|
1. Введение
2. Техническое задание
2.1 Общие требования
2.2 Назначение и цели создания системы
2.3 Характеристика объекта управления
2.4 Требования к системе управления
2.5 Состав и содержание работ по созданию системы
2.6 Порядок контроля и приемки системы
2.7 Источники разработки
3. Обоснование и выбор структурной схемы
4. Обоснование и выбор функциональной схемы
4.1 Обоснование и выбор двигателя
4.2 Обоснование и выбор усилителя мощности
4.3 Обоснование и выбор датчика угловой скорости
4.4 Обоснование и выбор преобразователя для датчика угловой скорости
4.5 Обоснование и выбор датчика расстояния
4.6 Обоснование и выбор схемы вычитания
4.7 Обоснование и выбор схемы суммирования
4.8 Обоснование и выбор регулятора
Приложение А. Функциональная схема разрабатываемой системы
Приложение Б. Электрическая схема разрабатываемой системы
Список литературы
1.
Введение
Человек всегда стремился облегчить себе жизнь. В повседневной жизни, в учебе, в работе и производстве. С развитием науки появилась робототехника, прежде всего промышленная. Активное внедрение роботов в промышленность позволило практически исключить участие человека в производственных процессах. Это позволяло резко снизить трудоемкость процесса и освободить человека от монотонных и вредных условий труда. Так что же такое робот? К роботам относят машины, обладающие несколькими степенями подвижности. Роботов условно подразделяют на:
1. Мобильные роботы – роботы, основным функциональным назначением которых является имитация двигательных функций ног человека. Перемещение такого робота производится по неопределенной, неограниченной траектории.
2. Подвижные (передвижные) роботы – любая движущаяся манипуляционная система, перемещение которой происходит по определенной, заранее проложенной, ограниченной траектории
3. Робокары – безрельсовые напольные транспортные средства без водителя. Как правило, они предназначены для автоматической подачи заготовок, деталей в пределах технологической системы. Часто робокары называют «автоматической транспортной тележкой»
Как видно из классификации, приведенной выше, существует достаточно большое количество роботизированных систем. И в наше время использование роботов далеко не ограничивается лишь производственными циклами. Существует множество ситуаций, в которых применение роботизированных систем является более предпочтительным, чем труд человека. К ним можно отнести ликвидацию различных техногенных катастроф, где повышенный радиационный фон исключает возможность работы человека. Сюда же относят работу с токсичными веществами, подводные работы на большой глубине. Не стоит забывать и о космическом применении роботов для исследования удаленных небесных тел, длительных полетов. Также, в наше время роботы нашли свое применение в антитеррористической деятельности – осмотр и разминирование подозрительных объектов выполняется роботом, не подвергая риску жизнь человека. Иными словами, сфера применения роботизированных систем очень велика.
Это требует от системы управления роботом выполнения сложного комплекса задач:
· управление движением - обеспечение движения робота в целом, контроль работы отдельных механизмов и приборов;
· навигация - определение местоположения робота в пространстве (вычисление текущих абсолютных координат);
· планирование движения - задание маршрута движения и необходимых маневров робота, коррекция траектории движения и контроля точности выполнения движения;
· поддержание связи – поддержание канала связи между бортовыми компьютерами и стационарными управляющими компьютерами, установленными на определенном удалении от робота;
· обеспечение технического зрения - распознавание различных объектов на пути следования робота, в том числе преодолимых и непреодолимых препятствий;
Следует помнить, что при аппаратной реализации системы управления необходимо добиваться быстродействия, необходимого для решения поставленных задач в реальном времени, с одной стороны, и стремиться к надежной, компактной, экономной в потреблении энергии системе с другой стороны.
В рамках предложенного курсового проекта предлагается разработать устройство относится к классу мобильных роботов. Предназначено для выполнения работ по разведке в космической среде, на поверхности космического тела (именуемого далее – астероид).
Моей частью работы при проектировании данного базового робототехнического комплекса робота-лунохода является создание системы управления 6-тистепенным манипулятором.
На пути движения робота могут быть различные преграды. Преодоление части преград осуществляется при помощи шасси, часть преград можно устранить при помощи установленного на роботе манипулятора. Также манипулятор может применяться для проведения различных исследовательских процессов.
Согласно техническому заданию манипулятор и система управления должны выполнять работы в условиях космоса, что накладывает довольно жесткие ограничения на элементную базу.
По техническому заданию требуется разработать систему управления данным манипулятором.
2.
Техническое задание на разработку СУ
2.1 Общие требования
Полное наименование системы: “Система автоматического управления манипулятором робота-лунохода”.
Система создается на основании статей и Internet сайтов, а так же литературы указанной в перечне. Результаты проделанной работы по созданию системы (её частей), оформляется в качестве курсовой работы по предмету «Технология проектирования и производства автоматизированных систем».
2.2
Назначение и цели создания системы
Назначение системы. Разрабатываемая система управления манипулятора робота-лунохода (именуемая в дальнейшем – система) относится к классу бортовых систем и предназначена для автоматизации процесса проведения необходимых исследований на поверхности астероида в космических условиях. Данную систему можно использовать для управления манипуляторами в робототехнике и в других областях, где необходимо обеспечить подобные манипуляции (радиационные условия, антитеррористические акции). Объекты управления: приводы управления звеньев манипулятора. Цели создания системы. Целью курсового проекта по созданию системы является приобретение навыков разработки конструкторской документации на конкурентно способное изделие, реализация которого ориентирована на рынок.
2.3
Характеристика объекта управления
Система должна обеспечивать управление положением «руки» робота в автоматическом режиме. Манипулятор должен работать в космической среде.
2.4
Требования к системе управления
Требования к системе в целом. Система управления должна обеспечивать управление положением тележки разрабатываемой модели.
Требования безопасности:
- требований к электробезопасности не предъявляются;
- должна быть обеспечена пожаробезопасность.
Требования к эргономике и технической эстетике.
Система должна удовлетворять современным требованиям технической эстетики.
Требования к эксплуатации, техническому обслуживанию, ремонту и хранению системы:
- эксплуатация системы должна осуществляться автономно после включения;
- предусмотреть возможность проведения ежегодных регламентных работ при прохождении периодического технического осмотра;
- ремонт системы в условиях специализированной мастерской ;
- хранение в соответствие с ГОСТ 15150-80.
Требования по сохранности информации при авариях: вся данные при авариях, потере питания должны сохраняться на информационные носители.
Требования к защите от влияния внешних воздействий:
Система должна функционировать в условиях воздействия радиопомех, электрических, магнитных и электромагнитных полей создаваемых космическими объектами.
Требования к аппаратуре системы управления с точки зрения воздействия на смежные системы:
Система не должна шуметь, не излучать и т.д.
Патентно-правовые требования:
Патентная чистота системы и её частей должна быть обеспечена в отношении стран Евросоюза, США, Японии и России.
Требования технологичности, стандартизации и унификации:
Разработка КД системы должна проводиться в соответствие с требованиями нормативно-технических документов, устанавливающих степень использования стандартных, унифицированных методов реализации функций (задач) системы, поставляемых программных средств, типовых математических методов и моделей, типовых проектных решений и т.п. (курс – “Конструирование и технология производства аппаратуры СУ”).
Дополнительные требования:
- Требования к упаковке, маркировке, транспортированию и хранению,
- Требования к конструкторской, эксплуатационной и ремонтной документации;
- Комплектность ЗИП, специнструмент и приспособления;
- Экономические показатели и др.
- Данные требования в рамках данного курсового проекта не рассматриваются.
Требования к видам обеспечения:
В пояснительной записке к курсовому проекту должны быть приведены:
- в рамках математического обеспечения системы формулы и алгоритмы законов управления системы;
- в рамках технического обеспечения система должна строиться на отечественной элементной базе и только в технически обоснованном случае допускается применение зарубежной элементной базы;
2.5 Состав и содержание работ по созданию системы:
В процессе выполнения курсовой работы (в течение 11-го семестра) должны быть разработаны: структурная, функциональная и электрическая схема системы.
2.6 Порядок контроля и приёмки системы:
Защита курсовой работы проводится в конце 11-го семестра.
Требования к документации:
Материалы курсовой работы должны быть оформлены в соответствие с требованиями к курсовой работе по курсу "Проектирование аппаратуры СУ"
2.7 Источники разработки:
Конспекты лекций по ТАУ и ЦСУ, метрологии, схемотехнике, микропроцессоры и программирование, надежности, передача данных, автоматизированное проектирование систем и средств управления, фонд библиотеки МФ ЮурГУ и информационных сайтов системы Internet.
3 Обоснование и выбор структурной схемы
Схема структурная электрическая предназначена для более глубокого изучения внутреннего строения системы, а так же позволяет найти место для дополнительных связей и улучшения качества изделия.
В соответствии с требованиями технического задания манипулятор должен перемещаться в космической среде.
На современном этапе развития вычислительной техники наиболее целесообразным будет строить систему управления на основе микроконтроллеров, т.к. цифровые элементы системы не имеют изменения характеристик от температуры, времени и т.п. К тому же современные микроконтроллеры обладают широкими возможностями для использования периферийного оборудования.
По техническому заданию требуется осуществлять связь по последовательному интерфейсу RS-485, следовательно, нам необходим формирователь протокола обмена по этому интерфейсу. Необходимо устройство, которое будет принимать команды по этому интерфейсу в соответствии с разработанным протоколом, и передавать текущее состояние манипулятора.
Т.к. манипулятор имеет 6 степеней свободы, то и контуров управления соответствующее число, плюс схват. Особенность контура управления схватом в том, что он не имеет обратной связи.
Для управления приводами и схватом необходимы усилители.
Для отслеживания текущего состояния манипулятора необходимы 6 датчиков углов, а также по трем осям требуется ввести обратную связь по скорости, для этого нужно еще 3 датчика скорости.
Для применения показаний датчиков в контурах управления необходима установка преобразователей и, возможно, усилителей, если сигнал слишком слабый.
Общую структурную схему системы управления можно представить в следующем виде:

