Вступ
Інформація – це відомості, які є об’єктом добування, зберігання, обробки і передачі. Поняття інформації нерозривно пов’язано з поняттям системи і є умовою системного дослідження. Під системою розуміють сукупність взаємопов’язаних різнорідних пристроїв (частин і підсистем) в умовах взаємодії з зовнішнім середовищем. Системи, які забезпечують добування, зберігання, обробку і передачу інформації, називаються інформаційними системами. Інформаційні системи, які забезпечують передачу і прийом інформації, називаються системами передачі інформації (СПІ). Отже, СПІ служать для передачі інформації в просторі.
Повідомлення – це форма представлення інформації. Передача повідомлень в СПІ від відправника до користувача (утримувача інформації або повідомлень) відбувається за допомогою сигналів. Як сигнал може використовуватись будь-який фізичний процес, що однозначно відображає повідомлення, яке передається. Отже, сигнал є матеріальним переносником інформації. Повідомлення, що передається, є випадковою величиною або випадковою функцією. Детерміновані повідомлення інформації не несуть і немає сенсу їх передавати. Відповідно сигнали теж слід розглядати як випадковий процес.
Системою передачі інформації називається сукупність функціонально об’єднаних пристроїв, призначених для передачі повідомлень із одного пункту в інший.
Переваги цифрових систем передачі інформації:
- висока завадостійкість, що дозволяє досягти більш повного використання пропускної здатності каналу при високих якісних показниках передачі інформації;
- висока універсальність ЦСПІ щодо характеру джерел й користувачів повідомлень, також об’єднання різних потоків у єдиній цифровій лінії зв’язку;
- менша схильність до впливу апаратурних нестабільностей, відносна простота сполучення ЦСПІ різних типів;
- можливість виявлення та усунення помилок інформаційних повідомлень у процесі обробки сигналів за рахунок кодування;
- менші габарити та більша надійність апаратури формування та приймання цифрових сигналів за рахунок широкого застосування сучасної елементної бази (DSP, однокристальних мікроЕОМ, програмувальних логічних інтегральних схем (ПЛІС)).
Недоліки ЦСПІ:
- високі вимоги до обчислювальних засобів обробки сигналів;
- складність синхронізації передавальної та приймальної апаратури;
- погіршення якості носить пороговий характер.
Джерело повідомлень – це пристрій, що здійснює вибір повідомлень з ансамблю повідомлень (тобто, це фізичний об’єкт або система, що формує повідомлення). Ансамблем повідомлень (сигналів) називають безліч можливих повідомлень (сигналів) з заданими розподілами ймовірностей. Таким пристроєм може бути будь-який датчик, ПЕОМ і т. ін. Залежно від типу повідомлень розрізняють дискретні та неперервні джерела.
Кодер джерела – пристрій, задачею якого є економне (в розумінні мінімуму середньої кількості символів) подання повідомлення з метою підвищення швидкості його передачі або зменшення смуги частот СПІ. Як кодер джерела повідомлень може виступати аналогово-цифровий перетворювач, який перетворює неперервний сигнал повідомлення u(t)
в рівномірний простий код u(nT)
.
Кодер каналу забезпечує необхідну достовірність передачі повідомлень застосуванням, наприклад, перешкодостійкого кодування. Кодер каналу зменшує кількість помилок, що виникають в процесі передачі по каналу з завадами. На виході кодеру каналу формується послідовність кодових символів, яка називається кодовою послідовністю.
Модулятор виконує операцію модуляції, тобто зміну одного або декількох параметрів носія інформації відповідно до повідомлення, що передається. На вхід модулятора надходить повідомлення, як правило, у вигляді низькочастотного сигналу, а на виході формується високочастотний сигнал, параметри якого змінені відповідно до повідомлення. Після модулятора сигнал підсилюється за потужністю і надходить в лінію зв’язку.
Лінія зв’язку – це фізичне середовище, у якому поширюються сигнали. В радіолініях середовищем поширення сигналів є частина простору, в якому поширюються електромагнітні хвилі від передавача до приймача.
Демодулятор перетворює прийнятий промодульований сигнал, викривлений перешкодами, в сигнал, який описує модулюючу функцію.
Декодер каналу – декодує прийняту послідовність відповідно типу кодуванню, яке було застосовано кодером повідомлення. Тобто виконує операцію, обернену кодуванню.
Користувач повідомлень – це пристрій (магнітофон, ПЕОМ і т.ін.).
Сукупність кодуючого та декодуючого пристрою називають кодеком, а сукупність модулятора та демодулятора – модемом. Сукупність модулятора, демодулятора і лінії зв’язку утворюють канал зв’язку.
1.
Джерело повідомлень
Щільність розподілу ймовірності за рівномірним законом описується виразом:
 (1.1) (1.1)
І має наступний вигляд:
 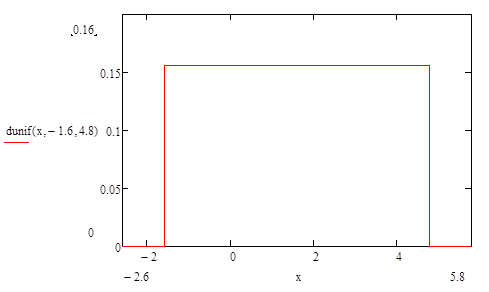
Рисунок 1.1 – Щільність ймовірності миттєвих значень повідомлення
Даний графік був побудований за допомогою функції runif в програмі MathCad.
Математичне сподівання визначається
 (1.2) (1.2)
Дисперсія визначається
 (1.3) (1.3)
Середня квадратична похибка:
 (1.4) (1.4)
З отриманого виразу одномірної щільності ймовірності миттєвих значень повідомлення х
(t
) будуємо випадковий процес (рисунок 1.2). У даному випадку побудовано графік із 10 випадкових точок:

