| Банк рефератов содержит более 364 тысяч рефератов, курсовых и дипломных работ, шпаргалок и докладов по различным дисциплинам: истории, психологии, экономике, менеджменту, философии, праву, экологии. А также изложения, сочинения по литературе, отчеты по практике, топики по английскому. |
|
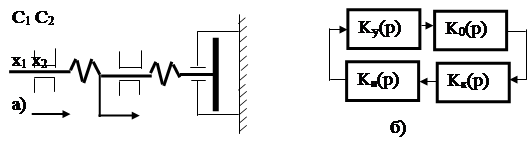
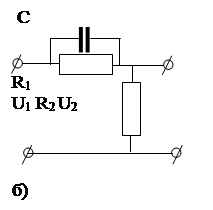
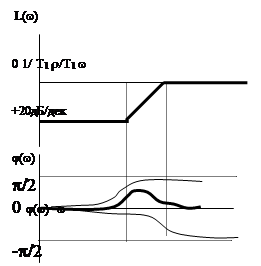
Работа дифференцирующего корректирующего устройства. Введение интегрирующего корректирующего устройства уменьшает коэффициент усиления на высоких частотах, что уменьшает действие помех, но ухудшает переходный процесс. Интегро-дифференцирующее корректирующее устройство. Схема интегро-дифференцирующего корректирующего устройства приведена на рис. 3б
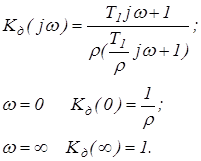
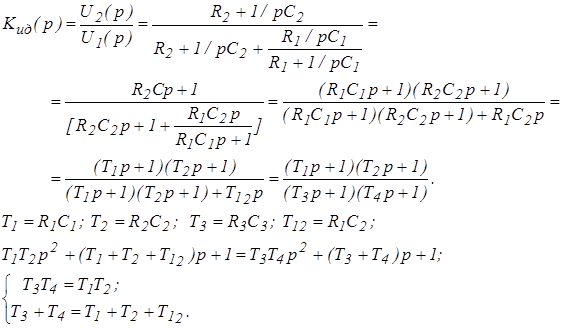
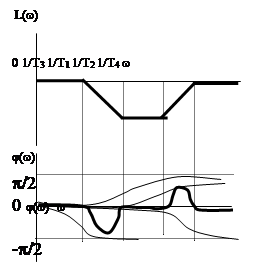
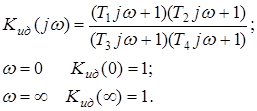
Рис. 3 Для интегро-дифференцирующего контура, обычно С2 > С1 . В области низких частот С1 можно пренебречь, и контур работает как интегрирующий, а в области высоких частот С2 можно пренебречь, и контур работает как дифференцирующий. (В ТАУ НЧ 0 £ w £ 5 с-1 ; СЧ 5 £ w £ 50 с-1 ; ВЧ 50 £ w £ ¥ с-1 ). Передаточная функция цепи, представленной на рис. 3б имеет вид
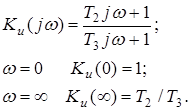
Частотные характеристики цепи, приведены в таблице 3. Таблица 3
Работа интегро–дифференцирующего корректирующего устройства.Интегро-дифференцирующее корректирующее устройство в области низких частот работает как интегрирующее, а в области высоких частот как дифференцирующее, поэтому оно совмещает достоинства интегрирующего и дифференцирующего устройств. За счет уменьшения коэффициента усиления на низких частотах увеличивается запас устойчивости. За счет положительного фазового сдвига, вносимого контуром, увеличивается частота среза, а значит, уменьшается время регулирования, т. е. повышается быстродействие системы. 3. Методы синтеза последовательных корректирующих устройств При расчете параметров корректирующих устройств можно использовать любой из методов определения качества, но наиболее часто используют частотные методы, в частности, логарифмические частотные характеристики.Рассмотрим, как по виду ЛАЧХ можно судить о качестве переходного процесса (рис. 4).
Характеристику разбивают на три части: НЧ - определяет статику; СЧ - определяет динамику; ВЧ – не играет роли. Точка пересечения ЛАЧХ с осью абсцисс характеризует частоту среза - w с . 1. Время переходного процесса является функцией частоты среза tп = f( w с ); tп = c/ w с .2. Число перерегулирований является функцией угла пересечения ЛАЧХ оси абсцисс N = f( a ) . Обычно N = 2¸3, при этом a »-20 дБ/дек.3. Величина перерегулирования является функцией запаса устойчивости по амплитуде – L . s % = f(L) . Обычно s % = 20¸30, при этом L »20 дБ.4. Порядок синтеза последовательного корректирующего устройства Порядок синтеза последовательного корректирующего устройства рассмотрим на конкретном примере. Пример 1. Дана система, схема которой приведена на рис. 5. Пусть T1 = 1 c, T2 = 0,1 c, kv = 10 c-1 . Необходимо синтезировать последовательное корректирующее устройство, обеспечивающее следующие показатели качества: 1. Величина статической ошибки e с = 0. 2. Частота среза желаемой системы w сж = 1 с-1 .3. Величина относительного перерегулирования s % = 20 ¸ 30.4. Число перерегулирований N = 2 ¸ 3.
