| КУРСОВОЙ ПРОЕКТ
по предмету:
«Электрооборудование промышленных предприятий»
учащегося гр. МиЭЭ-74/а.06/4
Рында М.Ю.
2010 Введение
Крановое электрооборудование является одним из основных средств комплексной механизации всех отраслей народного хозяйства. Подавляющее большинство грузоподъемных машин изготовляемых отечественной промышленностью, имеет привод основных рабочих механизмов, и поэтому действия этих машин в значительной степени зависит от качественных показателей используемого кранового оборудования.Перемещение грузов, связанное с грузоподъемными операциями, во всех отраслях народного хозяйства, на транспорте и в строительстве осуществляется разнообразными грузоподъемными машинами.Грузоподъемные машины служат для погрузочно-разгрузочных работ, перемещения грузов в технологической цепи производства или строительства и выполнения ремонтно-монтажных работ с крупногабаритными агрегатами. Грузоподъемные машины с электрическими приводами имеют чрезвычайно широкий диапазон использования, что характеризуется интервалом мощностей приводов от сотен ватт до 1000кВт. В перспективе мощности крановых механизмов может дойти до 1500 –2500 кВт.Мостовые краны в зависимости от назначения и характера выполняемой работы снабжают различными грузозахватными приспособлениями: крюками, грейферами, специальными захватами и т.п. Мостовой кран весьма удобен для использования, так как благодаря перемещению по крановым путям, располагаемым в верхней части цеха, он не занимает полезной площади.Электропривод большинства грузоподъёмных машин характеризуется повторно-кратковременном режимом работы при большей частоте включения, широком диапазоне регулирования скорости и постоянно возникающих значительных перегрузках при разгоне и торможении механизмов. Особые условия использования электропривода в грузоподъёмных машинах явились основой для создания специальных серий электрических двигателей и аппаратов кранового исполнения. В настоящее время крановое электрооборудование имеет в своём составе серии крановых электродвигателей переменного и постоянного тока, серии силовых и магнитных контроллеров, командоконтроллеров, кнопочных постов, конечных выключателей, тормозных электромагнитов и электрогидравлических толкателей, пускотормозных резисторов и ряд других аппаратов, комплектующих разные крановые электроприводы.В крановом электроприводе начали довольно широко применять различные системы тиристорного регулирования и дистанционного управления по радио каналу или одному проводу.В настоящее время грузоподъемные машины выпускаются большим числом заводов. Эти машины используются во многих отраслях народного хозяйства в металлургии, строительстве, при добыче полезных ископаемых, машиностроении, транспорте, и в других отраслях. 1. Техническая часть
1.1 Техническая характеристика технологической установки
Кран грузоподъемный - Грузоподъемная машина, оснащенная стационарно установленными грузоподъемными механизмами.
Подъёмный кран предназначен для подъёма и перемещения грузов при проведении строительных, монтажных, ремонтных, погрузочно — разгрузочных и других работ.Содержание
Классификация подъёмных кранов по конструкции
Грузоподъёмные краны по конструкции можно разделить на следующие основные типы:
Стреловые краны
Грузозахватный орган подвешен к стреле или тележке перемещающейся по стреле. К ним относятся башенные, портальные, полупортальные, стреловые краны и др.
Краны мостового типа
Несущая конструкция имеет вид моста с передвигающейся по ней тележкой или электроталью. К ним относятся мостовые, козловые, полукозловые, консольные краны, мостовые перегружатели и др.
Краны с несущими канатами
Грузозахватный орган, подвешен к грузовой тележке, перемещающейся по несущим канатам, закрепленным в опорах.
Краны штабелёры
Грузоподъемные краны, оборудованные вертикальной колонной с перемещающимся по ней устройством для штабелирования грузов.
Область применения мостовых кранов.
Кран мостовой: относится к типовому оборудованию производств цехов, электростанций, закрытых и открытых складов. Грузоподъёмность его достигает 500—600 т., пролёты (расстояния между осями подкрановых рельсов) — 50 — 60 м. Возможная высота крана (высота подъёма груза) — 40 — 50 м и в специальном исполнении до 500 м; скорость движения моста (рабочее движение) — 30 — 160 м/мин, грузовой тележки — 10 — 60 м/мин, подъёма груза до 60 м/мин.
К мостовым кранам общего назначения относят крюковые, магнитные, грейферные и магнитно-грейферные краны.
Краны характеризуются тяжелыми условиями работы сопровождающиеся большим числом включений в час. Кроме этого электрооборудование мостовых кранов обычно находится в условиях тряски, высокой влажности воздуха, резких колебаний температуры и запыленности помещений. В связи с этим на кранах применяется специальное электрооборудование, приспособленное к условиям работы кранов и отличающееся повышенной надежностью.
Исходные данные для расчета:
Грузоподъемность, т
M=46 т= 46∙103
кг.
Масса крюка с подвеской, т
M0
=3.8 т= 3.8∙103
кг.
Высота подъема груза, м
H=12 м
Скорость подъема крюка, м/мин
v=8 м/мин
КПД подъёмного механизма
КПД=0.82
Время остановки
t0
=2 мин
Произведем перевод исходных данных в систему СИ
Сила тяжести подымаемого груза, Н
G=gM=9,8∙46∙103
=450.8∙103
H
Сила тяжести грузозахватывающего устройства, Н
G0
=gM0
=9,8∙3.8∙103
=37.24∙103
H
Скорость подъема крюка, м/с
v=8/60=0,133 м/с
Время прохождения операции, с
t0
=4∙60=360 с
1.2
Требования к электроприводу и системе управления и сигнализации
Для выбора системы электропривода необходимо четко представлять себе технологические требования к приводу того механизма, для которого он выбирается. Установление таких требований облегчает выбор оптимальной системы электропривода, т. е. такой, которая наиболее проста и дешева из всех систем, обеспечивающих желаемые эксплуатационные показатели механизма.
