Дипломная работа на тему:
Модернизация приборов ультразвукового контроля труб
ВВЕДЕНИЕ
Экономическая политика промышленных предприятий направлена на повышение эффективности производства и качества продукции. Наиболее эффективное и распространенное в практике технологического, приемочного и эксплуатационного контроля качества материалов, полуфабрикатов, изделий, машин, установок и конструкций являются средства ультразвукового неразрушающего контроля. Начало промышленному производству средств УЗНК в нашей стране положено 41 год назад - в 1959 году в Кишинёве был создан завод "Электроточприбор". Нынешнее состояние на рынке отечественных производителей аппаратуры для неразрушающего контроля оставляет желать лучшего. Массового производства приборов ультразвуковой дефектоскопии, способного удовлетворить современным потребностям промышленных предприятий, нет. Аналогичное оборудование ведущих западных фирм, например Крауткремер, стоит чрезвычайно дорого (свыше 30 тысяч долларов США) и к тому же ориентация на зарубежного производителя не способствует становлению Российской экономики, развитию высоких технологий и поддержанию отечественного производителя.
Одно из наиболее перспективных применений дефектоскопов - это контроль продукции трубных предприятий. По данным поступающим из прессы, в Уральском регионе объем выпускаемой продукции трубных предприятий от общероссийского составляет свыше 50%, поэтому освоение на предприятиях радиоэлектронной промышленности Урала данного типа продукции можно считать одним из перспективных направлений. В частности, ведущий разработчик сложной электронной продукции Государственное унитарное предприятие "УПКБ Деталь" имея опыт в разработке ультразвуковых дефектоскопов ( УДС1 в настоящее время эксплуатируется на Синарском трубном заводе ) в конце 2000г. получило предложение от Челябинского трубопрокатного завода произвести модернизацию существующего парка оборудования для неразрушающего контроля сварных труб большого диметра для нефтегазовой промышленности. Основной причиной для Челябинцев сделать настоящее предложение послужила хорошая репутация конструкторского бюро "Деталь" и географическая близость предприятий. При обсуждении основных требований, предъявляемых к конкретному оборудованию, были взяты за основу существующие приборы, как отечественного, так и импортного производства: USIP фирма Крауткрамер; УДС-1 ГУП "УПКБ Деталь"; УД11УА ВНИИНК Кишинев УД-82УА ВНИИНК Кишинёв, а также применяемая технология контроля качества труб в службе неразрушающего контроля Челябинского трубопрокатного завода. В результате было выработано техническое задание и частично определены пути реализации дефектоскопа. Копия согласованного технического задания приведена ниже.
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
на ОКР "Модернизация приборов ультразвукового контроля труб" шифр "Эхо-2"
1 Цель и назначение работы
Целью работы является расширение функциональных возможностей, снижение веса и габаритов приборов неразрушающего контроля качества продукции в цехах трубопрокатного завода.
Назначение работы состоит в создании перспективной модели ультразвукового дефектоскопа для автоматизированного многоканального контроля сварных швов, околошовных зон и основного металла торцов электросварных труб большого диаметра.
Условное обозначение дефектоскопа УДС-02.
2 Технические требования
Состав дефектоскопа
.
В комплект поставки дефектоскопа должно входить:
электронный прибор 1 ,
комплект кабелей 1,
паспорт 1,
руководство по эксплуатации 1.
2.2. Требования к генератору импульсов возбуждения
2.2.1. Число генераторов 12,
2.2.2. Частота следования импульсов в системе, кГц 5,0 ± 0,5 или 10 ±1
2.2.3. Длительность импульсов с дискретом 0,05 мкс, мкс 0,05 - 1,0
2.2.4. Напряжение генератора, В 200 и 400
2.2.5. Смещение импульсов возбуждения относительно 0-100 импульсов синхронизации с шагом 0,1 мкс, мкс
2.2.6. Режим работы генераторов последовательный
2.3. Требования к усилителям
2.3.1 Число усилителей для каналов:
предварительных 12,
основных: 3
1 по дефекту,
1по теневому сигналу,
1 по донному сигналу
2.3.2. Частотный диапазон, МГц 2,5 ± 0,25
2.3.3. Полоса пропускания, МГц 0,5 ± 0,05
2.3.4. Регулировка усиления:
в предварительных усилителях плавно или с шагом 0,1 дБ, дБ 20,
в основных усилителях с шагом 2 дБ, дБ 80
2.3.5. Детектирование однополупериодное
2.3.6. ВРЧ в основном канале по дефекту, дБ 15
2.3.7. Число опорных точек для ВРЧ не менее 8
Стробблокировка в канале дефекта от начала по амплитуде
синхронизирующего импульса до начала зоны контроля
зондирующего с возможностью отключения
импульса не более
0,5 высоты экрана
2.4 Требования к зоне контроля
2.4.1. Число зон контроля:
по дефекту и тени 1,
по донному сигналу с запуском по заднему
фронту зоны контроля по тени 1
2.4.2. Задержка зон контроля с шагом 0,1 мкс, мкс 0-200
2.4.3. Длительность зон контроля с шагом 0,1 мкс, мкс 0-200
2.4.4. Длительность зоны контроля донного сигнала, мкс 10
2.4.5. Подавление помех в каждом такте 2 или 4 цикла
2.4.6. Регулировка порога от высоты экрана дисплея, % 5-100
2.5. Требования к сигнализации
2.5.1. Сигнализация наличия отраженного сигнала 3 красных
в каналах дефекта, отсутствия сигнала в каналах тени
светодиода,
и донного сигнала с задержкой длительностью:
в режиме "автомат" 1 с,
в ручном режиме без задержки
2.5.2. Сигнализация срабатывания, индикация на дисплее
номера такта и конфигурации датчиков (по вызову из меню)
2.6.
Изображение отраженных сигналов
2.6.1. Дисплей электролюминесцентный или ЖК с подсветкой
с размером экрана ~120х100 мм
2.6.2. Изображение зон контроля форме ступеньки на основной линии развертки
2.6.3. Изображение отраженных сигналов видеосигнал
2.6.4. Запуск развертки по синхронизирующему импульсу
2.6.5. Режимы работы 1) настройка, 2) работа,
3) Откл.
2.7.
Выходы и интерфейсы
Релейные выходы: наличия дефекта, отсутствия 1, с гальванической
теневого и донного сигналов, параллельный 4-х разрядный код
развязкой через
номера такта
оптронную пару
2.7.2. Последовательный интерфейс RS-232 двусторонний, для управления прибором и передачи результатов настройки и работы
2.8.