 Рисунок 1.2 – Випадковий процес
2. Кодер джерела
Визначення інтервалу дискретизації повідомлення х
(t
) за часом проведено за формулою:
 (2.1) (2.1)
Крок квантування визначається:
 (2.2) (2.2)
Середня потужність шуму квантування:
 (2.3) (2.3)
Відношення середньої потужності шуму квантування до середньої потужності сигналу:

Число розрядів вихідної кодової комбінації АЦП:
 (2.4) (2.4)

Двійкові кодові комбінації, що відповідають L рівням квантування, приведені у таблиці 2.1
Таблиця 2.1 – двійкові кодові комбінації, що відповідають L рівням квантування
| N з/п |
x(tk
), В |
Кодова комбінація |
| 1 |
-1,6 |
 |
| 2 |
-1,173 |
 |
| 3 |
-0,746 |
 |
| 4 |
-0,319 |
 |
| 5 |
0,108 |
 |
| 6 |
0,535 |
 |
| 7 |
0,962 |
 |
| 8 |
1,389 |
 |
| 9 |
1,816 |
 |
| 10 |
2,243 |
 |
| 11 |
2,67 |
 |
| 12 |
3,097 |
 |
| 13 |
3,524 |
 |
| 14 |
3,951 |
 |
| 15 |
4,378 |
 |
| 16 |
4,805 |
 |
Ентропія джерела дискретних повідомлень
 (2.5) (2.5)
а оскільки повідомлення рівно ймовірні і
 , ,
то ентропію можна визначити як
 (біт/повідомлення) (2.6) (біт/повідомлення) (2.6)
Число двійкових символів, що видає АЦП в одиницю часу:
 (символів/секунду) (2.7) (символів/секунду) (2.7)
Тривалість символів двійкового коду:
 (2.8) (2.8)
3.
Кодер каналу
Двійкові кодові комбінації завадостійкого коду
7
6
5
4
3
2
1
U1
0 0 0 0 0 0 0
U2
0 0 0 0 1 1 1
U3
0 0 1 1 0 0 1
U4
0 0 1 1 1 1 0
U5
0 1 0 1 0 1 0
U6
0 1 0 1 1 0 1
U7
0 1 1 0 0 1 1
U8
0 1 1 0 1 0 0
U9
1 0 0 1 0 1 1
U10
1 0 0 1 1 0 0
U11
1 0 1 0 0 1 0
U12
1 0 1 0 1 0 1
U13
1 1 0 0 0 0 1
U14
1 1 0 0 1 1 0
U15
1 1 1 1 0 0 0
U16
1 1 1 1 1 1 1
3, 5, 6, 7 – інформаційні розряди
1, 2, 4 – перевірочні розряди
На рисунку 3.1 представлена функціональна схема кодера завадостійкого коду.