Для качественного выполнения подъема, спуска и перемещения грузов электропривод крановых механизмов должен удовлетворять следующим основным требованиям:
1. Регулирование угловой скорости двигателя в сравнительно широких пределах (для обычных кранов – до 4: 1, для специальных кранов — до 10: 1 и более) в связи с тем, что тяжелые грузы целесообразно перемещать с меньшей скоростью, а пустой крюк или ненагруженную тележку — с большей скоростью для увеличения производительности крана. Пониженные скорости необходимы также для осуществления точной остановки транспортируемых грузов с целью ограничения ударов при их посадке и облегчают работу оператора, так как не требуют много кратного повторения пусков для снижения средней скорости привода перед остановкой механизма.
2. Обеспечение необходимой жесткости механических характеристик привода, особенно регулировочных, с тем чтобы низкие скорости почти не зависели от груза.
3. Ограничение ускорений до допустимых пределов при минимальной длительности переходных процессов. Первое условие связано с ослаблением ударов в механических передачах при выборе зазора, с предотвращением пробуксовки ходовых колес тележек и мостов, с уменьшением раскачивания подвешенного на канатах груза при интенсивном разгоне и резком торможении механизмов передвижения; второе условие необходимо для обеспечения высокой производительности крана.
4. Реверсирование электропривода и обеспечение его работы как в двигательном, так и в тормозном режиме.
Цепи управления и сигнализации стараются выполнять на малые токи и напряжения, так как это значительно снижает стоимость аппаратуры цепи управления и сигнализации (в частности в качестве датчиков широко применяются оптопары, с помощь которых производят разделение цепей), а также значительно повышается надежность и долговечность. Основное требование предъявляемое к цепи управления - это конечно же ее безотказность и надежность. Остальные критерии выбора определяются спецификой эксплуатации кранового оборудования
1.3
Выбор типа электропривода и величины питающих напряжений
Выбор рода тока для электрооборудования расточного станка имеет важное значение, поскольку с ним связаны такие показатели, как технические возможности привода, капиталовложения и стоимость эксплуатационных расходов, масса и размеры оборудования, его надежность и простота обслуживания.
Распределение энергии в электрических сетях производится трехфазным переменным током 50 Гц номинальное напряжение, которого устанавливается ГОСТом. Однако отдельные электроприемники приводятся в движение высокочастотными электродвигателями, которые должны питаться токами повышенной частоты 180-400 Гц. Установки индукционного и диэлектрического нагрева требуют питания токами повышенных и высоких частот до 10000 Гц и выше.
Сети напряжением до 1000 В служат для распределения электроэнергии внутри цехов промышленных предприятий, а так же для питания некоторых электроприемников, расположенных за пределами цеха на территории предприятия.
Для внутрицеховых сетей наибольшее распространение имеет напряжение 380/220 В, основным преимуществом которого является возможность совместного питания силовых и осветительных сетей, а так же снижение потерь энергии в цеховых электрических сетях.
Напряжение 660 В целесообразно применять на тех предприятиях, на которых по условиям планировки цехового оборудования, технологии производства и окружающей среды нельзя или трудно приблизить цеховые трансформаторные подстанции (ТП) к электроприемникам, например, химическая промышленность, нефтеперерабатывающая промышленность, угольные шахты и т. п.
Трехфазная система 220/127 В является малоэкономичной поэтому не используется для вновь проектируемых предприятий. Напряжения не выше 42 В (24 В, 36 В) применяют в помещениях с повышений опасностью и особо опасных для местного освещения и ручных переносных ламп.
Напряжение 12 В применяется при особо неблагоприятных условиях в отношении опасности поражения электрическим током для питания переносных светильников.
По роду тока все потребители электроэнергии можно разделить на три группы: работающие от сети переменного тока нормальной промышленной частоты (50 Гц), работающие от сети переменного тока повышенной или пониженной частоты и работающие от сети постоянного тока.
На данном станке применяется электрооборудование силовая часть и цепь управления работает на постоянным током 220 В.
Для привода расточного станка возможно применение различных двигателей и систем электропривода. Их выбор определяется грузоподъемностью, номинальной скоростью движения, требуемым диапазоном регулирования скорости привода, жесткостью механических характеристик, числом включения в час и др. В настоящее время на кранах чаще всего применяют простые системы электропривода, в которых двигатели получают питание от сети переменного или постоянного тока неизменного напряжения через пускорегулировочные резисторы.
Привод с асинхронными двигателями с к.з. ротором применяется для механизмов кранов небольшой мощности (≤10—15 кВт), работающих в легком режиме. Если необходимо регулировать скорость или обеспечить точную остановку механизма, то можно использовать двух или трехскоростные двигатели.
Наибольшее распространение на кранах получил привод с асинхронными двигателями с фазным ротором и ступенчатым регулированием угловой скорости путем изменения сопротивления в цепи ротора. Такой привод достаточно прост, надежен, допускает большое число включений в час и применяется при средних и больших мощностях. С помощью резисторов в цепи ротора можно в широких пределах изменять момент при пуске, получать желаемые ускорения и плавность
пуска, уменьшать токи и потери энергии в двигателе при переходных процессах, а также получать пониженные угловые скорости. Однако этот привод не обеспечивает необходимую жесткость регулировочных характеристик и устойчивую работу при пониженных скоростях. Он неэкономичен вследствие значительных потерь энергии в пускорегулировочных сопротивлениях; кроме того, имеет место повышенный износ двигателя, электромеханических тормозов и контактной аппаратуры управления.
Если к электроприводу крановых механизмов предъявляются повышенные требования в отношении регулирования скорости, а также необходимо обеспечить низкие устойчивые угловые скорости в различных режимах, то применяют двигатели постоянного тока. Для механизмов подъема приводы на постоянном токе с питанием от сети обычно выполняются с двигателями последовательного возбуждения, которые допускают большие перегрузки по моменту и имеют мягкую естественную характеристику, что позволяет поднимать попускать легкие грузы с повышенной скоростью. Двигатели параллельного возбуждения применяют в тех случаях, когда необходимо иметь достаточно жесткие механические характеристики при низких угловых скоростях, а также обеспечить работу двигателя на естественной характеристике в генераторном режиме.
Однако использование двигателей постоянного тока влечет за собой необходимость преобразования переменного тока в постоянный, что до недавнего времени осуществлялось с помощью машинных преобразователей и связано с увеличением капитальных затрат, дополнительными потерями энергии и эксплуатационными расходами.
