между косвенным параметром и составом.
Лекция №15. Автоматизация ректификационных установок
Ректификационные установки служат для разделения жидких однородных смесей на составляющие вещества (или группы веществ) в результате противоточного взаимодействия смеси паров и жидкой смеси. Рассмотрим особенности ректификационной установки как объекта автоматизации на примере установки для разделения бинарной смеси с концентрацией в ней легколетучего компонента  на дистиллят и кубовую жидкость с концентрациями легколетучего в них на дистиллят и кубовую жидкость с концентрациями легколетучего в них  и и  . Примем следующие обозначения (рис. 1): . Примем следующие обозначения (рис. 1):  - расходы питания, дистиллята, кубового продукта, греющего пара в кипятильник, теплоносителя в подогреватель питания, хладагента в дефлегматор, флегмы. - расходы питания, дистиллята, кубового продукта, греющего пара в кипятильник, теплоносителя в подогреватель питания, хладагента в дефлегматор, флегмы.
Постановка задачи управления. Поскольку затраты на ректификацию являются одной из самых существенных составляющих в себестоимости продукции, задача автоматизации ректификационных установок часто ставится как задача оптимального управления, которой подчиняются задачи автоматического регулирования отдельных параметров. В зависимости от назначения ректификационной колонны используют различные критерии оптимальности.

Рис.1. Принципиальная схема ректификационной установки:
1 – ректификационная колонна; 2 – подогреватель питания; 3 – кипятильник; 4 – флегмовая ёмкость.
Статические характеристики ректификационных колонн
Для однозначного определения состояния системы требуется задание четырех независимых переменных. Чаще всего ими являются расход  „ и состав „ и состав  питания, отбор дистиллята питания, отбор дистиллята  и паровой поток в нижней части колонны V. и паровой поток в нижней части колонны V.
При стационарном режиме в ректификационной колонне устанавливается определенный профиль концентраций по высоте колонны, причем каждому значению или соответствует свой профиль концентраций. Наибольшей чувствительностью по отношению к возмущениям и к регулирующим воздействиям обладают промежуточные тарелки в верхней и нижней части колонны, называемые контрольными тарелками. Коэффициенты усиления для них принимают максимальное значение по сравнению с коэффициентами усиления других тарелок в данной секции колонны. По отношению к возмущениям со стороны питания составы на контрольных тарелках являются промежуточными координатами и обладают меньшей инерционностью, чем составы продуктов. Поэтому составы на контрольных тарелках часто используют в качестве регулируемых координат вместо составов продуктов.
Динамические характеристики ректификационных колонн.
При изучении динамики изменения концентрации на каждой ступени разделения в колонне можно выделить три составляющие процесса: изменение объема жидкости при изменении ее расхода; изменение концентрации, вызванное изменением скорости парового потока; изменение концентрации в объеме жидкости на тарелке. Точный учет всех названных факторов не представляется возможным ввиду сложности математического описания процесса. Поэтому обычно влиянием первых двух факторов на изменение концентрации пренебрегают и ограничиваются третьей составляющей процесса.
Изменение состава жидкой фазы на изолированной тарелке, на которой обеспечивается идеальное перемешивание, связано с изменением состава или скорости потоков дифференциальным уравнением первого порядка. При последовательном соединении нескольких тарелок их постоянные времени взаимосвязаны, и прямые методы точного анализа оказываются весьма трудоемкими. Значения постоянных времени зависят от наклона кривой фазового равновесия, времени пребывания на тарелке, скоростей потоков в колонне и расхода питания. Для того чтобы оценить влияние этих параметров на значения постоянных времени, рассмотрим простейшие примеры колонн с одной и двумя ступенями разделения.
Для колонн с несколькими ступенями разделения сохраняется такая же качественная зависимость между наклоном кривой фазового равновесия и постоянными времени, как -и для однотарельчатой колонны, хотя сама зависимость гораздо сложнее.
Примеры систем автоматизации ректификационных установок.
Вариант 1.
Простейшая система автоматизации ректификационной установки включает шесть одноконтурных ACP (рис. 2.), каждая из которых выполняет одну из рассмотренных выше задач регулирования. В целом эта система обеспечивает стабилизацию состава дистиллята и поддержание материального и теплового балансов в установке. Основным регулятором, стабилизирующим состав дистиллята (при разделении бинарной смеси при постоянном давлении), является регулятор температуры верха колонны 1, воздействующий на отбор дистиллята. Регулятор температуры 2 стабилизирует температуру питания. Регуляторы уровня 3 и 4 обеспечивают поддержание баланса в системе по жидкой фазе, а регулятор давления 5—по паровой фазе. Регулятор расхода 6 стабилизирует подачу греющего пара в кипятильник.
Если задачей регулирования является стабилизация состава кубового продукта, то расход греющего пара задается регулятором температуры низа колонны 6а, а расход дистиллята стабилизируется регулятором 1а. Одновременное регулирование составов (или температур) верха и низа колонны обычно не применяют, так как эти координаты связаны между собой, и их одновременное регулирование по обратной связи может привести к снижению запаса устойчивости системы.

