| Федеральное агентство по образованию
ПЕНЗЕНСКАЯ ГОСУДАРСТВЕННАЯ ТЕХНОЛОГИЧЕСКАЯ АКАДЕМИЯ
КУРСОВОЙ ПРОЕКТ
по дисциплине:
«Автоматизация технологических процессов и производств»
Тема работы:
«Разработка автоматизированной системы управления многоступенчатых, регенеративных прогревателей питательной воды»
Выполнил: студент гр. 03А1
Егоров И.В.
Проверил: Прошин И.А.
Пенза 2007г.
 СОДЕРЖАНИЕ СОДЕРЖАНИЕ
Введение
Исходные данные
Принципиальные и функциональные схемы системы
Разработка математической модели системы
Оценка наблюдаемости, управляемости и устойчивости
Синтез системы
Синтез САУ методом динамической компенсации
Синтез САУ методом последовательной коррекции с подчиненным
регулированием координат
Модальное управление
Метод синтеза с использованием оптимизационных процедур
Заключение
Литература
Введение
Мы рассматриваем вопрос о регенеративном подогреве питательной воды в одной ступени. Можно подогрев разбить на несколько последовательных ступеней, подогревая воду в каждой из ступеней паром из отбора, имеющего давление, отвечающее температуре подогрева в данной ступени.
Максимальная экономия достигается, как видно из фиг. 18, при подогреве питательной воды до температуры около 120°. Расход тепла в паре при конденсационном режиме без отбора 3100 ккал/квтч, при отборе пара 2 ата для подогрева воды до 120° расход тепла падает до 2920 ккал ]квтч, или на 5,5%. Это снижение расхода тепла связано с тем, что только 80% пара расширяется до конечного давления 0,04 ата, а 20 % отбираются при 2 ana и вырабатывают энергию на внутреннем тепловом потреблении станции.
Даже при высоком подогреве воздуха и сильно развитом регенеративном подогреве питательной воды на котельных агрегатах устанавливаются водяные экономайзеры, позволяющие повысить к. п. д. котлоагрегата за счет снижения температуры уходящих газов.
Для определения теоретического расхода пара на выработку 1 кдж электроэнергии при регенеративном подогреве питательной воды служит" формула (в случае двух отборов пара)
Более глубокое охлаждение продуктов горения в водяном экономайзере не представляется возможным, так как при развитом в настоящее время регенеративном подогреве питательной воды ее температура при входе в котел составляет 200° С и больше. При этой температуре продукты горения в водяном экономайзере нельзя охлаждать ниже чем до 250° С. Следовательно, воздух для горения является единственно возможной средой, которая 'позволяет охладить продукты горения до низкой температуры. Процессы горения и предварительной подготовки ряда топлив существенно интенсифицируются при предварительном подогреве используемого в этих процессах воздуха. Кроме того, при развитом в современных паросиловых станциях регенеративном подогреве питательной воды (паром из промежуточных отборов турбин) последняя приходит в котельную с относительно высокой температурой. Ввиду этого, а также в связи с переносом (в крупных котельных агрегатах значительной части кипятильных труб в топку, экономайзер даже при предельном бго развитии не всегда может осуществить нужную степень охлаждения уходящих из агрегата газов. Весь этот комплекс обстоятельств вьщвал необходимость включения в номенклатуру поверхностей нагрева современных котлоагрегатов еще одной поверхности, воздухоподогревателями, фиг. 4), в котором за счет дополнительного охлаждения продуктов сгорания подогревается подаваемый в топку воздух.