На кранах получили некоторое распространение также и сложные системы электроприводов с асинхронными двигателями: с вихревым тормозным генератором, с дросселями насыщения, двухдвигательный привод с регулированием скорости путем наложения механических характеристик и др.
С развитием силовой полупроводниковой техники открываются новые возможности применения двигателей постоянного и переменного тока в электроприводах крановых механизмов с питанием от тиристорных преобразователей, устанавливаемых непосредственно на кранах и подключаемых к сети переменного тока. Эти преобразователи имеют высокие энергетические и экономические показатели, повышенную механическую прочность и. долговечность, нетребовательны в эксплуатации.
На данном кране применяется асинхронный двигатель с фазным ротором, что видно на принципиальной электрической схеме.
1.4 Расчёт мощности и выбор приводного электродвигателя
Электродвигатели кранов работают в тяжелых условиях (ударная нагрузка, значительные перегрузки, повторно-кратковременный режим работы с частыми пусками и реверсами и т. д.), поэтому к ним предъявляют особые требования в отношении надежности и удобства эксплуатации. Для привода механизмов кранов выпускаются специальные крановые двигатели повторно-кратковременного режима, отличающиеся от двигателей общего применения повышенной прочностью конструкции, увеличенной перегрузочной способностью, более нагревостойкой изоляцией и меньшим моментом инерции ротора за счет уменьшения его диаметра и увеличения длины. Основное конструктивное исполнение крановых двигателей — закрытое, с горизонтальным валом, на лапах.
Основным (номинальным) режимом работы крановых двигателей является режим при ПВном
=40%. В справочной литературе приводятся данные и для режимов при ПВ, равном 15, 40, 60 и 100%.
Произведем расчёт мощности и выбор приводного электродвигателя
По формуле 1.1 определяем мощность развиваемую двигателем при силовом подъёме кВт
P1
=((G+G0
)ν/η)*10-3
(1.1)
По формуле 1.2 определяем мощность развиваемую двигателем при силовом спуске, кВт:
Где:
G0
– сила тяжести поднимаемого груза, Н.
P2
=(G+G0
)ν(2-1/η))*10-3
(1.2)
По формуле 1.3 определяем статическую мощность при подъёме пустого крюка (грузозахватывающего устройства), кВт:
P3
=(G0
ν/η)*10-3
(1.3)
Где:
G0
– сила тяжести грузозахватывающего устройства, Н;
ν – скорость подъёма крюка;
η – общий КПД подъёмного механизма.
По формуле 1.4определяем статическую мощность при отпускании крюка (грузозахватывающего устройства), кВт:
P4
=G0
ν(1/η-2)*10-3
(1.4)
По формуле 1.5 определяем время работы двигателя, с
tp1
=tp2
=tp3
=tp4
=H/ν(2.5)
Где:
H – высота подъёма груза, м
По формуле 1.6 определяем эквивалентную мощность двигателя, кВт
Pэк
=√P1
2tp1
+P2
2tp2
+P3
2tp3
+P4
2tp4
/tp1
+tp2
+tp3
+tp4
+t01
+t02
+t03
+t04
(1.6)
По формуле 2.7 определяем продолжительность включения, %:
ПВрас
=∑tp
/tц
*100% (1.7)
Где:
tц
– время цикла, сек.
По формуле 2.8 приводим мощность двигателя к ПВ стандартному, кВт:
Pдв
=Pэкв
√ПВрас
/ПВст
(1.8)
Производим расчёт мощности двигателя:
Мощность, развиваемая двигателем при силовом подъёме кВт
P1
=((450,8+37,24)*0,117)/0,82=77,37 кВт
Мощность, развиваемая двигателем при силовом спуске, кВт:
P2
=(450,8+37,24)* 0,13 (2-1/0,82))=49,5 кВт
Статическая мощность при подъёме пустого крюка (грузозахватывающего устройства), кВт:
P3
=37,24* 0,13/0,82=5,9 кВт
Статическая мощность при отпускании крюка (грузозахватывающего устройства), кВт:
P4
=37,24* 0,13 (1/0,82-2)=-3,8 кВт
Рабочее время, с
tp
=H/v=12/0,13=90 с
Время одного цикла, с
tц
= 4(to
+ tp
)=1320 с
Продолжительность включения
ПВ=(∑ tp
/ tц
)*100%=(4*90/1320)*100%=27%
По полученным данным строим нагрузочную диаграмму цикла работы
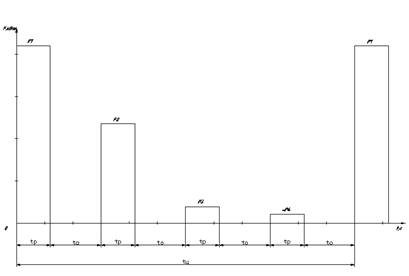
Рис 1. нагрузочная диаграмма
Далее определяем Рэкв
и Рдв
Рэкв
=√((77,37 2
+49,52
+5,92
+3,82
)*90)/1320=64 кВт
Рдв
=64 √27/40=50 кВт
Выбираем двигатель по каталогу
Тип: 4А200М6У3
Номинальная мощность Рн
=40 кВт
Номинальное напряжение Uн
=380В
Сosφ=0.93
КПД η=89%
Номинальная частота вращения nн
=1500 об/мин
Ммax
/ Мном
=2
Iп
/ Iном
=7
1.5 Проверка выбранного электродвигателя
Проверку выбранного электродвигателя по перегрузочной способности производится по следующему принципу.
Определяем номинальный момент на валу двигателя
Mном
=9550*Pном
/nн
=9550*40/1000=254 кH*м
Определяем пусковой момент
Mп
=Мном
*2=254*2=502 кH*м
Проверка выбранного электродвигателя происходит в наиболее нагруженном режиме. Наибольший момент сопротивления составляет
Mc max
=9550*Pmax
/nн
=9550*77,37/1500=492,58 кH*м
Так как пусковой момент двигателя больше, чем максимальный момент сопротивления
Мmax
=502кH*м >Мc max
=492,58 кH*м то двигатель выбран верно.