Рис. 2. Система автоматизации ректификационной установки, построенная на одноконтурных АСР отдельных технологических параметров:
1 - регулятор температуры верха колонны; 2 – регулятор температуры питания; 3 – регулятор уровня в кубе колонны; 4 – регулятор уровня во флегмовой ёмкости; 5 – регулятор давления в колонне; 6 – регулятор расхода греющего пара; 1а – регулятор расхода дистиллята;
6а – регулятор температуры низа.
Несмотря на простоту, рассматриваемая система автоматизации обладает рядом недостатков. Так, стабилизация расхода греющего пара без учета реальной обстановки в системе обычно приводит к перерасходу пара, поскольку регулятору расхода устанавливается завышенное задание с учетом возможных колебаний энтальпии греющего пара, переохлаждения флегмы и других возмущений в процессе.
Отсутствие компенсирующих воздействий по возмущениям со стороны питания приведет к большим динамическим ошибкам регулирования составов продуктов, так как регулятор состава (или температуры) на конце колонны получит сигнал об отклонении регулируемой координаты от заданного значения лишь после того, как изменится состав жидкости по всей высоте колонны.
Использование температуры продукта для регулирования его состава имеет еще один существенный недостаток: колебания температуры при изменении состава соизмеримы с ее колебаниями при изменении давления в аппарате и часто оказываются соизмеримы с погрешностью контрольно-измерительного прибора. Например, при разности температур кипения чистых продуктов 20°С (например,  =100°С; =100°С;  = 8О°С) и допустимых колебаниях состава продукта ± 1 % соответствующие колебания температуры составят ±0,2 °С. В то же время для потенциометра со шкалой 0—150 °С и классом точности 0,5 погрешность измерения составит 0,75 °С. На практике при разделении близкокипящих смесей веществ сколько-нибудь ощутимые колебания температуры можно наблюдать только в средней части каждой секции колонны. Эту особенность следует учитывать при выборе класса точности и шкалы вторичного прибора, а также места отбора импульса по температуре. = 8О°С) и допустимых колебаниях состава продукта ± 1 % соответствующие колебания температуры составят ±0,2 °С. В то же время для потенциометра со шкалой 0—150 °С и классом точности 0,5 погрешность измерения составит 0,75 °С. На практике при разделении близкокипящих смесей веществ сколько-нибудь ощутимые колебания температуры можно наблюдать только в средней части каждой секции колонны. Эту особенность следует учитывать при выборе класса точности и шкалы вторичного прибора, а также места отбора импульса по температуре.
Вариант 2
(рис. 3.) отличается от первого использованием регуляторов 6 соотношения расходов греющего пара и питания (или расходов флегмы и питания), обеспечивающих минимизацию энергозатрат на разделение. Кроме того, для регулирования температуры продукта применяют каскадную АСР с дополнительным импульсом по производной от температуры на контрольной тарелке (регуляторы 1 и 1а), что позволяет уменьшить динамическую ошибку регулирования.