Решение: 1. Строим ЛАЧХ заданной (реальной) системы (рис. 6).
Строим ЛАЧХ желаемой системы исходя из следующего: - для обеспечения требуемого времени переходного процесса ЛАЧХ желаемой системы должна пересекать ось абсцисс в точке w сж = 1с-1 . -для обеспечения требуемого числа перерегулирований N = 2 ¸ 3 угол пересечения ЛАЧХ оси абсцисс должен равняться a »-20 дБ/дек.- для обеспечения требуемой величины перерегулирования s % = 20¸30 запас устойчивости по амплитуде должен равняться L = ±20 дБ. -для обеспечения требуемой величины статической ошибки e с = 0 логарифмическая характеристика желаемой системы в области низких частот должна иметь наклон –20 дБ/дек. 3. Сочленяем ЛАЧХ исходной Lр ( w ) и желаемой системы Lж ( w ) в области низких и высоких частот. 4. Вычитаем из ЛАЧХ исходной Lр ( w ) ЛАЧХ желаемой системы Lж ( w ), и получаем ЛАЧХ корректирующего устройства Lку ( w ). 5. По виду ЛАЧХ корректирующего устройства Lку ( w ) определяем его структуру и параметры. Для рассматриваемого примера, корректирующее устройство представляет собой интегро-дифференцирующее звено, передаточная функция имеет вид:
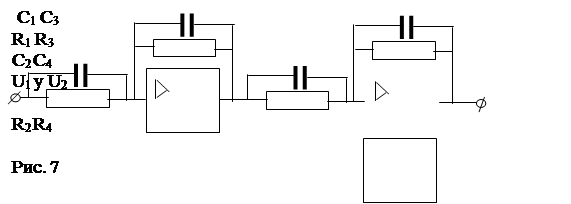
В зависимости от величин постоянных времени схемная реализация корректирующего устройства может быть различной: - при 0 £ Ti £ 10 c-1 можно использовать пассивный RC –четырех-полюсник (рис. 3б); - при 10 c-1 £ Ti £ 100 c-1 можно использовать активный фильтр (рис. 7); - при Ti > 100 c-1 можно использовать цифровой фильтр.
6. Записываем передаточную функцию скорректированной системы, строим переходный процесс и определяем показатели качества, если они удовлетворяют необходимым показателям, то процесс синтеза окончен. 5. Параллельные корректирующие устройства Параллельные корректирующие устройства используются в виде местных, охватывающих отдельные элементы систем, и главных обратных связей. При этом в основном используются отрицательные обратные связи (ООС), повышающие устойчивость систем. Положительные обратные (ПОС) связи иногда используют как местную обратную связь для повышения коэффициента усиления на каком-либо участке системы. Корректирующие обратные связи бывают гибкие и жесткие. Жесткие ООС (ЖООС) действуют как в переходном, так и установившемся режиме. В качестве ЖООС используются следующие звенья:
Гибкие ООС (ГООС) действуют только в переходном режиме (пропускают высокочастотные составляющие сигнала и не пропускают низкочастотных). В качестве ГООС используются следующие звенья:
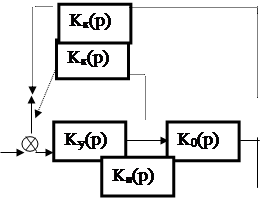
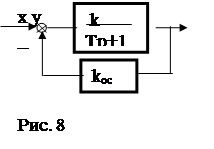
Рассмотрим влияние обратной связи на параметры звеньев (к и Т ). Пример 2. Для заданной системы (рис.8). Определить влияние ЖООС на параметры звеньев.
Решение: Передаточная функция замкнутой системы равна:
Охват инерционного звена ЖООС уменьшает постоянную времени звена и его коэффициент усиления. Литература 1. Бронштейн И.Н., Семендяев К.Н. Справочник по математике для инженеров и учащихся вузов. — М.: Наука,1986. 2. Егоров А.И., Ким Дмитрий Теория автоматического управления. Том 1. Линейные системы. ФИЗМАТЛИТ®, 2007. – 312с. 3. Ким Д.П. Теория автоматического управления. Том 2. Многомерные, нелинейные, оптимальные и адаптивные системы. ФИЗМАТЛИТ®, 2004. 4. Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем. БХВ-Петербург, 2004. – 640с.
Смотреть все комментарии (21) Работы, похожие на Контрольная работа: Коррекция систем автоматического управления Назад
|
|
|
|
|
| |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||