При отборе пара на подогрев конденсата, с одной стороны, уменьшается расход удельной теплоты qt на получение пара, но с другой, одновременно и уменьшается удельная работа пара /0 в турбине. Несмотря на противоположный характер этих влияний, отбор всегда повышает т),. Это объясняется тем, что при подогреве питательной воды за счет теплоты конденсации отобранного пара устраняется подвод теплоты от внешнего источника на участке 4-4' и таким образом средняя температура подвода теплоты от внешнего источника в регенеративном цикле увеличивается (подвод внешней теплоты осуществляется только на участке 4'-5-6-1).
Возможный прирост мощности за счет отключения ПВД значителен и характеризуется достаточно высокими экономическими показателями для покрытия пиков графика нагрузки. Задача эффективного участия блока в выработке пиковой и полупиковой нагрузки в будущем может полностью решаться при отключении ПВД и подогреве питательной воды до нормальной температуры за счет теплоты отходящих газов из ГТУ, введенной в состав блока для этой цели. При этом мощность ГТУ получается такой же или больше, чемДЛ^ за счет отключения ПВД, а удельный расход теплоты на выработку дополнительной мощности становится даже меньше на несколько процентов, чем при номинальном расчетном режиме работы блока.
Однако, каждый добавочный отбор пара как при постоянном конечном подогреве, так и при возрастающем наивыгоднейшем конечном подогреве все в меньшей степени повышает тепловую экономичность установки, так как с увеличением числа ступеней подогрев в каждой ступени и влияние каждой из ступеней на тепловую экономичность установки падают. Чем больше число отборов, тем выше к. п. д. регенеративного цикла при неизменном или наивыгоднейшем конечном подогреве питательной воды. Однако, с увеличением числа отборов при неправильном выборе конечного подогрева, например, при необоснованно резком его снижении, к. п. д. может упасть.
Многоступенчатый подогрев. Подогрев питательной воды до заданной конечной температуры можно осуществить, используя пар из одного отбора соответствующего возможно низкого давления. Если распределить заданный подогрев воды между несколькими подогревателями, используя также отборы более низкого давления, то уменьшится подогрев в первом подогревателе высокого давления и расход пара на этот подогреватель из первого отбора. Суммарное количество отбираемого пара при заданном подогреве питательной воды почти не зависит от числа отборов (тепло, выделяемое при конденсации 1 кг греющего пара любого отбора, почти постоянно). Однако, выработка электроэнергии отбираемым паром при включении отборов более низкого давления существенно повышается благодаря увеличению теплопадения пара, отбираемого при более низком давлении. Соответственно уменьшаются общий расход пара на турбину заданной мощности, пропуск пара в конденсатор и потеря тепла в нем
1 ПРИНЦИПИАЛЬНЫЕ И ФУНКЦИОНАЛЬНЫЕ СХЕМЫ СИСТЕМЫ
ДПТ в настоящее время основной тип двигателя, используемый в автоматизированных системах управления. Обмотки этой машины, образующие цепь якоря и возбуждения, получают питание от источника постоянного тока. Необходимым условием непрерывного процесса электромеханического преобразования является протекание по части обмотки машины переменного тока. Выполнение этого условия в МПТ обеспечивается работой коллектора, коммутирующего постоянный ток, поступающего в якорную цепь со стороны источника питания, равной частоте вращения ротора.
Принципиальная схема МПТ имеет следующий вид:

Рисунок 1
Двигатель постоянного тока состоит из двух частей: неподвижной – статора, на котором размещается индуктор с обмоткой возбуждения, и якоря с якорной обмоткой, напряжение на которую подводится через контроллер. Якорь ДПТ имеет момент инерции JД
. Присоединяемые к якорю рабочие органы машины с моментом инерции JР
увеличивают суммарный момент
Механическая часть схемы:

Рисунок 2
Тогда эквивалентная схема выглядит так:
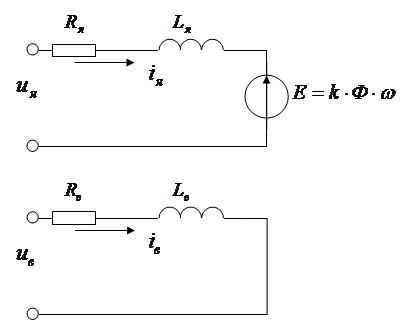
Рисунок 3
инерции на валу якоря ДПТ: J= JД
+ JР
. Со стороны рабочей машины на якорь действует момент сопротивления МС
.
Подаваемое на обмотку возбуждения постоянное напряжение обеспечивает создание магнитного потока Ф. В результате взаимодействия тока якоря, возникающего в результате подключения к цепи якоря источника постоянного напряжения, и этого магнитного потока на валу двигателя образуется двигательный момент М. Под разностью моментов М-МС
якорь ДПТ вращается с угловой скоростью щ. При вращении якоря в магнитном поле, создаваемом обмоткой возбуждения, в цепи якоря наводится электродвижущая сила, уравновешивающая прикладываемое к нему напряжение.
Обмотки якоря и возбуждения намотаны медным проводом и обладают активными сопротивлениями и индуктивностями.
Энергетическая диаграмма ДПТ:
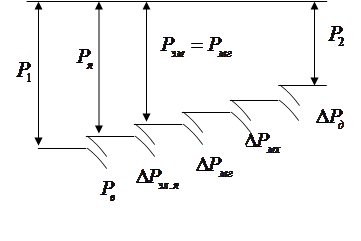
Рисунок 4
Электрическая машина постоянного тока, работающая в двигательном режиме, преобразует электрическую энергию Р1
, потребляемую от источника постоянного напряжения, в механическую на валу двигателя Р2
. При этом часть мощности Р1
идет на возбуждение, а часть теряется в виде электрических потерь в цепи якоря. Оставшаяся мощность составляет электромагнитную мощность якоря, которая преобразуется в механическую мощность. Потери магнитные, добавочные и механические покрываются за счет механической мощности. Оставшаяся часть мощности представляет полезную механическую мощность, которая обычно указывается в справочниках.
Непосредственный преобразователь электрической энергии - статическая система с полупроводниковыми переключающими устройствами, преобразующая параметры электрической энергии (количество фаз, частоту, амплитудное и действующее значение напряжения, фазовый сдвиг) путем формирования выходного напряжения каждой фазы непосредственно из отдельных участков входного напряжения без промежуточного преобразования параметров электрической энергии.
Непосредственный преобразователь электрической энергии как объект управления в соответствии с предлагаемым подходом представляет собой дискретную нелинейную систему, выходными координатами которой являются величина, фаза, частота и форма выходного напряжения, входного и выходного тока, возмущающие воздействия - изменения параметров входного напряжения, управляющие воздействия - системы двух переключающих функций: амплитуды и фазы.
Все функции по управлению в ВЭМС можно разделить на две группы:
· управление по отработке НПЭ внешних управляющих воздействий;
· управление преобразованием электрической энергии.
Вентильный преобразователь независимо от принципа управления и выполняемых функций обеспечивает управление ТО путем воздействия на процесс преобразования параметром электрической энергии. Для удовлетворения всех требований при организации управления процессом преобразования энергии в электромеханических системах вентильные преобразователи должны обеспечивать с помощью управляющих воздействий управление формой, амплитудой, частотой и фазой напряжений на выходе силового блока преобразователя электрической энергии.
Такие воздействия в соответствии с предлагаемым подходом и ММ НПЭ могут быть обеспечены по двум каналам путем задания переключающих функций.
В основе рассмотренного ВП положена тиристорная шестипуьсная мостовая схема.
Принципиальная схема системы ВП-МПТ имеет следующий вид:
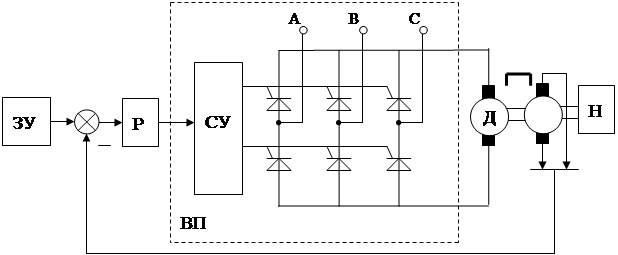
Рисунок 5
Здесь СУ – система управления, Р – регулятор, ЗУ – задающее устройство.
2 РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ СИСТЕМЫ
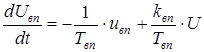
Цепь ВП можно описать следующим дифференциальным уравнением:
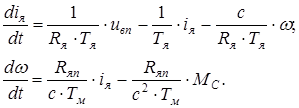
МПТ для данной системы описывается следующими дифференциальными уравнениями:
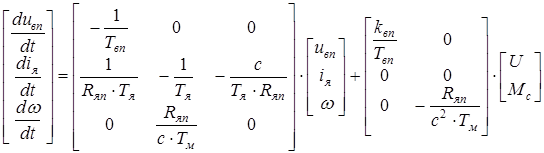
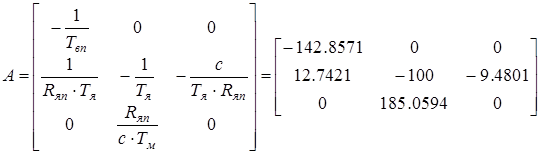
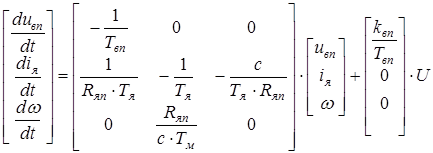
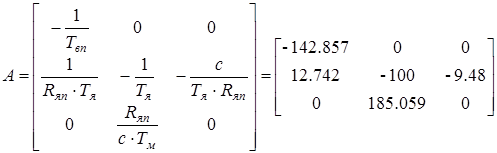
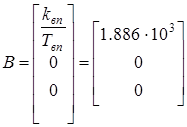
Имея данные уравнения можно записать ММ пространства состояния в нормальной форме Коши системы ВП-МПТ:
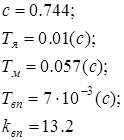
Проведем идентификацию ММ:
1. Температурный коэффициент.