Рис.1. Структурная схема системы управления в общем виде
Команды и данные, принятые от пульта оператора поступают на формирователь протокола обмена, где происходит проверка принятой информации на наличие ошибок, дешифрация команд и выделение из принятого пакета данных. Это же устройство должно формировать ответный пакет с данными, полученными от датчиков электромеханической системы. Наиболее рационально реализовать такое устройство программно.
Далее блок управления принимает решение о возможности выполнения принятых команд на основе информации о текущем состоянии электромеханической системы. Также он предоставляет данные о текущем состоянии манипулятора для формирователя протокола обмена которыми он заполняет ответный пакет данных для пульта оператора.
Контуры управления двигателями предназначены для создания заданного момента на двигателях при помощи усилителей, а управление усилителями происходит с помощью блока широтно-импульсной модуляции (ШИМ).
Обратная связь реализована через систему очувствления, включающую в себя датчики и преобразователи сигнала. Основные контура управления замкнуты на пульт оператора через формирователь протокола обмена, а дополнительные контуры управления по скорости на основании, плече и локте замкнуты на блок управления, который и рассчитывает необходимые управляющие воздействия.
Объектом управления является непосредственно манипулятор с шестью степенями свободы и схватом.
Контроль текущего состояния объекта осуществляется при помощи системы датчиков. Т.к. манипулятор имеет шесть степеней свободы, то нам необходимо шесть датчиков углов, а для реализации дополнительной обратной связи по скорости в 3 степенях нам необходимо дополнительно установить датчики скорости.
Таким образом, в системе управления будет 2 типа контуров управления приводами, один с обратной связью по скорости, второй без нее. Оба типа замкнуты через пульт оператора. Их структурные схемы приведены на Рис. 2 и Рис. 3.

Рис.
2. Структурная схема контура с обратной связью по скорости

Рис.
3. Структурная схема контура без обратной связи по скорости
Т.к. в контурах управления без обратной связи по скорости нет датчиков скорости, но имеется необходимость предотвращения перегрузок двигатели при, например, стопоре, то можно применить программное дифференцирование угла, для получения текущей скорости и сравнивать ее с заданным регулятором значением.
Контур управления схватом обратной связи не имеет, поэтому на схват не требуется установка датчиков.
Таким образом, структурная схема системы управления шестистепенным манипулятором примет вид, представленный на рисунке 4.