Панель управления
2.8.1. Представление на экране дисплея
2.8.2. Задание меню через функциональные кнопки и курсор
Регулировка усиления, параметров,
установка параметров регулировки установка конфигурации
клавиатурой и кнопками «больше» и
«меньше»
2.9. Питание
2.9.1. Питание от сети переменного тока по ГОСТ 13109-97 напряжением (220 ±22) В частотой (50 ± 0,5) Гц
Условия эксплуатации
2.10.1.По условиям эксплуатации прибор классифицируется в соответствии с ГОСТ 12997-84 как предназначенный для информационной связи с другими приборами, электрический, третьего порядка, не имеющий точностных характеристик, защищенный от попадания внутрь прибора твердых тел и от агрессивных сред, виброустойчивый.
2.10.2. Устойчивость к воздействию температуры и влажности В2,
2.10.3. Устойчивость к воздействию синусоидальных вибраций N2
Прибор должен быть разработан с учетом присутствия в атмосфере цеха пыли и фтора
Прибор должен быть выполнен в настольном исполнении
Время непрерывной работы не менее 16 часов.
Прибор должен иметь режим самотестирования основных узлов
2.11. Требования по метрологии
2.11.1 Прибор является пороговым средством контроля.
2.12. Сертификация
2.12.1 Приборы должны иметь сертификаты качества.
2.13
Надежность
2.13.1. Срок службы приборов должен быть не менее 10 лет,
2.13.2. Гарантийные обязательства: 18 месяцев, из них 6 месяцев хранения.
3 Этапы работ
| № п/п |
Этапы работ и их содержание |
Ориентировочная продолжительность работ |
Примечание |
| 1 |
Разработка конструкторской документации, изготовление и испытание макетов на оборудовании заказчика, корректировка КД |
6 месяцев |
| 2 |
Изготовление 3-х опытных образцов дефектоскопов. Проведение предварительных испытаний и испытаний на оборудовании заказчика |
9 месяцев |
| 3 |
Корректировка КД по результатам испытаний. Доработка и поставка заказчику 3-х дефектоскопов |
3 месяца |
| 4 |
Изготовление и поставка заказчику 7-ми дефектоскопов |
9 месяцев |
Сроки выполнения работ по этапам уточняются договорными документами.
4 Порядок приемки этапов работы
4.1 Работы первого и второго этапов принимаются на техническом совещании исполнителя. Окончанием этапов является дата утверждения протоколов испытаний макета и опытных образцов.
Приемка и поставка дефектоскопов производится в соответствии с техническими условиями на дефектоскоп, согласованными с заказчиком.
Настоящее ТЗ может уточняться в процессе разработки дефектоскопа.
Не углубляясь в физическую сущность ультразвуковой дефектоскопии, кратко определим основные процессы и методы неразрушающего контроля. Ультразвуковая эхоскопия - это методы и технические средства получения визуальной информации о внутренней структуре различных объектов и сред путем использования явлений отражения, рассеяния и поглощения ультразвуковых сигналов, образующихся при взаимодействии ультразвукового излучения с исследуемым объектом. Слово "Эхоскопия" происходит от греческих слов echo - эхо и skopeo - смотрю, буквальном смысле оно обозначает только наблюдение эхо - сигналов. Однако со временем это слово приобрело более широкий смысл: под ним понимается не только получение визуальной информации, но и определение на основе этой информации параметров исследуемой среды. Интерес к практическому использованию ультразвуковой эхоскопии обусловлен в первую очередь тем, что из-за различной природы ультразвуковых и электромагнитных волн (видимого света, рентгеновских лучей и др.) она позволяет наблюдать оптически непрозрачные структуры за счет механических, точнее акустических свойств, что в некоторых случаях невозможно при использовании проникающих электромагнитных излучений. Причем, важным преимуществом является то, что при низких интенсивностях ультразвуковых сигналов они безвредны для живых организмов. Поэтому ультразвуковая дефектоскопия используется для целей медицинской диагностики и дефектоскопии различных изделий, включая медицинское и техническое применение ультразвуковой микроскопии, а также визуализации подводных объектов. Дальнейшее расширение внедрения ультразвуковых методов визуализации и измерений идет параллельно с решением проблем разработки более оптимальных методов преобразования акустических полей в оптические изображения и создания средств, обеспечивающих переход от качественного анализа этих изображений к количественному. С каждым годом растет число публикаций по ультразвуковой эхоскопии. Но большинство из них представляют собой научные статьи, посвященные отдельным вопросам реализации и применения соответствующих систем. Обобщающие работы опубликованы по практическому, в частности диагностическому, применению ультразвуковых эхоскопов. Однако до сих пор в нашей стране не изданы книги, в которых обобщенно и последовательно были бы рассмотрены теоретические и технические аспекты, актуальные для разработчиков этих систем.
Для ультразвуковых исследований могут применяться различные принципы и эффекты, основанные на эффектах дифракции света, голографии, поверхностного рельефа и др. Однако импульсные эхоскопы имеют ряд преимуществ перед устройствами других типов. С их помощью возможно формирование эхоизображений при слабых эхосигналах, т. е. могут быть применены ультразвуковые импульсы малой мощности, практически безвредные для живых организмов.
В последнее время благодаря преимуществам этих приборов они получили в мировой практике особенно бурное развитие, как в плане технического усовершенствования, так и расширения областей применения. Анализ современных достижений в области ультразвуковой визуализации показывает, что устройства этого типа можно считать основным типом ультразвуковых эхоскопов предназначенных для исследований и дефектоскопии.
Количество информации, получаемой с помощью ультразвуковых эхоскопов, их точность и быстродействие определяются параметрами зондирующих импульсов, характеристиками ультразвуковых преобразователей, а также способами и характеристиками устройств обработки и оценки параметров эхо - сигналов, несущих информацию о свойствах сред. Для быстрого электрического управления ультразвукового сканирования все шире применяют встроенные микропроцессорные и внешние вычислительные устройства. Особенности ультразвуковых эхоскопических дефектоскопов со сканированием определяется особенностями исследуемых объектов, условиями ввода ультразвука, а также контролируемыми параметрами.
В эхоскопической дефектоскопии в основном применяют методы ручного или автоматического механического сканирования. Электрический коммутационный или смешанный коммутационно-механический методы сканирования находят применение при исследовании тонкостенных, протяженных объектов, например листовых материалов и труб. Электрическое управление характеристиками направленности пьезопреобразователей используется при исследовании объемных (толстостенных) объектов. Во всех этих случаях применяется иммерсионный или контактный методы связи объекта с электроакустическими преобразователями. Так как реализация хорошего акустического контакта при перемещении преобразователя во многих случаях является довольно сложной задачей с точки зрения контроля этого контакта, в ультразвуковых дефектоскопах иногда используются дополнительные акустические каналы.
