Содержание
Введение
1.Определение структуры и параметров объекта управления
2.Разработка алгоритма управления и расчет параметров устройств управления
3.Моделирование процессов управления, определение и оценка показателей качества
4.Разработка принципиальной электрической схемы
Список литературы
Введение
На современном этапе развития техники существенную роль в производстве играет автоматизированный электропривод. Именно с его помощью возможно повышение качества и эффективности труда, экономия затрат на единицу продукции, увеличение количества производимой продукции в единицу времени. Электропривод состоит из двух основных частей: силовой – электрический, электромеханический и механический преобразователи, и информационной – система управления электропривода. Выбор надлежащих элементов силовой части позволит сэкономить потребление электроэнергии. Правильный выбор настройки информационной части поможет сэкономить не только электроэнергию, но и повысить надежность и качество технического процесса, увеличить быстродействие. В данной курсовой работе рассматривается система управления ДПТ путем регулирования тока возбуждения.
1. Определение структуры и параметров объекта управления
В состав объекта управления входит двигатель постоянного тока серии Д-12, ШИП в цепи возбуждения с частотой коммутации 5кГц, тиристорный стабилизатор тока якоря, рабочий орган упруго связанный с двигателем.
Технические данные двигателя Д12:
Номинальная мощность 2.5кВт
Напряжение питания якоря 220В
Напряжение питания ОВ 220В
Номинальный ток якоря 14.6А
Номинальная частота вращения 1140 об/мин
Максимальная частота вращения 3600 об/мин
Момент инерции якоря 0.05 кг*м2
Расчитаем недостающие параметры двигателя, необходимые в дальнейших расчётах.
Номинальная скорость привода:

Максимальная скорость привода:

Номинальный момент:

Машинная постоянная:

Скорость идеального холостого хода:

Сопротивление обмотки якоря:

Индуктивность обмотки якоря:

Жесткость механической характеристики:

Электромагнитная постоянная времени:

Механическая постоянная времени:

Принимаем ток возбуждения равным: 
Для двигателя данной мощности постоянная времени обмотки возбуждения:
Сопротивление обмотки возбуждения:

Индуктивность обмотки возбуждения:

Расчитаем параметры упругой двухмассовой системы.
Согласно заданию на курсовой проект 
Частота упругих колебаний 
Коэффициент соотношения масс  , тогда , тогда 
 , ,
тогда жесткость двухмассовой системы

Постоянная времени двухмассовой системы

По заданию электропривод имеет нагрузку в видя вязкого трения первого рода с 
ТП в цепи якоря
Проверим цепь якоря на необходимость применения сглаживающего реактора.
Условие сглаживания тока:
 , ,

Условие не выполняется, необходимо ввести сглаживающий реактор

ШИП в цепи возбуждения
Учитывая большую индуктивность обмотки возбуждения и частоту коммутации ключей, пульсаций тока возбуждения не будет.
3. Разработка алгоритма управления и расчет параметров устройств управления
Составим структурную схему модели электропривода

Рис. 1 Структурная схема СЭП.
Настройка.
1. Контур тока якоря.
Задание на номинальный ток якоря 10В, тогда  , ,
коэффициент передачи тиристорного стабилизатора:  . .
Принимаем постоянную времени тиристорного стабилизатора напряжения  . .

2. Контур тока возбуждения
Задание на номинальный ток 10В, тогда  . .
Учитывая возможность форсирования привода по обмотке возбуждения в 2 раза, то  . Принимаем . Принимаем  . .

3. Контур скорости
Задание на скорость 10В, тогда  . .

Для разгона ЭП до  нужно подать задание на скорость нужно подать задание на скорость
 . .
4. Моделирование процессов управления, определение и оценка показателей качества
Расчетный режим работы 
Максимальное ускорение, развиваемое электроприводом

Максимальная скорость в режиме слежения

Расчетная частота 
Синтезируем систему комбинированного управления, добавив в неё дополнительное задание по скорости, которое выглядит следующим образом:
 , принимаем , принимаем 
Установившаяся ошибка должна быть

Рис. 2 Модель ЭП с учетом дискретности преобразователей.
На рис. 4 блок Subsystem – блок, моделирующий стабилизатор напряжения, Subsystem1 – блок, моделирующий определения угла управления из уравнения  . Где Uу
– напряжение управления, приведенное к стандартному ряду -10…10В, Um
– максимальное напряжение пилообразного сигнала, приведенный к стандартной шкале -10…10В. . Где Uу
– напряжение управления, приведенное к стандартному ряду -10…10В, Um
– максимальное напряжение пилообразного сигнала, приведенный к стандартной шкале -10…10В.
В модели не учитывается дискретность ШИМ преобразователя в цепи возбуждения, так как частота коммутации достаточна для данного допущения.
Моделирование.
1. Пуск привода на номинальную скорость (7.78В) при линейном изменении задания.

Рис. 3 Графики зависимостей  . .
Статическая ошибка по скорости составляет 2.2 рад/с, что удовлетворяет требованиям.

Рис. 4 Переходный процесс по току якоря
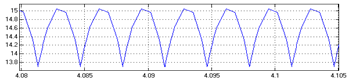
Рис. 5 Пульсации тока якоря в установившемся режиме
Из рис. 5 видно, что амплитуда пульсаций тока составляют 1.2 А, для двигателя допустимая амплитуда пульсаций 0.2*Iном
= 0.2*14.6 = 2.92 А
Отработка приводом синусоидального задания с 

Рис. 6 Графики зависимостей  . .
Проведем эксперимент отработки приводом задания 

Рис. 7 Графики зависимостей .
Полоса пропускания привода  , при , при 

Рис. 8 Графики зависимостей .
5. Разработка принципиальной электрической схемы и выбор её элементов
1. Контур тока якоря.