Рис. 4. Структурная схема системы управления схватом
4.
Обоснование и выбор функциональной схемы
4.1 Обоснование и выбор двигателя
В соответствии с ТЗ выбираемый двигатель должен обладать следующими характеристиками:
1. Ток якоря электродвигателя на валу при максимальной нагрузке не должен превышать 10А;
2. Двигатель должен запитываться от одной аккумуляторной батареи 12В.
Двигатель – это электромеханический преобразователь, в котором осуществляется преобразование электрической энергии в механическую. В зависимости от рода потребляемого или отдаваемого в сеть тока двигатели подразделяются на двигатели переменного и постоянного тока. Двигатели переменного тока в свою очередь делятся на синхронные, асинхронные и коллекторные.
В синхронных двигателях поле возбуждения создается обмоткой, расположенной на роторе, которая питается постоянным током. Обмотка статора соединена с сетью переменного тока. В обычном исполнении вращающийся ротор с обмоткой возбуждения располагается внутри статора, а статор неподвижен. Управление синхронными двигателями осуществляется путем изменения частоты питающего напряжения, что недопустимо для нас. Синхронные двигатели также характеризуются большими угловыми скоростями и маленькими моментами. Поэтому часто такие двигатели используются в гироскопах.
В асинхронных двигателях специальная обмотка возбуждения отсутствует, рабочий поток создается реактивной составляющей тока обмотки статора. Этим объясняется простота конструкции и обслуживания асинхронных двигателей, так как отсутствуют скользящие контакты (щеточно-коллекторный узел) для подвода тока к вращающейся обмотке возбуждения и отпадает необходимость в дополнительном источнике постоянного тока для возбуждения двигателя. Недостатком является невозможность управления таким двигателем.
Среди коллекторных двигателей переменного тока получили распространение в основном однофазные двигатели малой мощности. Они находят применение в приводах, к которым подвод трехфазного или постоянного тока затруднен или нецелесообразен (в электрифицированном инструменте, бытовой технике и т. п.).
Использование двигателей переменного тока неприменимо для нашей системы, питающейся от аккумуляторов, т.к. для их использования придется устанавливать преобразователь постоянного напряжения в переменное.
Поэтому рассмотрим двигатели постоянного тока. Большинство двигателей постоянного тока — это коллекторные двигатели. Они выпускаются мощностью от долей ватта до нескольких тысяч киловатт. Обмотки возбуждения двигателей постоянного тока располагаются на главных полюсах, закрепленных на станине. Выводы секций обмотки ротора (якоря) впаяны в пластины коллектора.
Одна обмотка коллекторного двигателя постоянного тока представлена ниже:

Рисунок 5. Вид одной обмотки коллекторного двигателя постоянного тока
Ток, протекая по обмотке, находящейся в магнитном поле, наводит в ней ЭДС, которая старается провернуть рамку. Направление этой силы определяется по правилу правой руки. Чтобы во внешней цепи ток протекал в одном направлении, он должен быть выпрямлен. Для этого служит специальный электромеханический выпрямитель – коллектор, расположенный на валу машины. В простейшем случае используют две пластины с наложенными на них щетками. Последние так должны быть расположены в пространстве, чтобы коммутация происходила в моменты периода ЭДС через ноль. С увеличением количества рамок (секций) и соответственно пластин коллектора пульсации уменьшаются. При восьми коллекторных пластинах пульсация напряжения на щетках не превышает 1% от среднего, поэтому ток, протекающий во внешней цепи, можно считать практически постоянным.
Коллекторный двигатель постоянного тока обычно управляется при помощи Н-моста, позволяющего задавать направление вращения:

Рисунок 6. Н-мост
Для того, чтобы двигатель вращался вперед ключи Sa
1 и Sa
2, обозначенные на рисунке, должны быть замкнуты. Если необходимо вращение в обратную сторону, что замыкаются ключи Sb
1 и Sb
2, а Sa
1 и Sa
2 при этом должны быть разомкнуты.
Как видно, коллекторный двигатель постоянного тока прост в управлении. Но при этом обладает меньшим КПД, т.к. в единичный момент времени «полноценно работает» только 1 обмотка, а наличие щеточно-коллекторного узла приводит к искрению, стиранию контактов, что является причиной невысокой (по сравнению с другими двигателями) долговечностью.
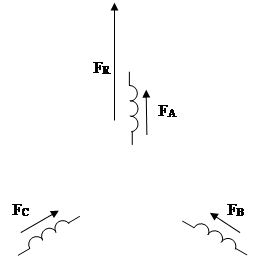
Существуют также бесконтактные двигатели постоянного тока, которые лишены недостатка коллекторных ДПТ, но имеют более сложную схему управления. Рассмотрим принцип действия такого двигателя:
В первоначальный момент времени по обмоткам A, B, C протекают токи так, как указано на рисунке. Намагничивающая сила FR
взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение.

Рисунок 7. Положение ротора в начальный момент времени
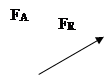
Затем происходит смена токов в обмотке и FR
изменяет свое направление. Ротор продолжает свое вращение, стремясь совместиться с результирующим вектором.
 
 
  