1. ОБЗОР СУЩЕСТВУЮЩИХ ДЕФЕКТОСКОПОВ
1.1 Анализ приборов для ультразвукового контроля сварных труб, на Челябинском трубопрокатном заводе, установка УД-82УА
Одна из применяемых установок для неразрушающего контроля сделана на базе автоматизированной эхоскопической установке УД-82УА [ ] и предназначена для контроля сварных швов труб большого диаметра. В состав этой установки может входить до четырех каналов ультразвукового зондирования, содержащих по два электроакустических преобразователя, один из которых обеспечивает ввод ультразвука под углом 40--50 градусов к поверхности трубы, а другой под углом90 градусов. Второй преобразователь в каждом канале служит для контроля акустического контакта между преобразователями и поверхностью трубы. Этот контроль основан на фиксации эхо-сигналов, отраженных от поверхности стенки. При контроле сварных швов преобразователи устанавливаются в устройства ориентации, обеспечивающие их юстировку относительно шва при реализации различных схем прозвучивания и корректировку угла ввода ультразвука в пределах +-5 градусов при изменении акустических или геометрических параметров контролируемых изделий, а также при изменении температуры. Для повышения разрешающей способности и чувствительности этих дефектоскопов в них используются генераторы зондирующих импульсов с модуляцией частоты повторения импульсов в пределах 20%. Частотная модуляция позволяет уменьшить интерференционные помехи и тем самым повысить вероятность обнаружения дефектов. Этим дефектоскопом обеспечивается контроль сварных соединений при толщинах стенок от 4 мм до 40 мм Скорость продольного сканирования до 0,5 м/с.
При ультразвуковом контроле труб используется поступательное движение трубы, при этом блок с акустическими преобразователями неподвижен. Ниже приведена обобщенная структурная схема импульсного ультразвукового дефектоскопа сварных швов.
СИГНАЛ О НАРУШЕНИИ КОНТАКТА
ОТМЕТКА О ДЕФЕКТЕ
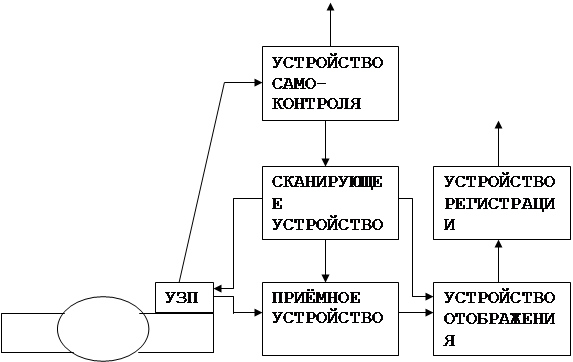
Рисунок 1 - Структурная схема ультразвукового дефектоскопа УД-82УА.
1.2 Установка КРАУТКРАМЕР и технологический цикл контроля сварных швов
Другая, применяемая установка немецкой фирмы Крауткремер тип KS 3000 имеет восемь каналов, работающих как в совмещенном, так и в раздельно - совмещенном режиме. Принцип работы установки в этих режимах состоит в следующем: при совмещенном режиме пьезопреобразователь служит как для излучения, так и для приема эхо - сигнала; при раздельном режиме в прозвучивании сварного соединения используют два пьезопреобразователя, один служит для излучения ультразвука, другой для приема ультразвукового сигнала. Таким образом, на установке Крауткремер удаётся решить проблему контроля акустического контакта и контроля сварного соединения с помощью одних и тех же пьезопреобразователей. Это достигается с помощью раздельной во времени работы акустических каналов, т.е. каждый канал работает в строго определенном такте цикла контроля.
Схема расположения пьезопреобразователей относительно сварного соединения во время технологического контроля приведена на рисунке.
Основные типы дефектов, контролируемые на технологической установке Крауткремер - это непровары, пустоты и посторонние включения в сварном шве, расслоение основного металла в околосварной зоне (зона термического влияния). И в зависимости от этого и от последовательности работы каналов на установке различают следующие типы конфигурации: L-форма; X-форма; K-форма. Ниже приведена последовательность работы по тактам, а также функции выполняемые каждым пьезопреобразователем (Рис.). Цикл контроля имеет шесть тактов, из которых два последних используются для контроля акустического контакта, остальные для контроля качества сварного соединения.
Визуальная информация о наличии и величине дефекта, выводится на экран осциллографической трубки в реальном масштабе времени . На экране также отображаются стробирующие импульсы (строб-импульс щуп), определяющие зону контроля. Рассматриваемые приборы относятся к приборам с одномерной ультразвуковой визуализацией, при которой определяются амплитуда и момент времени приёма эхо - сигнала или теневого сигнала, полученных зондированием исследуемой среды по одному направлению ультразвукового луча. Такие приборы обеспечивают формирование одномерных эхограмм так называемого А-типа, характеризующих расположение прозвученных неоднородностей среды по одной продольной координате. Ниже приведены осциллограммы работы дефектоскопа при настройке на эталоне.
Временные интервалы задаются с учетом конструктивных особенностей установки рабочей головки с пьезопреобразователями, углом ввода ультразвукового луча и скорости ультразвука в материале трубы. Оптимальное расстояние от зоны контроля до пьезопреобразователя L составляет 9,6 толщин листа H трубы, например для листа H = 15 мм.
L = 9,6 * H = 9,6 * 15 = 144 мм.
Скорость ультразвука в стали составляет V = 5920 м/сек. Для такой скорости период развертки, с учетом прямого и обратного хода ультразвукового луча будет
Т4 = 2 * L / 5920 м/cек = 48.7 мксек.
Ширина сварного шва D для толщины листа H = 15 мм. D = 15 мм., таким образом длительность строб-импульса Т4 - Т3 будет
Т4 - Т3 = 2 * D / 5920 м/сек. = 5 мксек.
2. ВЫБОР И ОБОСНОВАНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ БЛОКА УПРАВЛЕНИЯ УЛЬТРАЗВУКОВЫМ ДЕФЕКТОСКОПОМ
Современные Ультразвуковые эхоскопы позволяют не только формировать эхоизображения, но и измерять по ним необходимые структурно - топологические и динамические характеристики исследуемых объектов, а также осуществлять функции анализа и сохранения измеряемых значений. Такие эхоскопы по существу являются информационно-измерительными системами (ИИС) и они обобщенно могут быть представлены следующей структурной схемой.
