| Министерство образования и науки Украины
Донецкий национальный технический университет
Факультет Механический
Кафедра ”Металлорежущие станки и системы”
КУРСОВОЙ ПРОЕКТ
по дисциплине: “ Металлообрабатывающее оборудование ”
на тему: «Модернизация привода главного движения станка модели 6С12»
ПК.07.04.28.03.00.00
Выполнил:
студент гр. МС 04-н Гончаренко Д. О.
Консультант Молчанов А. Д.
Нормоконтролер Молчанов А. Д.
Донецк 2007
Реферат
Курсовой проект: 31 с., 5 табл., 5 рис., 8 источников, 2 приложения.
Объект исследования – привод главного движения с бесступенчатым регулированием частоты.
В курсовом проекте выбран электродвигатель постоянного тока с диапазоном частот, перекрывающим исходный диапазон, произведен кинематический расчет узла, расчеты мощности, крутящих моментов каждого вала. Произведены проверочные расчеты зубчатых передач, подшипников и проведен расчет наиболее нагруженного вала. Выбрана система смазки и смазочный материал деталей станка. Выбраны подшипники качения, а также выбраны и рассчитаны шлицевые соединения. Выполнены чертежи развертки привода главного движения, общего вида вертикально-фрезерного станка (прототипа), кинематическая схема.
СТАНОК, ВАЛ, ШПОНКА ПОДШИПНИК, СИСТЕМА СМАЗКИ, ШПИНДЕЛЬ, ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Задание
Цель: модернизация привода главного движения станка модели 6С12 с бесступенчатым изменением частоты вращения шпинделя.
Исходные данные:
Технические характеристики вертикально-фрезерного станка модели 6С12.
Содержание
Введение......................................................................................................... 5
1. Характеристика и назначение вертикально-фрезерных станков............ 6
2. Выбор предельных режимов резания и электродвигателя..................... 7
2.1 Размеры заготовок и инструментов........................................................ 7
2.2 Выбор предельных режимов резания.................................................... 7
2.3 Предварительное определение мощность электродвигателя главного движения 11
3. Кинематический расчет привода станка................................................... 14
4. Силовой расчет привода станка............................................................... 16
5 Прочностной расчет передач приводов станков...................................... 17
5.1 Расчет на прочность стальных цилиндрических зубчатых передач..... 17
5.1.1 Проверочный расчет косозубой передачи.......................................... 17
5.1.2 Проверочный расчет конической передачи........................................ 20
5.2 Расчет клиноременной передачи............................................................ 21
6 Определение параметров валов................................................................. 23
6.1. Приближенный расчет валов................................................................. 23
6.2. Уточненный расчет валов...................................................................... 23
6.3. Расчет вала на усталость........................................................................ 25
6.4. Выбор элементов передающих крутящий момент................................ 28
Рисунок 5 Размеры шпоночного соединения............................................... 29
7. Выбор подшипников................................................................................. 31
8. Расчет динамических характеристик привода главного движения......... 34
9. Определение системы смазки.................................................................... 41
Заключение.................................................................................................... 42
Список использованной литературы............................................................ 43
Введение
В настоящее время наблюдается тенденция на повышение уровня автоматизации производственных процессов. В производство все более внедряется автоматизированное оборудование, работающее без непосредственного участия человека или значительно облегчающее труд рабочего. Это позволяет значительно сократить трудоемкость производственного процесса, снизить себестоимость выпускаемой продукции, увеличить производительность труда. Поэтому главная задача инженеров - разработка автоматизированного оборудования, расчет его основных узлов и агрегатов, выявление наиболее оптимальных технических решений и внедрение их в производство.
Целью данного курсового проекта является модернизация привода главного движения станка модели 6С12 с бесступенчатым изменением частоты вращения шпинделя.
Модернизация привода главного привода включает определение диапазона регулирования скоростей, построение кинематической схемы, определение требуемой эффективной мощности привода, проверочные расчеты зубчатых передач, валов и уточненный расчет на усталость самого нагруженного вала, выбор шпоночных соединений передающих крутящий момент, выбор подшипников опор валов, выбор системы смазки.
1 Характеристика и назначение вертикально-фрезерных станков
Станки вертикально-фрезерной подгруппы предназначены для обработки плоскостей, пазов различного профиля, фасонных деталей, а с применением делительных головок – зубчатых колес методом единичного деления и винтовых канавок. Обработка деталей производится торцовыми, пальцевыми, концевыми фрезами. Согласно заданию в качестве базового станка принимаю станок модели 6С12. Станок используется в условиях единичного и серийного производства. Достаточная мощность привода и диапазон скоростей скоростей и подач позволяет вести обработку как быстрорежущими фрезами, так и фрезами, оснащенными пластинками из твердого сплава.
Главное движение на фрезерных станках – вращение фрезы, движение подачи – перемещение стола с заготовкой. Фреза закрепляется в шпинделе при помощи оправки, имеющей конический хвостовик с конусностью 7:24 и шомпола. Заготовка закрепляется на столе при помощи различных приспособлений.
Основные характеристики вертикально-фрезерных консольных станков:
- размеры стола, задаваемого его номером;
- наибольшее перемещение стола в вертикальном, горизонтальном и поперечном направлениях;
- пределы изменения частоты вращения и подач.
2. Выбор предельных режимов резания и электродвигателя
2.1 Размеры заготовок и инструментов
Размеры заготовок и инструментов, подлежащих обработке на универсальных станках, определяют из экономических соображений, связывая их с одной из размерных характеристик станка. В таблице 2.1 приведены ориентировочные значения предельных размеров заготовок и инструмента, которые принимаются при проектировании универсальных станков.
Таблица 1 ‑ Рекомендуемые значения предельных размеров
| № п/п
|
ТИП СТАНКА
|
Диаметр заготовки или инструмента, мм
|
| 
|

