| Министерство образования РФ
Самарский Государственный Аэрокосмический Университет имени академика С.П. Королева (Тольяттинский филиал)
Кафедра математики и механики
Курсовая работа по теоретической механике
по теме:
«Исследование движения механической системы с двумя степенями свободы»
Тольятти 2006 г.
Содержание
Введение
1. Исходные данные
2. Исследование относительного движения материальной точки
3. Применение общих теорем динамики к исследованию движения механической системы
3.1. Составление уравнения движения твердого тела с помощью теоремы об изменении кинетического момента
3.2. Определение закона изменения внешнего момента, обеспечивающего постоянство угловой скорости
4. Определение реакций в опорах вращающегося тела
5. Исследование движения механической системы с двумя степенями свободы с помощью уравнений Лагранжа II рода
5.1. Составление уравнений движения системы методом Лагранжа
5.2. Получение дифференциального уравнение относительного движения материальной точки
5.3. Определение закона изменения внешнего момента, обеспечивающего постоянство угловой скорости
6. Определение положений равновесия механической системы и исследование их устойчивости
Заключение
Список использованных источников
Введение
Изучение теоретической механики как одной из фундаментальных физико-математических дисциплин играет важную роль в подготовке специалистов по механико-математическим и инженерным механическим направлениям. Оно позволяет будущим специалистам не только получить глубокие знания о природе, но и вырабатывает у них необходимые навыки для решения сложных научных и технических задач, для которых требуется построение математических моделей разнообразных механических систем, развивает способности к научным обобщениям и выводам.
Для закрепления навыков самостоятельного решения задач механики во втором семестре изучения теоретической механики студенты СГАУ выполняют курсовую работу, в которой необходимо провести комплексный анализ движения системы с двумя степенями свободы, пользуясь различными методами теоретической механики.
Теоретическая механика, как часть естествознания, использующая математические методы, имеет дело не с самими материальными объектами, а их математическими моделями. Такими моделями являются материальные точки, системы материальных точек, твердые тела и деформируемая сплошная среда. В курсовой работе рассматриваются простейшие системы, которые состоят из твердых тел, совершающих простейшие движения, и перемещающейся по телу материальной точки.
1. Исходные данные
Сплошной равносторонний треугольник  со стороной со стороной  , имеющий массу , имеющий массу  вращается вокруг шарнира вращается вокруг шарнира  . В точке . В точке  – середине канала – середине канала  , на пружине жёсткостью , на пружине жёсткостью  закреплён шарик массой закреплён шарик массой  . При вращении треугольника шарик может совершать колебательные движения вдоль канала . . При вращении треугольника шарик может совершать колебательные движения вдоль канала .
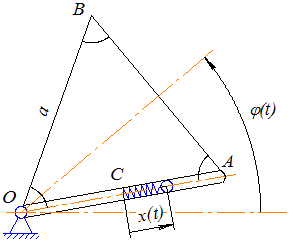
Рисунок 1.1. Схема механической системы
2. Исследование относительного движения материальной точки
Движение материальной точки в подвижной системе отсчета описывается дифференциальным уравнением относительного движения:
 (1.1) (1.1)
Здесь  – относительное ускорение материальной точки; – относительное ускорение материальной точки;  – сумма всех внешних и внутренних сил; – сумма всех внешних и внутренних сил;  и и  – переносная и кориолисова силы инерции соответственно. – переносная и кориолисова силы инерции соответственно.
Свяжем подвижную систему отсчета  с движущимся вдоль канала шариком. Ось с движущимся вдоль канала шариком. Ось  проведём вдоль канала, причём возрастание координаты проведём вдоль канала, причём возрастание координаты  сонаправленно с движением шарика относительно трубки; а ось сонаправленно с движением шарика относительно трубки; а ось  направим перпендикулярно ей. Вращение треугольника вместе с системой координат направим перпендикулярно ей. Вращение треугольника вместе с системой координат  вокруг шарнира является переносным движением для шарика. Относительным движением является его перемещение вдоль канала . вокруг шарнира является переносным движением для шарика. Относительным движением является его перемещение вдоль канала .
Дифференциальное уравнение движения (2.1) для данной системы примет вид:
 (2.2) (2.2)
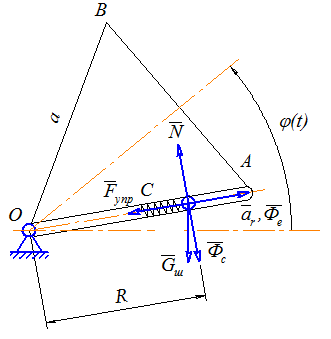
Рисунок 2.1. Исследование относительного движения материальной точки
Абсолютные значения сил:
 ; ;
 , где , где  ; ;
 – при постоянной угловой скорости вращения – при постоянной угловой скорости вращения  , тогда , тогда  , где , где  – радиус вращения шарика вокруг шарнира – радиус вращения шарика вокруг шарнира  ; ;
 , т. к. угол между относительной и угловой скоростями прямой, отсюда , т. к. угол между относительной и угловой скоростями прямой, отсюда  , а направление определяется по правилу Жуковского. , а направление определяется по правилу Жуковского.
Возьмём проекцию дифференциального уравнения относительного движения (2.2) на координатную ось  подвижной системы координат: подвижной системы координат:
 (2.3) (2.3)
Радиус переносного вращения шарика:
 (2.4) (2.4)
С учётом значений сил и формулы (2.4), уравнение (2.3) принимает вид:

Отсюда получаем значение реакции связи  : :
 (2.5) (2.5)
В приложении к курсовой работе изображён график зависимости  (рис. 2). (рис. 2).
Теперь спроецируем дифференциальное уравнение (2.2) на координатную ось :
 (2.6) (2.6)
При подстановке известных значений получим:
 (2.7) (2.7)
Приведём (2.7) к следующему виду:
 (2.8) (2.8)
Здесь  – это собственная частота. Для нахождения зависимости – это собственная частота. Для нахождения зависимости  решим данное уравнение. решим данное уравнение.
 – решение искомого дифференциального уравнения будет складываться из общего решения соответствующего однородного уравнения – решение искомого дифференциального уравнения будет складываться из общего решения соответствующего однородного уравнения  и любого частного решения и любого частного решения  . .
Общее решение имеете вид:  (2.9). (2.9).
Найдём частное решение уравнения (2.8), оно будет иметь вид:  . Первая и вторая производные: . Первая и вторая производные:  , ,  . .
Подставляя частное решение и его производные в (2.8), получим:

Находим значения постоянных коэффициентов:  , ,  . .
 (2.10) (2.10)
Тогда, исходя из (2.9) и (2.10), решение исходного дифференциального уравнения:

Для определения констант интегрирования, используем начальные условия:
 , ,  или или  ; откуда ; откуда  . .