 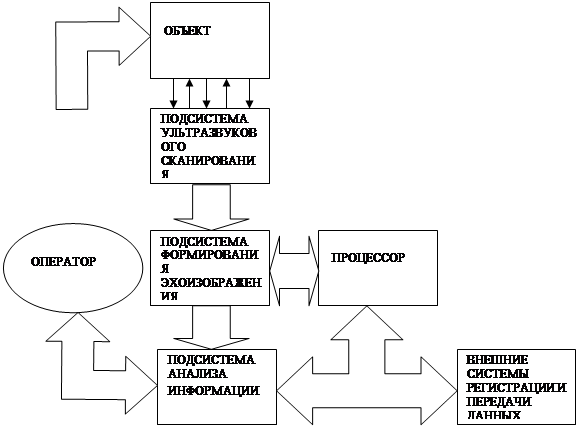
Рисунок 7-Обобщенная структурная схема ИИС ультразвуковой эхоскопии
Подсистемой ультразвукового сканирования осуществляется пространственно-селективное ультразвуковое зондирование исследуемой среды и формирование одномерного или многомерного сигнального поля, как функции пространственных координат, времени, амплитуды, спектра или других параметров эхо-сигналов, а также преобразование этого поля в упорядоченную во времени, одномерную последовательность эхо-сигналов, согласованную с радиотехническим трактом ИИС. В подсистеме сканирования вы выполняется также предварительная обработка сигналов, включающая процедуры функционального усиления, задержки, стробирования, ограничения, пространственной фильтрации, нормировке и другие, в результате которой обеспечивается согласование диапазонов изменения параметров электроакустического волнового тракта с соответствующими характеристиками радиотехнических устройств формирования, отображения и анализа эхоизображений.
Структура подсистемы ультразвукового сканирования в зависимости от решаемых ИИС задач может быть весьма разнообразной, однако во всех случаях неотьемлимыми её частями являются: генератор электрических сигналов, излучающие и приемные электроакустические преобразователи, сканирующие устройства, приемник эхо-сигналов и необходимые устройства первичной обработки эхо-сигналов (рис ). В процессе формирования эхоизображений генератор электрических сигналов вырабатывает импульсы, возбуждающие электроакустический преобразователь, который излучает зондирующие импульсы в исследуемую среду. Электроакустический преобразователь является также акустической антенной, обеспечивающей направленное излучение зондирующих ультразвуковых импульсов. В исследуемой среде в пределах пространственной протяженности ультразвукового луча образуются волновые эхолокационные каналы.
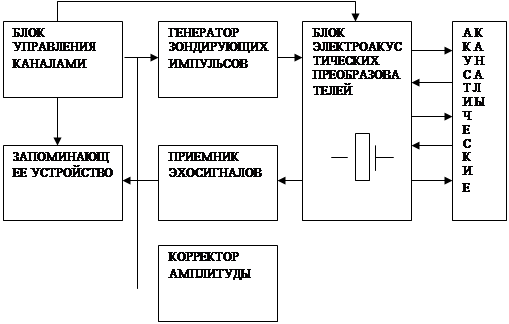
 Рисунок 8-Обобщенная структура подсистемы ультразвукового сканирования Рисунок 8-Обобщенная структура подсистемы ультразвукового сканирования
Для исключения влияния искажающих возмущений и помех, появляющихся в эхолокационных каналах, в составе подсистемы ультразвукового сканирования обычно предусматриваются соответствующие функциональные корректирующие устройства, например блоки временной регулировки усиления и динамического диапазона эхо - сигналов, коррекции поглощения, рассеяния ультразвука в среде и т.д. Синтез корректирующих операторов, определяющих алгоритмы работы этих устройств, основывается на математических моделях возмущающих воздействий в среде и электроакустических цепях передачи сигналов.
С учетом того, что процессы эхоскопии случайно -неоднородных сред не всегда могут быть априорно адекватно промоделированы, устройства коррекции сигнальных искажений должны допускать интерактивное воздействие оператора на возможно большее число управляемых параметров и характеристик электроакустического тракта. С этой целью в структурную схему современных эхоскопов часто вводятся блоки адаптивного управления параметрами приемноусилительного тракта подсистем, и обеспечивается связь источника зондирующих сигналов с процессором. Введение таких дополнительных связей отражает появление функций программной управляемости измерительных зондирующих воздействий на объект при пространственном сканировании направления ультразвукового луча.
Подсистемой формирования эхоизображений обеспечиваются: обратное преобразование одномерной последовательности эхо - сигналов в многомерный сигнальный эквивалент эхоизображения, запись и хранение сигнального эквивалента эхоизображения в специально организованной памяти, а также визуальное отображение эхоизображения на соответствующем индикаторе в необходимом временном масштабе. При этом часто выполняются процедуры обработки информации, позволяющие повысить разрешающую способность и достоверность информации. Задачей подсистемы отображения формирования эхоизображений является также согласование динамического диапазона амплитуд отображаемых сигналов с динамическим диапазоном индикатора, а также коррекция нелинейности его характеристики [ ].
В основу подсистемы формирования эхоизображений обычно закладывается двумерное запоминающее устройств, в качестве которого могут использоваться аналоговые запоминающие электронно-лучевые трубки, а также цифровые элементы памяти. В современных ИИС ультразвуковой эхоскопии именно цифровые устройства памяти находят наиболее широкое применение. Поскольку они обеспечивают преобразование эхоизображений с минимальными искажениями и хорошо согласуются с цифровыми процессорными устройствами управления и обработки сигналов. Обобщенная структурная схема подсистемы цифрового формирования-хранения эхоизображений приведена на рисунке.
  
Рисунок 9-Обобщенная структурная схема подсистемы формирования эхоизображения
Процессор имеет связь с устройствами буферизации и записи эхосигналов в память, а также вычисления адресов и весовых параметров записи, зависимых от координат ультразвукового сканирования. Для обеспечения преобразования эхосигналов в реальном масштабе времени, поступающих из подсистемы сканирования, при малых уровнях квантования по времени и амплитуде аналого-цифровые преобразователи должны работать при довольно высоких частотах дискретизации, достигающих 20-40 МГц. При необходимости коррекции искажений эхосигналов иногда используется нелинейная амплитудная функция преобразования. Кроме этого может проводиться покоординатная весовая коррекция амплитуды, так называемая временная регулировка чувствительности (ВРЧ) или временная регулировка порога (ВРП). Буферная память также обеспечивает согласование временных процессов приема эхо - сигналов и формирования телевизионного эквивалента эхоизображений при разных пространственных пределах и видах ультразвукового сканирования.
