| Предмет: Теория Автоматического Управления
Тема: Частотные характеристики дискретных систем управления
1. Частотное представление дискретного сигнала
Для представления дискретного сигнала в частотной области используется одна из формул дискретного преобразования Лапласа.
Получим эту формулу. Для выхода импульсного элемента можно записать соотношение:
 . (1) . (1)
Для нахождения изображения x*(p) воспользуемся теоремой умножения в комплексной области: изображение произведения равно свертке изображений.

то
 (2) (2)
Условие полюса:
e-sT
= 1 = e0
;  где где 
Полюса расположены на мнимой оси комплексной плоскости. Один из них расположен в точке ноль, а остальные лежат на мнимой оси с шагом wп
= 2p/Т, где wп
– частота прерывания. Определим вычет в одном из полюсов.

Применим правило Лопиталя

Значение вычета будет таким же во всех остальных полюсах.
 (3) (3)
Получили формулу дискретного преобразования Лапласа, но так как сумма находится в пределах от -¥ до +¥, то практически использовать эту формулу в качестве дискретного преобразования нельзя.
Эта формула используется для частотного представления дискретного сигнала.
 (4) (4)
Пусть задан частотный спектр сигнала на входе ИЭ (рис.2), необходимо определить частотный спектр сигнала на выходе. Частотный спектр строим для различных значений к, используя формулу
 (5) (5)
 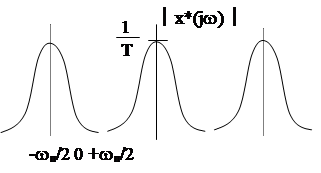
Рис. 2
Частотный спектр выходного сигнала состоит из спектра входного сигнала ослабленного в 1/Т раз и спектров дополнительных сигналов сдвинутых по оси частот на величину ±кwп
.
Если стоит задача восстановить входной сигнал, то на выходе ИЭ необходимо поставить фильтр, который пропускает только частоты спектра входного сигнала, а остальные фильтрует (рис. 3).

Рис. 3
Входной сигнал можно восстановить в том случае, если частоты выходных спектров не перекрываются (w1
< wп
/2), в противном случае восстановить входной сигнал невозможно (w1
–верхняя граничная частота). Это условие называется теоремой Котельникова, которая формулируется следующим образом: без потери свойств непрерывного сигнала его можно заменить дискретным, а значит и дискретный заменить непрерывным, если частота квантования в 2 раза больше частоты высшей гармоники передаваемого сигнала.
2. Частотные характеристики дискретных систем управления
Частотные характеристики дискретных систем автоматического управления определяются также как и для непрерывных систем с учетом некоторых особенностей. Рассмотрим систему (рис. 1).

Рис. 1 Пусть на вход системы подается сигнал  или в комплексной форме или в комплексной форме  , при этом сигнал на выходе импульсного элемента равен , при этом сигнал на выходе импульсного элемента равен  или в комплексной форме или в комплексной форме  , где , где  представляет собой безразмерную частоту. представляет собой безразмерную частоту.
Для непрерывной системы зависимость между входным и выходным сигналом определяется через интеграл свертки
 . (1) . (1)
Для дискретных систем это соотношение имеет вид:
 (2) (2)
где  - комплексный коэффициент передачи. - комплексный коэффициент передачи.
Для построения частотных характеристик используется соотношение
 . (3) . (3)
Это выражение представляет собой сумму векторов до точек  и т. д., при этом количество необходимых векторов зависит от ширины полосы пропускания системы. Если частота квантования велика по сравнению с шириной полосы пропускания, то достаточно использовать 2-3 члена суммы ряда. и т. д., при этом количество необходимых векторов зависит от ширины полосы пропускания системы. Если частота квантования велика по сравнению с шириной полосы пропускания, то достаточно использовать 2-3 члена суммы ряда.
Выражения для амплитудно-частотной и фазочастотной характеристик определяются из соотношений
 , (4) , (4)
 . .
Так как частотные характеристики являются периодическими функциями частоты с периодом 2p, то они полностью определяются ее значениями на интервале  . Так как АФХ дискретной системы является симметричной относительно действительной оси (в соответствии со свойством дискретного преобразования Фурье), то ее достаточно рассматривать на интервале частот . Так как АФХ дискретной системы является симметричной относительно действительной оси (в соответствии со свойством дискретного преобразования Фурье), то ее достаточно рассматривать на интервале частот  . .
Пример 1. Построить АФХ дискретной системы, если передаточная функция ее непрерывной части имеет вид
 . .
Решение: Передаточная функция дискретной системы имеет вид
 , где , где  . .
Выполнив подстановку р = jw, получим
 . .
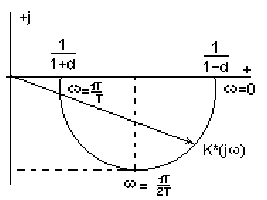
Изменяя частоту на интервале  , находим соответствующие значения K*(jw), которые заносим в таблицу 1. , находим соответствующие значения K*(jw), которые заносим в таблицу 1.
Таблица 1
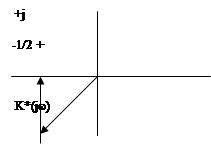
В соответствии с таблицей 1 строим график АФХ (рис.3а).
Выражение для амплитудно-частотной характеристики имеет вид
 . .
График амплитудно-частотной характеристики приведен на рис. 3б.
а) б)
Рис. 3
Пример 2. Построить частотную характеристику системы, схема ко-торой приведена на рис. 4, если T = 1 с, kv
= 1 c-1
.

  
     
 - -
Рис. 4
Решение: Передаточная функция разомкнутой дискретной системы в форме z – преобразования

При этом выражение для частотной характеристики имеет вид

Рис. 5
Строим характеристику на интервале частот 0 £ w £ p/T в дальнейшем характеристики повторяются т. к. они носят периодический характер (рис 5).
Литература
1. Автоматизированное проектирование систем автоматического управления./Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332с.
2. Гринченко А.Г. Теория автоматического управления: Учебн. пособие. - Харьков: ХГПУ, 2000. –272с.
3. Егоров К.В. Основы теории автоматического регулирования, учебное пособие для вузов, изд. 2-е, перераб. и доп., - М.: "Энергия", 1967. - 648с., ил.
4. Куропаткин П.В. Теория автоматического управления. Учеб. пособие для электротехн. спец. вузов. - М.: "Высшая школа", 1973. - 528с., ил.
5. Основы линейной теории автоматического управления в задачах электроэнергетики: Учебное пособие к компьютерным лабораторным практикумом АОС-ТАУ/ В.Ф. Коротков; Иван. гос. энерг. ун-т. - Иваново, 1994. - 392с.
6. Справочник по теории автоматического управления. /Под ред. А.А. Красовского- М.: Наука, 1987. - 712с.
7. Теория автоматического управления. Учеб. для вузов по спец. "Автоматика и телемеханика". В 2-х ч./ Н.А. Бабаков, А.А. Воронов и др.: Под ред. А.А. Воронова. - 2-е изд., перераб. и доп. - М.: Высш. шк., 1986. - 367с., ил.
|

 w
w