2. Описание принципиальной электрической схемы
На первом листе чертежа приведена схема электропривода подъема с кулачковым контролером ККТ65 панелью управления ТСД
Эти электроприводы выполняются только для механизмов подъема, и их применение целесообразно во всех случаях, когда предъявляются повышенные требования к регулированию новых механизмов механизмов с приводом переменного тока. Комплектные электроприводы охватывают все крановые асинхронные двигатели с фазным рото-vnoaeгении от кулачковых контроллеров ККТ65 в комплекте с панелью управления трд160 и панелями управления ТСД. Эти электроприводы выпускаются только для механизмов общего назначения. Для крановых механизмов металлургического производства выпускается специальная серия электроприводов, рассматриваемых в § 8.4, с режимом динамического торможения самовозбуждением и тиристорными узлами бездуговой коммутации.
Электроприводы с силовыми контроллерами имеют мощность привода от II до 30 кВт, а с панелями управления — от 11 До 150 кВт в режиме работы 4М при ПВ = 40 %: Электроприводы с кулачковыми контроллерами имеют отдельную панель защиты, электроприводы с панелями управления имеют только индивидуальную защиту. Панели управления по построению схемы выпускаются двух типов соответственно для возбуждаемых и невозбуждаемых электродвигателей. Первые из этих панелей применяются для двигателей, напряжение на кольцах ротора которых не превосходит 300 В при навряженин сети 380 В, вторые — при напряжении ротора свыше 300 В. Применение режима динамического торможения самовозбуждением позволяет получить устойчивые посадочные скорости при диапазоне регулирования до 4:1 в системе с кулачковыми контроллерами и до 8:1 — с панелями управления. Эквивалентный КПД привода в режиме 4М до 75 %. Следует также отметить, что, обладая повышенными регулировочными и энергетическими свойствами, рассматриваемые, электроприводы позволяют значительно улучшить использование двигателей и повысить надежность работы контакторной аппаратуры благодаря снижению числа включений привода при осуществлении доводочных операций.
Схемы электроприводов. Схема электропривода с силовым "кулачковым контроллером ККТ65 и дополнительной панелью ТРД160 приведена на рис.
8.15, а соответствующие ей механические характеристики — на рис. 8.16. Такой электропривод применяется только для возбуждаемых двигателей. В схеме контакты кулачкового контроллера SMI—SM12 обеспечивают реверс двигателя, регулирование сопротивлений, управление реленно-контактор-ной аппаратурой, вынесенной на панель ТРД, и аппаратами защиты на защитной панели. На панели ТРД расположены: выпрямительный блок UZt
механически сблокированные контакторы силовой КМ1 и динамического торможения КМ2, контактор ускорения KMV с реле времени, реле контроля КН и КТ2, а также диоды, необходимые для подпитки статора двигателя постоянным током в целях обеспечения начального возбуждения и питания реле. Защитная панель та же, что и для систем с противовключе-нием, и состоит из линейного контактора КММ, силового рубильника 5, блока максимальных реле КЛ и предохранителей цепи управления.
В режиме подъема схема работает аналогично схеме с контролером ККТ61,соответственно одинаковы и механические характеристики. В направлении спуска на позициях 1с-4сдинамического торможения самовозбуждения, при этом в статоре двигателя включаем контактор КМ2 подается выпрямленный выпрямителем UZ ток ротора,и осуществляется подпитка обмоток статора выпрямляемым током для начального возбуждения двигателя. Подпитка осуществляется по цепи: сеть, две фазы двигателя,контакт контактора КМ2,вывод 3,размыкающий контакт КМ1,резистор, диод,реле КТ2.Реле КН осуществляет с помощью разделительных диодов V1-2 контороль моста УЗ, получая питание от сети через выводы 1 и 2 и срабатывая при пробое любого из силовых диодов. Тормозной электромагнит YA подключен непосредственно за контактами реверса контролера.
Механические характеристики данного привода приведены ниже

3. Выбор элементов системы электропривода
Для данной схемы произведем выбор контакторов, аппаратуры защиты а также командоаппаратов, руководствуясь положениями, принятыми выше:
Силовая цепь
Тип тока: переменный
Напряжение линейное: 380 В.
Цепь управления
Тип тока: постоянный (5А)
Напряжение: 220В.
Выбор производим по условия. Все элементы выбираем по каталогу По окончании выбора все данные заносим в сводную таблицу.
3.1 Выбор контакторов и магнитных пускателей
К пусковой аппаратуре относятся магнитные пускатели. Они предназначены главным образом для дистанционного управления асинхронными двигателями с короткозамкнутым ротором мощностью до 100 кВт; для пуска непосредственным подключением к сети и останова электродвигателя (нереверсивные пускатели); для пуска, останова и реверса электродвигателя (реверсивные пускатели). Часто магнитные пускатели поставляют в комплекте с тепловым реле, что позволяет одновременно защитить электродвигатель от перегрузок.
Магнитный пускатель представляет собой трехполюсный контактор переменного тока с прямоходовой магнитной системой, в который дополнительно встроены два тепловых реле защиты.
Выбор магнитных пускателей осуществляется по номинальному току электродвигателя. Расчёт номинального тока производим по формуле 3.1:
 (3.1) (3.1)
Где:
Iн
– номинальный ток электродвигателя;
Рн
– номинальная мощность электродвигателя;
U – напряжение питающей сети;
cosφ - коэффициент мощности данного электродвигателя;
η – коэффициент полезного действия двигателя.