Рисунок 8. Положение ротора с течением времени
Последовательная смена подаваемых токов на обмотках заставляет вращаться ротор в выбранном направлении. Для более плавного изменения направления вектора FR
используют модуляцию.
Схема управления бесконтактным двигателем постоянного тока выглядит следующим образом:
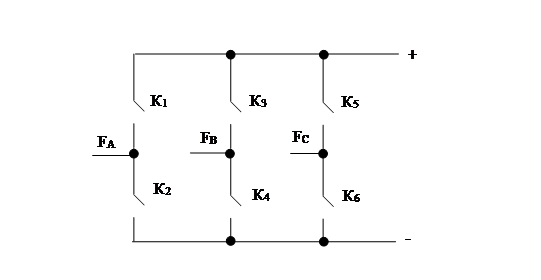
Рисунок 9. Схема управления бесконтактным двигателем постоянного тока
В качестве элемента, отслеживающего положение ротора, обычно используют датчик поворота ротора, который жестко соединен с ротором.
Схема управления таким двигателем сложнее. Однако, это компенсируется высоким КПД двигателя (все 3 обмотки всегда активны), отсутствием щеточно-коллекторного узла (нет искрения, высокая долговечность элементов).
Подведем итог: конструкция двигателей постоянного тока более сложная, стоимость выше и эксплуатация более дорогая, чем асинхронных, поэтому двигатели постоянного тока применяются в приводах, требующих широкого и плавного регулирования частоты вращения, или в автономных установках при питании двигателей от аккумуляторных батарей.
Выбор исполнительного двигателя должен соответствовать поставленным требованиям технического задания:
1. Основное назначение электродвигателя.
2. Тип и параметры источника питания.
3. Конструктивные особенности и массогабаритные показатели двигателя.
4. Тип системы управления двигателем.
5. Условия окружающей среды, в которой предстоит работать.
6. Ориентировочная мощность на валу двигателя, КПД двигателя.
7. Требования по надежности, работе на отказ, возможности проведения планового технического осмотра.
8. Стоимость и эксплуатационные расходы.
Вывод: Использование двигателей переменного тока не представляется возможным, т.к. разрабатываемая система относится к классу бортовых систем. Выбор электродвигателя переменного тока потребует использования дополнительного источника переменного напряжения.
Двигатель постоянного тока лишен этого недостатка – в качестве источника питания для него можно использовать аккумуляторную батарею и генератор постоянного тока, что удовлетворяет условиям технического задания.
Поэтому в качестве желаемого двигателя можно использовать бесконтактный двигатель постоянного тока.
Однако, как уже упоминалось выше, сложная схема управления данным классом двигателей накладывает дополнительные требования к разработке схемы управления.
В связи с тем, что курсовой проект является учебным, по согласованию с руководителем целесообразно использовать коллекторный двигатель постоянного тока с независимым возбуждением. Поставленным требованиям удовлетворяет планетарный мотор-редуктор King Right Motor PT7152 с двигателем постоянного тока. Характеристики электродвигателя:
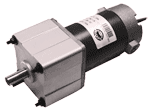
Рисунок 10. Внешний вид выбранного двигателя
· Мощность - 120Вт
· Напряжение питания - 12В
· Скорость холостого хода - 2200 Об/мин
· Номинальная скорость - 1600 Об/мин
· Номинальный ток - 10А
· Крутящий момент двигателя (без редуктора) - 5,4 кг*см
Таблица 1. Характеристики планетарных мотор-редукторов PT7152
| 
|
Передаточное число редуктора
|
|
30
|
|
60
|
|
90
|
|
| Крутящий момент на выходе, кг•см
|
137,7
|
259,2
|
340,2
|
| Скорость на выходе, об/мин
|
53,3
|
26,7
|
17,8
|
| Скорость без нагрузки, об/мин
|
73,3
|
36,7
|
24,4
|
| КПД
|
0.85
|
0.8
|
0.7
|
| Длина редуктора, мм
|
65
|
4.2 Обоснование и выбор усилителя мощности:
Управление исполнительным органом осуществляется путем подачи на него сигнала рассогласования. Однако почти всегда величина сигнала рассогласования слишком мала для восприятия исполнительным элементом. Чтобы усилить ее используются усилители. Существует множество типов усилителей: релейные, электромагнитные, магнитные, полупроводниковые.
Все они обладают как положительными, так и отрицательными сторонами.
Релейное усиление обеспечивает хороший коэффициент усиления U, I, P. Имеет высокое КПД за счет низкого сопротивления контактов; имеет идеальную изоляцию между источником сигнала и нагрузкой. Но в момент коммутации происходит искрение, разрушающее контакты. Это приводит к низкой надежности и малому быстродействию. К тому же системам управления при использовании реле свойственно колебание.
Полупроводниковые усилители обладают высоким быстродействием. Их отрицательная сторона – остаточное напряжение 0.3В
С целью устранения недостатков релейных усилителей используются линейные усилители и усилители с импульсной модуляцией. Рассмотрим принцип действия линейного усилителя:
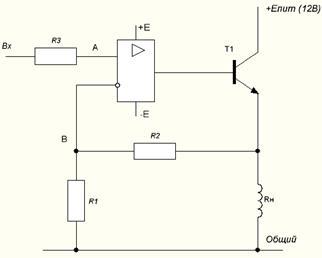
Рисунок 11. Линейный усилитель
Коэффициент усиления такой схемы равен:
 (1) (1)
Для определения необходимого коэффициента усиления по току и по напряжению необходимо выбрать интерфейс, который будет использоваться в разрабатываемой системе.
Существует 4 основных предела изменения абсолютных значений сигналов напряжения постоянного тока:
· От -5В до +5В
· От 0В до +5В
· От 0В до +10В
· От -10В до +10В
Так как в разрабатываемой системе предполагается использовать микроконтроллер, который работает с диапазоном напряжений от 0 до +5В, логично выбрать именно такой интерфейс. Выбранный двигатель работает от напряжения 12В, максимальный выход с микроконтроллера – 5В. Следовательно, коэффициент усиления по напряжению разрабатываемого усилителя должен быть 12 / 5 = 2.4.
Теперь определимся с коэффициентом усиления по току. Пределов изменения силы тока сигналов постоянного тока также четыре:
· От 0А до +5мА
· От -5мА до +5мА
· От 0А до +20мА
· От 4мА до +20мА
Максимальный ток на выходе микроконтроллера составляет 25мА. Минимальный – 0мА. Наиболее близкий интерфейс – от 0А до +20мА. Его и будем использовать в разрабатываемой системе.
Теперь, зная необходимый коэффициент усиления и подставив его в формулу (1), получаем:

Элементы R2 и R1 выбирают по таблицам рядов с учетом рекомендуемых значений не выше 1МОм. Это обусловлено тем, что для правильной работы операционного усилителя (ОУ) на его входах должны быть одинаковые потенциалы (у идеального ОУ; у реальных ОУ величина разности Uсм обычно равна 0.35мВ).
Падение напряжения в точке B равно:

Поэтому чтобы на первом входе (точка А) был такой же потенциал, R3
берут равным по номиналу параллельному включению R1
и R2
. Однако, при изменении температуры суммарное сопротивление группы R1,
R2
будет изменяться по другому, чем у резистора R3
. И если брать очень большие величины сопротивлений данное различие в температурных коэффициентах очень быстро приведет к высокой разности входных потенциалов на входах ОУ и он выйдет в нерабочий режим – насыщение.
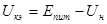
Рассчитаем коэффициент  , который должен иметь выбираемый транзистор для обеспечения тока 10А на выходе схемы (в соответствии с выбранным двигателем). , который должен иметь выбираемый транзистор для обеспечения тока 10А на выходе схемы (в соответствии с выбранным двигателем).
Максимальный ток на выходе ОУ составляет 3мА. Этот ток является током базы транзистора. А т.к. есть ток базы, то появляется ток коллектора, который равен  * Iб
. Отсюда мы можем найти интересующий нас коэффициент: * Iб
. Отсюда мы можем найти интересующий нас коэффициент:
= = =  = = 
Ни один транзистор не обладает таким коэффициентом усиления по току. Поэтому используются составные транзисторы, которые позволяют увеличить за счет того, что суммарная =
1
* 2
* 3
. Электрическая схема такой группы представлена ниже:

Рисунок 12. Схема усиления на составных транзисторах
Входной ток является током базы транзистора Т1. Т.к. существует ток базы у 1го транзистора появляется ток коллектора 1го транзистора, который является достаточным током базы для 2го транзистора. Под действием тока базы Iб2
второй транзистор открывается и появляется Ik
2
, который является током базы для 3го транзистора. Через транзистор Т3 начинает протекать Ik
3
.
Коэффициент у третьего транзистора невысок, порядка 10, т.к. это высокомощный транзистор. У Т2 этот коэффициент меньше – порядка 40. Т1 имеет самый большой коэффициент = 100. Таким образом общий коэффициент усиления данного каскада транзисторов составляет 40000, что является достаточным для нашего случая. Однако, данная схема обладает существенным недостатком – высоким падением напряжения, равным 2.1В
Для уменьшения потерей используется схема Шиклая:
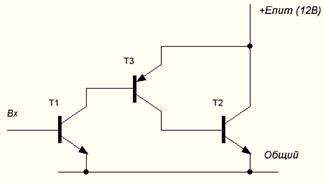
Рисунок 13. Схема Шиклая
Входной ток, протекая через базу транзистора Т1 открывает его. Возникает ток коллектора Iк1
, который является током базы для n-p-n транзистора Т3. В нем возникает ток коллектора, который протекает через базу второго транзистора. Под действием этого тока он открывается и в нем возникает ток коллектора Ik
2
. Общий коэффициент усиления схемы также составляет 40000, но уже при меньшем падении напряжения (1В).
Режим реверса реализуется с введением второго транзистора (n-p-n), показанного на схеме ниже:

Рисунок 14. Схема с режимом реверса
Ток, протекая через базу транзистора Т2 открывает его и возникает Ik
2
.
Для исключения влияния температурного фактора на разрабатываемую схему вместо управления двигателем по напряжению будем использовать управление двигателем по току. Для этого в цепь включается прецизионный по температуре резистор очень небольшого сопротивления 0.01 Ом. В этом случае при изменении температуры сопротивление резистора изменится незначительно, что как раз и дает устойчивость системы к температурному фактору. Падение напряжения на резисторе составляет:
Uпал
= 0.01Ом * 10А = 0.1В
Это очень малая величина, которая не сказывается на КПД двигателя.
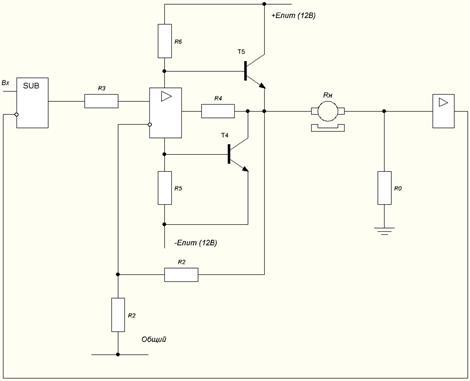
Рисунок 15. Схема управления двигателем по току
Рассчитаем необходимый коэффициент усиления в цепи обратной связи:

Мощность, рассеиваемую на транзисторе, можно найти по формуле:


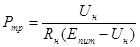
Построим график зависимости рассеиваемой мощности Pтр
от напряжения нагрузки Uн
:
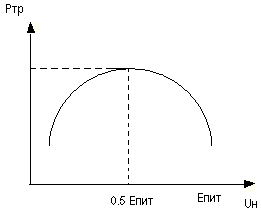
Рисунок 16. График рассеиваемой мощности
Из графика видно, что максимум рассеиваемой мощности приходится на напряжение ½ Eпит
на нагрузке. Следует учитывать, что для отвода 10 Вт рассеиваемой мощности необходимо пространство объемом 1 литр.
Так как двигатель обладает высокой постоянной времени, то он будет продолжать вращаться еще некоторое время после снятия питания. Это свойство используют в импульсных схемах, где напряжение на нагрузку подается не постоянно, а импульсами. Двигатель в этом случае работает в так называем квазилинейном режиме.
Существует множество видов модуляции. Наиболее известные это:
1. Широтно-импульсная модуляция (ШИМ)
2. Частотно-импульсная модуляция (ЧИМ)
3. Амплитудно-импульсная модуляция (АИМ)
4. Импульсная модуляция (ИМ)
ШИМ:
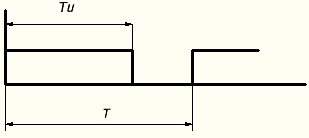
Рисунок 17. Внешний вид широтно-импульсной модуляции
При ШИМ период следования импульсов Т постоянен, изменяется ширина импульса Tи
.
ЧИМ:
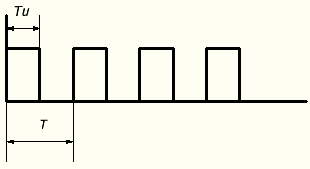
Рисунок 18. Внешний вид частотно-импульсной модуляции
Ширина импульса постоянна, различна частота их следования.
Модуляция позволяет снизить энергозатраты, что приводит к увеличению КПД. Также т.к. через транзистор не всегда течет ток, на нем меньше рассеивается мощности.
Выбираем ШИМ как наиболее простой в реализации вид модуляции – реализуется при помощи генератора пилообразного напряжения и компоратора.
Преобразуем исходную схему линейного усилителя в импульсную:
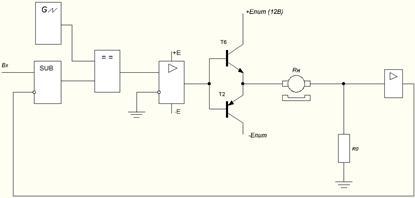
Рисунок 19. Импульсная схема усилителя
В разрабатываемой системе нет отрицательного источника питания, поэтому модернизируем исходную схему, избавившись от отрицательного источника питания:

Рисунок 20. Импульсная схема усилителя с одним источником питания
В представленной схеме для того, чтобы двигатель вращался в одну сторону в точке А создается потенциал +12В, а в точке B 0В. Для вращения двигателя в другую сторону данные потенциалы меняются местами. Если же необходимо, чтобы двигатель не вращался в обоих точках задается потенциал равный +6В.
Вывод : Окончательная импульсная схема управления двигателем с использованием одного источника питания +12В и Н-моста:
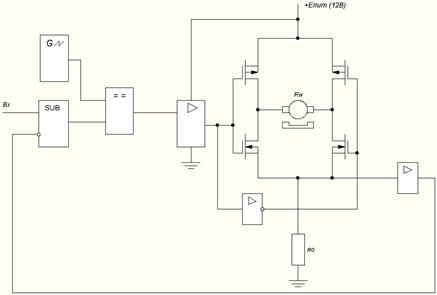
Рисунок 21. Импульсная схема управления на КМОП-транзисторах
В схеме используются КМОП транзисторы как имеющие меньшее падение напряжения.
В разрабатываемой схеме будем использовать усилитель фирмы APEX Microtechnology SA60. Его основные характеристики:
· Рабочая частота – 500 кГц;
· Полномостовой выход 0,1-80 В;
· Выходной ток – 10 А;
· Занимаемая площадь – 1 кв. дюйм;
· Герметичный и удароустойчивый корпус.
4.3 Обоснование и выбор датчика угловой скорости:
Для осуществления обратной связи в цепи управления двигателем по скорости вращения вала двигателя необходим датчик угловой скорости.
К датчикам предъявляются следующие требования:
· Линейность
· Чувствительность (разрешающая способность)
· Стабильность характеристик во времени, температуре, давлении, влажности
· Устойчивость к химическим, физическим воздействиям и т.д.
· Технологичность
Все датчики можно разделить на контактные и бесконтактные. Контактные не подходят для разрабатываемой схемы, т.к. у них низкая надежность и срок службы. Гораздо эффективнее использовать бесконтактные датчики. Они бывают следующего исполнения:
1. Резистивные:

где  - плотность материала, l – длинна, а S – площадь поперечного сечения. - плотность материала, l – длинна, а S – площадь поперечного сечения.
Положительными качествами таких датчиков являются простота, доступность и высокая чувствительность. Отрицательными – низкая надежность (трущиеся материалы), влияние механических воздействий («ступеньки») при переключении, низкая линейность, большой начальный момент трогания.
2. Емкостные:

где S – это площадь, d – расстояние между обкладками
Данная группа датчиков обладает отсутствием трения, «тяжения» и высокой надежностью. Однако, их недостатками является нелинейность, сложность обработки сигналов, низкая точность.
3. Индуктивные – измеряется магнитное поле, которое создается током, протекающим по проводнику.

Такие датчики ценят за простоту конструкции, высокую точность, линейность и надежность. Но у них есть ряд отрицательных качеств: сложность обработки сигнала, большие масса-габаритные показатели и наличие «тяжения».
Существует также множество видов других датчиков.
Наиболее часто в автоматических системах применяют тахогенераторы постоянного и переменного тока, электромагнитные датчики и опто-электрические датчики.
Тахогенераторы представляют собой электрические генераторы небольшой мощности для преобразования частоты вращения в электрический сигнал. Выходное напряжение может достигать 50 В, нелинейность характеристики – не более 2%. Недостатком являются более низкая точность, большие массогабаритные показатели и стоимость. Зато на выходе такого датчика напряжение.
Магнитные датчики содержат установленную на вал двигателя шестеренку из ферромагнитного материала, рядом с которой крепится магнитная головка. При вращении шестеренки на выводах головки появляется переменное напряжение с частотой, равной частоте вращения двигателя, умноженной на количество зубьев на шестеренке.
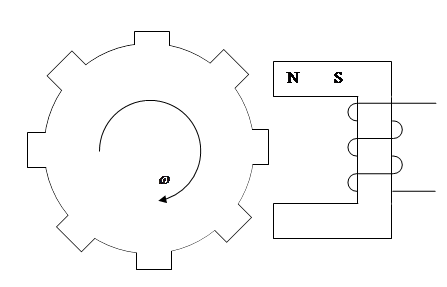
Рисунок 22. Магнитный датчик
Оптоэлектрический датчик (фотоэлектрический преобразователь вращения) включает в себя оптопару, световой поток которой прерывается диском с отверстиями, который насаживается на вал двигателя. Диск с отверстиями прерывает световой поток, и на выходе оптопары формируются импульсы с частотой вращения двигателя, умноженной на количество прорезей в диске.
Для данной системы предпочтителен магнитный датчик, в связи с надежностью и более высоким ресурсом в агрессивной среде. В соответствии с этим выберем магнитный датчик Pepperl+Fuchs серии MBF32. Он обладает следующими характеристиками:
· Гарантированная зона реагирования: 0…35, 0…48,6, 0…60 мм
· 2-, 3-проводная схема подключения
· Частота срабатывания: 400, 1000 Гц
· Тип выхода: PNP, NAMUR (нормально разомкнутый)
· Напряжение питания: 10…30 В, 8 В для датчиков с выходом NAMUR
· Степень защиты IP67
· Диапазон рабочих температур -25…+70°С
4.4 Обоснование и выбор преобразователя для датчика угловой скорости:
Для того, чтобы в дальнейшем использовать данные с датчика угловой скорости необходимо их преобразовать к номинальным значениям.
Сначала необходимо усилить очень слабый сигнал с выхода датчика. Для этого используем схему неинвертирующего усилителя:
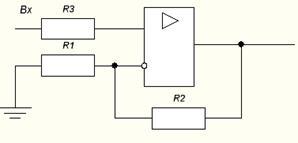
Рисунок 23. Схема неинвертирующего усилителя
Сигнал подается на прямой вход.
При этом коэффициент усиления определяется отрицательной обратной связью:

Далее в схеме ставится компаратор-детектор нулевого уровня с подачей сигнала на прямой вход.
На его выходе будет «+1» если входное напряжение больше нуля, и 0 если напряжение меньше нуля. Таким образом после компаратора мы получим сигнал следующего вида:
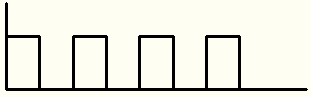
Рисунок 24. Внешний вид сигнала на выходе компаратора
Осталось только измерить количество данных импульсов в единицу времени.
Для этого используется генератор временных интервалов совместно с логическим элементом «И». Затем сигнал подается на счетчик.
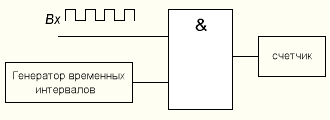
Рисунок 25. Схема подсчета количества импульсов
Чем выше скорость вращения вала, на котором сидит шестеренка, тем с большей частотой наводится сигнал на датчике.
Тем большее количество импульсов попадет в заданный временной интервал и соответственно будет сосчитано счетчиком.
4.5 Обоснование и выбор датчика расстояния
В прошлом бесконтактные датчики расстояния выдавали информацию только лишь о наличии или отсутствии предмета перед датчиком в виде дискретного сигнала ON/OFF.
В наши дни датчики для измерения расстояния могут использовать различные принципы измерений: индуктивный, ультразвуковой или оптический, однако все они имеют электрический выходной сигнал, величина которого пропорциональна расстоянию до измеряемого объекта.
В таблице 1 представлены основные типы аналоговых бесконтактных датчиков для измерения расстояний и их основные особенности.
Таблица 2. Характеристики различных датчиков расстояния