2. Сопротивление обмотки возбуждения в нагретом состоянии.

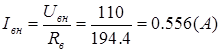
3. Номинальный ток обмотки возбуждения.
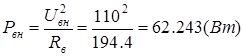
4. Номинальная мощность обмотки возбуждения.
5. Номинальная мощность обмотки якоря.

6. Номинальный ток обмотки якоря.

7. Номинальная угловая скорость при известной частоте вращения.

Обозначим С=к*Фн и вычислим как отношение номинальной ЭДС двигателя к номинальной угловой скорости.


8. Номинальное сопротивление цепи якоря.
9. Относительное сопротивление цепи якоря.
10. Номинальный момент нагрузки двигателя.

11. Момент, развиваемый двигателем, идет на покрытие механических потерь и преодоление момента сопротивления нагрузки.

12. Общая мощность на валу двигателя.

13. Мощность электрических потерь.

14. Номинальная мощность.

15. Выбор тиристоров осуществляется по току и напряжению: ток после мостовой схемы должен превышать якорный на 20%; напряжение так же должно быть больше в 1,4 раза напряжения цепи якоря

При использовании управляющего напряжения 10В получаем следующие параметры:

Структурная схема данной ММ имеет вид:

Рисунок 6
Здесь РС – регулятор скорости.
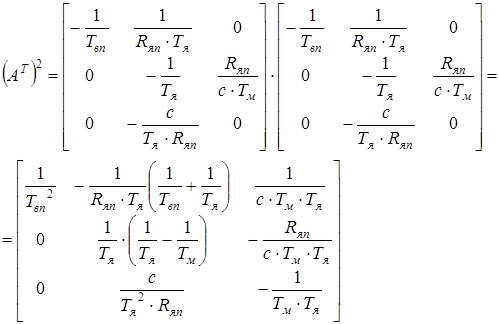
Для нахождения ММ вход-выход необходимо отыскать обратную матрицу:

Нахождение присоединенной матрицы:
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 . .
Присоединенная матрица имеет вид:
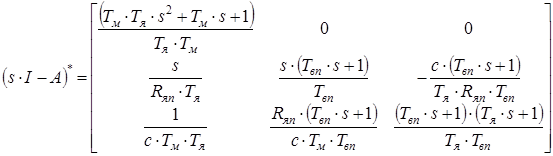
Тогда обратная матрица:


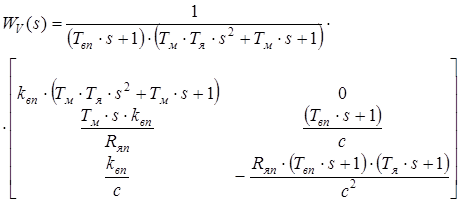
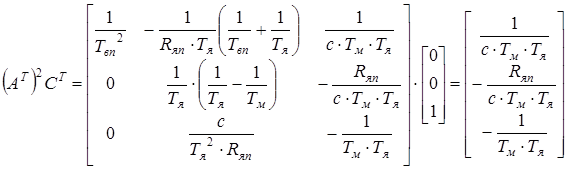
Передаточная матрица вход-состояние примет вид:

Передаточная матрица вход-выход имеет вид:

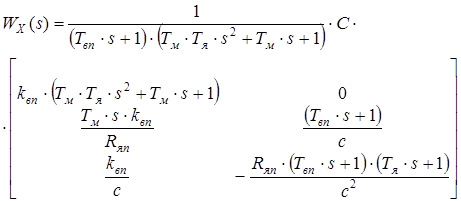


Тогда:


3 ОЦЕНКА НАБЛЮДАЕМОСТИ, УПРАВЛЯЕМОСТИ И УСТОЙЧИВОСТИ
ММ системы в общем виде:
Так как устойчивость, управляемость и наблюдаемость МПТ определяется только для входного воздействия  , то: , то:

Следовательно:
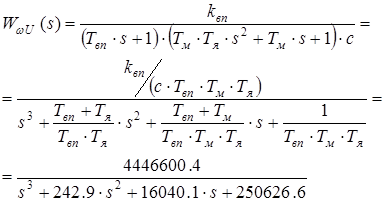
ПФ системы по входному воздействию :