Производим расчёт по формуле (3.1):
Iн
=40000/(√3*380*0,89*0,93)=73.5 А
Выберем магнитный пускатель в комплекте с тепловым реле
ПМЛ – 510004 Iн
=80 А РТЛ - 206304 Iн
=80 А
Таблица 3.1 Выбор магнитных пускателей
| Поз. обозначение
Тип
|
Род тока нагрузки
|
Напряжение главных контактов, В
|
Ток главных контактов, А
|
Число главных контактов, зам./разм.
|
Число вспомогательных контактов, зам/разм
|
Род тока катушки
|
Напряжение катушки, В
|
Мощность катушки, пуск/ном, В·А (Вт)
|
Наличие теплового реле
|
Конструктивное исполнение
|
Способ монтажа
|
Габариты, мм
|
| KM
|
Треб.
|
Переменный
|
380
|
73.5
|
3
|
2/2
|
Постоянный
|
220
|
1100
|
+
|
IP54
|
Верт.
|
75x127x107
|
| Выбр.
|
Переменный
|
380
|
80
|
3
|
2/2
|
Постоянный
|
220
|
1100
|
+
|
IP54
|
Верт.
|
Аналогично производим выбор других магнитных пускателей
3.2 Выбор аппаратов защиты
Для защиты электрических цепей от действия токов короткого замыкания используются плавкие предохранители или автоматические выключатели. Данные аппараты служат для отключения поврежденных элементов сети электроснабжения при возникновении коротких замыканий в них. Также защитные аппараты должны обеспечивать селективность, то есть свойство аппаратов реагировать на повреждение и отключать поврежденный элемент сети ближайшим аппаратом. Это означает, что отключается только поврежденный элемент, а остальные продолжают работать.
Предохранители являются простейшими аппаратами токовой защиты, действие которых основано на перегорании плавкой вставки. Предохранитель включают последовательно в фазу защищаемой цепи. Их применяют для защит от токов коротких замыканий (К.З.). защита от перегрузок с помощью предохранителей возможна только при условии, что защищаемые элементы установки будут выбраны с запасом по току, превышающем примерно на 25% номинальный ток плавких вставок.
Плавкие вставки предохранителей выдерживают токи на 30-50% выше номинальных токов в течении 1ч. и более. При токах, превышающих номинальный ток плавких вставок на 60-100%, они плавятся за время, меньшее 1ч.
Наибольшее распространение для защиты внутрицеховых сетей до 1000 В получили предохранители НПН-60 – насыпной предохранитель неразборный; ПР2 – предохранитель разборный; ПН2 – предохранитель насыпной разборный. По конструктивному выполнению предохранители можно разделить на две группы: с наполнителем (ПН2, НПН, ПП17 и др.), наполненные мелкозернистым кварцевым песком; без наполнителя (ПР2). Основные предохранители рассчитаны на номинальные токи 15 – 1000 А
Автоматические выключатели предназначены для автоматического размыкания цепей при ненормальных режимах (К.З., перегрузках), для редких оперативных переключений (3 – 5 в час) при нормальных режимах, а также при недопустимых снижениях напряжения, заменяют рубильники и предохранители. По сравнению с предохранителями автоматические выключатели обладают рядом преимуществ: после срабатывания автоматический выключатель снова готов к работе, в то время как в предохранителе требуется замена калиброванной плавкой вставки, что увеличивает время простоя электроприемника; у автоматических выключателей более точные защитные характеристики; они совмещают функцию коммутации и защиты электрической цепи; некоторые автоматические выключатели выпускают с независимым расцепителем, позволяющим осуществить дистанционное отключение электросети и др. функции.
Для защиты от коротких замыканий применяют электромагнитные расцепители мгновенного действия или с выдержкой времени, обеспечивающей избирательность действия. одновременная защита цепи от К.З. и от перегрузки осуществляется за счет применения комбинированных расцепителей, состоящих из двух элементов, один защищает от К.З., а другой – от перегрузок.
Для защиты питающих проводов и электродвигателей от токов к. з. и значительных перегрузок (свыше 225%) на кранах предусматривается максимальная токовая защита с помощью реле максимального тока или автоматических выключателей. Плавкие предохранители используют только для защиты цепей управления. Тепловая защита на кранах обычно не применяется, так как в условиях повторно-кратковременного режима работы двигателей она может приводить к ложным отключениям.
Приведем методику расчета необходимой аппаратуры защиты:
Выбор автоматических выключателей производим по наибольшему из условий:

где Iн а
– номинальный ток автоматического выключателя, Iн р
– номинальный ток расцепителя, Iдл
– длительный ток электроприемника (для двигателей равен их номинальному току).
Величину номинального тока для двигателей можно определить, зная его активную мощность, коэффициент мощности, к.п.д. и величину питающего напряжения:
 (3.3) (3.3)
где Рн
– номинальная мощность электродвигателя, U
– напряжение питающей сети, cosφ
- коэффициент мощности данного электродвигателя, η
– коэффициент полезного действия двигателя. Величины cosφ
и η
определяются по справочной литературе в зависимости от активной мощности двигателя. Следует отметить, что если станок многодвигательный, то величина Iдл
определяется по формуле
Iдл
=∑Iн
(3.4)
где ∑Iн
– сумма номинальных токов всех двигателей станка.
По расчетному току выбираем автоматический выключатель. Далее необходимо произвести проверку н невозможность срабатывания выключателя во время пуска по формуле:
Iср
≥1,25.
Iкр
(3.5)
где Iср
– ток срабатывания автоматического выключателя, Iкр
– кратковременный ток, для однодвигательных станков равен пусковому току, определяемому по формуле:

(3.6)
где Iп
– пусковой ток двигателя, Iп
/Iн
– отношение называемое пусковым коэффициентом, показывает во сколько раз пусковой ток превышает номинальный.
 Если станок многодвигательный, то значение кратковременного тока будет определятся по формуле: Если станок многодвигательный, то значение кратковременного тока будет определятся по формуле:
Iкр
=Iн мах
+∑I′н
(3.7)
где Iн мах
– максимальный номинальный ток, то есть наибольший ток в защищаемых группе двигателей, ∑I′н
– сумма оставшихся номинальных токов.
По расчетному току производим выбор автоматического выключателя по условию выбора (3.2), пользуясь справочной литературой (Л.3, стр.452,табл.8,21). Выбираем автоматический выключатель:
A3740 630/630
После можно определить пусковой ток, равный для однодвигательных станков кратковременному, по формуле (3.6):
Iп
=Iн
.
(Iп
/Iн
)=7.
73,5=510 А
;
Теперь проверим выбранный выключатель по невозможности срабатывания при пуске по условию (3.5):
Iср
≥1,25. 510=629 А
630 А > 629 А
Так как условие выполняется, то выбранный автоматический выключатель подходит по всем условиям.
Таблица 3.2 – Выбор автоматических выключателей
| Поз.