|
| 1
|
2
|
3
|
4
|
| 3
|
Вертикально-фрезерные со столом  , мм , мм
|
(0,6-0,8)
|
(0,1-0,2) 
|
Ширина стола =320; =320;
=0,8*320=256мм
 =0,2*320=64мм =0,2*320=64мм
2.2 Выбор предельных режимов резания
Выбор предельных режимов резания, которые должны осуществляться на станке, рассчитывают при выполнении различных видов работ и на основе анализа полученных результатов.
Глубину резания и подачи выбирают из нормативных документов [1] и в зависимости от работ, которые предполагается выполнять на станке. Как правило, расчет ведут по основной (ведущей) операции, для которой спроектирован станок. В нашем случае это фрезерование торцовой фрезой, при котором возникают наибольшие силы резания.
Выбор предельных скоростей резания для расчета характеристик универсальных станков производят при следующих условиях [3]:
Для фрезерных станков наибольшую скорость резания  определяют при условии обработки определяют при условии обработки
стальной заготовки с  =500 МПа фрезой наименьшего диаметра; =500 МПа фрезой наименьшего диаметра;
материал режущей части ‑ пластинка из твердого сплава Т15К6.
подача на зуб фрезы, стойкость, глубина резания и ширина фрезерования берутся минимальными.
При определении минимальной скорости резания  : :
глубину резания, подачу на зуб, ширину фрезерования, диаметр фрезы и стойкость принимают максимальными;
материал фрезы - быстрорежущая сталь; материал заготовки - легированная сталь с = 750 МПа.
В качестве расчетной принимают ширину фрезерования
 , ,
 , ,
где  , ,  - наибольшая и наименьшая ширина фрезерования; - наибольшая и наименьшая ширина фрезерования;
 , ,  - наименьший и наибольший диаметр фрезы. - наименьший и наибольший диаметр фрезы.
При фрезерной обработке, где материал режущей части фрезы твёрдый сплав, для наибольшей скорости резания Vmax имеем [1]:
 , где , где
СV=332, m=0.2, y=0.4, x=0.1, р=0, u=0.2, q=0.2 – коэффициент и показатели степени.[1.стр.262]
tMIN=0,5 мм – минимальный припуск.
SZMIN=0.09 мм/зуб – минимальная подача на зуб.
Т=180 минут – стойкость инструмента.
Кv – произведение ряда коэффициентов.
Кv =Кmv*Киv*Кпv .
Кmv=Кг
- коэффициент, учитывающий качество обрабатываемого материла.[1,стр.262]
Киv=1,0 – коэффициент, учитывающий качество материала инструмента.[1.стр.263]
Кпv=1,0 – коэффициент, отражающий состояние поверхности заготовки.[1.стр.263]
Таким образом
Кv =Кmv*Киv*Кпv=1,5*1*1,0=1,5.
Z=10, DMIN=60мм – параметры режущего инструмента
ВMIN=60мм – ширина фрезерования
Рассчитываем скорость :
 м/мин. м/мин.
При фрезерной обработке, где материал режущей части фрезы быстрорежущая сталь, для наименьшей скорости резания Vmin имеем:
 , где , где
СV=41, m=0.2, y=0.4, x=0.1, р=0, u=0.15, q=0.25 – коэффициент и показатели степени.[1,стр.262]
tMAX=3 мм – максимальный припуск.
SZMАХ=0,3 мм/зуб – максимальная подача.
Т=300 минут – стойкость.
Кv =Кmv*Киv*Кпv=1,0*1*1,0=1,0.
Z=26, DMАХ=250мм – параметры режущего инструмента
ВMАХ=0,75*250=200мм – ширина фрезерования
Рассчитываем скорость:
 м/мин. м/мин.
Проведём расчет составляющих сил резания по следующей формуле:
Для силы Рz , при материале режущей части резца – быстрорежущая сталь, имеем:
t=3 мм – припуск.
Sz=0,3 –подача, мм/зуб.
 – частота вращения шпинделя, об/мин. – частота вращения шпинделя, об/мин.
Ср=82,5, x=0,95, y=0.8, u=1.1, q=1.1, w=0
Кмр=
Z=26, D=250мм – параметры режущего инструмента
В=200мм – ширина фрезерования
Рассчитываем составляющую Рz :
 Н. Н.
2.3 Предварительное определение мощность электродвигателя главного движения
Предварительное определение мощность электродвигателя главного движения определяется по формуле
 , кВт , кВт
где  - полезная мощность резания - полезная мощность резания
 , кВт , кВт
где  - КПД цепи главного движения (для станков с вращательным главным движением - КПД цепи главного движения (для станков с вращательным главным движением  =0,7-0,85). =0,7-0,85).
КПД цепи подачи приближенно определим по формуле:
 , ,
где коэффициенты КПД для составных частей привода выбирается из таблицы 2.
Таблица 2 – Значения КПД передач и подшипников станков.
| Тип передачи или подшипника
|
КПД
|
| Плоскоременная передача
|
0,98
|
| Клиноременная передача
|
0,97
|
| Прямозубая цилиндрическая передача
|
0,99
|
| Непрямозубая цилиндрическая передача
|
0,965
|
| Коническая передача
|
0,97
|
| Червячная передача ( -угол подъема винтовой линии червяка; -угол подъема винтовой линии червяка;  =5+6° - угол трения в передаче) =5+6° - угол трения в передаче)
|