Подсистема анализа информации служит для визуального отображения информации ИИС на различных стадиях её сбора и обработки, ввода целеуказателей и директив оператора, касающихся режимов анализа, непосредственно измеряемых параметров и алгоритмов вычисления требуемых характеристик, а также ввода извне дополнительной служебной информации. Подсистема анализа обеспечивает визуализацию эхоизображений и их увеличенных фрагментов непосредственно в процессе записи информации в запоминающие устройства и в режиме регенерации стоп - кадра, совмещение с эхоизображением метрических шкал, перемещаемым маркерным меткам и других семантических индексов. В соответствии с вводимыми директивами и маркирующими целеуказаниями подсистема проводит вычисления необходимых характеристик исследуемых объектов по заложенным в ИИС алгоритмам и отображение результатов вычислений в алфавитно-цифровом и графическом виде.
Для выполнения указанных функций наилучшим образом подходит структура, использующая управляющую микроЭВМ. Основным структурным элементом подсистемы в этом случае должно быть программно - управляемое устройство формирования шкал и другой служебной информации, совмещаемой с эхоизображениями при их многопараметрическом анализе. В качестве устройств отображения информации в современных ИИС ультразвуковой эхоскопии, как правило, применяются телевизионные устройства.
При разработке нового прибора, у которого нет аналогов в Росси, имеет смысл придерживаться вышеизложенной концепции организации функциональной схемы и идеи работы дефектоскопа, кроме этого необходимо соблюсти все требования оговоренные в техническом задании. Для реализации аппаратной части можно применить функционально законченные узлы высокой степени интеграции на базе IBM совместимых персональных компьютеров в промышленном исполнении. Архитектура аппаратной части прибора должна быть максимально гибкой для возможной настройки на любой технологический процесс контроля качества сварных соединений и допускать наращивание каналов. Последовательность работы каналов должна допускать любую конфигурацию и возможность работы каналов, как в раздельном, так и в раздельно - совмещенном режиме. Каждый канал должен иметь независимые настройки временных задержек и коэффициента усиления предварительных усилителей. Все настройки должны сохраняться в памяти параметров компьютера и сохраняться при выключении или сбоях электрического питания с последующим восстановлением работоспособности в предыдущем режиме.
Обобщенная функциональная схема прибора в соответствии с требованиями технического задания приведена на рисунке
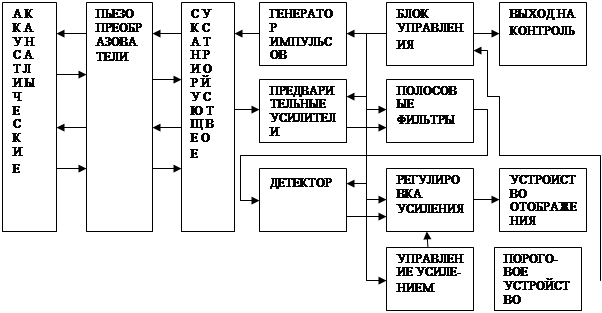
   Рисунок 10-Обобщенная структурная схема прибора Рисунок 10-Обобщенная структурная схема прибора
3. РАЗРАБОТКА СХЕМЫ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ БЛОКА УПРАВЛЕНИЯ
3.1 Анализ системной магистрали
ISA
Блок управления ультразвукового дефектоскопа является цифровым устройством, выполненным в виде отдельной платы и устанавливаемым в пассивную плату промышленной станции. Входные и выходные сигналы по уровню напряжения должны соответствовать системной магистрали ISA, (Industrial Standard Architecture) и кроме этого необходимо учитывать скорость обмена данными по шине.
Особенности магистрали ISA.
Магистраль ISA относится к демультиплексированным, (то есть имеющим раздельные шины адреса и данных)16-разряд-ным системным магистралям среднего быстродействия. Обмен осуществляется 8- или 16-разрядными данными. На магистрали реализован раздельный доступ к памяти компьютера и устройствам ввода/вывода (для этого имеются специальные сигналы). Максимальный объем адресуемой памяти составляет 16 Мбайт (24 адресных линии). Максимальное адресное пространство для устройств ввода/вывода - 64 Кбайта (16 адресных линий). Магистраль поддерживает регенерацию динамической памяти, радиальные прерывания и прямой доступ к памяти. Допускается также захват магистрали. Назначение контактов разъёма представлено в таблице 1 (здесь знак минус перед названием сигнала означает, что активный уровень сигнала - логический нуль)
Таблица 1 - Назначение контактов разъема ISA.
| Контакт |
Цепь |
I/O |
Контакт |
Цепь |
I/O |
| A1 |
-I/O CH CK |
I |
B1 |
GND |
- |
| A2 |
SD7 |
I/O |
B2 |
RESET DRV |
O |
| A3 |
SD6 |
I/O |
B3 |
+5 В |
- |
| A4 |
SD5 |
I/O |
B4 |
IRQ9 (IRQ2) |
I |
| A5 |
SD4 |
I/O |
B5 |
-5 В |
- |
| Контакт |
Цепь |
I/O |
Контакт |
Цепь |
I/O |
| A6 |
SD3 |
I/O |
B6 |
DRQ2 |
I |
| A7 |
SD2 |
I/O |
B7 |
-12 В |
- |
| A8 |
SD1 |
I/O |
B8 |
0WS |
I |
| A9 |
SD0 |
I/O |
B9 |
+12 В |
- |
| A10 |
I/O CH RDY |
I |
B10 |
GND |
- |
| A11 |
AEN |
O |
B11 |
-SMEMW |
O |
| A12 |
SA19 |
I/O |
B12 |
-SMEMR |
O |
| A13 |
SA18 |
I/O |
B13 |
-IOW |
I/O |
| A14 |
SA17 |
I/O |
B14 |
-IOR |
I/O |
| A15 |
SA16 |
I/O |
B15 |
-DACK3 |
O |
| A16 |
SA15 |
I/O |
B16 |
DRQ3 |
I |
| A17 |
SA14 |
I/O |
B17 |
-DACK1 |
O |
| A18 |
SA13 |
I/O |
B18 |
DRQ1 |
I |
| A19 |
SA12 |
I/O |
B19 |
-REFRESH |
I/O |
| A20 |
SA11 |
I/O |
B20 |
SYSCLK |
O |
| A21 |
SA10 |
I/O |
B21 |
IRQ7 |
I |