обозначение,
тип
|
Вид расцепителя
|
Род тока цепи
|
Число полюсов
|
Напряжение цепи, В
|
Ток расцепителя, А
|
Ток автоматического выключателя, А
|
Ток срабатывания (уставки), А
|
Число и род дополнительных контактов, зам/разм
|
Габариты, мм
|
| QF
|
Треб.
|
Эл.м.
|
~
|
3
|
380
|
510
|
629
|
6300
|
1/1
|
225x
400x
X160
|
| Выбр.
|
Эл.м.
|
~
|
3
|
380
|
630
|
630
|
6300
|
1/1
|
Аналогично производим расчет и для других участков цепи
3.3 Выбор командоаппаратов
Командными называются аппараты ручного управления, с помощью которых подаются команды на включение, переключение, регулировку скорости и отключение. К командным аппаратам относят кнопки управления, конечные выключатели, тумблеры и переключатели.
Кнопочные выключатели выбирают по следующим условиям:
1) току и напряжению контактов;
2) числу и роду контактов;
3) конструктивному исполнению, цвету и виду толкателя.
Конечные выключатели выбирают исходя из:
1) тока и напряжения контактов;
2) числа и рода контактов;
3) вида движения и величины хода толкателя;
4) конструктивного исполнения по степени защиты от воздействия окружающей среды.
Переключатели выбирают по следующим условиям:
1) току и напряжению контактов;
2) числу полюсов и позиций, диаграмме коммутации;
3) конструктивному исполнению.
Результаты выбора помещают в соответствующую таблицу
Таблица 3.3– Выбор кнопочных выключателей
| Поз. обозначение,
Тип
|
Ток контактов, А
|
Напряжение контактов, В
|
Число контактов, зам./разм.
|
Вид толкателя
|
Цвет толкателя
|
Степень защиты
|
| S
|
Треб.
|
5
|
220
|
1/1
|
Штырьковый
|
Белый
|
IP54
|
| Выбр.
|
5
|
220
|
1/1
|
Штырьковый
|
Белый
|
IP54
|
Таблица 3.4 – Выбор конечных выключателей
| Поз. обозначение, тип
|
Ток контактов, А
|
Напряжение контактов, В
|
Число контактов зам./разм.
|
Ход толкателя, мм
|
Степень защиты
|
| SQ
|
Треб.
|
5
|
220
|
1/1
|
51
|
IP54
|
| Выбр.
|
5
|
250
|
1/1
|
51
|
IP54
|
Таблица 3.5 – Выбор переключателей
| Поз. обозначение, тип
|
Ток контактов, А
|
Напряжение контактов,
В
|
Число полюсов
|
Число позиций
|
Исполнение по виду рукоятки
|
Степень защиты
|
| SA
|
Треб.
|
5
|
220
|
1
|
9
|
С центральной рукояткой
|
IP54
|
| Выбр.
|
5
|
220
|
1
|
9
|
С центральной рукояткой
|
IP54
|
4. Составление монтажной схемы
Составление монтажной схемы выполняется по принципиальной электрической схеме и эскизу размещения электрооборудования. При этом применяют ту же маркировку и условные обозначения, что и на принципиальной схеме.
При составлении монтажной схемы соблюдают следующие правила:
1. Коммутирующие аппараты размещают на уровне предплечья, с целью улучшения эргономики.
2. Аппараты тепловой защиты (тепловые реле) размещают внизу, с целью предотвращения ложного срабатывания при выделении тепла со стороны других аппаратов.
3. Присоединение проводов производится только к зажимам аппаратов, электрических машин, приборов или к наборам внешних зажимом (клеммников).
4. К одному зажиму рекомендуется присоединять не более двух проводов; при наличии большого числа проводов рекомендуется применять сдвоенные зажимы.
5. В пределах одной панели все разветвления проводов между аппаратами рекомендуется делать на зажимах аппаратов и не применять промежуточные зажимы.
6. Совершенно не допускается соединения проводов помимо зажимов, например, путем скрутки или пайки.
На схемах соединений провода идущие от наборов зажимов или от аппаратов в одном направлении, можно изображать двумя способами: либо объединять в пучки и показывать эти пучки на схеме одной толстой линией, либо каждый провод показывать отдельно.
5. Выбор типа и сечения проводов и кабелей
Области применения кабелей и проводов должны соответствовать требованиям стандартов и технических условий на кабели и провода, а также правил устройства электроустановок.
Допускается использовать контрольные кабели для подключения до двух электроприёмников напряжением до 1 кВ и мощностью до 10 кВт, относящихся к одному агрегату или одной технологической линии.
Для присоединения к неподвижным электроприёмникам, как правило, следует применять кабели и провода с алюминиевыми жилами. Кабели и провода с медными жилами следует применять для присоединения к переносным, передвижным и установленным на виброизолирующих опорах электроприёмникам, а также в случаях, оговоренных ПУЭ. Кабели и провода, присоединяемые к переносным, передвижным и установленным на виброизолирующих опорах электроприёмникам, должны быть гибкими.
Электропроводки станков и машин выполняют проводами и кабелями преимущественно в полихлорвиниловой изоляции. Согласно общим техническим условиям для проводок станков и машин могут применяться медные провода сечением не менее 1 мм2
, и лишь в цепях усилительных устройств разрешается применять непосредственно на станках и машинах провода сечением 0,75 мм2
, а на панелях и в блоках – 0,5 и 0,35 мм2
. На кранах не допускается сечение проводов меньше 2,5 мм2
и с изоляцией на напряжение ниже 500 В.
Выбор сечения проводов и кабелей производится:
а) по условию нагрева длительным расчётным током

где Iдоп
– длительно допустимый ток провода, А;(6.1)
Iдл
– длительный ток линии, А;
kпопр
– поправочный коэффициент на условия прокладки проводов и кабелей;
б) по условию соответствия выбранному аппарату максимально-токовой защиты
 (6.2) (6.2)
где kз
– коэффициент защиты или кратность защиты;
Iз
– номинальный ток или ток срабатывания защитного аппарата, А.
Величины коэффициентов принимаются: kпопр
по таблице 1.3.3 [9, с.19], kз
по таблице 2.10 [11, с.46].