 , ,  или или  , откуда , откуда  . .
Подставив значения  и и  , и сгруппировав слагаемые, получим дифференциальные уравнения относительного движения шарика и его скорости: , и сгруппировав слагаемые, получим дифференциальные уравнения относительного движения шарика и его скорости:
 (2.11) (2.11)
Здесь ,  , , , ,  , . , .
В приложении к курсовой работе изображён график зависимости  (рис. 1). (рис. 1).
3. Применение общих теорем динамики к исследованию движения механической системы
3.1 Составление уравнения движения твердого тела с помощью теоремы об изменении кинетического момента
Механической системой называется такая совокупность материальных точек, в которой положение и движение каждой точки зависит от положения и движения остальных точек. Получаемые для системы материальных точек теоремы и соотношения можно распространить и на системы, состоящие из одного или нескольких взаимосвязанных твердых тел. Ограничения, накладываемые на движение точек и тел механической системы, называются связями. Исходя из принципа освобождаемости от связей, движение каждой точки системы можно рассматривать как движение свободной точки, если заменить действие связей реакциями этих связей. Тогда для каждой точки, согласно основному уравнению динамики материальной точки, имеем:
 (3.1.1) (3.1.1)
 и и  – масса и ускорение некоторой точки механической системы; – масса и ускорение некоторой точки механической системы;  и и  – внешние и внутренние силы (уже включают в себя реакции связей). – внешние и внутренние силы (уже включают в себя реакции связей).
Уравнение (3.1.1) – это основное уравнение динамики, следствием его являются теоремы о движении центра масс механической системы и об изменении количества движения, теоремы об изменении кинетического момента и кинетической энергии. Теорема об изменении кинетического момента применяется для решения задач, в которых рассматривается движение механической системы, состоящей из центрального тела, вращающегося вокруг неподвижной оси, и одного или нескольких тел, движение которых связано с центральным. Связь может осуществляться при помощи нитей, тела могут перемещаться по поверхности центрального тела или в его каналах за счёт внутренних сил. С помощью данной теоремы можно определить зависимость закона вращения центрального тела от положения или движения остальных тел.
Теорема об изменении кинетического момента формулируется следующим образом: полная производная по времени от вектора кинетического момента механической системы относительно некоторого неподвижного центра  по величине и направлению равна главному моменту внешних сил, приложенных к механической системе, определенному относительно того же центра: по величине и направлению равна главному моменту внешних сил, приложенных к механической системе, определенному относительно того же центра:
 (3.1.2) (3.1.2)
Здесь  – кинетический момент механической системы относительно неподвижного центра – кинетический момент механической системы относительно неподвижного центра  ; он является мерой движения системы вокруг этого центра и складывается из кинетических моментов всех точек и тел, входящих в эту систему; ; он является мерой движения системы вокруг этого центра и складывается из кинетических моментов всех точек и тел, входящих в эту систему;  – главный момент внешних сил относительно неподвижного центра . – главный момент внешних сил относительно неподвижного центра .
Определим главный момент внешних сил:
 , где , где  и и  – плечи сил тяжести шарика и треугольника; – плечи сил тяжести шарика и треугольника;
 (3.1.3) (3.1.3)
Определим кинетический момент системы. Он складывается из кинетических моментов шарика и треугольника:  . .
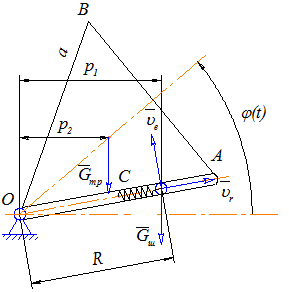
Рисунок 3.1.1. Составление уравнения движения твердого тела с помощью теоремы об изменении кинетического момента
 , где модуль переносной скорости равен , где модуль переносной скорости равен  . .
 (3.1.4) (3.1.4)
 , ,  – момент инерции треугольника – момент инерции треугольника  относительно шарнира . Определим его по теореме Штейнера: относительно шарнира . Определим его по теореме Штейнера:
 (3.1.5) (3.1.5)
 (3.1.6) (3.1.6)
Учитывая (3.1.4) и (3.1.6), кинетический момент системы равен:
 (3.1.7) (3.1.7)
Продифференцируем выражение (3.1.7):
 (3.1.8) (3.1.8)
Подставив найденные значения в (3.1.2), теорема об изменении кинетического момента примет вид:
 (3.1.9) (3.1.9)
3.2 Определение закона изменения внешнего момента, обеспечивающего постоянство угловой скорости
При действии внешнего момента  , обеспечивающего равномерное вращение механической системы вокруг шарнира , последнее слагаемое в левой части равенства (3.1.9) обращается в нуль: , обеспечивающего равномерное вращение механической системы вокруг шарнира , последнее слагаемое в левой части равенства (3.1.9) обращается в нуль:
 , ,  ; отсюда ; отсюда  . .
Тогда выражение (3.1.9) примет вид:
 (3.2.1) (3.2.1)
 направлен противоположно главному моменту внешних сил, то есть, против часовой стрелки. направлен противоположно главному моменту внешних сил, то есть, против часовой стрелки.
Внешний момент, обеспечивающий равномерное вращение конструкции, равен:
 (3.2.2) (3.2.2)
В приложении к курсовой работе изображён график зависимости  (рис. 3). (рис. 3).
4. Определение реакций в опорах вращающегося тела
Определим реакции в опоре вращающегося тела методом кинетостатики. Он заключается в решении задачи динамики средствами (уравнениями) статики. Для каждой точки механической системы справедливо основное уравнение динамики:
 (4.1) (4.1)
Здесь  и и  – масса и ускорение некоторой точки системы; – масса и ускорение некоторой точки системы;  – сумма всех активных сил и реакций связей, приложенных к ней. – сумма всех активных сил и реакций связей, приложенных к ней.
Основному уравнению динамики (4.1) можно придать вид уравнения статики:
 (4.2) (4.2)
Здесь  – сила инерции точки механической системы. – сила инерции точки механической системы.
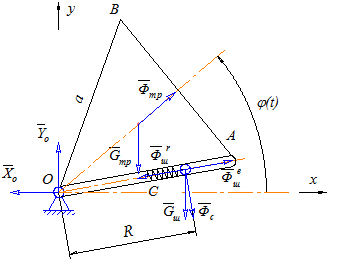
Рисунок 4.1. Определение реакций в опорах вращающегося тела
Для заданной механической системы уравнение статики (4.2) имеет вид:
 (4.3) (4.3)
Для определения реакции шарнира нам необходимо и достаточно взять за координатные оси – неподвижные оси  и и  , и определить составляющие реакции шарнира на эти оси: , и определить составляющие реакции шарнира на эти оси:
  (4.4) (4.4)
Отсюда:

Подставив значения сил, получим:
 (4.5) (4.5)
Теперь спроецируем (4.2) на неподвижную ось :
  (4.6) (4.6)
Отсюда:

Подставив известные значения сил, получим:
 (4.7) (4.7)
Полную реакцию в шарнире  можно найти по формуле: можно найти по формуле:  , где , где  и и  определяются выражениями (4.5) и (4.7); график её зависимости от времени приведён в приложении к курсовой работе (рис. 4). определяются выражениями (4.5) и (4.7); график её зависимости от времени приведён в приложении к курсовой работе (рис. 4).
5. Исследование движения механической системы с двумя степенями свободы с помощью уравнений Лагранжа
II
рода
5.1 Составление уравнений движения системы методом Лагранжа
Уравнения второго рода являются одним из наиболее удобных приёмов составления уравнений движения механических систем. Они имеют следующий вид:
  (5.1.1) (5.1.1)
Здесь  – кинетическая энергия системы; – кинетическая энергия системы;  , ,  , ,  , – обобщённые координаты, скорости и силы соответственно; , – обобщённые координаты, скорости и силы соответственно;  – число степеней свободы. – число степеней свободы.
Уравнения (5.1.1) образуют систему уравнений второго порядка относительно функций  , а порядок данной системы равен , а порядок данной системы равен  . Форма уравнений Лагранжа не зависит от выбора обобщённых координат . Форма уравнений Лагранжа не зависит от выбора обобщённых координат  . В связи с этим говорят, что уравнения Лагранжа второго рода обладают свойством инвариантности. . В связи с этим говорят, что уравнения Лагранжа второго рода обладают свойством инвариантности.
Как видно из (5.1.1), для получения уравнений Лагранжа необходимо найти соответствующие производные от кинетической энергии системы и определить обобщённые силы.
Определим кинетическую энергию системы. Она будет складываться из кинетических энергий треугольника и шарика:  . .

Подставив значение  из (3.1.5), получим: из (3.1.5), получим:
 (5.1.2) (5.1.2)
Кинетическая энергия шарика определяется его массой и относительной и переносной скоростями:

С учётом известных значений скоростей, получим:
 (5.1.3) (5.1.3)
Кинетическая энергия системы равна:
 (5.1.4) (5.1.4)
Найдём производные от кинетической энергии согласно (5.1.1):

 (5.1.5) (5.1.5)  (5.1.6) (5.1.6)
  (5.1.7) (5.1.7)  (5.1.8) (5.1.8)
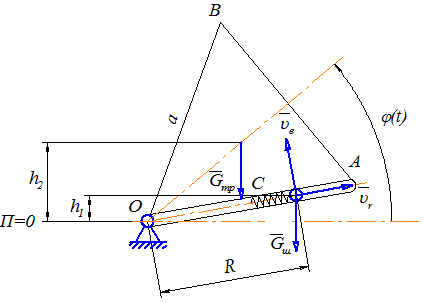
Рисунок 5.1.1. Определение кинетической и потенциальной энергий системы
Теперь, исходя из (5.1.1), нужно определить обобщённые силы. Данная механическая система является консервативной, мы можем определить обобщённые силы через потенциальную энергию по формуле:
 (5.1.9) (5.1.9)
Найдём потенциальную энергию. Она будет складываться из работ консервативных сил по перемещению тела из нулевого положения:  . За нулевой уровень потенциальной энергии выберем начальный момент времени, при . За нулевой уровень потенциальной энергии выберем начальный момент времени, при  : :
 – энергия положения шарика; – энергия положения шарика;
 – энергия положения прямоугольника; – энергия положения прямоугольника;
 – потенциальная энергия силы упругости; – потенциальная энергия силы упругости;
Потенциальная энергия системы равна:
 (5.1.10) (5.1.10)
Найдём обобщённые силы:
 (5.1.11) (5.1.11)
 (5.1.12) (5.1.12)
Теперь можем записать систему уравнений Лагранжа II рода:
 (5.1.13) (5.1.13)
 (5.1.14) (5.1.14)
5.2 Получение дифференциального уравнение относительного движения материальной точки
(5.1.13) и (5.1.14) – это система уравнений Лагранжа II рода; первое из них представляет собой дифференциальное уравнение относительного движения. При сравнении (5.1.13) с уравнением относительного движения (2.7) видно, что уравнения тождественны:
 (2.7) (2.7)
 (5.1.13) (5.1.13)
5.3 Определение закона изменения внешнего момента, обеспечивающего постоянство угловой скорости
(5.1.14) – это уравнение уравнения движения твердого тела без ограничения на закон изменения угловой скорости вращения. Определим величину внешнего момента, обеспечивающего равномерное вращение:
 (5.1.14) (5.1.14)
  