Рис. 9 Регулятор тока якоря. Схема принципиальная
Принимаем  , ,

Необходимо ограничение выходного сигнала на уровне 10В, следовательно выбираем стабилитрон с напряжением стабилизации 10В.
В качестве датчика тока выбираем ДТХ – 10.
Технические данные ДТХ – 10:
Допустимая перегрузка по измеряемому току (разы) 1.5
Диапазон рабочих температур -20…+80 0
С
Основная и приведенная погрешность 1%
Нелинейность выходной характеристики 0.1%
Номинальный ток 10 А
Коэффициент передачи 1:2000
Полоса пропускания 1…50000Гц
Источник питания 15В 10%
Учитывая номинальный входной ток и коэффициент передачи, то номинальный выходной сигнал составляет 10/2000 = 0.005 А. Входной ток  , тогда выходной ток , тогда выходной ток 

Рис. 10 Схема формирования сигнала - (UЗТЯ
- UОТЯ
)
Принимаем  , ,

Выбираем:
R9
, R12
, R13
, R17
, R19
– C2-29В-0.125-10 кОм±0.05%
R6
– C2-29В-0.125-7.3 Ом±0.05%
R21
– C2-29В-0.125-192 Ом±0.05%
С17
– К73-17-63В-12.3 мкФ±0.5%
VD2 – КС210Б
DA1.4, DA1.6, DA1.8 – К140УД17А
DA2 – AD1403
2. Контур скорости
Выберем тахогенератор ТГП-60.
Технические данные ТГП-60:
Номинальная частота вращения 1500 об/мин
Крутизна выходного напряжения 60 мВ/(об/мин)
Нелинейность выходного напряжения 0.1 %
Асимметрия выходного напряжения 0.2 %
Коэффициент пульсации 2.5%
Сопротивление нагрузки 6 кОм
Температурный коэффициент
выходного напряжения 0.01%/0
С
Момент инерции ротора 10-5
кг/м2
Статический момент трения 10-2
Нм
Максимальная частота вращения привода 1140 об/мин, тогда напряжение на выходе тахогенератора  . .

Рис. 11 Схема формирования сигнала КРС
(- UЗС
+ UОС
)
Принимаем  , ,



Всвязи с коммутационными процессами, имеющими место в коллекторном узле тахогенератора, необходим фильтр.
Принимаем постоянную времени фильтра  с. с.

Выходной сигнал ограничивается на уровне 10В стабилитроном с напряжением стабилизации 10В.
Выбираем:
R1
– C2-29В-0.125-87.4 кОм±0.05%
R2
, R5
, R7
– C2-29В-0.125-10 кОм±0.05%
R3
, R4
– C2-29В-0.125-145 Ом±0.05%
С1
– К73-17-63В-46 пФ±0.5%
VD1 – КС210Б
DA1.1, DA1.2 – К140УД17А
Блок компенсации по первой производной скорости:

Рис. 12 Схема формирования сигнала (КК
∙р)
Принимаем  , ,

Выбираем:
R8
– C2-29В-0.125-1 МОм±0.05%
С4
– К73-17-63В-1.5 мкФ±0.5%
DA1.3 – К140УД17А
3. Контур тока возбуждения

Рис. 13 Регулятор тока возбуждения. Схема принципиальная
Принимаем  , ,
Необходимо ограничение выходного сигнала на уровне 10В, следовательно выбираем стабилитрон с напряжением стабилизации 10В.

Рис. 14 Схема формирования сигнала (- UОТВ
)
В качестве датчика тока выбираем ДТХ – 10.
Принимаем  , ,

Выбираем:
R10
– C2-29В-0.125-73 Ом±0.05%
R11
– C2-29В-0.125-1 МОм±0.05%
R20
, R23
, R24
– C2-29В-0.125-1 кОм±0.05%
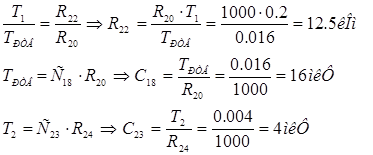
R22
– C2-29В-0.125-12.5 кОм±0.05%
С18
– К73-17-63В-16 мкФ±0.5%
С23
– К73-17-63В-4 мкФ±0.5%
VD3 – КС210Б
DA1.5, DA1.9, DA1.10 – К140УД17А
Для подавления помех между выводами питания микросхем и общим проводом подключаются конденсаторы – К10-17-25В-0.1мкФ±0.5%.
Список используемой литературы
1. Справочник по электрическим машинам: В 2т./Под общ. Ред. И.П. Копылова и Б.К. Клокова. Т. 1. – М.: Энергоатомиздат, 1988, - 456с.
2. Башарин А.В., Новиков В.А., Соколовский Г.Г. «Управление электроприводами»: Учебное пособие для вузов. – Л.:Энергоатомиздат. Ленингр. Отделение,1982, - 392с.
3. Ключев В.И. «Теория электропривода»: Учеб. Для вузов. – 2-е изд. Перераб. И доп. – М.: Энергоатомиздат, 2001, - 704 с.
4. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MatLab 6.1: Учебное пособие. – СПб.: кОРОНА принт, 2001, - 320 с.
5. Справочник разработчика и конструктора РЭА. Элементная база: В 2 кн./Масленников М.Ю., Соболев Е.А. и др. – М.: Б. И., 1996, - 157 – 300 с.
6. Операционные усилители и компараторы. – М.: Издательский дом «ДОДЭКА ХХI», 2002, - 560 С.
7. Александров К.К., Кузьмина Е.Г. Электрические чертежи и схемы. – М.:энергоатомиздат, 1990, - 288 с.
|