Изоляция выбранного провода или кабеля должна соответствовать условиям эксплуатации и уровню применяемого напряжения.
Для силовой цепи выбираем алюминиевый провод с поливинилхлоридной изоляцией Iн.п
= А и сечением S= мм2
А > А
Выбирем АПВ
6. Расчет сопротивления петли "фаза-ноль"
Контур, состоящий из фазы трансформатора и цепи фазного и нулевого проводников. Сопротивление петли фаза-ноль определяет ток такого короткого замыкания.
Если сопротивление петли фаза-ноль велико, то может оказаться, что ток короткого замыкания не достаточен для быстрого срабатывания защиты от короткого замыкания. И защита или вообще не отключает короткое замыкание, или отключает через длительное время. Все это время на корпусе электроаппарата присутствует опасное напряжение.
В электроустановках до 1000 В с заземлением нейтрали безопасность обслуживания электрооборудования при пробое на корпус обеспечивается отключением поврежденного участка с минимальным временем. При замыкании фазного провода на соединенный с нейтралью трансформатора (или генератора) нулевой провод или корпус оборудования образуется контур, состоящий из фазы трансформатора и цепи фазного и нулевого проводников. Этот контур принято называть петлей «фаза-ноль»
Проверка надежности и быстроты отключения поврежденного участка сети состоит в следующем:
Определяется ток короткого замыкания на корпус Iкз. Этот ток сопоставляется с расчетным током срабатывания защиты испытуемого участка сети. Если возможный в данном участке сети ток аварийного режима превышает ток срабатывания защиты с достаточной кратностью, надежность отключения считается обеспеченной.
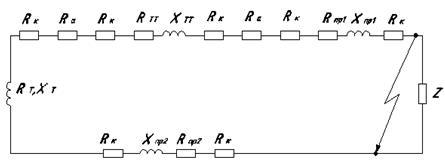
Произведем расчет сопротивления петли фаза-ноль
Рис.5 Схема для расчета петли «Фаза-ноль»
Где:
Rт
, Хт
- активное и индуктивное сопротивление вторичной обмотки силового трансформатора
Rк
- переходное сопротивление контактного соединения
Rа
- сопротивление аппаратов защиты и коммутации
Rтт
, Хтт
- активное и индуктивное сопротивление вторичной обмотки трансформатора тока
Rпр
, Хтпр
- активное и индуктивное сопротивление провода (длину провода в обоих случаях принимаем 80м.)
Z – электроприемник-потребитель.
Индуктивное и активное сопротивление обмотки трансформатора (мОм)
 (6.1) (6.1)
 (6.2) (6.2)
Сопротивления контактов определяются по следующей формуле
 (6.3) (6.3)
Полное сопротивление петли фаза-ноль
 (6.4) (6.4)
Ток к.з.
 (6.5) (6.5)
Поученный расчетный ток к.з. сравниваем с током срабатывания защитной аппаратуры. Если выполняется условие,  то аппарат защиты сработает и его выбор произведен верно то аппарат защиты сработает и его выбор произведен верно
Произведем расчет сопротивления петли фаза-ноль
В качестве трансформатора принимаем следующий
Sт
=630кВА
UВН
=10 кВ
UНН
=0,4 кВ
∆Рк
=7,6 кВ
Uк
=5,5%
Определяем сначала индуктивное и активное сопротивление обмотки трансформатора (мОм) по формулам (6.1) и (6.2)

 (6.2) (6.2)
Сопротивления контактов определяются по формуле (6.3)
Fк
=50 Н (сила нажатия в контакте)
K=4 (коэффициент, зависящий от материала контактов и состояния их поверхности; определяется по сводной таблице)
m=1,0 (коэффициент, зависящий от типа контакта)
 =0,78(мОм) =0,78(мОм)
По таблицам определяем остальные параметры
Rа
=1,3(мОм)
Rтт
=3(мОм)
Хтт
=4,8(мОм)
Rпр
=47,36(мОм)
Хтпр
=7,2(мОм)
Полное сопротивление петли фаза-ноль

Ток к.з.
Так как 2084 А>630 А то при к.з. защитная аппаратура сработает.
На этом расчет окончен
7. Техника безопасности
На промышленных предприятиях для работающего персонала окружающей средой является воздух рабочих зон (помещений) и прилегающих к ним территорий.Основным негативным фактором в литейном цехе влияющим на организм человека является шум, вибрация.При работе на кране применяются нефтепродукты, которые при определенных условиях могут загореться (машинное масло для смазки, керосин для промывки подшипников и очистки механизмов от старой смазки и т. д.), а также возможно самовоспламенение при хранении более 8 часов (обтирочные концы, ветошь пропитанная маслом). Вследствие этого в воздухе появляются вредные вещества, поэтому по очистке воздуха применяют следующие мероприятия:1 - запрет по хранению на кране запасов смазочного масла, керосина и обтирочных концов, которые необходимо немедленно удалять;2 - запрет на применение для очистки механизмов бензина, ацетона и других, легко воспламеняющихся жидкостей, а следует их заменять керосином;3 - применение естественной, приточной, вытяжной, приточно – вытяжной вентиляции, а также пылеотделителей.Шум и вибрация оказывают вредное влияние на организм человека. При длительном воздействии шума у человека снижается острота слуха и зрения, повышается кровяное давление, ухудшается деятельность органов дыхания, происходит ослабление внимания, памяти.Мероприятия по снижению шума:1 - применение, по возможности, малошумного производственного оборудования; 2 - выполнение своевременного и качественного ремонта машинного оборудования, так как причиной недопустимого шума является износ трущихся деталей, подшипников, неточная сборка машин при ремонтах;3 - применение индивидуальных средств защиты от шума, а также уплотнений конструкций, кожухов для источников шума и т. д.Мероприятия по снижению вибрации:1 - установка упругих элементов между вибрирующей машиной (механизмом) и основанием;2 - применение вибропоглощений путем нанесения на вибрирующую поверхность слоя резины, мастик или пластмасс;3 - применение индивидуальных средств защиты от вибраций: обувь на виброгасящей подошве, виброгасяшие рукавицы (перчатки).Троллейные проводники выполняют из гибких голых проводиков круглого или профильного сечения, из сталей жестких профилей или в виде закрытых троллейных шинопроводов. Троллейные провода закрепляют на опорных конструкциях жестко. В качестве опорных конструкций применяют кронштейны различных типов и троллее держатели.Работы по монтажу как главных, так и вспомогательных троллейных проводов состоят из монтажных работ, выпол - няемых на строительной площадке, и подготовительных ра -бот, комплектации в мастерских.