| A22 |
SA9 |
I/O |
B22 |
IRQ6 |
I |
| A23 |
SA8 |
I/O |
B22 |
IRQ5 |
I |
| Контакт |
Цепь |
I/O |
Контакт |
Цепь |
I/O |
| A24 |
SA7 |
I/O |
B24 |
IR4 |
I |
| A25 |
SA6 |
I/O |
B25 |
IR3 |
O |
| A26 |
SA5 |
I/O |
B26 |
-DACK2 |
O |
| A27 |
SA4 |
I/O |
B27 |
T/C |
O |
| A28 |
SA3 |
I/O |
B28 |
BALE |
- |
| A29 |
SA2 |
I/O |
B29 |
+5 В |
O |
| A30 |
SA1 |
I/O |
B30 |
OSC |
- |
| A31 |
SA0 |
I/O |
B31 |
GND |
- |
| C1 |
-SBHE |
I/O |
D1 |
-MEM CS16 |
I |
| C2 |
LA23 |
I/O |
D2 |
-I/O CS16 |
I |
| C3 |
LA22 |
I/O |
D3 |
IRQ10 |
I |
| C4 |
LA21 |
I/O |
D4 |
IRQ11 |
I |
| C5 |
LA20 |
I/O |
D5 |
IRQ12 |
I |
| C6 |
LA19 |
I/O |
D6 |
IRQ15 |
I |
| C7 |
LA18 |
I/O |
D7 |
IRQ14 |
I |
| C8 |
LA17 |
I/O |
D8 |
-DACK0 |
O |
| C9 |
-MEMR |
I/O |
D9 |
DRQ0 |
I |
| C10 |
-MEM |
I/O |
D10 |
-DACK5 |
O |
| C11 |
SD8 |
I/O |
D11 |
DRQ5 |
I |
| C12 |
SD9 |
I/O |
D12 |
-DACK6 |
O |
| C13 |
SD10 |
I/O |
D13 |
DRQ6 |
I |
| C14 |
SD11 |
I/O |
D14 |
-DACK7 |
O |
| C15 |
SD12 |
I/O |
D15 |
DRQ7 |
I |
| C16 |
SD13 |
I/O |
D16 |
+5 В |
- |
| C17 |
SD14 |
I/O |
D17 |
-MASTER |
I |
| C18 |
SD15 |
I/O |
D18 |
GND |
- |
В магистрали ISA используется положительная логика на шинах адреса и данных, то есть единице соответствует высокий уровень напряжения, а нулю - низкий На магистрали присутствуют четыре напряжения питания: +5 В, -5 В, +12 В, -12 В, которые могут использоваться платами расширения.
В адресах ввода/вывода магистрали ISA имеются резервные адреса, это адреса с 360 по 36F (адреса даны в 16 - ричном коде). Поэтому адресацию к блоку управления и микросхемам внутри блока целесообразно построить с использованием этих адресов.
3.2 Выбор элементной базы
Для организации независимой конфигурации последовательного сканирования электроакустических преобразователей, как в приемных, так и в передающих каналах с сохранением параметров применены микросхемы статического запоминающего устройства небольшой ёмкости серии К531 на основе ТТЛШ - элементов. Тип микросхемы К531 РУ8П.
Электрические параметры и назначение выводов.
Информационная ёмкость 64 бит
Организация 16 слов * 4 разряда
Время выборки адреса Не более 35 нс (при 25° С)
Напряжение питания 5 В ± 5%
Потребляемая мощность Не более 580 мВт
Диапазон температур - 10...+ 70°С
Выход Три состояния
Совместимость по входу и выходу С ТТЛ-схемами
Тип корпуса Пластмассовый, 201.16 - 16
К531РУ8П
| 1 |
A0
A1
A2
A3
|
RAM
|
DO0
DO1
DO2
DO3
|
| 15 |
5 |
| 14 |
| 13 |
| 7 |
| 4 |
DI0
DI1
DI2
DI3
|
| 6 |
| 10 |
9 |
| 12 |
| 2 |
CS
WR/RD
|
11 |
| 3 |
Рисунок 11 - УГО микросхема К531РУ8П.
Таблица 2 - Таблица истинности микросхемы К531РУ8П.
| CS |
WR/RD |
A0 A3 |
DI0 DI3 |
DO0 DO3 |
Режим работы |
1
0
0
0
|
X
0
0
1
|
X
A
A
A
|
X
0
1
X
|
R
R
R
Данные в прямом коде
|
Хранение
Запись 0
Запись 1
Считывание
|
Таблица 3 - Назначение выводов микросхемы К531РУ8П.
| Выводы |
Назначение |
Обозначение |
1, 15, 14, 13
4, 6, 10, 12
5, 7, 9, 11
2
3
16
8
|
Адресные входы
Входы данных
Выходы данных
Выбор микросхемы
Сигнал запись - считывание
Напряжение питания
Общий
|
A0 A3
DI0 DI3
DO0 DO3
CS
WR/RD
Uсс
0 В
|
Для организации управления записью/чтением данных в статическое запоминающее устройство и управлением сканированием электроакустическими каналами применены микросхемы серии К1533.
Технические характеристики микросхем серии К1533
Стандартные ТТЛ входные выходные уровни сигналов
Напряжение питания 5,0 В ± 10%
Задержка на вентиль 4 нс
Мощность потребления на вентиль 1 мВт
Тактовая частота до70 МГц
Выходной ток нагрузки низкого уровня до 24 мА
Выходной ток нагрузки высокого уровня до -15 мА
Гарантированные статические и динамические характеристики при ёмкости нагрузки 50 пФ в диапазоне температур от.-10°С до +70°С и напряжении питания 5 В ± 10%
Устойчивость к статическому электричеству до 200 В
Широкий набор типономиналов микросхем.
3.3 Описание работы блока управления
Блок управления должен работать в трёх режимах:
-первый режим - режим обмена данными между системным блоком и блоком управления по системной магистрали ISA;
-второй режим - режим автономной работы и управлением сканированием электроакустическими каналами;
-третий режим - режим многократной работы любого канала.
Для выборки адреса в ОЗУ применен двоичный счетчик D6 К1533ИЕ7.
К1533ИЕ7
D
0
1
2
3
|
CT16
|
Q
0
1
2
3
|
| 15 |
3 |
| 1 |
| 10 |
2 |
| 9 |
| 6 |
| 11 |
| L |
7 |
| 5 |
| 4 |
CU |
| CD |
PU
PD
|
12 |
| 14 |
13 |
| R |
Рисунок 12 - УГО микросхема К1533ИЕ7.
Счётчик К1533 ИЕ7 это счетчик с расщепленным тактовым сигналом, функция тактового сигнала
C = ( U V U ) * C = Cu V CD,
где C (Clock
) - тактовый сигнал, Cu = U * C, CD = U * C (U - Up -
сложение, D - Down
- вычитание)
Функция переполнения счетчика Pu, P D будет следующяя:
Pu = Cu * Π Qr, PD * Π Qr,
где Pu - перенос, PD - заём.
Чтобы иметь возможность управления любым количеством каналов (от 1 до 64) и организации цикличности сканирования в схеме предусмотрена загрузка счетчика числом равным числу электроакустических каналов и хранением этого числа в буферном регистре данных выполненного на микросхеме D2 К1533ТМ8.