Устойчивость – свойство системы, характеризующее ее способность возвращаться в исходное состояние при снятии с системы возмущающего воздействия, которое вывело ее из этого состояния.
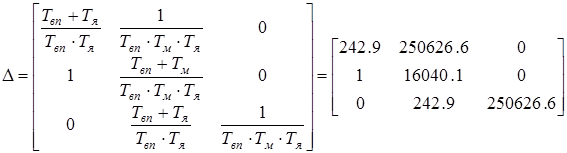
Определим устойчивость разомкнутой системы по критерию Рауса-Гурвица. При положительности коэффициентов характеристического полинома необходимым и достаточным условием устойчивости системы является положительность определителей.
Представим ПФ в виде:
Определитель Гурвица для данной системы:
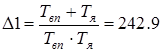 - положителен; - положителен;
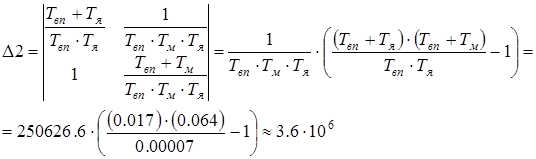
- положителен;
- положителен.
По определению если коэффициенты характеристического полинома и определители положительные, то система устойчивая. Следовательно: система устойчивая.
Управляемость – выяснение возможности системы переходить в любое заданное состояние при воздействии на него задающим сигналом ограниченной амплитуды.
Система называется полностью управляемой по состоянию (выходу), если изначальное состояние  соответствует любому t0
она может быть переведена в любое качественное состояние за конечное время, ограниченным входным сигналом соответствует любому t0
она может быть переведена в любое качественное состояние за конечное время, ограниченным входным сигналом 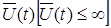 . .
Для того чтобы система была управляема по входу необходимо и достаточно, что бы ранк матрицы управляемости был равен размерности вектора  . .

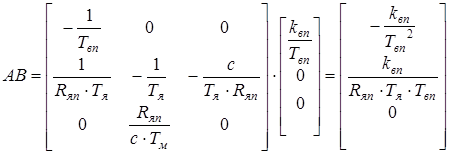 
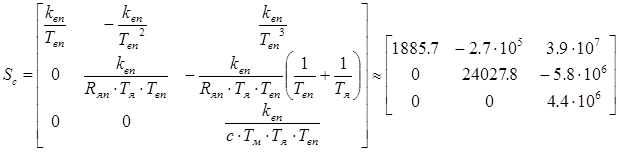
Ранк определяется порядком старшего минора, не равного нулю.
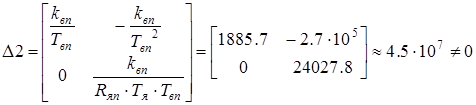

Можно сделать вывод, что система по входу полностью управляема.
Определим управляемость системы по выходу.

Здесь для управляемости системы ранк матрицы  должен равняться количеству выходов. должен равняться количеству выходов.


Выход так же один (частота вращения щ), поэтому система по выходу так же управляема.
Наблюдаемость – это вычисление вектора состояния по измеренным значениям выходных координат.
Матрица наблюдаемости:

Для того чтобы система была наблюдаема необходимо и достаточно, что бы ранг матрицы наблюдаемости был равен размерности вектора .




Ранк определяется порядком старшего минора, не равного нулю.


Можно сделать вывод, что система наблюдаемая.
4 СИНТЕЗ РЕГУЛЯТОРА СКОРОСТИ В СИСТЕМЕ «МАШИНА ПОСТОЯННОГО ТОКА – ВЕНТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ»
Цель синтеза – построение системы управления ТО, выходные управляемые координаты которого ковариантные с заданием и инвариантные к возмущающему, обеспечивающий устойчивость и робастность системы в целом.
Система управления обеспечивает ковариантность управляемой величины с заданием. Система регулирования обеспечивает инвариантность к возмущению, поэтому основная задача синтеза оптимальных алгоритмов управления – построение ММ системы управления, обеспечивающей воспроизведение заданного воздействия, а регулирование – подавление возмущающего с учетом случайного неконтролируемого их характера и неточности задания ММ объекта или возможного случайного ее изменения.
Для решения задачи синтеза находят применение методы классического вариационного счисления, динамического программирования, принцип Максина – Панкрягина.
Для синтеза регуляторов в ТАУ и ее приложениях разработаны методы:
· синтез систем автоматического регулирования по АЧХ;
· метод динамической компенсации;
· метод уравнений синтеза;
· аналитическое конструирование регуляторов;
· модальное управление;
· метод расширенных АЧХ;
· метод последовательной коррекции с подчиненным регулированием координат.
В постановках задач синтеза САУ задается множество систем, на котором проводится выбор системы или некоторого подмножества систем, удовлетворяющих заданным показателям качества. Требования поведения систем задается как множество эталонных систем, поведение которых отвечает заданному поведению САУ в установившемся и переходном режиме. Описание подмножества строится на поведенческом языке, определяющего качественно и количественно свойства САУ: устойчивость, ковариантность, точность, инвариантность, робастность, быстродействие.
Синтез САУ обеспечивает 2 задачи:
· формирование множества эталонных систем с заданными свойствами;
· выбор САУ и расчет параметров соответствующей эталонной системы.
Средствами решения задач синтеза является:
· выбор топологии причинно-следственных связей САУ;
· выбор структур операторов элементов (алгоритмов управляющих или регулирующих устройств);
· расчет значений параметров САУ (значение параметров управляющих или корректирующих устройств).
4.1 Синтез САУ методом динамической компенсации
Синтез регулятора предполагает компенсацию динамики объекта. Основным содержанием принципа динамической компенсации является возможность не учитывать динамику объекта при синтезе регулятора. Формальное выражение для компенсатора дает точное решение задач синтеза регулятора. Но в инженерных расчетах это выражение не верно и сводится к той или иной форме аппроксимации.
Дано:
1. ПФ объекта управления:

2. Структура замкнутой САУ с последовательным включением с ОУ в прямой цепи контура управления компенсирующего регулятора:
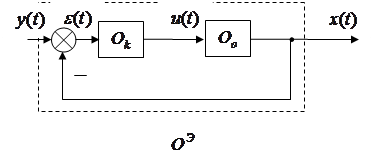
Рисунок 7
3. Требуемы показатели качества:
Перерегулирование, %
Время регулирования, с
Порядок астатизма1
Определить:
1. Эталонный оператор системы, который обеспечивает заданные показатели качества;
2. Структурный и параметрический синтез компенсирующего регулятора.
1 этап:
Определение структуры и параметров регулятора.
При определении следует соблюсти соотношение:
Для обеспечения астатизма первого порядка ( ) приравняем: ) приравняем:

Тогда:


Здесь:
2 этап:
Структурный и параметрический синтез.

Запишем ПФ компенсатора в следующем виде:

3 этап:
Моделирование синтезированной САУ.
Запишем ПФ ОУ в виде:
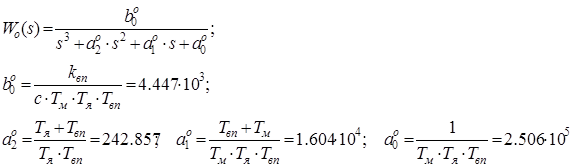

Рисунок 8

Составим дифференциальные уравнения по схеме, изображенной на рисунке 8:

По данным ДУ составим структурную схему ММ в пространстве состояний в нормальной форме:

Рисунок 9
Составленная по данной структурной схеме ММ выглядит следующим образом:
Моделирование синтезированной системы дает положительный результат, то есть необходимы показатели качества достигнуты. По данной ММ построены временные и частотные характеристики, оценены показатели качества в приложении 1.
4.2 Синтез САУ методом последовательной коррекции с подчиненным регулированием координат
Основу метода последовательной коррекции с подчинённым регулированием координат составляют два принципа.
Первый принцип – принцип подчинённого каскадного включения регуляторов отдельных координат состояния заключается в выборе замкнутых внутренних контуров регулирования, подчинённых общей задаче регулирования управляемой координаты. При этом выбор замкнутых внутренних контуров производится из условия формирования такой передаточной функции объекта управления в каждом контуре, при которой синтез последовательно включенных регуляторов контуров возможен в классе типовых линейных законов управления ограниченной сложности.
Второй принцип – принцип последовательной компенсации средних и больших постоянных времени контуров регулирования основан на последовательной замене исходного разомкнутого контура регулирования последовательностью результирующих контуров с желаемыми передаточными функциями. Выбор разомкнутых контуров в виде последовательного соединения интегрирующего и апериодического звена с малой некомпенсируемой постоянной времени обеспечивает высокую точность (астатическое регулирование) и высокое быстродействие системы.
В качестве внутренних регулируемых координат состояния при управлении в ВЭМС выбирают токи, напряжения и частоту питания и на выходе НПЭ, потокосцепления ЭМП, угловую скорость и момент на валу ЭМП, положение вала приводного механизма и др., что позволяет вводить независимые ограничения на эти координаты.
Для начала необходимо упростить структурную схему системы "Вентильный преобразователь – машина постоянного тока", показанную на рисунке 10. Для этого пренебрегаем обратной связью в цепи с МПТ.
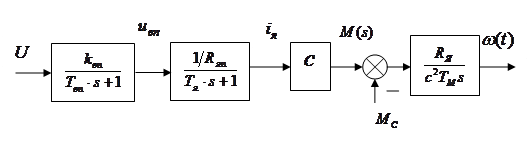
Рисунок 10
Для первого контура входным является напряжение на входе в ВП  , а выходным – ток цепи якоря , а выходным – ток цепи якоря  . Постоянная времени ВП является некомпенсируемой, так как она намного меньше остальных постоянных времени. Структурная схема будет выглядеть так: . Постоянная времени ВП является некомпенсируемой, так как она намного меньше остальных постоянных времени. Структурная схема будет выглядеть так:
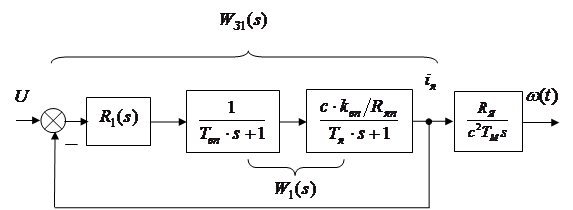
Рисунок 11
Желаемая ПФ данного контура с обеспечением заданных показателей качества будет следующей:
Здесь а1
– параметр, влияющий на перерегулирование. Для обеспечения  этот параметр принимает значение 2. этот параметр принимает значение 2.
Для нахождения ПФ первого регулятора произведем следующие действия:


 - пропорциональная часть; - пропорциональная часть;
 - интегрирующая часть. - интегрирующая часть.
Данный регулятор – ПИ-регулятор.
ПФ замкнутого контура  представляет собой колебательное звено и может быть аппроксимировано следующим образом: представляет собой колебательное звено и может быть аппроксимировано следующим образом:
 . .
Для второго контура структурная схема выглядит так:

Рисунок 12
Желаемая ПФ второго разомкнутого контура (а2
=2):
 . .
 . .
Тогда ПФ второго регулятора:
Здесь присутствует только пропорциональная часть:
 . .
Следовательно, второй регулятор – П-регулятор.
Анализ синтезированной системы будем проводить по следующей структурной схеме, то есть с вновь введенной обратной связью:

Рисунок 13
Здесь:
 - выход с первого регулятора; - выход с первого регулятора;
 - напряжение на выходе вентильного преобразователя; - напряжение на выходе вентильного преобразователя;
 - ток якоря; - ток якоря;
 - угловая скорость. - угловая скорость.
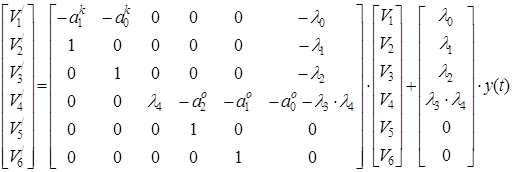
Для составления ММ в пространстве состояний необходимо схему на рисунке 13 представить во временной области.

Рисунок 14
Уравнение ММ в пространстве состояний запишем по рисунку 14:
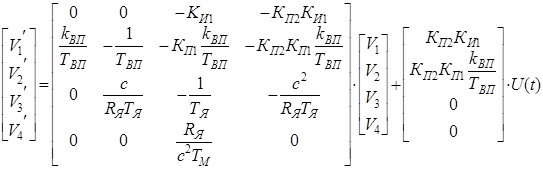

По данной ММ построены временные и частотные характеристики, оценены показатели качества в приложении 2.
4.3 Модальное управление
Модальное управление – это управление посредством динамической обратной связи с матрицей коэффициентов  модами (собственными числами, корнями характеристического полинома) для достижения желаемых целей. модами (собственными числами, корнями характеристического полинома) для достижения желаемых целей.
Необходимо обеспечить следующий желаемый спектр:
 , ,
где  , ,  для обеспечения заданных показателей качества. Тогда: для обеспечения заданных показателей качества. Тогда:

Исходная система имеет вид:
 , ,
 , ,
 , ,
 . .
Произведем следующую последовательность действий:
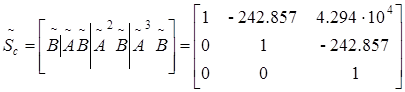
1. Трансформация исходной системы к канонически управляемому базису с вычислением матрицы перехода.
a. Матрица управляемости  исходной системы (она была определена выше при определении устойчивости системы). исходной системы (она была определена выше при определении устойчивости системы).