В мастерских производят сборку блоков троллеев. Размер блоков определяется возможностью их перевозки на монтаж. Обычно блоки делаются длиной 6м. При сборке на опорные конструкции устанавливают троллеедержатели и на них монтируют троллеи.Работы по монтажу главных троллеев начинают с разметки горизонтальной линии трассы, которая отбивается по отметкам подкранового рельса. Затем размечают места установки опорных конструкций. Максимальное расстояниемежду опорными конструкциями для жестких троллейных проводников применяют 2-3 метра. Опорные конструкции крепят к металлическим конструкциям(балкам) приваркой или при помощи заделанных в балке крепежных деталей. Натяжные устройства к стенам крепят сквозными болтами. Особенности монтажа электрооборудования кранов требуют соблюдения соответствующих мер безопасности. Все места, откуда возможно падение людей, должны быть ограждены. Вход на кран допускается только по специально для этого устроенной лестницей с перилами. Инструменты, материалы и оборудование поднимать на кран следует только при помощи пеньковой веревки.Зону под монтируемым краном ограждают и вывешивают плакат: «Проход запрещен! Вверху работают». Работа с элек -троинструментом допускается лишь в резиновых перчатках и галошах; при этом инструмент должен быть заземлён. Элетроэнергию к электроинструменту подводят по шланговому проводу с исправной изоляцией. В местах, где можно упасть, работают в предохранительном поясе. Электросварочные провода должны иметь надёжную изоляцию, а сварщик работать в резиновых галошах или сапогах. Запрещается использование смонтированных троллеев в качестве подводки электроэнергии при производстве работ. Категорически запрещается передвигаться по подкрановым путям. 8. Экономия электроэнергии
Вопросы рационального и экономичного использования электроэнергии является важными, и отражают основные принципы электрохозяйства. Сейчас принят курс на ресурсосбережение за счет использования достижений науки и расширения применения вторичных ресурсов и отходов производства, снижения энергоемкости, металлоемкости и материалоемкости промышленной продукции во всех отраслях народного хозяйства. Оптимальным режимом электропотребления является такой же режим, при котором обеспечивается выполнение производственной программы с наименьшим количеством потребленной электроэнергии. Во всех элементах электрической сети при соблюдении заданных графиков активной и реактивной мощностей и с минимальными народнохозяйственными затратами.
В целях экономии электроэнергии на предприятиях следует сокращать непроизводительные потери в электрических сетях, вводить новые энергоснабжающие технологии и модернизированное оборудование, а так же повышать теплоемкость изоляции помещений промышленных предприятий.
Потери электроэнергии в трансформаторах, электодвигателях и другом электрооборудовании неизбежны, что связано с принципом действия этих ЭУ, однако за счет мероприятий по экономии электроэнергии, потери, должны быть, сведены к минимуму. Так, применение в схемах электроснабжения резервных перемычек на стороне НН цеховых ТП позволяет отключать трансформаторы в часы минимальных нагрузок и тем существенно снижать потери электроэнергии в цеховой сети.
Кроме естественной и искусственной компенсации реактивной мощности на промышленных предприятиях должны предусматриваться технологические режимно – эксплуатационные, организационные и другие мероприятия по снижению потерь электрической и тепловой энергии, выполнение которых следует согласовывать со всеми производственными службами. Наиболее совершенным является внедрение энергосберегающей безотходной технологии, гибких автоматизированных комплексов, усиление режима экономии. Существенным резервом снижения расхода электроэнергии являются утилизация теплоты уходящих газов и отработанного пара, а так же теплоты удаляемого из производственных зданий вентиляционного воздуха, блокировка в зимнее время вентиляторов тепловой завес с устройствами открывания и закрывания дверей служебных помещений.
Значительную экономию электроэнергии дает переход в промышленных цехах с ламп накаливания на более эффективные и экономичные люминисцентные лампы. Эти лампы обеспечивают более высокий уровень освещенности при одинаковой с лампами накаливания мощности, не обладают слепящим действием и практически не выделяют теплоты, что позволяет в ряде случаев снижать высоту установки светильников, имеют лучшие светотехнические характеристики и срок службы. Однако люминисцентные лампы дороже ламп накаливания, требуют установки пускорегулирующей аппаратуры, в которой расходуется дополнительная электроэнергия, и создаются помехи радио и теле приему. Тем не менее общий экономический эффект от применения люминисцентных ламп значительно выше по сравнению с применением ламп накаливания.
Для экономии электроэнергии при эксплуатации кранов предусматривают:
- правильный выбор мощности двигателя крановых механизмов
- правильный выбор рода тока и типа электропривода
- правильный выбор грузоподъёмности крана
- применение силовой полупроводниковой техники
- выбор рациональных методов работы
- при возможности сокращение перемещение грузов
- снижение высоты подъёма груза
- применение рациональных методов торможения
Литература
1 Коновалов Л.Л. Рожкова Л.Д. Электрооборудование промышленных предприятий и установок Москва «Энергоиздат» 1989г
2 Камнев В.Н. Чтение схем и чертежей электроустановок Москва Высшая школа 1990г
3 Чекалин Н.А. Охрана труда в электрохозяйствах промышленных предприятий Москва «Энергоиздат» 1990г
4 Зимин Е.И. Электрооборудование промышленных предприятий и установок Москва «Энергоиздат» 1981г
5 Правила устройства электроустановок. – М.: Энергоатомиздат, 1986.
6 Яуре А.Г., Певзнер Е.М. Крановый электропривод. – М.: Энергоатомиздат, 1988.
7 Липкин Б.Ю. Электроснабжение промышленных предприятий и установок. – М.: Высшая школа, 1990.
|