К1533ТМ8
| 4 |
D
0
1
2
3
|
TT
|
Q
0
1
2
3
|
2 |
| 5 |
3 |
| 12 |
7 |
| 13 |
6 |
| 10 |
| 9 |
C
|
11 |
| 15 |
| 1 |
R
|
14 |
Рисунок 13 - УГО микросхема К1533ТМ8.
Функция перехода регистра памяти ТМ8
Qr = (Dr dH * Qr dH) * R
Тактирование счетчика производится сигналом, поступающего со схемы формирования временных интервалов каждого электроакустического канала через схему ИЛИ, выполненную на диодах. Временные интервалы в каналах по длительности равны времени прохождения ультразвука в зоне контроля от излучающего до приёмного пьезопреобразователя и задаются таймером (в каждом канале свой таймер). Таким образом, осуществляется автоматическая синхронизация сканированием электроакустическими каналами.
Для независимой адресации по магистрали ISA и от счетчика адреса используется мультиплексоры с Z состоянием выхода D8,D9,D16 К1533КП11
К1533КП11
| 2 |
DI
00
01
|
MUX
|
^
DO
0
1
2
3
|
| 3 |
| 4 |
| 5 |
DI
10
11
|
| 6 |
| 7 |
| 11 |
DI
20
21
|
| 10 |
| 9 |
| 14 |
DI
30
31
|
| 13 |
| 12 |
| 1 |
A |
| 15 |
OE |
Рисунок 14 - УГО микросхема К1533КП11.
Мультиплексор 4 - разрядный 2 → 1 с выходами
DIj0A * Dij1A при OE = 0
Doj = Z - состояние при OE = 1
где j = 0,1,2,3
Переключение адресации осуществляется по входу "А" мультиплексора сигналом выборки от дешифратора адреса, D1, D4, D6, выполненного на микросхемах К1533 ЛН1, К1533 ЛА2, К1533 ИД3. УГО, перечисленных микросхем, приведены на следующих рисунках:
К1533ЛН1
| 1 |
1
|
2 |
| 3 |
1
|
4 |
| 5 |
1
|
6 |
| 9 |
1
|
8 |
| 11 |
1
|
10 |
| 13 |
1
|
12 |
Рисунок 15 - УГО микросхема К1533ЛН1
К1533ЛА2
Рисунок 16 - УГО микросхема К1533ЛА2.
4-разрядное слово данных, с выхода микросхемы D10 поступает на вход дешифратора D13 и в зависимости от кода активизируется какой либо из выходов дешифратора.
К1533ИД3
1
2
4
8
|
DMX
|
F
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
|
1 |
| 23 |
2 |
| 3 |
| 22 |
4 |
| 5 |
| 21 |
6 |
| 7 |
| 20 |
8 |
| 9 |
| 10 |
| 11 |
| 13 |
&E
1
2
|
14 |
| 18 |
15 |
| 19 |
16 |
| 17 |
Рисунок 17 - УГО микросхема К1533ИД3.
При поступлении очередного импульса от каналов через схему ИЛИ, производится запуск следующего канала. Счетчик адреса D6 работает на вычитание загруженного кода с регистра данных D2 и по окончании счета формируется импульс заёма, по которому производится перезапись счетчика и начало нового цикла. Аналоговые сигналы с предварительных усилителей каждого канала поступают на аналоговые ключи D17,D18,D22,D23, выполненные на 4-канальных микросхемах К590 КН13. Выходы аналоговых ключей объеденены через токоограничивающие резисторы и далее через повторители напряжения поступают на выход схемы управления. Повторители напряжения выполнены на быстродействующих операционных усилителях D19, D25, типа 140УД26. Управление передачей сигнала аналоговых ключей производится кодом считываемым из ОЗУ выполненного на микросхемах D11, D12 (канал по дефекту) и D20, D21 (канал по тени). Выборка адреса осуществляется счетчиком адреса D6, как и канал сканирования генераторов имульсов возбуждения. Для независимой коммутации применено по 8 ключей в канале дефектов и канале тени 4 микросхемы К590 КН13, что позволяет варьировать как порядком подключения, так и количеством каналов.
К590КН13
DI
|
SW
|
DO
|
OE
|
DI
|
SW
|
DO
|
OE
|
DI
|
SW
|
DO
|
OE
|
DI
|
SW
|
DO
|
| OE |
Рисунок 18 - УГО микросхема К590КН13.
При появлении сигнала о дефекте, снимаемого со схемы контроля в блоке обработки информации, превышающем допустимый уровень, происходит аппаратное прерывание процессора. Процессор переходит в режим обработки прерывания и считывает адрес текущего канала через буфер D14, микросхема КР1533АП5, и переводит работу канала, где произошёл дефект в режим многократного повторения для достоверной фиксации дефекта и увеличения помехозащищенности от случайных сбоев. Выборка адреса и обращение к электроакустическим каналам по магистральной шине ISA из-за ограниченности адресного пространства сделана с последовательным доступом. В конкретном случае этот метод реализован при помощи адресного регистра D7, микросхема КР1533ТМ8. Последовательность обращения следующая: вначале по магистрали по адресу 360 (в 16-ричном коде) ISA выбирается регистр адреса D7 и в него в цикле программного обмена с устройствами ввода/вывода записывается внутренний адрес блока управления; во втором цикле производится обращение непосредственно к адресуемому узлу блока управления и производится запись или чтение информации. Цоколёвка операционного усилителя приведена на следующем рисунке
балансировка
вход(-) балансировка
вход(+) питание(+Uп) питание(+Uп)
питание(-Uп) выход
Рисунок 19-Цоколёвка КР140УД26А
Таблица 4-Основные параметры КР140УД26А.
| Параметр |
Буквенное
обозначение
|
Режим
измерения
|
КР140УД26А |
Единица
измерения
|
| не менее |
не более |
| Макс.вых. напр |
Uвых.макс |
Uп.=±15в |
± |
- |
В |
| Напр. смещения |
Uсм. |
Uп.=±15в |
- |
±30 |
мкВ |
| Входной ток |
Iвх. |
Uп.=±15в |
- |
±40 |
На |
| Разн.вход.токо |
∆Iвх. |
Uп.=±15в |
- |
35 |
нА |
| Ток потреблен. |
Iпот. |
Uп.=±15в |
- |
4,7 |
мА |
| Коэф. усиления |
Kу.u. |
Uп.=±15в |
1000 |
- |
тыс. |
| Частота ед. усиления |
F1 |
Uп.=±15в |
20 |
- |
МГц |
На микросхеме D26 КР1533ЛА3 собран задающий кварцевый генератор на частоту 10МГц.