Рис. 3. Система автоматизации ректификационной установки со статической компенсацией возмущений по расходу питания и с каскадной АСР температуры верха колонны:
1 – регулятор температуры верха колонны; 1а – дифференциатор; 2 – регулятор температуры питания; 3,4 – регулятор уровня; 5 – регулятор давления; 6 – регулятор соотношения.
Вариант 3
(рис. 4.) является примером системы автоматизации, которая может быть реализована с применением средств вычислительной техники. Здесь расходы дистиллята и греющего пара регулируются регуляторами / и 6, задания которым корректирует вычислительное устройство 7 в зависимости от расхода и состава питания и энтальпии греющего пара с учетом динамических характеристик колонны. Эта АСР должна обеспечить приближенную инвариантность системы по отношению к контролируемым возмущениям. Однако наличие неконтролируемых возмущений (например, переохлаждение флегмы) приведет к нарушению режима в колонне и отклонению состава продукта от заданного.

Рис. 4. Система автоматизации ректификационной установки с компенсацией возмущений по расходу и составу питания и температуре греющего пара: 1,6 – регуляторы расхода; 2 – регулятор температуры; 3,4 – регуляторы уровня; 5 – регулятор давления; 7 – вычислительное устройство.
Рассмотренные системы не исчерпывают всего многообразия способов и систем регулирования, применяемых для ректификационных установок. Так, на рис. 5 показана схема регулирования давления в колонне отводом инертных газов из флегмовой емкости. Регулирование соотношения расходов флегмы и дистиллята с коррекцией по составу дистиллята обеспечивает стабилизацию состава продукта в результате изменения флегмового числа. Производительность колонны по дистилляту поддерживается регулятором расхода 1, а уровень во флегмовой емкости регулируется изменением подачи хладагента в дефлегматор.
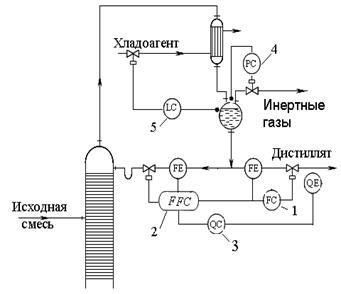
Рис. 5. Пример системы регулирования верха тарельчатой ректификационной колонны:
1 – регулятор расхода дистиллята; 2 – регулятор соотношения расходов флегмы и дистиллята; 3 – регулятор состава дистиллята; 4 – регулятор давления во флегмовой ёмкости; 5 – регулятор уровня во флегмовой ёмкости.
В насадочных ректификационных колоннах одним из основных регулируемых параметров является перепад давления, обеспечивающий заданный гидродинамический режим в аппарате. Обычно перепад давления регулируют изменением подачи греющего пара в кипятильник (регулятор 5 на рис. 6.).

Рис. 6. Пример системы автоматизации насадочной ректификационной колонны: 1 – регулятор состава; 2,3 – регуляторы уровня; 4 – регулятор давления; 5 – регулятор перепада давления.
Лекция №16. Автоматизация абсорбционных и выпарных установок
На примере процесса ректификации была рассмотрена общая методика анализа массообменных установок как объектов автоматизации и последовательность выбора систем регулирования. Другие массообменные процессы, отличаясь кинетикой, конструкцией аппаратов и другими характерными особенностями, имеют много общего с процессом ректификации. Поэтому не будем останавливаться на анализе этих процессов, а ограничимся лишь рассмотрением примеров автоматизации некоторых из них.
Абсорбционные установки являются промежуточными стадиями в технологическом процессе, поэтому задача оптимального управления ими подчиняется общей задаче управления процессом в целом. Чаще всего —это задача минимизации технологической составляющей себестоимости готового продукта, характеризующей стадию абсорбции. В зависимости от конкретных условий работы абсорбционной установки такая задача сводится либо к максимизации степени абсорбции, либо к минимизации энергозатрат на разделение смеси.
Основные источники возмущений в процессе абсорбции — расход, состав и температура газа, поступающего на абсорбцию, а также в некоторых случаях температура и состав абсорбента. Основными управлениями служат расход абсорбента, подаваемого на орошение колонны, и расход кубового продукта, отводимого из колонны.