Рисунок 3.1 – функціональна схема кодера завадостійкого коду
М2 – суматори за модулем 2, Т – комірки пам’яті регістру зсуву
Надмірність отриманого завадостійкого коду:
 (3.1) (3.1)
4. Модулятор
Структурна схема модулятора зображена на рисунку 4.1.
ГТІ – генератор коливань, -1 – інвертор, ≥1 – елемент АБО, Тг – тригер з лічильниковим входом, СФ – смуговий фільтр.
Тригер змінює свій стан на протилежний по кожному імпульсу, що надходить на його вхід. Смуговий фільтр виділяє першу гармоніку, яку використовують як несуче коливання.
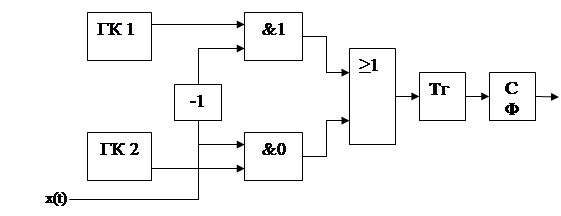
Рисунок 4.1 – структурна схема модулятора
Аналітичний вираз для модульованого сигналу:
 (4.1) (4.1)
Часова діаграма модулюючого сигналу зображена на рисунку 4.2.
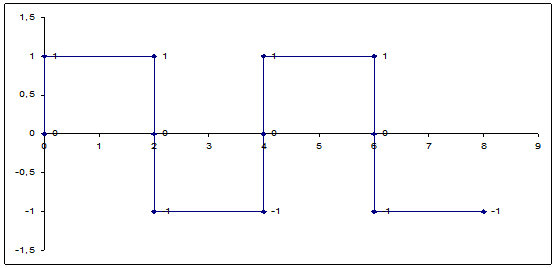
Рисунок 4.2 – часова діаграма модулюючого сигналу
Часова діаграма модульованого сигналу зображена на рисунку 4.3.
6 |
|
    Рисунок 4.3 – часова діаграма модульованого сигналу
Кореляційна функція модулюючого сигналу
 (4.2) (4.2)
Графік кореляційної функції модулюючого сигналу зображений на рисунку 4.4.

Рисунок 4.4 – графік кореляційної функції модулюючого сигналу
Спектральна щільність потужності модулюючого сигналу
 (4.3) (4.3)
 (4.4) (4.4)
Графік спектральної щільності потужності модулюючого сигналу (рисунок 4.5).
   Рисунок 4.5 – Графік спектральної щільності потужності модулюючого сигналу
На даному графіку відкладено також значення практичної ширини енергетичного спектра модулюючого сигналу 
 (4.5) (4.5)
 (4.6) (4.6)
Графік енергетичного спектра модульованого сигналу зображений на рисунку 4.6.