При действии внешнего момента, обеспечивающего равномерное вращение, уравнение (5.1.14) примет вид:
 (5.3.1) (5.3.1)
Отсюда:
 (5.2.2) (5.2.2)
Сравним с полученным ранее значением:
 (3.2.2) (3.2.2)
Итак, два разных способа определения внешнего момента дали один результат.
6. Определение положений равновесия механической системы и исследование их устойчивости
Важным случаем движения механических систем является их колебательное движение. Колебания – это повторяющиеся движения механической системы относительно некоторого ее положения, происходящие более или менее регулярно во времени. В курсовой работе рассматривается колебательное движение механической системы относительно положения равновесия (относительного или абсолютного).
Механическая система может совершать колебания в течение достаточно длительного промежутка времени только вблизи положения устойчивого равновесия. Поэтому перед тем, как составить уравнения колебательного движения, надо найти положения равновесия и исследовать их устойчивость.
Согласно основному уравнению статики, для того чтобы механическая система находилась в равновесии, необходимо и достаточно, чтобы в этой системе были равны нулю все обобщенные силы:
  (6.1) (6.1)
 – обобщённые силы; – обобщённые силы;  – число обобщённых координат в механической системе. – число обобщённых координат в механической системе.
В нашем случае механическая система находится в потенциальном силовом поле; из уравнений (6.1) получаем следующие условия равновесия:
 (6.2) (6.2)
Следовательно, в положении равновесия потенциальная энергия имеет экстремальное значение. Не всякое равновесие, определяемое вышеприведенными формулами, может быть реализовано практически. В зависимости от поведения системы при отклонении от положения равновесия говорят об устойчивости или неустойчивости данного положения. Достаточные условия устойчивости положений равновесия для консервативных систем определяются теоремой Лагранжа – Дирихле: «Положение равновесия консервативной механической системы устойчиво, если в нём потенциальная энергия системы имеет изолированный минимум».
Определим положения равновесия для заданной механической системы, используя ранее найденные обобщённые силы (5.1.11) и (5.1.12) из системы уравнений:
   (6.4) (6.4)
Решение системы средствами MathCAD приведено в приложении Б к курсовой работе.
Для нашей механической системы имеем:
Первое положение равновесия:  , ,  . .
Второе положение равновесия:  , ,  . .
Используя теорему Лагранжа – Дирихле определяем, что первое положение равновесия является не устойчивым, а второе – устойчивым.
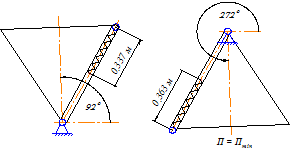
Рисунок 6.1. Положения равновесия механической системы
Найдем вторые производные от потенциальной энергии по обобщенным координатам:
(6.5)

Для исследования устойчивости положения равновесия необходимо исследовать на знакоопределенность матрицу жесткости, составленную из значений выражения (6.5) в этом положении равновесия.
| 1) 
|
Положение равновесия не устойчивое
| 2) 
|
Положение равновесия устойчивое
Заключение
В данной курсовой работе была исследована механическая система с двумя степенями свободы. В результате были достигнуты изначально поставленные цели, а именно:
- получен закон относительного движения материальной точки;
- составлено уравнение движения твердого тела с помощью теоремы об изменении кинетического момента, определено значение внешнего момента, обеспечивающего равномерное вращение конструкции;
- найдены реакции в опорах вращающегося тела;
- проведено исследование движения механической системы с помощью уравнений Лагранжа II рода, в результате которого получены уравнение относительного движения материальной точки и закон изменения внешнего момента, обеспечивающего постоянство угловой скорости;
- определены положения равновесия механической системы и исследована их устойчивость;
В приложениях к курсовой работе приведены результаты численного интегрирования, а так же графики зависимостей определяемых величин.
Список использованных источников
1. Бутенин Н.В., Лунц Я.Л. и др.: Курс теоретической механики, том 1 и том 2, Москва, «Наука», 1970.
2. Яблонский А.А., Норейко С.С.: Курс теории колебаний, Москва, Высшая школа, 1966.
3. Динамика точки и механической системы: Учебное пособие для курсового проектирования / Авраменко А.А., Архипов В.В., Асланов В.С., Тимбай И.А.; Под ред. проф. В.С. Асланова. – Самарский государственный аэрокосмический университет, Самара, 2001 – 84 с.
|