Рис. 7. Примеры систем автоматизации абсорбционной колонны:
а — на основе одноконтурных АСР; б — регулирование соотношения расходов абсорбента и газовой смеси с коррекцией по составу кубового продукта; в — каскадная АСР состава кубового продукта; 1, 1' — регуляторы уровня; 2 —регулятор давления; 3 — регулятор состава.
Для поддержания материального баланса по газовой и жидкой фазам в колоннах предусматривается стабилизация давления и уровня в кубе.
На рис. 7. показаны примеры систем автоматизации абсорбционной установки. Система автоматизации, построенная на одноконтурных АСР (рис. 7, с), обеспечивает поддержание материального и теплового балансов в установке (регуляторы уровня 1 и давления 2) и стабилизацию состава продукта (регулятор 3). Введение корректирующего сигнала при возмущениях по расходу питания через регулятор соотношения расходов 4 (рис. 7, б) позволит частично компенсировать эти возмущения и повысить качество регулирования. На рис. 7, в показан пример каскадной АСР, в которой в качестве вспомогательной регулируемой переменной выбран состав на контрольной тарелке.
Процесс выпаривания можно проводить в однокорпусной выпарной установке (простое выпаривание) или в многокорпусной установке (многократное выпаривание). В последнем случае достигается уменьшение энергозатрат в результате использования вторичных паров в качестве греющего пара во втором и последующих корпусах.
Задача регулирования процесса выпаривания состоит в стабилизации концентрации упаренного раствора на выходе из последнего выпарного аппарата. Основными источниками возмущения служат колебания расхода и концентрации исходного раствора, энтальпия греющего пара и теплопотери в окружающую среду. При этих условиях в качестве основного управляющего воздействия для процесса выпаривания выбирают изменение расхода греющего пара. Для поддержания материального и теплового балансов предусматриваются стабилизация уровня во всех аппаратах изменением расхода раствора на выходе из аппаратов (регулирование «на стоке»), а также стабилизация давления (разрежения) изменением подачи хладагента в конденсатор.
Если исходный раствор поступает на выпаривание из промежуточной емкости, в качестве регулирующего воздействия может быть выбран расход упаренного раствора, который будет устанавливаться в зависимости от выходной концентрации раствора. Регулирование уровня в этом случае должно проводиться изменением подачи раствора в каждый из аппаратов (регулирование «на притоке») или расхода греющего пара.
На рис. 8. приведены примеры систем автоматизации двухкорпусной установки: построенной на основе одноконтурных АСР (а), комбинированной .АСР (б) и каскадной АСР (в).

Рис. 8. Примеры систем автоматизации выпарной установки: а – на основе одноконтурных АСР; б – регулирование соотношения расходов греющего пара и исходного раствора с коррекцией по концентрации; в – каскадная АСР концентрации упаренного расхода.
Содержание
Лекция №1. Автоматизация технологических объектов и процессов
Лекция №2. Законы регулирования
Лекция №3. Комбинированная САР
Лекция №4. Каскадные САР
Лекция №5. Регулирование основных технологических параметров
Лекция №6. Регулирование уровня
Лекция №7 Регулирование давления
Лекция № 8. Регулирование рН
Лекция № 9. Регулирование параметров состава и качества
Лекция № 10. Регулирование тепловых процессов
Лекция № 11. Автоматизация процесса перемешивания
Лекция № 12. Регулирование кожухотрубных теплообменников
Лекция № 13. Особенности автоматизации испарителей и конденсаторов
Лекция № 14. Регулирование массообменных процессов
Лекция № 15. Автоматизация ректификационных установок
Лекция № 16. Автоматизация абсорбционных и выпарных установок
|