 Рисунок 4.6 – графік енергетичного спектра модульованого сигналу
Ширина енергетичного спектра модульованого сигналу позначена на графіку
Значення ширини енергетичного спектра модульованого сигналу
 (4.7) (4.7)
5. Канал зв’язку
Потужність шуму в смузі частот каналу П
= ∆Fs
  (5.1) (5.1)
Нехай потужність прийнятого сигналу
Pc
=0,05 (В2
)
Тоді відношення сигнал шум
 (5.2) (5.2)


Пропускна здатність каналу
 (5.3) (5.3)
Ефективність використання пропускної здатності каналу
 (5.4) (5.4)
6. Демодулятор
Алгоритм оптимального когерентного прийому за критерієм максимуму функції правдоподібності при рівноймовірних символах для каналу з білим гаусівським шумом
 (6.1) (6.1)

y(t) – прийнятий сигнал, x(t) – очікуваний сигнал
Структурна схема оптимального когерентного демодулятора для частотної модуляції зображена на рисунку 6.1.
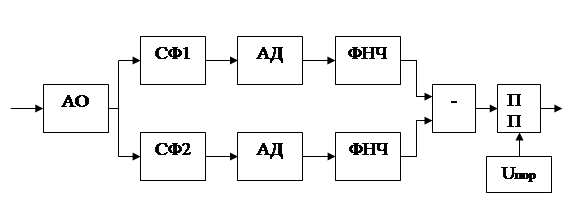
Рисунок 6.1 – Cтруктурна схема оптимального когерентного демодулятора для частотної модуляції
АО – амплітудний обмежувач сигналів (обмежує рівень прийнятого сигналу для виключення паразитної амплітудної модуляції). СФ – смугові фільтри (налаштовані на відповідну смугу частот), АД – амплітудний детектор (виділяє обвідну сигналу на виході смугового фільтру), ФНЧ – фільтр низьких частот (придушує залишки несучої і вищих гармонік на виході АД, наближає форму прийнятого сигналу до форми переданого)
F1=8,811–2,2=6,811 (кГц)
F2=8,811+2,2=10,811 (кГц)
Ймовірність помилки для оптимального демодулятора
 (6.2) (6.2)
Для зменшення ймовірності помилки необхідно збільшувати енергію сигналу.
При частотні модуляції енергетичний виграш за піковою потужністю складає 2 рази у порівнянні з амплітудною модуляцією і програє у 2 рази у порівнянні з фазовою модуляцією.
За середньо потужністю: програє в 2 рази у порівнянні з ФМ і є рівним у порівнянні з АМ.
7. Декодер
Після передачі отриманий код Z може відрізнятися від переданого Y вектором помилок E
 (7.1) (7.1)
З прийнятим кодом виконуються контрольні операції, що можна описати як помноження цього вектора Z на перевірочну матрицю H
 (7.2) (7.2)
При відсутності викривлень коду результуючий код (синдром) С=000. Причому двійковий код синдрому, переведений у десяткову форму, вказує на номер розряду, у якому було виявлено помилку. В іншому разі приймається рішення про помилку і виправлення інформаційної складової прийнятого коду.
Кодова послідовність, що передавалась
1 1 0 0 1 1 0
Оскільки відбулася помилка у 6-му розряді, то була прийнята послідовність
1 0 0 0 1 1 0
Для отримання коду синдрому С необхідно помножити отриманий код Z на на перевірочну матрицю H.

Отримаємо: С=110
Це свідчить про те, що у прийнятій кодовій послідовності була виявлена помилка у 6-му розряді.
Виправляємо помилку і отримуємо: 1 1 0 0 1 1 0
Оскільки розряди з номерами 3, 5, 6, 7 є інформаційними, то прийнятий код 1 1 0 1
Функціональна схема декодера завадостійкого коду зображена на рисунку 7.1