|
| Подшипники качения
|
0,997
|
| Подшипники скольжения
|
0,98
|
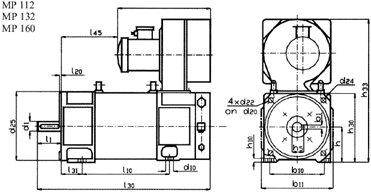
Выбираю электродвигатель постоянного тока модели MP112SL.
Таблица 3 - Технические параметры и габаритные размеры электродвигателя
| Технические параметры электродвигателя
|
| Тип двигателя
|
Номинальная мощность
|
Ном. частота вращения
|
Макс. частота вращения
|
Напряжение якоря
|
Ток якоря,
|
Напряжение возбуждения
|
Ток возбуждения
|
Момент инерции
|
Масса
|
| kW
|
мин-1
|
мин-1
|
V
|
A
|
V
|
A
|
kg.m2
|
kg
|
| MP112SL
|
7.5
|
1600
|
2000
|
400
|
22
|
180
|
1.5
|
0.050
|
86
|
| Габаритные размеры электродвигателя
|
| Тип двигателя
|
Габаритные размеры,мм
|
| h
|
h5
|
h10
|
h30
|
h33
|
l1
|
l10
|
l20
|
l30
|
l31
|
l45
|
d1
|
d10
|
d20
|
d22
|
d24
|
d25
|
b1
|
b10
|
b11
|
| MP112SL
|
112
|
35
|
11
|
227
|
472
|
80
|
355
|
4
|
650
|
70
|
208
|
32
|
12
|
215
|
15
|
250
|
180
|
10
|
190
|
234
|
3. Кинематический расчет привода станка
Определяем диапазон регулирования привода главного движения по формуле:
 . .
Определяем диапазон регулирования двигателя по формуле:
 . .
Определяем диапазон регулирования двигателя при постоянной мощности по формуле:
 . .
Определяем диапазон регулирования двигателя при постоянном моменте по формуле:
Определяем диапазон регулирования шпинделя при постоянной мощности по формуле:
Для обеспечения бесступенчатого регулирования частоты вращения шпинделя при постоянной мощности знаменатель ряда передаточных отношений передач коробки скоростей φ1 принимаю равным RдР. Требуемое число ступеней коробки скоростей:
 . .
4. Силовой расчет привода станка
Расчетный крутящий момент на любом валу привода главного движения станка равен:
 Н·м, Н·м,
где Nдв – номинальная мощность главного электродвигателя, кВт;
η – КПД механизма от вала электродвигателя до рассматриваемого вала;
n – частота вращения вала на предельных режимах резания, мин-1.
На первом валу
 Н·м, Н·м,
на втором валу
 Н·м, Н·м,
на третьем валу
 Н·м. Н·м.
5. Прочностной расчет передач приводов станков
5.1 Расчет на прочность стальных цилиндрических зубчатых передач
5.1.1 Проверочный расчет косозубой передачи
Исходные данные:
mn1,2=3, z1,2=56, 7-A, β = 8°, сталь 40Х, ТО - закалка ТВЧ.
Расчет косозубых передач станков ведется по формулам:
 мм; мм;
 мм; мм;
где  - нормальный модуль передачи в мм; - нормальный модуль передачи в мм;
А - межосевое расстояние передачи в мм;
 =1*1,15*1,3=1,5 =1*1,15*1,3=1,5
 =1*1,1*1,2=1,32 =1*1,1*1,2=1,32
 , принимаю , принимаю  =12, =12,
 коэффициенты неравномерности распределеняя нагрузки по дляне зуба; учитывают увеличение нагрузки на опасном участке контактной линии вследствие упругих деформации валов и подшипников и по грешно стай изготовления сопряженных колес, ведущих к взаимному перекосу контактирующих зубьев; коэффициенты неравномерности распределеняя нагрузки по дляне зуба; учитывают увеличение нагрузки на опасном участке контактной линии вследствие упругих деформации валов и подшипников и по грешно стай изготовления сопряженных колес, ведущих к взаимному перекосу контактирующих зубьев;
 - допускаемое напряжение на изгиб и контактную прочность а - допускаемое напряжение на изгиб и контактную прочность а  определяются по формулам: определяются по формулам:
 =1,9*108*1,2*1=2,28*108Па, =1,9*108*1,2*1=2,28*108Па,
 =9,5*108*1,4=13,3*108Па, =9,5*108*1,4=13,3*108Па,
где  Коэффициенты неравномерности распределения нагрузки- длительные пределы выносливости зубьев при расчете на изгиб и контактную прочность в Па; Коэффициенты неравномерности распределения нагрузки- длительные пределы выносливости зубьев при расчете на изгиб и контактную прочность в Па;
 - коэффициенты переменности режима работы, учитывающие благоприятное влияние переменного режима работы универсального станка на величину допускаемого напряжения, когда через рассчитываемую передачу не всегда передается полная мощность, что позволяет повысить допускаемые напряжения по сравнению с длительными пределами выносливости; - коэффициенты переменности режима работы, учитывающие благоприятное влияние переменного режима работы универсального станка на величину допускаемого напряжения, когда через рассчитываемую передачу не всегда передается полная мощность, что позволяет повысить допускаемые напряжения по сравнению с длительными пределами выносливости;
 - коэффициент формы зуба, определяемый по приведенному числу зубьев шестерни: - коэффициент формы зуба, определяемый по приведенному числу зубьев шестерни:
 =58 =58
 - угол наклона зубьев; - угол наклона зубьев;
 , принимаю , принимаю  ; ;
 - коэффициент угла наклона зубьев, учитывающий благоприятное влияние да прочность наклонного расположения контактной ликии, для - коэффициент угла наклона зубьев, учитывающий благоприятное влияние да прочность наклонного расположения контактной ликии, для  >30' >30' ; для ; для   определяется по формуле: определяется по формуле:
 =0,93 =0,93
 - коэффициент уменьшения суммарной длина контактных линий (принимаю - коэффициент уменьшения суммарной длина контактных линий (принимаю  ); );
 - коэффициент перекрытия в торцояом свечении. Опоеделяется по формуле: - коэффициент перекрытия в торцояом свечении. Опоеделяется по формуле:
 = = 1,74 1,74
 - соответственно, числа зубьев шестерни и колеса; - соответственно, числа зубьев шестерни и колеса;
“+”- для наружного зацепления;
“-”-.для внутреннего зацепления;
 - коэффициент, учитывающий неравномерность распределения нагрузки по длине контактных линий вследствие неодинаковой удельной жесткости контактирующей пары зубьев. - коэффициент, учитывающий неравномерность распределения нагрузки по длине контактных линий вследствие неодинаковой удельной жесткости контактирующей пары зубьев.
Расчет косозубой передачи выполняется в следующем порядке.
Определяют нормальный модуль 
 = = мм мм
и округляют его до стандартного значения  =2,5. Рассчитывают межосевое расстояние А =2,5. Рассчитывают межосевое расстояние А
 = =
и сравнивают его с подсчитанным по формуле:
 = = ≈142 мм. ≈142 мм.
где  - сумма зубьев колес пары. - сумма зубьев колес пары.
142>70 - условие  выполняется. выполняется.
5.1.2 Проверочный расчет конической передачи
Исходные данные:
mte1,2=4, z1,2=35, 7-A, δ=45ْ , β = 25°, сталь 40Х, ТО - закалка ТВЧ.
Проверочный расчет на изгибную прочность
 , ,
где
 Н, Н,
dm=mmn·z=3,1*35=109мм,
mmn=mte·(1-0.5 )·cosβ=4(1- )·cosβ=4(1- )·cos25ْ=3,1 мм, )·cos25ْ=3,1 мм,
KF= KFβ· KFV=1·1,4=1,4,
KH= KHβ· KHV=1,05·1,2=1,26,
KFβ=1+( KHβ - 1)·1.5=1+(1-1)·1.5=1,
Zv= . .
В зависимости от Zv выбираю уF=3,75. Тогда
  МПа<[ МПа<[ ]=2.28·108МПа ]=2.28·108МПа
– условие изгибной прочности выполняется.
Проверочный расчет на контактные напряжения