Для обеспечения связи с внешней регистрирующей аппаратурой и для передачи информации о наличии дефекта и о номере стробимпульса применена микросхема 580ВВ55-параллельный порт ввода-вывода. Гальваническая развязка обеспечивается при помощи оптопар 3
Обращение к порту и передача информации производится в цикле ввода-вывода по системной магистрали ISA.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1. Домаркас В. Й., Пилецкас Э. Л. Ультразвуковая эхоскопия.-Л.: Машиностроение. Ленинградское отделение, 1988.- 276 с., ил.
2. Глозман И. А. Пьезокерамика. Изд. 2-е, перераб. М., "Энергия",1972.-288 с. с ил.
3. Журнал "Дефектоскопия". Главный редактор член-корр. АН СССР М. Н. Михеев. Свердловск, ГСП-170, ул. С. Ковалевской, 18.
4. Гусев В. Г., Гусев Ю. М. Электроника: Учебное пособие для приборостроит. спец.--2-е изд., перераб. и доп.-М.: Высш. шк. 1991.-622 с.: ил.
5. Пейтон А. Дж., Волш В. Аналоговая электроника на операционных усилителях. Издательство "Бином", 1994 г. Москва, ул. Новослободская, д. 50/1, стр. 1а.
6. Хоровиц П., Хилл У. Искуство схемотехники. Издательство "Мир" Государственного комитета Российской федерации по печати. 129820, Москва, И-110, ГСП, 1-й Рижский пер.,2
7. Новиков Ю.В. и др. . Разработка устройств сопряжения для персонального компьютера типа IВМ РС: Ю.В. Новиков, О.А. Калашников, С.Э. Гуляев; Под. ред. Ю.В. Новикова, - М. ЭКОМ, 1997 г. – 224 с.; 15 р.
8. Пухальский Г.И. и др. Цифровые устройства: Учебное пособие/ Г.И. Пухальский, Т.Я. Новосельцева, - Санкт-Петербург, Политехника, 1996 г. – 885 с.
9. Рафикузаман М. Микропроцессоры и машинное проектирование микропроцессорных систем: В 2-х кн. Кн.1. Пер с англ.- М. Мир,1988 г.- 312 с.; 2р 30к, 50000 экз.
10. Рафикузаман М. Микропроцессоры и машинное проектирование микропроцессорных систем: В 2-х кн. Кн.2. Пер с англ.- М. Мир,1988 г.- 288 с.; 2р 10к, 50000 экз.
11. Фетисов И.Н. и др. Безопасность и экологичность проекта: Методические указания к дипломному проектировани/ И.Н. Фетисов, Е.В. Сафонов,
12. Г.В. Тягунов, - Екатеринбург: УПИ, 1992 г. – 18 с.; 300 экз.
13. Хвощ С.Т. и др. Микропроцессоры и микроЭВМ в системах автоматического управления: Справочник/ С.Т. Хвощ, Н.Н. Варлинский, Е.А. Попов; Под. ред. С.Т. Хвоща, Ленинград, Машиностроение, 1987 г .- 640 с.;
14. Шевкопляс Б.В. Микропроцессорные структуры. инженерные решения:
15. Справочник, - М. Радио и связь, 1990 г. – 512 с.;2 р 50к., 100000 экз.
16. Руководство по применению РД 11 0553-86. Микросхемы интегральные
17. ГОСТ 2.746-68. Обозначения условные графические в схемах. Генераторы и усилители квантовые. – М.: Изд. Стандартов, 1988
18. ГОСТ17.2.1.01-76. Охрана природы. Атмосфера. Классификация выбросов по составу.
19. ГОСТ17.2.3.13-86. Охрана природы. Гидросфера. Общие требования к охране поверхностных вод.
20. ГОСТ12.0.003-74.ССБТ. Опасные и вредные производственные факторы.
21. ГОСТ12.0.003-77.ССБТ. Опасные и вредные факторы. Классификация.
22. ГОСТ12.1.030-81.ССБТ. Защитное заземление. Зануление.
23. ГОСТ12.1.004-85.ССБТ. Пожарная безопасность. Общие требования.
24. ГОСТ12.4.009-85.ССБТ. Пожарная техника для защиты объектов. Общие требования.
25. ОНТП24-86. Общесоюзные нормы технологического проектирования. Определение категорий помещений и зданий по взрывопожарной и пожарной опасности.
26. СНиП2.01.02-85. Противопожарные нормы и правила.
27. ГОСТ12.2.049-80.ССБТ. Оборудование производственное. Общие эргономические требования.
28. ГОСТ12.2.032-78.ССБТ. Рабочее место при выполнении работ сидя. Общие эргономические требования.
29. ГОСТ 12.1.019-79.ССБТ. Электробезопасность. Общие требования.
30. СНиП 11-4-79. Строительные нормы и правила. Нормы проектирования. Естественное и искусственное освещение.
31. ГОСТ12.2.007-75.ССБТ. Изделия электротехнические. Общие требования безопасности.
32. ГОСТ 3.1103-82. Основные надписи.
33. ГОСТ 3.1104-81. Общие требования к формам, бланкам и документам.
34. ГОСТ 3.1105-84. Формы и правила оформления документов общего назначения.
35. ГОСТ2.702-75.ЕСКД. Правила выполнения электрических схем.
36. ГОСТ 8.417-81. Единицы физических величин.
37. ГОСТ 2.301-68. ЕСКД. Форматы.
38. ГОСТ2.728-74.ЕСКД. Резисторы, конденсаторы.
39. ГОСТ2.730-73.ЕСКД. Приборы полупроводниковые.
40. ГОСТ2.755-74.ЕСКД. Устройства коммутационные и контактные соединения.
41. ГОСТ 2.701-81. ЕСКД. Обозначения буквенно-цифровые в электрических схемах.
42. ГОСТ 2.708-81. ЕСКД. Правила выполнения электрических схем цифровой вычислительной техники.
43. СНиП 2.04.05-86. Предельно допустимые концентрации на производственных предприятиях.
44. ГОСТ 12.1 070-75. Основные надписи.
45. ГОСТ 12.1.035-81. ССБТ. Пожарная безопасность объектов с электросетями.
46. ГОСТ 12.1.005-81 ССБТ. Воздух рабочей зоны Общее требование.
47. ГОСТ12.1.038-82.ССБТ Предельно допустимые уровни напряжений прикосновения.
48. СНиП 952-75 Санитарные правила процесса пайки мелких деталей сплавами содержащие свинец.
49. СНиП 245-71. Санитарные нормы проектирование промышленных предприятий.
|