Как было определено ранее, система управляема.
b. Определяем характеристические полиномы  и и  . .
Спектр исходной системы:
 , ,
 . .
Коэффициенты характеристического полинома:
 , ,
 , ,
 . .
Для желаемого спектра
 : :

Коэффициенты характеристического полинома:
 , ,
 , ,
 . .
c. Составляем сопровождающую матрицу полинома.
 , ,
 . .
d. Вычисляем матрицу управляемости преобразованной системы.
e. Определяем матрицу перехода.
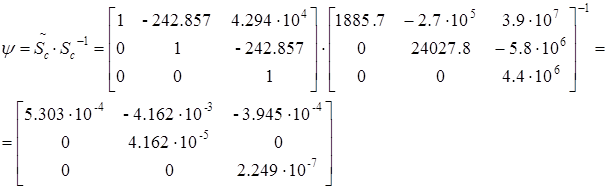
2. Расчёт параметров модального регулятора преобразованной системы.
 , ,
 , ,
 , ,
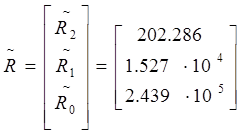
3. Переход к исходному базису и расчёт коэффициентов модального регулятора.
 , ,
4. Определение спектра синтезированной системы.
В исходном базисе:
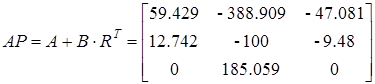


В каноническом базисе:


Коэффициенты характеристических полиномов синтезированной системы в исходном и в канонически управляемом базисе совпадают, что свидетельствует о правильности приведенных преобразований.
В Приложении 3 построены временные и частотные характеристики синтезированной системы.
4.4 Метод синтеза с использованием оптимизационных процедур
Здесь используется приближенное равенство реального выходного сигнала эталонному. В основе реализации этого принципа лежит аппарат нелинейного программирования. Основное содержание состоит в следующем:
Необходимо определить оператор компенсатора:
 . .
Задаются эталонные воздействия  и реакция на это воздействие и реакция на это воздействие  . .
Проблема синтеза состоим в выборе таких значений параметров  , которые обеспечивают близость в известном смысле выходного сигнала реальной системы , которые обеспечивают близость в известном смысле выходного сигнала реальной системы  и эталона . и эталона .
Положим, что мерой близости выбрана метрика пространства 
 . .
Отклонения необходимо свести к минимуму.
Если же воспользоваться метрикой пространства  то: то:
 . .
По каждым значениям идет оценка.
В функционалы x1
и x2
входит функция  . .

Для реализации принципа необходимо знать обратный оператор системы, явно зависящий от параметров регулятора. Это чрезвычайно сложная задача, решение которой возможно в исключительно простых случаях.
ЗАКЛЮЧЕНИЕ
В результате проделанной работы, получены характеристики и параметры, позволяющие судить о параметрах синтезированной системы.
Можно сказать, что синтез проведен удачно. Об этом позволяют судить полученные при моделировании временные и частотные характеристики. Заданные показатели качества достигнуты, а именно:
- перерегулирование  %; %;
- время регулирования  с.; с.;
- порядок астатизма 1.
Так же надо заметить, что чем меньше время регулировании, тем выше энергетические затраты на разгон двигателя. Очевидно, эта энергия не может быть бесконечной. При определенном значении входного напряжения и тока якорной обмотки может произойти аварийная ситуация. Поэтому при выборе времени регулирования необходимо учитывать и энергетическую сторону процесса.
ЛИТЕРАТУРА
1. Прошин И.А. Управление в вентильно-электромеханических системах. В 3-х кн. Кн. 2. Математическое моделирование вентильно-электромеханических систем. – Пенза: Изд-во Пенз. гос. технолог. акад., 2004. – 307 с.
2. Прошин И.А. Управление в вентильно-электромеханических системах. В 3-х кн. Кн. 1. Непосредственные преобразователи электрической энергии. – Пенза: Изд-во Пенз. гос. технолог. акад., 2004. – 333 с.
3. Прошин И.А. Управление в вентильно-электромеханических системах. В 3-х кн. Кн. 3. Синтез управляемых вентильно-электромеханических систем. – Пенза: ПТИ, 2003. – 350с.
4. Математическое моделирование и обработка информации в исследованиях на ЭВМ./И.А. Прошин, Усманов В.В.; Под ред. И.А. Прошина. – Пенза: ПТИ, 2000. – 422с.
5. Теория систем автоматического управления/В.А. Бесекерский, Е.П. Попов. – Изд. 4-е, перераб. и доп. – СПб, Изд-во «Профессия», 2003. – 752 с.
|