МПа<[ ]=13,3·108МПа ]=13,3·108МПа
Прочностной расчет конической передачи проведен успешно.
5.2 Расчет клиноременной передачи
Исходные данные:
P1=7,5 кВт, n=1600об/мин, i≈1.
В зависимости от n выбираем сечение ремня Б, ремень армирован стальным кордом.
Принимаю dшк=200 мм,P0≈5.5 кВт.
Пусть а≈500мм. Тогда lp=2·500+0.5·π·(200+200)=1628 мм. Принимаю lp=1600 мм.
Уточняем межосевое
 мм. мм.
Ср=1,2, Сi=1, Cl=0,92, Cα=1.
Pp=P0Сi Cl Cα/ Ср=5,5·1·0,92·1/1,2=4,22 кВт.
6) Число ремней z=7.5/4.22≈2 ремня.
Находим предварительное натяжение одного ремня при
v=πdшкn/60=3.14·0.2·1600/60=16.75м/с и Fv=1250·138·10-6·16.752=48.4H равно
F0=0.85PCpCl/(zvCαCi)+Fv=0.85·7.5·103·1.2·0.92/(2·16.75·1)+48.4=189H
Сила, действующая на вал
F=2F0z=2·189·2=756H.
Ресурс наработки
Т=ТсрК1К2=2000·2,5·1=5000ч.
6. Определение параметров валов
6.1 Приближенный расчет валов
Для материала валов принимаем сталь 45, улучшение , для которой [τк] =20 МПа.
dI= мм , dII= мм , dII= мм, dIII= мм, dIII= мм. мм.
6.2 Уточненный расчет валов
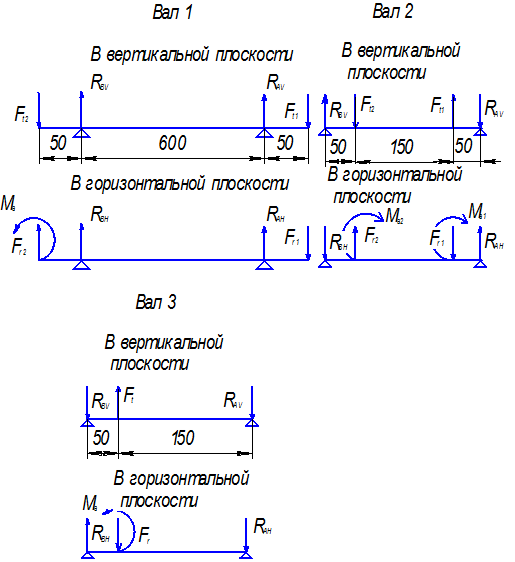
Рис.2 – Схемы нагружения валов.
Составляя уравнения моментов для второго и третьего вала находим реакции опор:
для 2-го вала:
RAV=22290H, RBV=15908H, RAH=9570H, RBH=10458H,
суммарная RA=24621H, RB=18565H.
для 3-го вала:
RAV=21866H, RBV=3644H, RAH=774H, RBH=10150H,
суммарная RA=3725H, RB=24106H.
Уточненный расчет выполняем для первого вала, так как он является наиболее нагруженным.
Для проверочного расчета строим эпюру нагружения этого вала.
Определяем окружную силу в зацеплении по формуле:
Для зубчатого конического колеса:
 H. H.
Определяем радиальную силу:
Fr2=Ft2×tgα×cosd1=11197H.
Определяем осевую силу:
Fa=Fr2×cosb=5221H, Ma= H. H.
Для шкива:
Ft1=25000Н,Fr1=756Н.
Рассмотрим данную расчетную схему вала в двух плоскостях: горизонтальной и вертикальной, в которых действуют радиальная и окружная силы. Через уравнения моментов относит. опорных точек находим реакции опор.
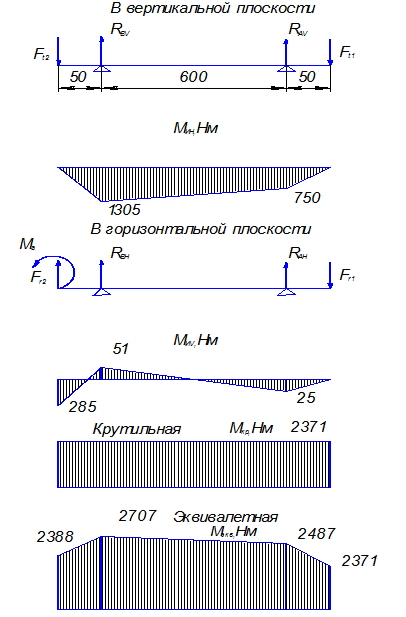
Рис.3 – Эпюры изгибающих элементов.
В вертикальной плоскости:
RAV=14445H, RBV=44430H.
В горизонтальной плоскости:
RAH=879H, RBH=11320H.
Суммарные реакции:
RA=45849H, RB=14472H.
Максимальный эквивалентный момент:
Мэмах=2707 Н×м.
6.3 Расчет вала на усталость
Усталостный расчет вала выполняется как проверочный. Он заключается в определении расчетных коэффициентов запаса прочности в предположительно опасных сечениях.
При расчете принимаем, что напряжения изгиба изменяются по симметричному циклу, а напряжения кручения – по отнулевому циклу.
Амплитудные значения напряжений изгиба и кручения определяются по формулам:

где Мизг, Мкр – изгибающий и крутящий момент в сечении;

Коэффициенты запаса усталостной прочности определяются по формуле:
по нормальным напряжениям

по касательным напряжениям
гдеs-1, t-1 – пределы выносливости для стали 40Х:
s-1 = 370 МПа, t-1 = 215 МПа;
es, et - коэффициенты, учитывающие влияние абсолютных размеров вала, определяются по таблице 15 [5, с. 11], es = et = 0,75;
Кd, КF – коэффициенты концентрации напряжений при изгибе и
кручении с учетом влияния шероховатости поверхности
Кd=0,5; КF=1;
Ks - коэффициент упрочнения поверхности, Ks = 2,5 – при улучшении;
sа, tа – напряжения изгиба и кручения;
ys, yt - коэффициенты, характеризующие чувствительность материала к асимметрии цикла напряжений, определяется по таблице 9 [5, с. 11],
ys = 0,05, yt = 0;
sm = 0;
tm = tа.
Определяем St:
Общий запас прочности определяется по формуле:
S= 
S≥[S]=1.5…2.5, т. е. условие выполняется.
6.4 Выбор элементов передающих крутящий момент
Для все соединений со шкивами назначаем шпоночное соединение, а для все остальных соединений ринимаем шлицевое соединение, которое имеет следующие размеры рабочих частей :
 , b=12, dlmin=67,4, ¦=0,8, rmax=0,5. , b=12, dlmin=67,4, ¦=0,8, rmax=0,5.
Шлицевое соединение подлежит проверке на смятие, которая проводится по формуле:


Остальные соединения выполняются по Мкр, меньшего от момента на шкиву.
Все выбранные шлицевые соединения соответствуют условию прочности при проверке на смятие.
Соединение со шкивами.
Проверим выбранные шпонки на смятие:
 ; ;
где  - крутящий момент, который передается шпонкой, Нм; - крутящий момент, который передается шпонкой, Нм;
 - диаметр вала, мм; - диаметр вала, мм;
 - высота шпонки, мм; - высота шпонки, мм;
 - рабочая длина шпонки, мм; - рабочая длина шпонки, мм;
 - напряжение, которое допускается, принимаем стандартные шпонки [3 с.62, табл. 7.1]. - напряжение, которое допускается, принимаем стандартные шпонки [3 с.62, табл. 7.1].
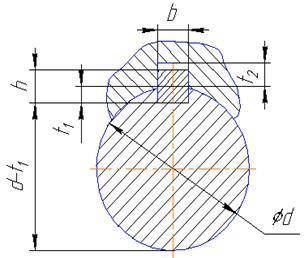
Рисунок 5 Размеры шпоночного соединения.
| d, мм
|
lр, мм
|
T, Нм
|
[σсм], МПа
|
σсм, МПа
|
количество:
|
b, мм
|
h, мм
|
t1, мм
|
t2, мм
|
| 36
|
45
|
2371
|
100
|
89,89
|
1
|
10
|
8
|
5,5
|
5
|
| 80
|
55
|
2371
|
100
|
92,86
|
1
|
10
|
8
|
5,5
|
5
|
 . .
Остальные соединения выполняются по Мкр, меньшего от момента на шкиву.
Все выбранные шлицевые соединения соответствуют условию прочности при проверке на смятие.
7 Выбор подшипников
Учитывая элементы, расположенные на валах, а также по диаметрам шипов, выбираем подшипники, параметры которых сносим в таблицу 8.
Таблица 4 – Параметры подшипников.
| Подшипник
|
внутренний диаметр d, мм
|
наружный диаметр D, мм
|
ширина кольца B, мм
|
статическая грузоподъемностьC0,кН
|
| 418
|
90
|
210
|
52
|
174
|
| 266418
|
90
|
225
|
108
|
337
|
| 246315
|
75
|
160
|
74
|
212
|
| 46315
|
75
|
160
|
37
|
131
|
| 246418
|
90
|
225
|
108
|
337
|
Проверочный расчет подшипников.
Фактическая долговечность подшипника  в часах. в часах.
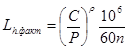 ; ;
где С – динамическая грузоподьемность, кН.
Р – приведенная грузоподьемность, кН.
r - коэфициент формы тел качения,  - для шариковых подшипников, - для шариковых подшипников,  - для роликовых подшипников. - для роликовых подшипников.
Приведенную грузоподьемность:
 Н; Н;
де V – „коэфициент кольца”: V=1 при вращении внутреннего кольца, V=1,2 при при вращении наружного кольца;
R, A – радиальная и осевая нагрузка на подшипник;
X, Y – коэфициенты приведения R, A; Х=1. [3 с. 68 табл.8.4]
 - коэфициент безопасности, зависит от вида работы и серьезность последствий аварии. [3 с.65 табл. 8.1]. - коэфициент безопасности, зависит от вида работы и серьезность последствий аварии. [3 с.65 табл. 8.1].
 - коэфициент температурного режима. [3 с.65 табл. 8.2]. - коэфициент температурного режима. [3 с.65 табл. 8.2].
 - временная нагрузка до - временная нагрузка до  . .
- при  . .
На первом валу:
- для радиального шарикоподшипника 418:
 21000 Н, 21000 Н,
 . .
- для сдвоенного радильно-упорного подшипника 266418:
 ; ;
 . .
На втором валу:
- для сдвоенного радильно-упорного подшипника 246315:
 ; ;
 ; ;
- для радильно-упорного подшипника 46315:
 ; ;
 . .
На третьем валу:
- для радильно-упорного подшипника 46315:

 . .
 . Т.к. . Т.к.  часов то условие долговечности выполняется. часов то условие долговечности выполняется.
8 Расчет динамических характеристик привода главного движения
Задачи расчета.
Привод подачи станка при обработке детали нагружен крутящим моментом, который вследствие особенностей кинематики процесса резания, переменности припуска на детали и физико-механических свойств ее материала изменяется во времени. В результате в нем возникают крутильные колебания, обусловливающие динамические нагрузки, появление изгибных колебаний, снижение производительности обработки, уменьшение долговечности станка, а в некоторых случаях и потерю устойчивости его динамической системы. С целью обеспечения требуемого качества станка динамические характеристики привода рассчитывают при его проектировании и производят корректировку конструкции.
Составление расчетной схемы привода. Представим, что конструкция привода разработана в соответствии с кинематической схемой. Необходимо произвести его динамический расчет и анализ.
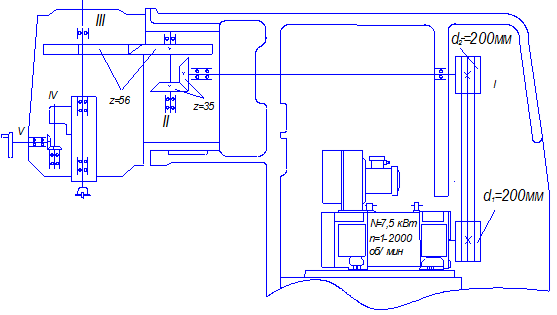
Рис. 6 - Кинематическая схема привода главного движения для динамического расчета.
Определяем моменты инерции всех вращающихся элементов привода. Момент инерции (кг×м2) детали, являющейся сплошным телом вращения, определяется по зависимости
где r — плотность материала детали, кг/м3; d и l - диаметр и длина детали, м.
Детали длиной до 1,5—2 их диаметра принимают в качестве сосредоточенных масс. В рассматриваемой конструкции это ротор электродвигателя, шкивы, блоки зубчатых колес, муфты.
Валы являются распределенными массами. При длине вала до 300 мм к моментам инерции находящихся на нем сосредоточенных масс присоединяют треть момента инерции вала.
Моменты инерции муфт и шкивов рассчитаем как зубчатых колес:

где d, D – радиус вершин и радиус впадин зубчатого колеса;
h – ширина ступицы или зубчатого венца.
Все вычисленные моменты инерции заносим в таблицу 10.
Таблица 10 - Моменты инерции элементов привода подач.
| Наименование элемента
|
Момент инерции элемента I, кг×м2
|
| Ротор электродвигателя
|
0,05
|
| Шкив I, II
|
0,72
|
| Вал I
|
0,024
|
| Вал II
|
0,0084
|
| Вал III
|
0,012
|
| Зубчатое колесо (вал – I, z=35)
|
0,0015
|
| Зубчатое колесо (вал – II, z=35)
|
0,0015
|
| Зубчатое колесо (вал – II, z=56)
|
0,12
|
| Зубчатое колесо (вал – III, z=56)
|
0, 12
|
Находим крутильную податливость элементов приводов. Зубчатые муфты и муфты фрикционного действия не учитываются. Крутильная податливость ременной передачи связана с расчетной длиной ветви между шкивами:

где L - межосевое расстояние, м; D1 и D2 —диаметры шкивов, м; V — скорость ремня, м/с;
Податливость ременной передачи:
k - коэффициент, учитывающий условия работы передачи: к = 1, когда окружная сила Р вдвое больше силы предварительного натяжения Р0, к = 2 при Р < 2Ра; Е — модуль упругости ремня, МПа (модуль упрутости зубчатых ремней со стальным кордом, клиновых ремней со шнуровым кордом плоских полимерных ремней соответственно равен 6000...35000МПа, 600...800,2200...3800 МПа); F - площадь поперечного сечения ремня, м2.
Крутильную податливость для сплошных валов:

где G – модуль упругости второго рода (8×1010 МПа), D – диаметр вала.
Крутильную податливость для шлицевых валов:

где d – внутренний диаметр шлицев; l – расчетная длина, путем использования которой учитывается неравномерность распределения крутящего момента вдоль ступицы зубчатого колеса, насаженного на шлицевый вал с зазором:

с натягом:

Крутильная податливость зубчатой передачи обусловливается не только изгибом и контактной деформацией ее зубьев, но и дополнительным поворотом колес, который является следствием деформации опор и изгиба валов.
Составляющая крутильной податливости пары зубчатых колес, обусловленная изгибной и контактной деформацией их зубьев,
где k - коэффициент, для прямозубых колес равный 6, для косозубых — 3,6; a - угол зацепления передачи, b – ширина зубчатого венца, d – делительный диаметр.
Деформация опоры вала слагается из упругой деформации подшипника качения к деформации стыков между поверхностями внутреннего кольца подшипника и вала, а также наружного кольца и отверстия в корпусе.
Деформация шарикового подшипника (м):

где. d. - внутренний диаметр подшипника, м; Р — нагрузка на опору, Н.
Суммарная деформация стыков между поверхностями колец подшипника, вала и корпуса:
где b, D — ширина и наружный диаметр подшипника, м.
Вектор перемещения k-го зубчатого колеса, обусловленного деформацией опор вала,

Перемещения dk и dk+1 обусловлены суммарными прогибами yk и yk+1 валов в сечениях, где расположены зубчатые колеса:
 , , 
где Dk и Dk+1 перемещения зубчатых колес передачи, вызванные деформациями опор валов.
Вектор относительного перемещения зубчатых колес передачи:

Крутильная податливость зубчатой передачи (рад/Н×м), вызванная изгибом валов и деформацией опор и приведенная к k- тому колесу:

где Yк – угол поворота зубчатых колес передачи, M – крутящий момент Нм, dt и dr – тангенциальная и радиальная составляющие относительного перемещения пары зубчатых колес.
Все рассчитанные крутильные податливости заносим в таблицу 11.
Таблица 5 - Крутильная податливость элементов привода.
| Наименование элемента
|
Крутильная податливость e, рад/Нм
|
| Ременная передача(l=1600мм)
|
0,0077
|
| Вал I(=0,7м)
|
3,32×10-6
|
| Вал II(l=0,250м)
|
1,2×10-6
|
| Вал III(l=0,350м)
|
1,65×10-6
|
| Зубчатая передача 35/35(e¢+e¢¢)
|
0,031
|
| Зубчатая передача 56/56(e¢+e¢¢)
|
0,026
|
| Подшипник 418
|
0,056
|
| Подшипники 266318 (2)
|
0,016
|
| Подшипник 46315
|
0,0126
|
| Подшипник 246318
|
0,01559
|
Многоступенчатую расчетную схему заменяют линейной. При этом моменты инерции вращающихся масс, податливости приводят к одному валу, обычно к валу электродвигателя:
 , , 
где ( к — передаточное отношение передач от вала I к валу с номером k+1)
Если частота возмущающих воздействий не больше максимальной частоты вращения элементов привода, высшими собственными частотами колебаний системы можно пренебречь и упростить ее, сведя к двухмассовой, имеющей две или три собственные частоты. Методика этого преобразования следующая.
Систему с n степенями свободы разбивают на  парциальных систем, среди которых выделяют системы первого типа с номерами l, равными 1,3,5,...,m - 1, и второго типа с номерами 2,4,6,..., m. парциальных систем, среди которых выделяют системы первого типа с номерами l, равными 1,3,5,...,m - 1, и второго типа с номерами 2,4,6,..., m.
Квадраты собственных частот второго типа:
 , 1/рад , 1/рад
 1/рад. 1/рад.
Смазочная система станка служит для подачи смазочного материала ко всем трущимся поверхностям.
Существует несколько схем подвода смазочного материала к трущимся поверхностям.
9 Определение системы смазки
Индивидуальная схема служит для подвода смазочного материала к одной смазочной точке, централизованная к нескольким точкам.
В нераздельной схеме нагнетательное устройство присоединено к смазочной точке постоянно, в раздельной оно подключается только на время подачи смазочного материала.
В проточной системе жидкий или пластичный материал используется один раз.
В циркуляционной системе жидкий материал подается повторно.
В системах дроссельного дозирования объем смазочного материала, подаваемого к смазочной точке регулируется дросселем.
В системах объемного дозирования могут регулироваться не только доза, но и частота подачи.
В комбинированных системах могут быть предусмотрены объемное и дроссельное регулирование одно- и двухматериальные питатели.
Системы с жидким смазочным материалом в зависимости от способа его подачи к поверхностям трения могут быть разбрызгивающими, струйными, капельными, аэрозольными.
Для модернизированного узла выбираю местную импульсно-циркуляционную смазку контактирующих поверхностей.
Заключение
В результате проделанной работы был произведена модернизация привода главного движения вертикально-фрезерного станка модели 6С12, выбор и расчет параметров отдельных ее элементов: подшипников качения, служащих опорами валов и зубчатых колес. Были разработаны компоновочная схема и чертеж привода с указанием его основных элементов.
В приложении А пояснительной записки выполнен чертеж общего вида вертикально-фрезерного станка модели 6С12, где указаны его основные элементы и габаритные размеры, а также показана кинематическая схема привода.
В приложении Б пояснительной записки выполнен сборочный чертеж привода главного движения, где указаны его основные элементы и габаритные размеры, а также показана кинематическая схема привода.
Список использованной литературы
1. Справочник технолога-машиностроителя. В 2-х т. Т. 2/Под ред. А. Г. Косиловой и Р. К. Мещерякова. – М.: Машиностроение, 1985. 496 с.
2. Кочергин И. А. Конструирование и расчет металлорежущих станков и станочных комплексов. Курсовое проектирование: Учеб. Пособие для вузов. – Мн.: Выш. шк., 1991. – 382 с.
3. Методичні вказівки до виконання курсового проекту з деталей машин. ”Вибір електродвигуна та визначення вихідних даних для розрахунку приводу”. Автори: Оніщенко В. П., Ісадченко В. С., Недосекін В. Б., - Донецьк: ДонНТУ,2005. – 36 стор.
4. Методичні вказівки до виконання курсового проекту з деталей машин. Розділ 3. Проектування валів та їх опор на підшипниках кочення/ Автори: О. В. Деркач, О. В. Лукінов, В. Б. Недосєкін, Проскуряков С. В. – Донецьк: ДонНТУ,2005. – 106 с.
5. Детали и механизмы металлорежущих станков. Под ред. Д. Н. Решетова. Т. 2 М., «Машиностроение», 1972, стр. 520.
6. Методичні вказівки докурсового проекту з деталей машин Розділ 2,3. (для студентів напрямку «Інженерна механіка»). Автори: В.С. Ісадченко,П.М. Матеко, В.О. Голдобін, – Донецк: ДонНТУ, 2005 г. – 36 с.
7. М.Н. Иванов «Детали машин». – М.:Высш.шк.,1991. – 383с.:ил.
8. Металлорежущие станки .Под ред. В.Э.Пуша. – М.:Машиностроение, 1985.
|