Индуктивные датчики. Индуктивные датчики расстояния определяют расстояния до проводящих металлических объектов, таких как сталь, алюминий, латунь. Поскольку принцип работы индуктивных датчиков основан на определении токов взаимной индукции, такие датчики очень устойчивы к воздействию неметаллических предметов и помех, таких как, например, пыль или машинное масло. Современные технологии позволяют создать индуктивный датчик с аналоговым выходом имеющей диаметр всего 6 мм и измеряемое расстояние 2 мм. Такие датчики с высоким разрешением и быстрым временем отклика находят применение в большинстве высокоскоростных задач.
Емкостные датчики. Принцип действия основан на изменении электрического поля, генерируемого датчиком, при появлении объекта в зоне его чувствительности. В отличии от индуктивных, емкостные датчики реагируют на предметы из любого материала. Емкостные датчики используют для контроля заполнения бутылки (сквозь ее стенку), контроль сыпучих и жидких материалов в бункерах и емкостях, контроль разрыва/провисания ленты и т.п. Необходимо отметить, что в описаниях к изделиям указывается номинальное расстояние срабатывания, измеренное на заземленный лист стали. Если объект выполнен из другого материала, то необходимо пользоваться таблицей поправочных коэффициентов (коэффициент, как правило, меньше единицы и сильно зависит от наличия влаги в материале). Максимальное расстояние срабатывания составляет около 50 мм.
Емкостные датчики обладают высокой надежностью, в них отсутствует эффект «тяжения», трения. Отрицательными качествами является нелинейность, сложность обработки сигналов и низкая точность.
Ультразвуковые датчики. Общий принцип действия ультразвуковых датчиков расстояния основан на излучении импульсов ультразвука и измерении, пока звуковой импульс, отразившись от объекта измерения, вернется обратно в датчик. При этом достигается разрешения до 0,2 мм.
Благодаря тому, что пьезорезистивный преобразователь может служить как излучателем, так и приемником ультразвуковых импульсов, появляется возможность создать ультразвуковые датчики расстояния с одним преобразователем. Такой преобразователь сначала излучает короткий ультразвуковой импульс. Одновременно с этим, в датчике запускается внутренний таймер. Когда отраженный от объекта ультразвуковой импульс вернется обратно в датчик, таймер останавливается. Время, прошедшее между моментом излучения импульса и моментом, когда отраженный импульс вернулся в датчик, служит основой для вычисления расстояния до объекта. Полный контроль за процессом измерения производится с помощью микропроцессора, обеспечивающего высокую линейность измерений. Наиболее важными особенностями применений ультразвуковых датчиков служит их возможность измерять расстояния до таких сложных объектов таких как, например, сыпучие вещества, жидкости, гранулы, прозрачные или напротив сильно отражающие поверхности. В дополнение ультразвуковыми датчиками можно измерять сравнительно большие расстояния, при этом, сохраняя их небольшие размеры, что может быть существенно для ряда применений.
Более простой способ использования ультразвуковых датчиков состоит в приеме уже сгенерированного «маяком» ультразвукового сигнала. В этом случае нет необходимости сначала излучать короткий ультразвуковой импульс, а расстояние до наблюдаемого объекта измеряется путем анализа амплитуды пришедшего сигнала (подразумевается, что максимальная амплитуда сигнала, соответствующая нулевому расстоянию до объекта-маяка, известна). Пьезоэлектрический преобразователь воспринимает звуковую волну и преобразует ее в электрический сигнал.
Однако и ультразвуковые датчики имеют ряд ограничений. Прежде всего, это пена и другие объекты, сильно поглощающие ультразвуковые колебания. Такое поглощение сильно уменьшает измеряемую дистанцию. Сильно изогнутые поверхности так же снижают расстояние и точность измерений, поскольку рассеивают ультразвуковые колебания в различных направлениях. Ультразвуковые датчики излучают импульс в виде широкого конуса, что так же ограничивает возможность измерения расстояния до небольших объектов, увеличивая уровень помех от других объектов, которые так же могут находиться в поле зрения датчика. Некоторые ультразвуковые датчики имеют конус с углом всего 5 градусов. Это позволяет использовать их для измерения намного меньших объектов, например таких, как бутылки или ампулы.
Оптические датчики. Существует множество различных способов измерить расстояние до предмета с помощью оптики: например лазерные интерферометры, датчики с рассеянным отражением света и оптические датчики радарного типа. Каждый из видов датчиков имеет свои сильные и слабые стороны. Лазерные интерферометры имеют большой диапазон измерений и точность несколько нанометров, однако, эти приборы очень дорогие и сложные в эксплуатации. Датчики с рассеянным отражением и аналоговым выходом могут измерять расстояния в широких пределах, однако поскольку они работают с отраженным светом, то могут быть проблемы с измерением расстояний до окрашенных или отражающих объектов. Оптические датчики радарного типа, преимущественно лазерные, могут измерять большие расстояния, однако принцип их работы, основанный на измерении времени распространения света от датчика до объекта и обратно, позволяет измерять с ограниченным разрешением в 2 – 3 мм.
Подавляющее большинство задач по измерению в промышленности приходится на диапазоны от долей микрон до нескольких десятков метров. При этим датчики должны работать с объектами далекими от идеальных: малого размера, имеющих различный цвет, сложную структуру поверхности и перемещающихся с высокой скоростью. Для таких целей наиболее подходят лазерные датчики расстояния, работающие по принципу оптической триангуляции.

Рисунок 26. Принцип работы оптического датчика расстояния
На рисунке показан принцип работы оптического датчика расстояния. Лазер посылает через линзу луч, который отражается от объекта и фокусируется на линейке из фотодиодов, которая преобразует световой сигнал в электрический. Всякое изменение расстояния до объекта вызывает изменение угла отраженного луча и, следовательно, позиции, которую отраженный луч занимает на линейке фотодиодов. Микроконтроллер обрабатывает сигнал от линейки фотодиодов и преобразует его в аналоговый электрический сигнал.
Наиболее важное качество таких датчиков расстояния состоит в сочетании высокой точности измерения и больших измеряемых расстояниях. Большинство производителей предлагают датчики с разрешением от 1 мкм до 1мм. Однако высокая точность возможна только на относительно коротких расстояниях. Так что, например, точность в 1 мкм на расстояниях в 1 метр получить вряд ли удастся.
Для снижения влияния шумов все лазерные датчики расстояний позволяют проводить интегральные или усредненные измерения. При этом производится множество измерений расстояния до объекта и результат потом усредняется, тем самым повышается точность измерений. Однако большая точность требует большого количества измерений, увеличивая при этом общее время измерения. Так, например, что бы обеспечить точность в 1 мкм типичное время измерения составляет порядка 0,1 сек.
Вывод: Рассмотрев предложенные типы датчиков расстояния, остановимся на ультразвуковых датчиках, позволяющих определять расстояния до объектов на дистанциях до 10 метров, а также обладающих точным определением скорости передвижения объекта.
В разрабатываемой системе управления будем использовать датчик фирмы SICK UM30-15113. Он обладает следующими основными характеристиками:

Рисунок 27. Внешний вид выбранного датчика расстояния
· Максимальная дальность 8м;
· Выход: аналоговый 4-20 мA/0-10 В;
· Vпит. 12...30 В;
· корпус М30х1,5 - никелированная латунь, разъём М12, 4 контакта.
4.6 Обоснование и выбор схемы вычитания:
Схема вычитания предназначена для получения сигнала рассогласования между входами.
Схемотехнически она реализуется следующим образом:
Рисунок 28. Схема вычитания


4.7 Обоснование и выбор схемы суммирования:
Схема суммирования предназначена для получения суммарного сигнала с двух входов. Схемотехнически она реализуется следующим образом:
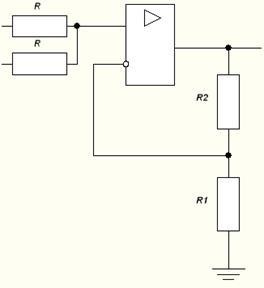
Рисунок 29. Схема суммирования
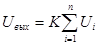

где n – число входов.
4.8 Обоснование и выбор регулятора:
Главная задача систем регулирования состоит в том, чтобы стабилизировать параметры процесса на заданном уровне при воздействии внешних возмущающих воздействий, действующих на объект управления. Этим занимаются системы автоматической стабилизации. Другой не менее важной задачей является задача обеспечения программного перехода на новые режимы работы. Решение этой проблемы осуществляется с помощью той же системы стабилизации, задание которой изменяется от программного задатчика.
К автоматическим системам регулирования предъявляются требования не только по устойчивости процессов регулирования во всем диапазоне нагрузок на объект, но и по обеспечению определенных качественных показателей процесса автоматического регулирования. Ими являются:
· Ошибка регулирования (статистическая или среднеквадратическая составляющие).
· Время регулирования.
· Перерегулирование.
· Показатель колебательности.
Наиболее широко применяются следующие виды регуляторов:
1. П-регулятор – это линейный усилитель (между выходом и входом прямая зависимость), фазовый сдвиг которого в частотном диапазоне входных воздействий пренебрежительно мал. Введение такого регулятора в систему дает статическую ошибку С0
(ошибка по координате), но в некоторых случаях позволяет сделать систему регулирования устойчивой.
2. ПИ-регулятор – регулятор, использующий пропорционально-интегральный закон регулирования. Использование такого регулятора в системе дает астатическую ошибку первого порядка С1
, так называемую ошибку по скорости. При этом за счет интегрального закона регулирования статическая ошибка равна нулю.
3. ПИД-регулятор – основан на пропорционально – интегрально – дифференциальном законе регулирования системы. Как и ПИ-регулятор, ПИД обеспечивает астатическое регулирование. При этом С0
и С1
равны нулю, за счет использования трех звеньев. Данный вид регуляторов плавно уменьшает ошибку регулируемой величины в ходе своей работы. Полезным свойством данных регуляторов является возможность преобразования выходного сигнала в ШИМ.
Вывод: Для создания регулятора будем использовать ПИД-регулятор.
Разрабатываемую функциональную схему можно условно разделить на 3 блока:
- Блок управления скоростью вращения левого колеса
- Блок управления скоростью вращения правого колеса
- Блок определения расстояния и направления до объекта следования
Функциональная схема устройства представлена в приложении А.
В настоящее время происходит бурный рост цифровой техники. Повсеместно создается множество цифровых элементов, которые раньше можно было реализовать только в аналоговом варианте. Цифровые элементы более надежны, функциональны и обладают рядом достоинств:
1. Полностью отсутствует дрейф нуля;
2. Имеется возможность запоминания и коррекции измеряемых значений управляемых (скорость, ускорение, угол) и управляющих (ШИМ) величин;
3. Способны к многоконтурному управлению без наращивания аппаратуры;
4. Способны реализовать не только традиционные линейные законы управления, но и нелинейные.
Исходя из этого разрабатываемую систему управления будем проектировать как цифровую систему управления. В этом случае многие элементы функциональной схемы можно заменить одним – микроконтроллером.
Микроконтроллер – это устройство, включающее в себя ОЗУ, ПЗУ, способное выполнять заложенную в него программу. В зависимости от комплектации МК может иметь и АЦП, ШИМ-модулятор, и т.д.
Наиболее известными являются микроконтроллеры фирмы «Microchip». Их основные особенности это:
1. Достаточно низкая цена 2-10$;
2. Высокая надежность;
3. Развитая периферия;
4. Высокое быстродействие (выполнение команды составляет 100-200 нсек);
Данная фирма выпускает следующие серии микроконтроллеров:
· серия 12С5х – простейшие контроллеры (таймер, DIP8);
· серия 12С67х – простейшие контроллеры (таймер, АЦП, DIP8);
· серия 16С7х – самые распространенные и наиболее «напичканные» периферийными устройствами;
· серия 16С77х – с 12-ти битными АЦП;
· серия 16С78х – АЦП, ЦАП, операционный усилитель, компаратор;
· серия 16С64(66)х – с аналоговыми компараторами 16С7х;
· серия 16С8х – модернизированный вариант старой серии 16С5х;
· серия 16С9хх – имеет выход на ЖКИ;
· серия 17Схх – имеет встроенный умножитель чисел и ориентирована на выполнение математических операций;
· серия 16F87Х – аналог 16C7х но с Flash-памятью 10-ти битными АЦП;
· серия 16С8ххх – 10-ти битные АЦП, 40 МГц тактовая частота, 4 таймера.
При выборе микроконтроллера следует учесть, что сигналы с выходов датчиков будут подаваться в аналоговом виде. Значит, для их обработки необходим АЦП. Исходя из этого выберем серию 16F87x для использования в системе управления.
Список литературы
1. Сборник научных трудов «Мобильные робототехнические комплексы» – М.:ИФТП 1990г.
2. Библиотека электронных компонентов. Выпуск 3: Силовая электроника фирмы HARRIS – М. ДОДЭКА,
1999 г., 32 с.
3. Лекции по курсу “ Технология проектирования СУ ” Ерилов Ю.В.
4. Лекции по курсу “ Микропроцессорные устройства систем управления ” Морозов Б.А.
5. Лекции по курсу “ Микроконтроллеры ” Морозов Б.А.
|