Рисунок 7.1 – функціональна схема декодера завадостійкого коду
Ймовірність помилкового прийому при використанні перешкодостійкого коду Хеммінга з виправленням однократної помилки:
 (7.3) (7.3)
8. Аналіз отриманих результатів розрахунку
У даній курсовій роботі було розраховано основні структурні елементи цифрової системи передачі інформації. А саме: джерело повідомлень, кодер джерела, кодер каналу, модулятор, канал зв’язку, демодулятор і декодер.
Побудовано графік одномірної щільності ймовірності миттєвих значень повідомлення, знайдено дисперсію та середньоквадратичну похибку повідомлення. Побудовано графік випадкового процесу.
При розрахунку кодера джерела визначено інтервал дискретизації повідомлення за часом. Розраховано середню потужність шуму квантування та інші параметри потужності сигналу. Знайдено розрядність вихідної кодової комбінації та записано відповідні двійкові комбінації. Визначено ентропію джерела дискретних повідомлень, продуктивність кодера та тривалість символів двійкового коду.
Далі було здійснено кодування відповідної двійкової комбінації кодом Хемінга, визначено надмірність отриманого завадостійкого коду.
Було здійснено модуляцію сигналу, зображено часові діаграми модулюючого та модульованого сигналів. Визначено ширини енергетичних спектрів цих сигналів і позначено відповідні величини на графіках.
Передача повідомлення відбувалася по каналу з адитивним флуктуаційним Гаусівським шумом з рівномірним енергетичним спектром. Відповідно до цього було визначено параметри каналу зв’язку, визначено ефективність використання пропускної здатності каналу.
У демодуляторі здійснено обробку прийнятого сигналу, обчислено ймовірність помилки та проведено порівняння з іншими видами модуляції.
Було здійснено процес декодування, під час якого було виявлено та виправлено помилку. Визначено ймовірність не виявлення помилки.
Висновки за результатами аналізу:
1. Джерело повідомлень формує повідомлення, що представляє собою безперервний стаціонарний випадковий процес.
2. Кількість рівнів квантування визначає розрядність АЦП. Для АЦП у даній курсовій роботі ставляться невисокі вимоги, оскільки необхідна його розрядність є невеликою.
3. За допомогою завадостійкого кодування кодом Хемінга можливо закодувати повідомлення, що передається, та зменшити цим самим вплив завад на нього при передачі.
4. Обраний модулятор має просту структуру та добре справляється із своєю задачею модуляції гармонійного переносника.
5. Ефективність використання пропускної здатності каналу у даній курсовій роботі складає лише 5,1%. Це значить, що канал може використовуватись ефективніше.
6. Частотна модуляція дещо програє амплітудній і фазовій при заданому способі прийому.
7. Оскільки передане повідомлення було закодовано кодом Хемінга, то на етапі декодування можливо виявити та виправити однократну помилку у прийнятій кодовій комбінації.
Висновки
Теорія і техніка передачі інформації складалися протягом багатьох років і в теперішній час продовжують швидко розвиватися. Особливе місце системи передачі інформації займають в автоматизованих системах управління, в яких необхідно забезпечувати передачу досить великих потоків інформації з високою швидкістю, вірністю та надійністю.
Сучасна теорія передачі інформації дозволяє досить повно оцінити різні системи зв’язку щодо їх перешкодостійкості і ефективності і тим самим визначити, які з цих систем є найбільш перспективними. Теорія досить чітко вказує не тільки шляхи удосконалення існуючих систем зв’язку, але і шляхи створення нових, більш досконалих систем.
Перелік посилань
1. Основи теорії передачі інформації, О.О. Панчук, О.Г. Мішин, О.І. Лошінов, Житомир 2004.
2. Основи теорії передачі інформації частина 2 (основи теорії інформації та кодування), В.П. Сіденко, ЖВІНАУ 2002.
3. Основи теорії передачі інформації частина 2 (методи передачі інформації), Р.А. Андрощук, С.В. Петраш, О.Є. Леонтьєв, Житомир 2006.
4. Цифрове оброблення сигналів, А.С. Глинченко, Красноярськ 2001.
|